
SAR距離卷積方位乘積調制場景欺騙干擾方法
2023-10-17 04:01:20紀朋徽邢世其代大海龐礴馮德軍
航空學報 2023年18期
關鍵詞:方法
紀朋徽,邢世其,代大海,龐礴,馮德軍
國防科技大學 電子科學學院,長沙 410073
合成孔 徑雷 達(Synthetic Aperture Radar,SAR)是一種微波成像設備,相比光學成像具有全天時、全天候和遠距離高分辨的優勢,廣泛應用于偵察監視、引導打擊、毀傷評估等軍事領域,對我方的高價值軍事目標防護構成巨大威脅[1-2]。因此,研究有效的SAR干擾技術具有重要理論意義和應用價值。
一般來說,針對SAR的有源干擾技術可分為壓制干擾和欺騙干擾兩種[3-7]。其中,壓制干擾發射大功率干擾信號以覆蓋回波信號,成像后可在SAR圖像上生成大面積遮蔽區域,影響目標檢測和識別,干擾方式實現簡單,但對功率要求高,并且存在因實施干擾容易暴露重點區域的風險。而欺騙干擾,通過高逼真的模擬回波信號,能在敵方無法感知的情況下實現對SAR的欺騙,并且對功率要求低,有利于干擾機小型化,因此,越來越成為研究重點。
當前,針對SAR的欺騙干擾研究以場景欺騙干擾為主。文獻[8]最早指出對SAR的場景欺騙干擾可以視為干擾機截獲信號與干擾機單位脈沖響應函數的卷積。由于時域卷積計算復雜,所以干擾機生成場景欺騙干擾一般通過對截獲信號進行快速傅里葉變換(Fast Fourier Transform, FFT)并與干擾機頻率響應函數直接相乘,然后逆快速傅里葉變換(Inverse Fast Fourier Transform, IFFT)生成干擾信號。因此,對SAR的場景欺騙干擾,其主要過程就是構建干擾機頻率響應函數。然而,當欺騙場景內的散射點增多時,計算頻率響應函數會非常耗時,導致干擾機難以實時做出快速響應。因此,后續對SAR場景欺騙干擾的研究以降低干擾機頻率響應函數的運算量為主,其基本思想就是把干擾機頻率響應函數的一部分運算量放在離線階段執行,以降低實時調制運算量。在具體的實現架構上,利用干擾機頻域響應函數實現時域卷積調制的干擾方法可分為2類,即一維卷積調制型干擾方法和二維卷積調制型干擾方法。其中一維卷積調制干擾方法計算干擾機頻率響應函數時根據實時偵察得到的SAR運動參數在每個慢時刻單獨計算;而二維卷積調制干擾方法,則在干擾前就把所有慢時刻的干擾機頻率響應函數都計算出來,因此,需要已知SAR的全部工作參數。
具體來說一維卷積調制干擾方法主要包括模板分割方法[9-11]和遞歸方法[12-13]。其中,模板分割方法通過對SAR傳感器到目標點斜距的近似,把每一慢時刻的干擾機頻率響應函數分為慢時間相關和非相關兩部分,并通過離線計算慢時間非相關部分有效降低干擾機實時調制運算量;但因在實時調制階段需要大量求和,計算量依然很高,雖然能夠通過模板分割進行多干擾機平行計算進一步降低運算量,但無疑又進一步增加了干擾系統的復雜度,經典的模板分割方法為文獻[10]介紹的兩步生成方法。遞歸方法則把干擾機頻率響應函數建模為慢時間的遞歸函數,設定初始值后,只需進行回歸計算即可由上一慢時刻的干擾機頻率響應函數通過遞歸計算出當前慢時刻的干擾機頻率響應函數,從而實現場景欺騙干擾信號的快速生成。以上2種一維卷積調制干擾方法,其干擾機頻域響應函數均是每個慢時刻單獨計算,雖然都有效降低了計算量,但下一慢時刻的頻域響應函數仍需要重新計算,因此,計算量依然很高。
