視覺自動化監測技術在鐵路變形監測中的應用
2023-10-14 05:41:26楊軍杰張立偉
鐵道勘察 2023年5期
楊軍杰 魏 來 張立偉
(中國鐵路設計集團有限公司,天津 300251)
引言
近年來,鄰近既有鐵路施工的建設項目越來越多,如鄰近鐵路的新建鐵路、公路、石油管道下穿運營鐵路以及鐵路沿線新建住宅、市政工程等。 這些工程施工往往會影響鐵路路基、橋涵、車站等的穩定[1],給鐵路運營安全帶來一定的風險。 因此,對鄰近營業線的鐵路結構物進行變形監測,是確保鐵路行車安全的重要手段。
相關部門對營業線鐵路監測精度和頻次給出了明確要求:第三方變形監測須采用自動化實時監測技術,監測頻次原則上不少于1 次/2 h,發生沉降數據超預警值后應加密監測,至少2 次/h。 高速鐵路路基、橋梁墩臺頂橫向、縱向水平位移、豎向位移有砟軌道不大于3 mm,無砟軌道不大于2 mm[2]。
利用全站儀進行人工測量的方法無法滿足營業線鐵路變形監測的頻次和精度要求。 為了克服傳統變形測量手段的缺點,以近景攝影測量學為基礎的非接觸測量方法在安全監測領域開始受到關注。 近景攝影測量是一種涵蓋攝影測量學、計算機視覺、光學測量、數字圖像處理分析等學科交叉融合形成的新興交叉學科,能夠對各種運動、變化過程參數進行測量,具有精度高、自動化、非接觸、動態測量、實時測量、易于實施等特點[3-4]。 近年來,近景攝影測量技術在基坑監測、橋梁變形監測中得到了廣泛應用[5-9],并取得了一定的成果。 孟麗媛提出了一種利用相關系數對傳統相機檢校進行改進的方法,將所得結論用于合肥軌道交通二號線天柱路站基坑變形監測中,證明了近景攝影測量技術用到基坑變形監測中的可行性[10];張家煒使用工業非量測相機,在Visual Studio 2019 開發平臺中設計并運行模板匹配算法和特征點匹配算法,將近景攝影測量技術與計算機視覺算法結合,開發出非接觸式自動化基坑變形監測系統,可以自動化、高精度、大面積采集基坑變形數據并計算分析基坑變形情況[11]。
為解決營業線鐵路變形監測高頻次、高精度、實時預警的要求,研究開發了一套“視覺多點鐵路營業線自動化變形監測系統”,通過優化原理算法、模塊化集成、遠程控制、鏡頭濾波改進、基于云平臺的數據管理系統開發等研究,以期實現遠程自動化實時監測預警和高精度監測。
1 視覺自動化監測系統架構
