“空地水”一體化測繪技術在航道測量中的應用
2023-10-14 05:41:24張旻
鐵道勘察 2023年5期
張 旻
(中鐵第四勘察設計院有限公司,武漢 430063)
引言
長江航道途經地域地形復雜多變,受各種自然條件的影響,航道一直處于動態變化之中。 另一方面,工程建設也影響到航道的周邊環境,定期地形監測對了解航道運行現狀,制定航道整治方案,動態指導航道疏浚施工及維護至關重要。 長江航道測繪的主要內容有:航道水深監測、整治建筑物沉降位移及水毀監測、岸線變化及堤岸穩定性監測、沙洲體積變化監測、航道輔助設施狀態監測等。 已有學者展開相關研究,鄒小鋒等對長江航道測繪存在的問題及建設方向進行研究[1];石碩崇概述國內外航道測繪的研究現狀,并對長江航道測繪的研究和發展提出了建議[2];蔡顏夢等介紹近年來長江航道測繪信息成果的相關情況,針對長江航道測繪地理信息成果管理體系建設內容展開了分析,內容包括數據成果分析、建設數據中心、大數據成果管理、數據異質備份及數據分析和使用等[3];胥洪川等為進一步提高河道業務生產效率,保證數據成果質量,設計了長江上游河道業務處理系統[4]。 目前,航道常規地形、地物數據采集方法主要包括RTK陸上地形測量、單波束水下地形水深測量等,測繪成果通常只能以坐標點、矢量線形式體現在圖紙上,無法獲取測區直觀的影像資料,并且受現場測量技術和條件的制約,在測區較大、特殊或危險地區、測量時間緊、任務重、通航或施工繁忙等情況下,難以保證測量的時效性、一致性和完整性等方面充分滿足需求。
1 長江航道測量現狀
近年來,隨著無人機低空攝像測量、多波束掃測、三維激光掃描等高新測繪技術的發展和應用,常規測繪方式的不足已得到了部分緩解,能夠提供更豐富、更直觀、更全面的測繪成果。 