二維卷積調制干擾方法則主要包括頻域三階段方法[14]和逆ωk干擾方法[15]。這2種方法都是通過離線和預調制階段的處理,對模板的二維傅里葉變換進行插值以計算出所有慢時刻的干擾機頻域響應函數。其不同點在于對SAR傳感器到目標點斜距的近似,其中逆ωk干擾方法未采取任何近似,而頻域三階段方法只在近似時忽略了殘余距離耦合。因此,2種方法生成的虛假場景逼真度高,并且實時計算量低,但因其預處理階段需要知道所有SAR工作參數,如果事先無法準確偵察得到SAR工作參數,則預調制階段的運算量將只能在實時階段執行,而預處理階段需要對模板進行插值計算將非常耗時,因此,二維卷積干擾方法實用性不強。
不同于以上介紹的卷積類干擾方法,文獻[16]介紹了一種SAR二維乘積調制干擾方法,該方法利用線性調頻信號的時頻耦合特性通過時域乘積調制直接生成干擾信號,由于不像卷積型干擾方法需要轉到頻域調制再轉到時域生成干擾信號,因此,計算效率相比卷積類方法高。雖然文獻[16]中介紹的方法能夠大大提高虛假目標生成的效率,但其實現過程均在實時調制階段進行,并未通過離線計算分擔部分計算量,因此,其計算效率不高。在此基礎上,文獻[17]對SAR二維乘積調制干擾方法進行改進,提出了對逆合成孔徑雷達(Inverse Synthetic Aperture Radar, ISAR)的二維乘積調制干擾方法,其首先通過離線計算得到一系列方位慢時間域乘積調制函數,然后根據偵察參數對方位向重采樣即可得到與實際ISAR工作參數對應的慢時間乘積調制函數,并與截獲信號相乘即可迅速生成虛假場景干擾信號。由于重采樣過程可以根據對ISAR實時偵察快速實現,并且干擾調制可以直接通過時域相乘完成,大大提高了對ISAR調制干擾的實時性。但由于ISAR與SAR方位向信號形式不同,對ISAR的二維乘積調制干擾方法并不能直接用來對抗SAR。并且由于乘積調制干擾本質上是距離方位兩維移頻調制,所以適用的虛假場景范圍小,當移頻量較大時目標失真嚴重,同時也無法干擾具有低多普勒容限的復雜波形體制SAR[18]。
基于以上的分析,本文首先根據ISAR二維乘積調制干擾方法的思想,給出適合SAR方位向乘積調制干擾的快速實現方法;然后通過對SAR傳感器到目標點斜距的合理近似,使SAR方位乘積調制干擾能夠與SAR距離卷積調制干擾結合用于對SAR的干擾,在此基礎上提出一種基于距離卷積方位乘積調制的場景欺騙干擾方法。該方法能夠有效簡化干擾機頻率響應函數,以欺騙模板的二維傅里葉變換為基礎,在干擾前不需要知道SAR工作參數即可構建一系列慢時間域干擾機頻率響應函數,并通過方位向實時重采樣的方式得到與SAR工作參數相對應的慢時間干擾機頻率響應函數,在降低偵察參數需求的基礎上也能大幅降低計算量。該方法雖然也可歸為卷積型干擾方法,但因其不需要知道任何SAR參數即可離線計算出所有慢時間域的頻域響應函數,因此,相比現有卷積類場景欺騙干擾方法,在方位向損失了部分精度的同時,大幅降低了實時計算量和偵察參數需求;相比乘積型場景欺騙干擾方法,在距離向提高了虛假目標生成精度并擴大了干擾范圍,且能夠適應具有低多普勒容限的復雜波形體制的SAR(如隨機頻率編碼體制、相位編碼體制),具有重要的工程應用價值。