視覺多點自動化監測系統由監測方案設計模塊、硬件集成模塊、數據處理模塊和預警發布模塊組成,其中監測系統硬件部分由視頻多點分段采集相機、校正基準點、靶點、控制器和電源組成,軟件部分以圖像處理技術為核心,實現誤差修正和像素測量。 視覺多點自動化監測系統整體架構見圖1。
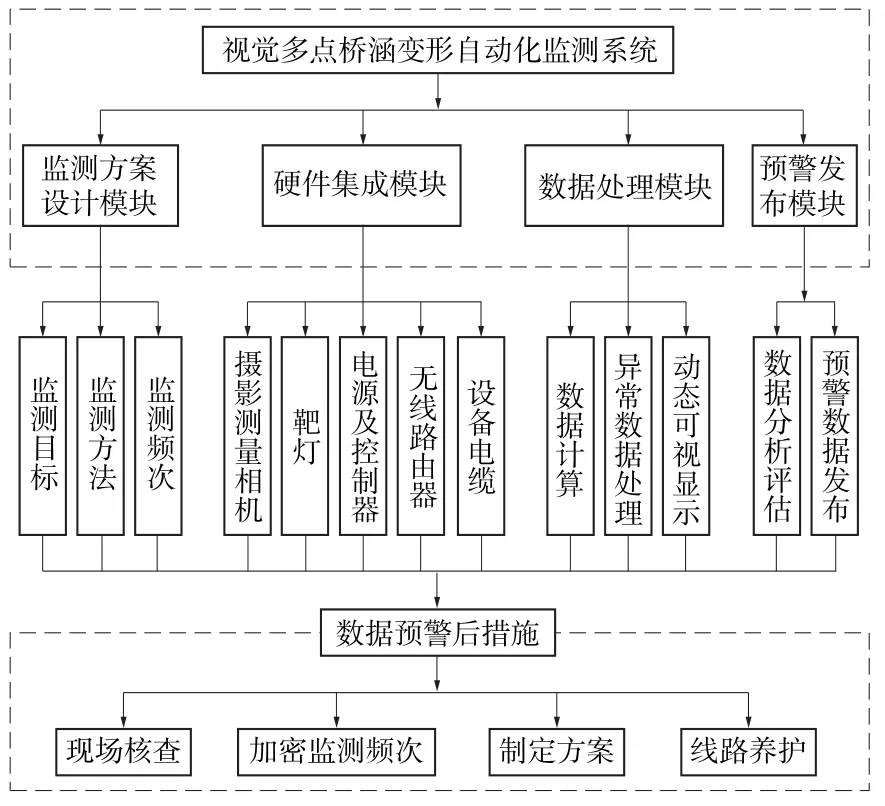
圖1 視覺多點變形自動化監測系統整體架構
2 視覺多點變形監測原理和算法
2.1 視覺多點變形監測原理
視覺監測設備的基本原理:在被監測物測試點上安裝1 個能夠發射紅外線的靶燈,通過光學系統把標識點成像在CCD 的接收面上,當路基產生形變時,測試靶燈也跟著發生形變,通過測出靶上標識點在CCD接收面上圖像位置的變化值,結合被測物體與其在圖像成像點之間的變換關系,便可以得到形變值。 利用高精度亞像素定位算法,使得視覺多點可分段式監測設備的形變檢測分辨率突破了其CCD 器件像元的寬度大小的限制,具備極高形變監測精度[12-15]。
高清鏡頭CCD 可以對靶標上的多個特殊像素點進行智能識別和實時位置追蹤,實現對靶標x、y軸向的二維位移自動化監測。 該設備具有動態響應好、自動化程度高、測量誤差小等優點。
在獲得基準數據以及后續測量數據后,刪除由列車經過時擾動引起的異常數據可修正;采用低通濾波進行噪聲濾除;采用基準點數據復原由儀器可能出現的姿態變化引入的誤差;最終通過基于高精度亞像素定位算法計算出監測期間目標構筑物變形。
2.2 高精度亞像素算法
以初始采集的圖像為參考圖像,在參考圖像中取以圖像目標點(x0,y0)為中心的矩形區作為參考圖像子區;變形后的圖像為目標圖像,假設參考圖像子區中的各點(x,y)與變形后的目標圖像子區中各點(x′,y′)的函數關系為
式中,u,v分別為參考圖像子區中心在x,y方向的位移;(Δx,Δy)為點(x,y)到參考圖像子區中心(x0,y0)的距離;ux,uy,vx,vy分別為目標圖像子區的位移梯度。 變形前后各參數關系見圖2。
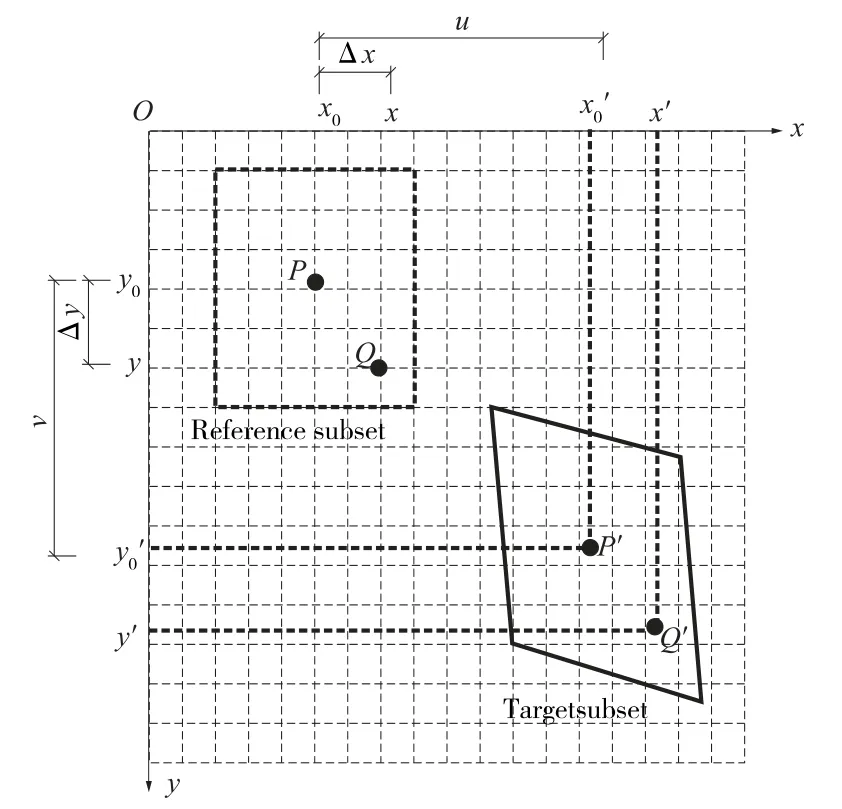
圖2 變形前后各參數關系
預定義相關函數為Cf,g(p),其中,p=(u,ux,uy,v,vx,vy)T,令相關函數Cf,g(p)的梯度為0,從而計算出待求的變形參數矢量p,進而計算出u和v的值。
設圖像子區大小為(2M+1)×(2M+1),其中M為局部位移場中各數據點的局部坐標,則相關函數為