徐鵬鵬等論述無人機攝影測量和三維激光掃描儀互補的測量方法在陸上測量實例中的應用[5];孫愛國等認為,在合適的內外部條件下,無人機測量技術適用于長江航道1 ∶500 等大比例測圖場景[6];袁曹振等引入無人機低空攝影測量技術對航道整治建筑物實施1 ∶1 000 大比例觀測,獲取了亞米級的高清影像數據,生產了DOM 和DSM、DLG 數字地形圖數據[7];梁達煒等概述多波束、激光雷達、無人船、無人機等測繪設備在航道測量中的必要性[8];馬隨陽等針對橋梁測量的傳統測量方法、無人機傾斜攝影與地面三維激光掃描耦合方法,開展了橋梁三維建模方法對比研究,系統分析兩者的技術特點與不足,并提出航道測繪技術創新的建議[9]。
對于低空攝影測量而言,無人機結構簡單、機動靈活,是獲取陸地測繪數據的一種重要技術手段,能夠獲取高清晰、大比例、高現勢性的影像資料,可直觀反映測區的岸線、建筑、特種地物地貌等。 但在蘆葦、樹林等地面遮擋嚴重的區域和特殊地形區域(如陡岸、崩岸),其測量精度難以達到要求,也無法承擔水下地形、地物測量任務。 對于三維激光掃描而言,該測繪技術可獲取被掃對象表面的三維坐標和深度影像信息,構建高精度的三維模型,具有精度高、速度快等優點,但其成本高,數據處理復雜,只適用于對部分重點區域、重點地物的掃描。 付作民等分析了在巷道管理中應用多波束測深系統開展測量的相關流程及測探結果[10];李宇輝等針對航道測繪中需全覆蓋、高精度測量問題,結合工程項目的實際情況,探討多波束測深儀在航道測繪中的應用效果[11]; 楊海忠等以SEABAT8125 多波束測深系統在某航道疏浚工程為研究對象,探討多波束測深系統安裝測試方法、定位導航實施方法、測量步驟與數據處理思路[12]。 邊志剛等通過對船載水上水下一體化綜合測量系統實施海島礁、陜西黑河水庫一體化測量案例,闡明系統在應用中的優缺點[13]。 趙春明等對水上水下無縫一體化測量進行了探討,對陸海垂直測繪基準統一的測量方法進行了嘗試[14];一體化快速測繪系統是將多種測繪傳感器集成在同一個載體上,進行空中、地面及水下的一體化測繪,同步采集多目標數據[15-17]。 對于多波束測量而言,其測量精度可與單波束測量相當,但效率遠高于常規單波束水深測量,可極大提高水下地形測繪效率,但其只適用于具備一定水深條件的水域,不適用于淺區及陸上地形測量。 為了克服傳統測繪中測量點離散、成果形式單一、作業效率低下等缺點,對長江航道測量開展“空地水”一體化測繪技術研究。