本文方法預計可以用于中低分辨率的SAR欺騙干擾中,此時SAR成像場景范圍相對較大,且精度不高,采用本文方法生成的虛假場景既能生成相對大的場景,而且能夠保持一定精度,難以被識別為干擾,從而能達到干擾效果;另一方面,本文方法在現有的卷積類SAR干擾方法中計算量是最低的,可以進行工程實現,并且相比更低計算量的兩維乘積調制干擾還可以用來對抗復雜波形類的新體制SAR系統。
1 SAR方位向乘積調制干擾快速實現方法
引言中提到文獻[17]中介紹了一種ISAR乘積調制干擾的高效實現方法,該方法主要基于線性調頻信號的時頻耦合性,利用欺騙模板的二維傅里葉變換與移頻調制的關聯性,通過對傅里葉變換后的模板進行重采樣得到干擾調制信號,并與截獲的ISAR信號相乘快速實現對ISAR的二維乘積調制干擾。但由于ISAR的方位向信號形式與SAR不同,針對ISAR的二維乘積調制干擾方法中的方位向調制干擾不能直接應用到SAR干擾中。為此,下面首先介紹線性調頻信號的時頻耦合性,然后按照ISAR乘積調制干擾方法的思想推導出適合SAR方位向乘積調制干擾快速實現方法。
1.1 線性調頻信號的時頻耦合性
假設線性調頻信號的帶寬為B,對應的時寬為T,調頻斜率,則延遲為t0的線性調頻信號可以寫為
經脈沖壓縮后可以得到峰值出現的位置為t=t0。
假設對該線性調頻信號做頻率為fd的移頻處理,則移頻后的信號sd(t)可以寫為
根據文獻[19]可知,當線性調頻信號存在頻率失配時,脈沖壓縮峰值會發生偏移,此時對應的峰值位置為相應的偏移量Δt滿足
因此,對于線性調頻信號可以通過移頻操作改變脈沖壓縮后的峰值,相當于對信號進行時延導致對應目標的位置發生了改變。
1.2 SAR方位向乘積調制干擾方法
考慮一個1×Pa的欺騙模板,其中1為距離向點數,Pa為方位向點數,模板間距為Δux,假設第一個點的位置距干擾機的方位位置為ux0,則其它各個點距干擾機的方位位置分別為uxp=ux0+(p-1)Δux,p≤Pa。考慮到SAR的方位向信號可以看成線性調頻信號,因此,如果要生成uxp位置處的虛假目標,根據1.1節的時頻耦合關系,則方位向對應的移頻fap應滿足
式 中:μa=-,為方位向調頻斜率;Va為SAR平臺運行速度;λ為發射信號波長;rJ為干擾機到SAR平臺運動航跡的最短斜距。相應地,對應的移頻調制相位為
式中:ta為方位向慢時間。假設在一個合成孔徑時間Ta內采樣點數為N,且滿足把式(4)代入式(5)可得
式中:x=Vata表示SAR平臺的方位向實時位置。令,則式(6)可以進一步寫為
式中:ka表示SAR回波信號方位向空間頻率。由于ta在一個合成孔徑長度Ta內采樣點數為N,因此,ka與SAR回波方位向帶寬Ba=|μaTa|的關系滿足
另外,如果對1×Pa的模板方位向末尾補零至M變為新序列,然后進行FFT,則有