式中,f(x,y)為參考圖像子區的灰度函數;g(x′,y′)為目標圖像子區的灰度函數;fm為參考圖像子區的灰度平均值;gm為目標圖像子區的灰度平均值。
對相關函數的一階偏導數采用Newton-Raphson亞像素插值迭代法進行優化求解,以整像素位移搜索結果為迭代初值,求解變形前后圖像子區灰度相似度最高時變形參數矢量p,此時相關函數有最小值,且其一階偏導數為0。
由于數字圖像記錄的是離散的灰度信息,在利用相關函數進行搜索時,窗口的平移只能以整像素為單位,因此獲得的位移只能是像素的整數倍。 但是實際上,位移值一般不會恰好為整像素,尤其當測量距離較遠時,結果常常為幾分之一甚至幾百分之一像素。 由于變形初值估計只能獲得粗解,為提高數字圖像相關方法的測量精度,采用Newton-Raphson 方法進行亞像素位移測量,該方法不僅考慮參考圖像子區中心位置的變化,而且考慮參考圖像子區形狀的變化(正應變、剪應變、轉動及其組合),更符合實際的變形情況。
3 監測數據精度
3.1 理論精度
理論精度為測量環境條件在絕對完美的情況下計算出來的精度,即無外界光照條件影響,測量過程中相機未發生任何姿態變動,此時,相機測量的精度στ與鏡頭焦距f(100 mm)、待測目標到鏡頭的距離S、像元尺寸I(7.4 μm)、亞像素算法精度(0.01 像素)有關,整體關系為
代入各項參數,可得連續測量的理論精度(見表1)。
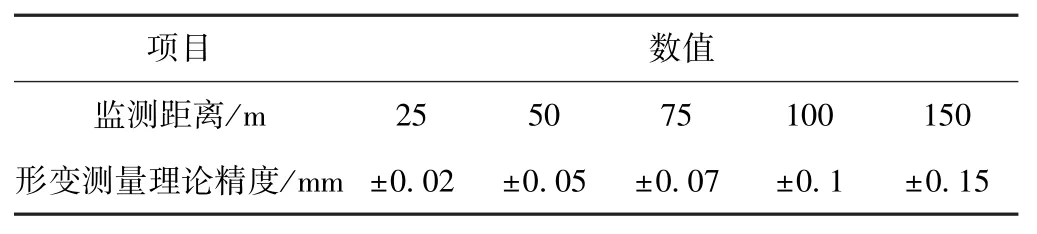
表1 連續測量理論精度
3.2 實際精度
受環境光照變化、姿態變化、人為干擾等諸多因素的干擾,測量誤差具有統計隨機性。 除了設備中硬件系統誤差外,測量誤差主要還包括環境光照變化引入的誤差σal、相機姿態變化引入誤差σpc、人為干擾引入的誤差。
其中,σal為實際測量過程中,兩次測量時環境光照強度、方向不同以及監測目標的變形造成目標和成像系統間距變化所引起的投影誤差等,從而導致靶點在成像平面上的特征發生變化引入的誤差。 采用在鏡頭端添加850 nm 的濾波片、在待測物體端采用紅外靶燈的方法可以大幅度降低環境光照差異、鏡頭畸變帶來的誤差。σpc為實際測量過程中由于鏡頭姿態發生變化、兩次測量中設備位置整體發生變化引入的測量誤差,通過在現場布設位置不動的基準點可以降低此項誤差影響。
通過被測點的中誤差可以統計出實際測量的精度,以N組變形監測實驗獲得數據為例,精度計算公式為