2 系統組成原理及架構
2.1 系統主要技術參數
一體化多源數據融合處理及可視化編輯系統平臺可以對航道多種測繪技術進行協同采集與數據融合處理,并自動生成基于多源數據的航道地形數字地面模型,對航道整治工程河道影響變化進行多時相分析,進而實現多源數據管理與展示。 “一體化測量系統”的主要設備見表1。
3.2 系統架構
平臺架構分為數據管理、多源數據導入、數據編輯處理、數據分析及成果輸出等5 個部分(見圖1)。
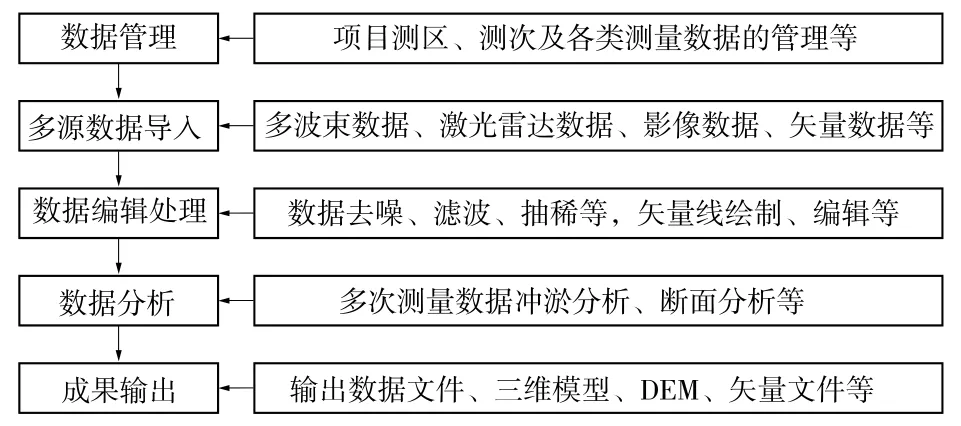
圖1 多源數據融合系統架構
(1) 多源數據管理
“空地水”一體化測繪包括控制測量、無人機航攝、多波束水深測量和激光雷達測量4 個方面的數據,系統平臺通過工程管理實現了對原始控制數據、點云數據、影像數據,以及加工后的產品數據等數據的存儲管理[18]。
(2) 多源數據導入與融合
系統能導入項目涉及的數據源。 如控制成果、激光點云、全景影像、正射影像和三維模型等,可將水上水下數據在平臺中進行融合。
(3) 數據編輯處理
系統平臺可對點云數據及矢量數據進行編輯處理,其主要功能框架見圖2。
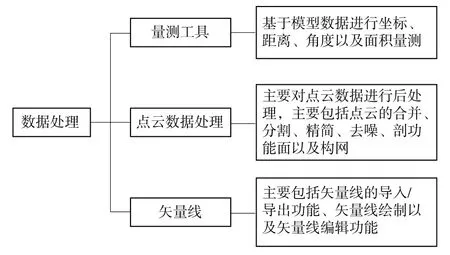
圖2 數據處理框架
(4) 數據展示與分析
支持多種模式的點云渲染及數據顯示,利用多波束水深數據,提取航道斷面,通過不同時期測量成果的斷面疊加,對航道演變進行分析。
(5) 數據成果與輸出
包括輸出數據文件、三維模型、DEM、矢量文件等。
3 系統關鍵技術研究
3.1 多源數據一體化協同融合處理技術