根據傅里葉變換的性質,可知其變換后的空間頻率k′a滿足
對于式(9),當p≤Pa時,σp=0,因此,式(9)可進一步寫為
對比式(7)和式(11)可以發現,移頻調制與欺騙模板補零傅里葉變換的結果在形式上是一致的,兩者的不同僅僅是ka和k′a具體表達式的不同。因此,可以從模板的補零FFT結果中采樣得到方位向移頻調制信號,只需滿足Δux<ρa,且傅里葉變換點數足夠多,以使k′a重采樣能夠得到ka。由k′a和ka的關系可知,重采樣對應的間隔ηa滿足
以上就是SAR方位向乘積調制干擾快速實現方法,其只需要對欺騙模板的方位向進行補零傅里葉變換并通過重采樣就可實現欺騙模板的方位向乘積調制。由式(12)可知,在重采樣階段需要知道SAR系統的方位分辨率ρa,對應的需要知道SAR平臺的運行速度Va,距離SAR航跡最近位置rJ和波長λ等工作參數,這些SAR工作參數可以通過偵察接收機實時偵察得到。對于距離向點數為Pr的Pr×Pa二維干擾模板,借鑒ISAR乘積調制干擾方法中的距離向乘積調制干擾即可實現SAR二維乘積調制干擾,此處不再具體闡述。論文后面對SAR在距離向和方位向同時使用乘積調制干擾的方法,稱作SAR二維乘積調制干擾方法。
2 SAR距離卷積方位乘積調制干擾方法
2.1 SAR距離卷積調制干擾模型
圖1為干擾場景示意圖,SAR沿方位向以速度Va飛行,忽略飛行高度,以斜距表示距離向。干擾機在成像場景中的坐標為(xJ,rJ),欺騙場景中心坐標為(xs,rs),欺騙模板UV內一虛假點目標p在欺騙場景中的坐標為(urp,uxp)。用x表示SAR平臺的實時方位坐標,Rp(x)表示點目標p到SAR的實時距離,RJ(x)表示干擾機到SAR的實時距離,則Rp(x)和RJ(x)可分別表示為
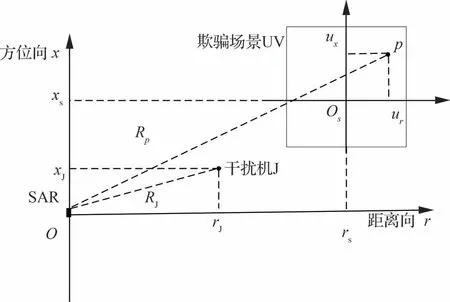
圖1 SAR場景欺騙干擾幾何圖Fig.1 Geometry of scene deceptive jamming against SAR
進一步對Rp(x)和RJ(x)進行泰勒展開,可分別近似為
假設干擾機的坐標與欺騙場景中心一致,即xJ=xs,rJ=rs,則干擾機和點目標到SAR平臺的距離差可以近似為
假設SAR發射信號以距離形式表示為st(r,x),則干擾機截獲的SAR發射基帶信號sc(r,x)可表示為
式中:?表示沿距離向卷積調制。為了生成虛假目標p,干擾機需要對截獲的信號進行時間延遲和相位調制,假設調制后的信號表示為sm(r,x)[20],則
式中:σp為虛假目標p對應的散射系數,k0為空間距離載頻,滿足,其中c表示光速,f0為發射信號載頻。令
則一般稱hp(r,x)為干擾機時域響應函數。由于在時域進行實時時間延遲難以實現,因此,干擾機通常在距離向頻域通過與干擾機頻域響應函數相乘實現干擾調制。對式(20)進行傅里葉變換可得干擾機頻域響應函數為
式中:kr為空間距離頻率,滿足kr=,其中fr為快時間頻率。
當干擾機生成欺騙模板UV區域內的所有虛假目標時,根據疊加原理,可得此時干擾機頻域響應函數為式(21)對模板內所欺騙散射點的積分,即