式中,σf為變形監測實際沉降或形變測量精度;X為目標點實際形變的數據,xi為第i組測量的結果(i=1,2,…,N)。 通過大規模實際測量,得出點位復原實際測量精度(連續形變監測),點位復原實際精度見表2。
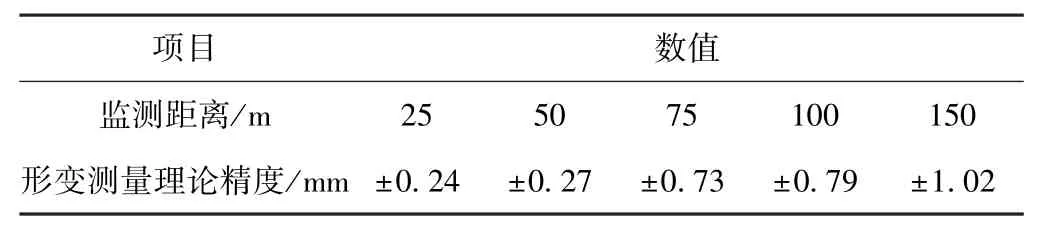
表2 點位復原實際精度
4 系統應用
4.1 工程概況
某新建鐵路引入既有高鐵車站,其中6 處橋涵需要接長,鄰近營業線范圍內施工內容主要包括新建橋涵的基坑開挖、鉆孔灌注樁、承臺、主體底板、橋身及頂板施工、附屬工程等;既有鐵路為運營高速鐵路,每天通過動車組20 余對,施工過程中已造成了橋涵開裂變形,安全風險很大,而采用傳統的人工監測方法不具備實時監測預警和作業時間空間要求,因此采用視覺自動化監測技術勢在必行。
4.2 監測內容和方法
采用在施工側既有橋涵頂部及兩側路基上交叉埋設視覺多點觀測靶點,通過近景攝影測量的方法自動監測施工過程中6 座橋涵的水平位移和豎向不均勻沉降。 基于BIM+GIS 技術建立運營高鐵重點地段監測變形系統[16-20],視覺自動化監測系統云平臺見圖3。監測結果與建設、設計、施工單位實時共享,用于指導涵洞接長、站房改造施工,優化設計和施工工序,保障新建鐵路施工順利進行。
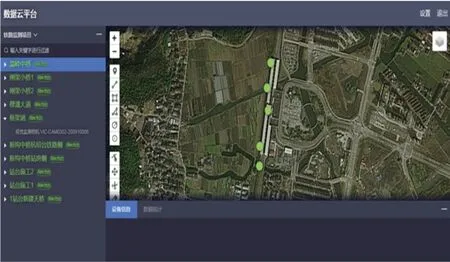
圖3 視覺自動化監測系統云平臺
4.3 監測方案
(1)涵洞監測靶點設置
按橋涵1 跨1 個點涵頂中間布點,兩側過渡段各加1 個點的原則布設,總計布設監測靶燈37 個,監測靶點結構示意見圖4。
(2) 基準靶點設置
每個監測對象設置2 個基準靶點,6 座涵洞共設置14 個基準靶點;基準靶點設置在遠離變形體的接觸網柱上。
(3)采集儀設置
視覺多點分段采集儀(見圖5)固定在遠離橋涵一定距離的相對穩定的接觸網柱上,高度為1.2~1.8 m。

圖5 圖像采集傳輸系統
4.4 監測數據分析
以K490+260 框架涵為例,該涵洞自2020 年9 月底開始施工,至12 月中旬主體結構施工基本完成,共設置5 個視覺自動化監測靶點(QH23、QH24、QH25、QH26、QH27),每天監測12 次,監測數據曲線見圖6、圖7。

圖6 K490+260 框架涵累積水平位移曲線
從圖6 可知,QH26 點(K490+275.44)變形最大,從2020 年11 月13 日至2021 年1 月3 日,變形一直處于增大狀態,最大水平位移2.94 mm,監測期間其余監測點水平位移都在2 mm 以內,整體來看該橋涵水平位移變化不大,監測數據比較穩定。