軟件平臺研發過程中綜合采用上述技術,即利用實景數據和高密度點云三維坐標對航道沿岸地形空間數據和屬性數據進行一體化采集,研究多源數據的協同融合處理技術,依據統一的數據標準進行處理融合及加工處理,以用于數據融合展示與分析。 基于自主研發的后處理軟件,進行針對性定制開發,將多源測量數據所具有的不同時間和空間基準進行高精度配準,實現了無人機攝影測量、三維激光掃描、多波束測量以及單波束測量多種傳感器采集的數據協同處理生產,構建了“空地水”一體化的航道測繪和動態監測體系。
3.2 航道多源數據可視化集成與展示應用技術
長江航道地理數據形式多樣、維度不一,既有空間數據也有屬性數據,既有刪格數據也有矢量數據。 如何對這些數據進行統一管理和展示,尤其是水上水下三維地形地物的展示,是本系統的一個關鍵點。
將獲取的高精度航空攝影數據、水上水下點云數據等進行集中海量存儲管理,并通過研發三維地形集成展示平臺實現多源數據、三維動畫、航拍影像展示,以及大比例的 DLG、DOM、DEM 測繪產品的展示和重點區域、整治建筑物的三維場景展示[19-20]。
3.3 TB 級海量點云引擎技術
多源數據不同于傳統的4D 產品,傳統的數據量一般為百兆級別,而多源數據一般為GB 至TB 級別。海量數據的存儲、管理、調用等是系統平臺運轉的關鍵。 三維激光掃描儀點采集速度可達1 000 000 點/s,掃描采集一個場景通常可獲得上百萬個點;多波束測深儀以全覆蓋方式采集水下地形數據,其數據量也達到了TB 級。 根據現場作業時的掃描視場與掃描速度設置,一次作業需要掃描的點云數量可達億級。 以一個測次數據量為例,三維激光雷達采集的數據量見表2。
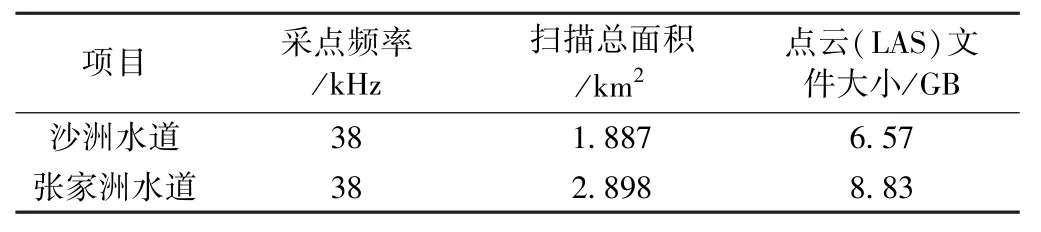
表2 三維激光雷達采集數據量
4 長江航道應用示例