式中:σ(ur,ux)表示坐標(ur,ux)處虛假點目標散射系數;ΔR(x)為干擾機和坐標(ur,ux)處虛假點目標到SAR平臺的距離差,滿足
引言中介紹的兩階段方法、頻域三階段方法等都是通過求解式(22)并通過頻域相乘實現欺騙場景干擾的調制,他們的不同點在于對ΔR(x)采取了不同的近似。因為采取不同的近似,也使得各方法有著不同的計算復雜性。但因為始終存在距離頻率和欺騙點目標方位的耦合,一方面提高了對偵察參數的需求,另一方面計算量效率均不高,難以應用到實際干擾對抗中。為此,下面將對ΔR(x)采用一種新的近似,該近似忽略了距離頻率和假目標方位的耦合,使干擾機方位向調制和距離向調制可以獨立實現,也使得方位向乘積調制和距離向卷積調制能同時應用到對SAR的場景欺騙干擾中。
2.2 SAR距離卷積方位乘積調制干擾模型
把式(23)代入式(22),可得干擾機頻率響應函數為式(24)。
式中:第1、第2個指數項不隨SAR平臺的方位位置發生改變,只會影響虛假目標的距離向位置,且第二個指數項為距離頻率和假目標方位的耦合項;考慮到相比ur對距離向假目標的位置影響較小,因此,第2個指數項可以忽略。該忽略項對虛假目標產生的影響會在3.1節進行具體的分析。第3個指數項隨SAR平臺的方位位置一直在變化,因此,會影響虛假目標的方位位置,在SAR分辨率不高的情況下,由于f0遠遠大于SAR發射信號帶寬Br,所以相應的第3個指數項可以近似表示為第3個指數項進一步可以寫為因此,式(24)可以進一步近似為式(25)。經過以上兩步近似,在式(25)中不再存在距離頻率和假目標方位的耦合項。
此時,相當于對式(23)做了進一步近似,即
式(25)中,關于dur的積分項相當于對模板沿距離向進行傅里葉變換,關于dux的積分項與乘積調制干擾中的式(6)表示的方位向移頻調制是一致的,只是式(6)寫成了求和形式。
經過對SAR方位向乘積調制干擾快速實現方法的介紹可知,方位向的移頻能通過對模板的傅里葉變換重采樣得到。因此,式(25)中的關于dux的積分項能通過對模板方位向進行FFT得到。而關于dur的積分項也能通過對模板距離向進行FFT得到。因此,式(25)表示的干擾機頻域響應函數H(kr,x)可以通過模板的二維傅里葉變換式(27)進行方位重采樣得到。
式中:kr0和ka0表示圖像的分辨率對應的空間頻率,FT2{·}表示二維傅里葉變換。
由于干擾圖像模板與實際SAR信號對應的采樣頻率不同。因此,需要對傅里葉變換的模板Hσ(kr0,ka0)進行距離向插值得到與干擾機空間采樣頻率kr對應的模板(kr,ka0)。一般情況下該過程可以采用sinc插值實現。但考慮到sinc插值過程較為耗時,在本方法中不加以使用。考慮kr與kr0之間滿足線性對應的關系,因此,可以使用一般離散傅里葉變換形式即線性調頻Z變換(Chirp-Z Transform,CZT)直接對模板距離向變換得到[21]。即有
式中:CZTr表示沿距離向進行CZT變換,FFTa表示沿方位向進行FFT變換。