由圖7 可知,監測期間該框架涵所有監測點累積垂直位移都在2 mm 以內,曲線雖然呈波浪狀,但是變化值很小,說明監測期間涵洞沉降變形較小。
為了檢驗視覺自動化監測方法的效果,另設置1 個棱鏡監測點(里程K490+251.21),使用全站儀每天人工觀測1 次,將2020 年12 月人工觀測數據與視覺自動化監測數據進行對比,結果見圖8。
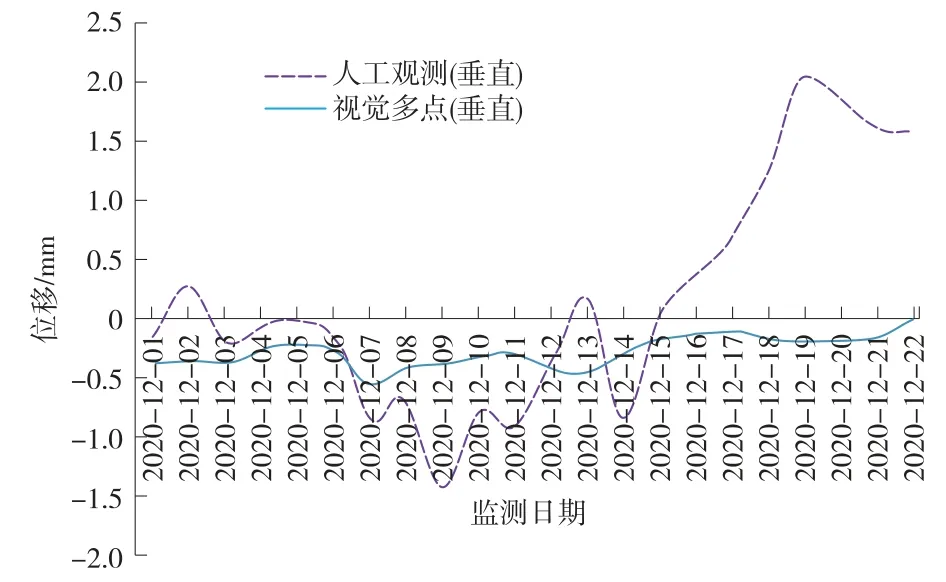
圖8 視覺自動化監測與人工監測對比
由圖8 可知,兩種監測方法結果基本一致,沉降變形基本在1 mm 以內。 僅12 月15 日至22 日差別較大,原因是該段時間主要天氣為降雨和大霧,影響人工監測數據精度。 整體來看人工監測方法數據波動較大,而視覺自動化監測方法數據波動小、受外界干擾小、誤差小。
5 結論
研究了基于近景攝影測量技術的視覺多點位移監測系統在營業線高速鐵路結構物變形監測中的應用,表明視覺多點位移監測系統具有精度高、自動化、非接觸、實時測量、干擾因素少等特點,具體結論如下。
(1)研究開發的視覺多點自動化監測系統,融合近景攝影測量技術、計算機視覺、BIM 技術、GIS 技術、遠程控制、無線通信等多種先進技術,實現了營業線橋涵結構物變形遠程自動化實時監測預警。
(2)與傳統人工監測方法相比,該系統無需上線作業,不受天窗時間限制,可以實現實時監測,監測數據不易受干擾,數據穩定。
(3)采用850 nm 的濾波片可大幅度降低環境光照差異帶來的誤差,通過設置基準點可將設備位置變化引起的誤差控制在1 mm 以內。
(4)靶燈成像受天氣影響較大,尤其在降雨、大霧、霜露等天氣條件下獲得的靶燈圖像模糊,數據解算和精度受影響較大。
猜你喜歡
建材發展導向(2021年16期)2021-10-12 05:39:52
中華詩詞(2020年1期)2020-09-21 09:24:52
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:42
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公路(2017年14期)2017-09-26 11:51:52
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36