為了驗證多源數據融合處理及展示平臺在長江航道測量中的適用性,選取了武安段航道整治項目中的張家州水道和沙洲水道的護岸工程、護底帶工程、護灘工程作為算例。 張家洲水道和沙洲水道涵蓋了長江干線航道的沖刷、淤積、沖槽、崩塌、分流等現象,其地形復雜,航道整治工程種類多樣,能夠代表長江航道整治的主要情況,按照上文介紹的技術路線,在試驗區域現場進行系統的聯合運行調試和應用,包括實地采集各項數據、利用軟件進行數據處理等,開展多種測繪技術協同采集與數據融合處理技術應用,對成果數據進行動態可視化展示和分析。
利用多波束水深數據,提取航道斷面,通過不同時期測量成果的斷面疊加,對航道演變進行分析。
此外,在多波束測量數據中截取工程區中的重點斷面(見圖3、圖4),與工程區的設計文件進行斷面對比。 分析工程區的變化情況(見圖5、圖6),其中,紫色線為設計測量河床線,藍色線為2020 年9 月測量河床線,通過對比,可以清楚地看出工程實施后河床地形的變化,以分析工程的實施效果。
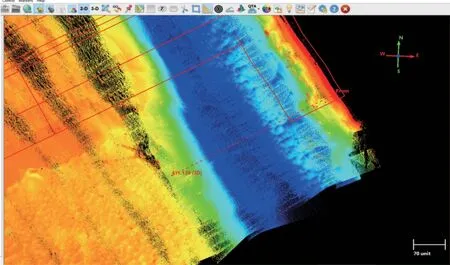
圖3 重點斷面位置選擇
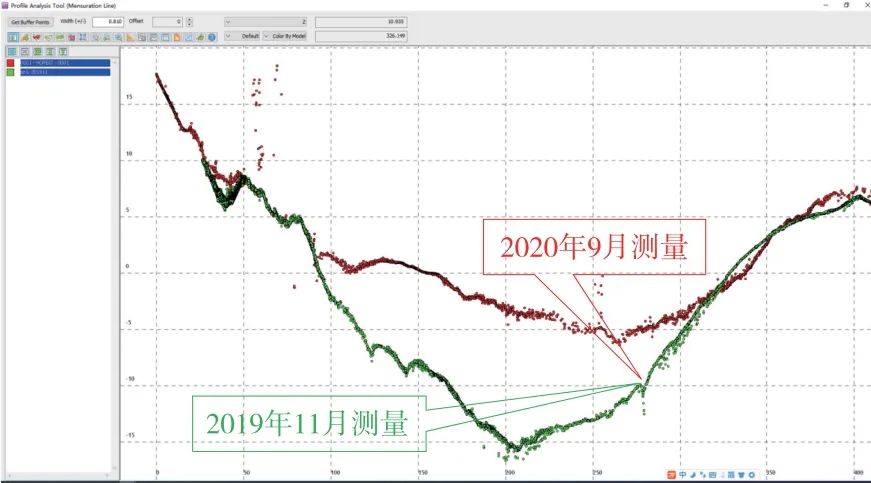
圖4 重點斷面高程位置

圖5 沙洲水道左汊護底工程軸線斷面比較(單位:m)

圖6 沙洲水道左汊護底工程2 個橫斷面比較(單位:m)
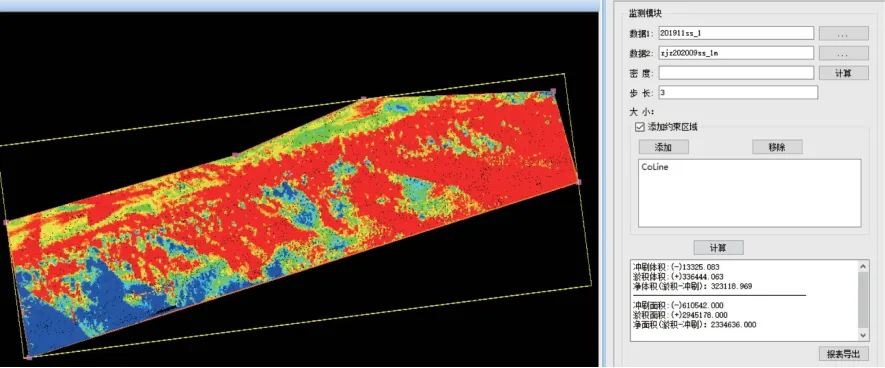
圖7 兩期數據對比的沖淤變化
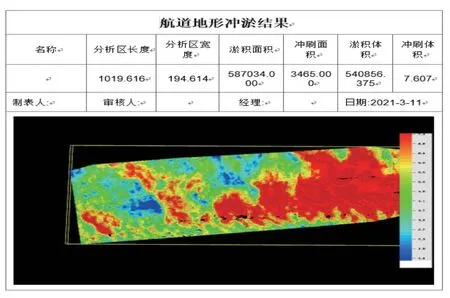
圖8 報表導出結果
對同一區域不同測次的數據進行沖淤分析,計算沖淤量,分析航道沖淤情況,為航道清淤決策提供依據。
長江航道地理數據形式多樣、維度不一,既有空間數據也有屬性數據,既有刪格數據也有矢量數據,研究的航道多源數據可視化集成系統可將三維實景、點云管理展示引擎進行二次開發集成,將獲取得到的高精度航空攝影數據、水上水下點云數據等進行集中海量存儲管理,研發三維地形集成展示平臺實現多源數據展示、三維動畫展示、航拍影像展示、大比例的 DLG、DOM、DEM 測繪產品的展示,以及重點區域、整治建筑物的三維場景展示。