得到(kr,ka0)后,根據偵察接收機實時偵察的SAR工作參數即可按照第1節介紹的方位乘積調制干擾方法進行方位向重采樣得到干擾機頻率響應函數H(kr,x)。以上過程就是距離卷積方位乘積調制干擾方法的基本理論,其實現流程如圖2所示,可分為兩個階段:

圖2 距離卷積方位乘積干擾方法流程圖Fig.2 Flowchart of jamming method based on range convolution and azimuth multiplication modulation
第一是離線階段,即由式(28)計算得到干擾機二維頻率響應函數(kr,ka0)。此階段只需知道干擾機對應的采樣頻率即可,而干擾機的采樣頻率對干擾方來講是確定的,因此,不需要知道任何SAR工作參數。
第二是實時調制階段,即首先根據實時偵察SAR工作參數對距離向空間頻率插值后的欺騙模板(kr,ka0)進行方位向重采樣得到對應每一方位位置的干擾機頻率響應函數H(kr,x),然后與干擾機截獲的SAR干擾信號在頻域相乘并進行IFFT得到干擾信號。此階段由于要進行方位重采樣,根據式(12)可知需要知道SAR系統的方位分辨率ρa,也就需要知道SAR平臺的運行速度Va,距離SAR航跡最近位置rJ和波長λ等參數,這些參數對SAR的副瓣進行偵察時就能得到。
3 距離卷積方位乘積調制干擾方法
由于在對式(24)進行近似時忽略了距離向和方位向之間的耦合項,雖然會影響欺騙場景的覆蓋范圍,但降低了計算量和對偵察參數的要求。以下具體分析采取式(26)中的近似對欺騙場景范圍的影響,并分析距離卷積方位乘積調制干擾方法的偵察參數需求和實時計算量。
3.1 欺騙場景范圍
根據文獻[22]的介紹,使用式(26)中的近似導致的殘余距離徙動(Range Cell Migration,RCM)可以寫為
因此,在一個合成孔徑長度La內,殘余距離徙動可以表示為
式中:Ba為方位向帶寬,滿足
把式(31)代入式(30)可得殘余距離徙動為
殘余距離徙動會導致距離向主瓣展寬,為限制距離向主瓣展寬的寬度,應使其小于距離分辨率ρr一定的比例,假設比例系數為ε2,則有
式中:ρr=,Br為發射信號的帶寬。因此,欺騙模板的方位向范圍應滿足
此外,由于在方位向采用的是移頻調制,當移頻量較大時,根據文獻[10]的介紹可知,方位向的主瓣會展寬并出現鬼影,因此,欺騙模板的方位向范圍還應滿足
式中:D為方位向天線孔徑。
另外,由SAR成像的基本理論可知,SAR方位向信號可以近似為線性調頻信號,調頻斜率為,其中R表示場景內的散射點到SAR系統的徑向距離,λ表示波長。對于采用本文所提距離卷積方位乘積調制干擾方法生成欺騙場景,是以干擾機為中心。因此,欺騙場景內各散射點目標對應的真實回波信號方位向調頻斜率應為μa_real=-而按照式(26)中對斜距差的近似,欺騙場景內的各散射點對應的干擾回波信號的方位向調頻率實際為與干擾機所在位置一致,不隨欺騙目標到干擾機的徑向距離發生改變,由此造成的方位向調頻斜率誤差為
相應地,在一個合成孔徑時間Ta內,導致的二次相位誤差(Quadratic Phase Error, QPE)為
該QPE會使虛假目標的方位向主瓣展寬,按照文獻[22]的介紹,當窗函數為凱瑟窗,且β=2.5時,主瓣展寬小于2%、5%、10%時,對應的二次相位誤差要小于0.27π、0.41π、0.55π。為限定方位向主瓣展寬的寬度,二次相位誤差QPE要小于ε1π,其中ε1為方位向聚焦控制系數。即有
從而可求得欺騙模板的距離向范圍應滿足
綜合式(34)、式(35)和式(39)可知,為了滿足一定的逼真度,采用式(26)的近似,距離卷積方位乘積調制干擾在距離向和方位向的范圍應滿足式(40)。
例如,當方位向聚焦控制系數ε1控制在0.5以內,距離向比例系數ε2控制在0.8以內時,按照表2中的仿真參數,其對應的欺騙模板范圍為
3.2 參數偵察需求
論文第3節給出了距離卷積方位乘積的偵察參數需求,其在離線階段不需要任何偵察參數,實時調制階段需要偵察得到SAR平臺的運行速度Va,距離SAR航跡最近位置rJ和波長λ等參數。而根據文獻[10]介紹的一維卷積類干擾方法中的兩步生成方法,在離線階段需要偵察得到距離SAR航跡最近位置rJ和波長λ兩個參數,實時調制階段需要知道SAR平臺的運行速度Va等參數;文獻[14]介紹的二維卷積類干擾方法中的頻域三階段方法需要在離線階段和預處理階段偵察得到關于SAR系統的所有參數;文獻[16]介紹的二維乘積調制干擾方法在離線階段不需要偵察任何參數,但實時調制階段需要知道發射信號的帶寬Br、SAR平臺的運行速度Va,距離SAR航跡最近位置rJ和波長λ等參數。因此,相對卷積類干擾方法和二維乘積調制干擾方法,該文所提方法在離線處理階段所需偵察參數最少。
表1給出了各種欺騙干擾所需的具體參數。以上參數均可通過干擾機自帶的偵察接收系統偵察得到。另外,對于干擾機的發射功率,可以通過偵察當前接收機處的信號功率計算得到;對于干擾機波束指向,由于以上幾種干擾方法均為主瓣干擾,且SAR干擾機本身就有一定的波束寬度,因此,在干擾階段SAR一直處于干擾機波束內,也就不需要調整干擾機的波束指向。
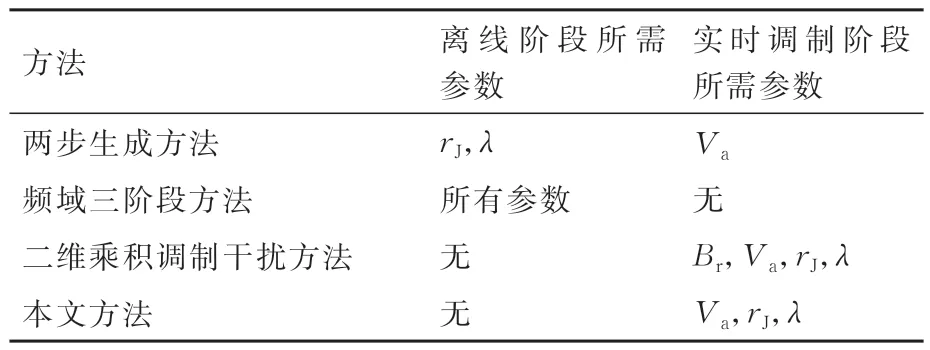
表1 各干擾方法所需參數Table 1 Parameters required by different algorithms
3.3 實時計算復雜度及浮點運算量
假設模板大小為Pr×Pa,補零傅里葉變換后的模板大小為Pr0×Pa0,一個合成孔徑對應的方位慢時間采樣點數為Na,每次距離向快時間采樣點數為Nr。對于本文提出的距離卷積方位乘積調制干擾方法,由于模板是在離線階段構建,所以在對模板進行二維傅里葉變換的計算量并不占用實時運算量。在實時階段的每一個慢時間采樣時刻,只需在頻域把截獲信號和干擾機頻率響應函數相乘并進行逆傅里葉變換得到干擾信號,因此,此階段的計算量包含距離向的FFT和IFFT運算,以及頻域相乘運算。根據文獻[1]第11.5節介紹可知,FFT和IFFT的計算復雜度為O(Nrlog2Nr),對應的浮點運算量分別為5Nrlog2Nr,頻域相乘的計算復雜度為O(Nr),對應的浮點運算量為6Nr。因此,本文方法總計算復雜度為O(Nr)+O(Nrlog2Nr),總浮點運算量為6Nr+10Nrlog2Nr。另外,根據以上的分析計算過程,在無法提前知曉偵察SAR系統偵察參數時,對比給出了一維卷積型干擾方法中模板分割方法中經典的兩步生成方法、二維卷積類干擾方法中的頻域三階段方法[14]和二維乘積調制方法的實時運算量,其中,因為假設無法偵察全部SAR系統參數,所以把頻域三階段方法中的預調制階段的計算量計入實時調制階段。