5 精度分析
(1) 多波束測深精度分析
多波束測深平面中誤差達到0.19 m,高程中誤差達到0.18 m,具體統計情況見表3。
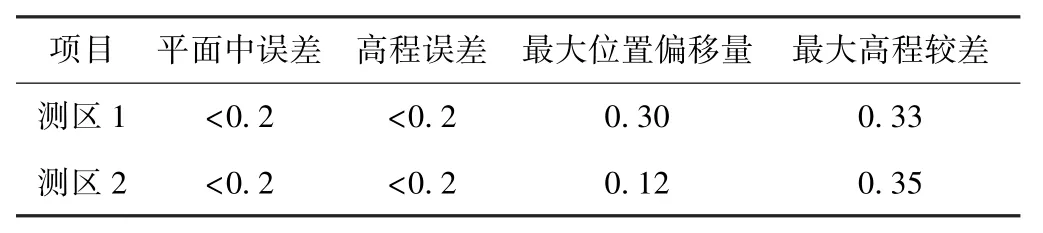
表3 多波束水深比對結果m
(2)激光雷達點云精度分析
為檢核激光雷達數據的精度,實施測量時,在沙洲水道測區選擇10 個,在張家洲水道測區選擇了41 個具有明顯特征的點進行觀測,獲取其精準的平面坐標及高程值,與激光雷達采集的點云數據中的同名點進行比對,以獲取點云的平面及高程精度。張家洲水道測區激光雷達數據平面及高程精度分析見表4、表5。
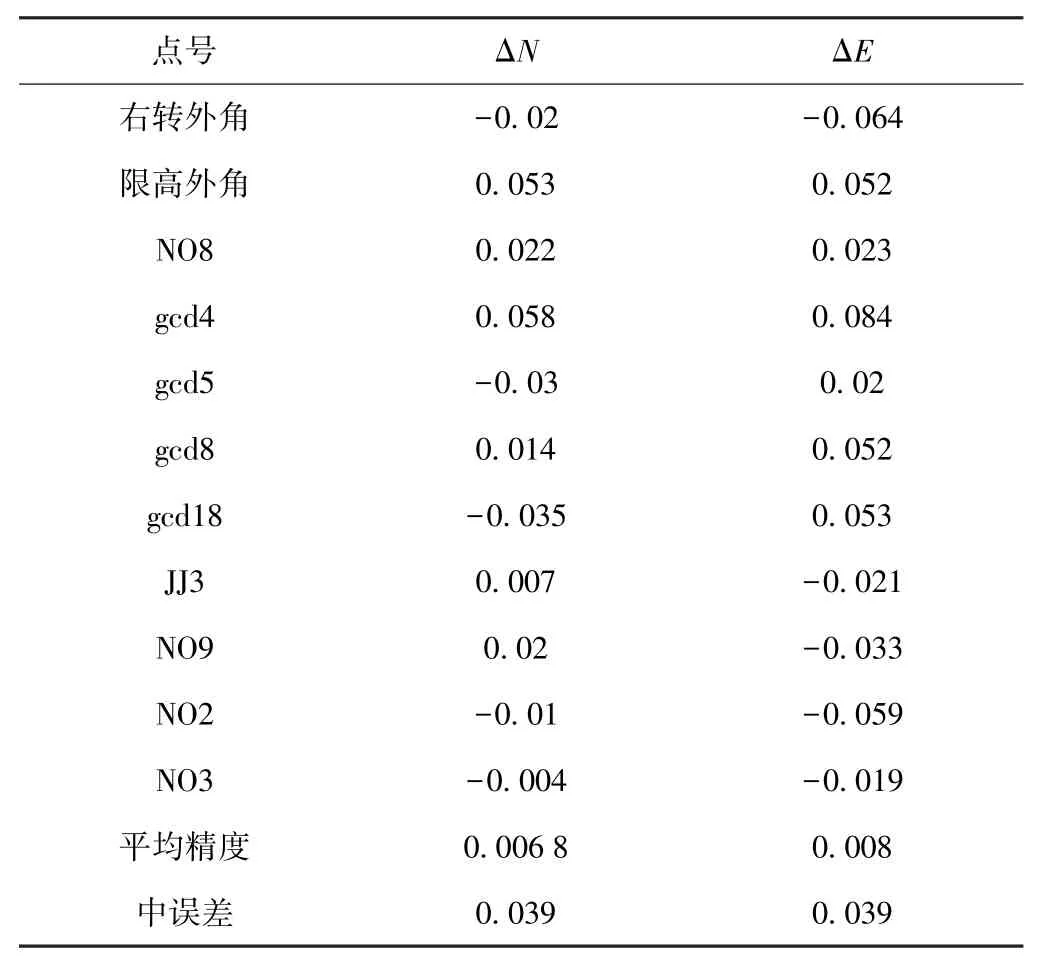
表4 激光點云平面精度分析cm
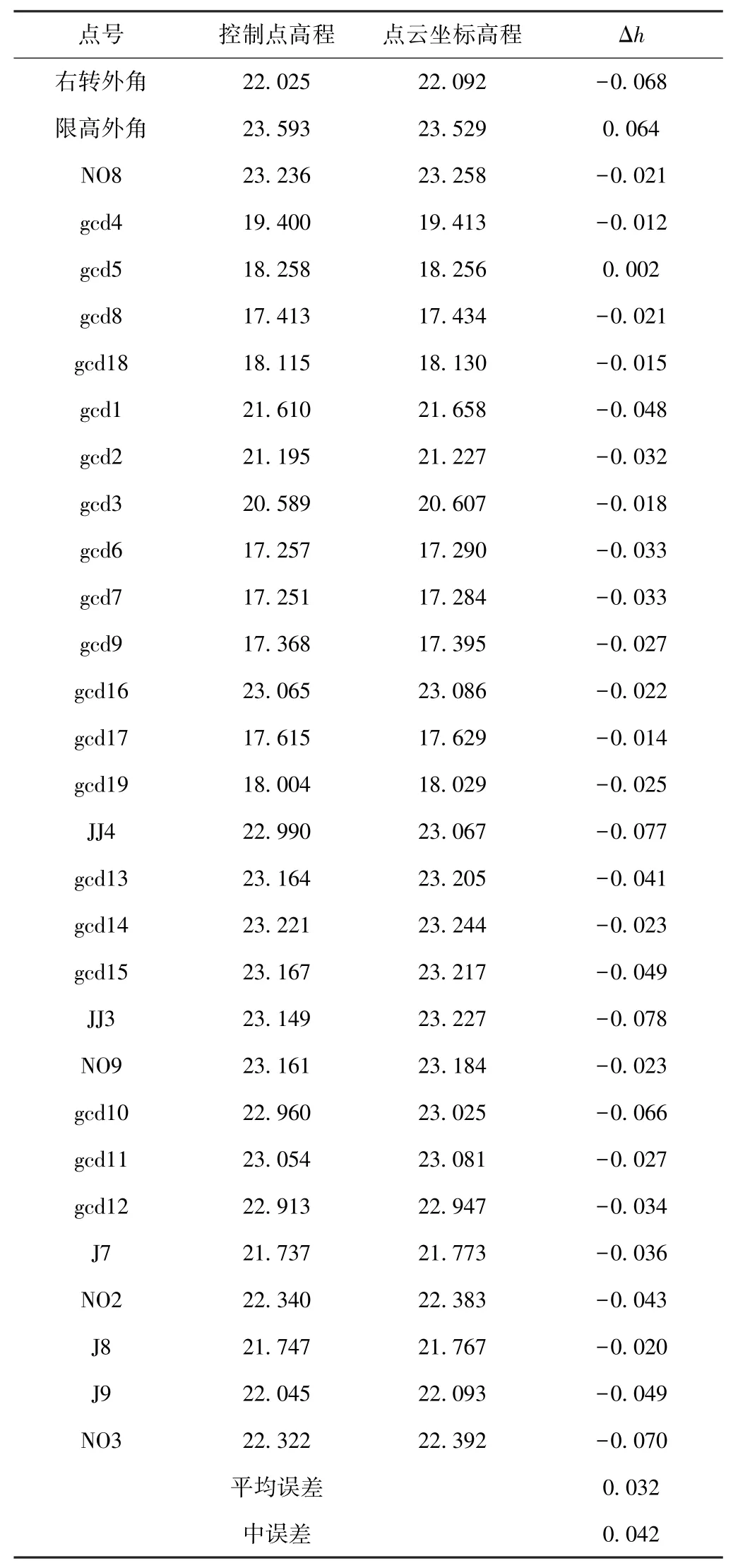
表5 激光點云高程精度分析cm
由表4、表5 可知,表中計算所得的中誤差值均滿足規范精度要求。
6 結語
(1)將“空地水”一體化測繪所采集的Lidar 數據、多波束數據,以及收集到的電子航道圖、整治工程的線劃圖等數據,依據統一的數據標準進行處理融合及加工處理,有利于數據融合展示與分析。
(2)多源數據不同于傳統的4D 產品,傳統的數據量一般在百兆級別,而多源數據一般的幾百GB 甚至TB 級別。 海量數據的存儲、管理、調用等是系統平臺運轉的關鍵。
(3)針對長江航道及兩岸的整體地形狀況,通過多種測繪技術手段的有機結合,從數據采集到數據處理的各環節,將激光雷達系統、多波束測深系統等處理軟件整合集成引入航道一體化協同測繪平臺上,構建“空地水”一體化的航道測繪和動態監測體系,形成了一套適用于長江航道的多工作平臺多設備協同一體化測量作業流程及作業規范。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
家庭影院技術(2017年9期)2017-09-26 03:41:45