表2給出了在一次慢時間采樣時刻,4種方法的實時調制計算復雜度和浮點運算量,其中Mker表示插值函數的長度。可以看出:本文提出的距離卷積方位乘積調制干擾方法實時調制計算復雜度和運算量只與距離向采樣點數有關,與欺騙模板大小無關,并且運算量接近二維乘積調制干擾方法,遠遠小于卷積類兩步生成方法和頻域三階段方法的計算復雜度。
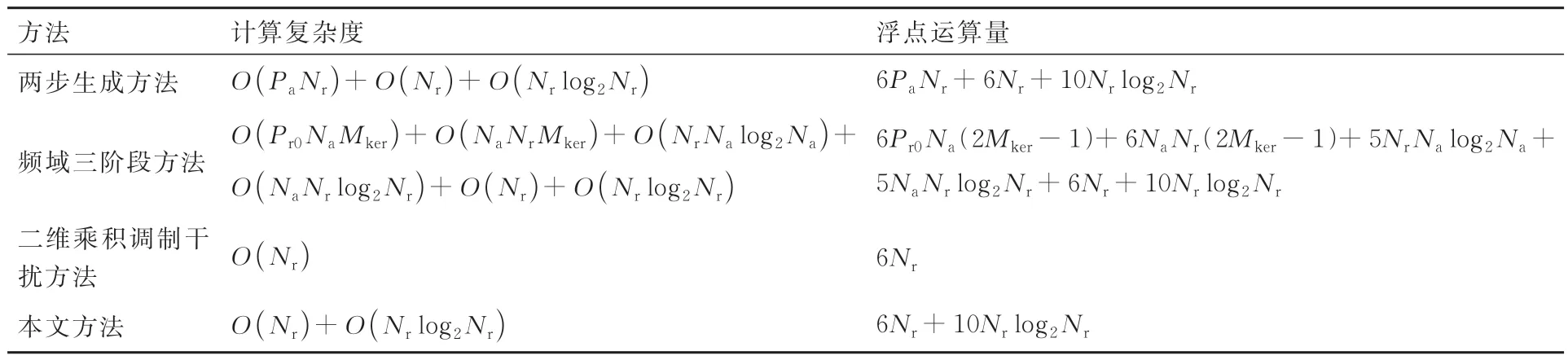
表2 各干擾方法實時調制運算量對比Table 2 Comparison of computational complexity of different algorithms
4 實 驗
為了驗證文中提出的干擾方法的有效性,以某星載SAR為干擾對象,其系統參數如表3所示。以下實驗仿真分析了采用文中所提方法的場景欺騙干擾效果,并與一維卷積干擾方法中的兩步生成方法、二維卷積類干擾方法中的頻域三階段方法和二維乘積調制方法生成的場景欺騙干擾效果做對比。干擾機放置在場景中心,坐標為(0,0) m。不特別強調時,均假設SAR發射線性調頻信號。所有實驗均用MATLAB 2021進行仿真,所用電腦配置為處理器:Intel(R) Core(TM) i7-8700; CPU @3.20 GHz 3.19 GHz;RAM: 16.0 GB。
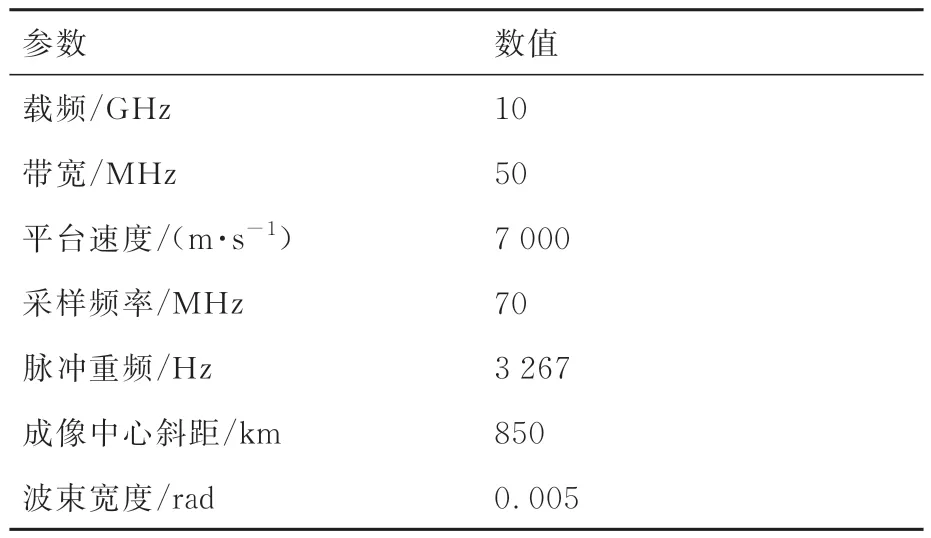
表3 SAR系統參數Table 3 Parameters of two-channel SAR-GMTI
4.1 欺騙點目標仿真
本節主要驗證文中所提距離卷積方位乘積調制干擾方法生成單個欺騙點目標的聚焦性能,并與兩步生成方法、頻域三階段方法和二維乘積調制干擾方法對比。為此設置了3個欺騙點目標P1、P2和P3,其在以干擾機為中心的坐標系中的 坐 標 分 別 為(0,0) m,(150,450) m,(300,1 050) m。分別用主瓣寬度(Impulse Response Width,IRW)、積分旁瓣比(Integrated Sidelobe Ratio, ISLR)和峰 值 旁 瓣 比(Peak Sidelobe Ratio,PSLR)來定量評估各方法生成虛假點目標的聚焦能力。由于生成(0,0) m處的虛假目標P1時,干擾機不需要做任何調制,因此,以上4種方法生成該假目標時結果是一致的,可以視為干擾機處真實點目標的回波,只在圖3中給出了其中一種方法生成該虛假點目標的結果,其IRW、ISLR和PSLR可以作為其他方法生成虛假點目標的參考。圖4~圖7分別給出了兩步生成方法、頻域三階段方法、二維乘積調制干擾方法和本文提出的距離卷積方位乘積調制干擾方法生成欺騙點目標的結果。
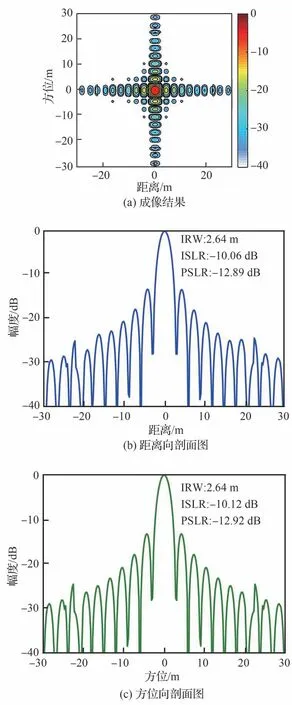
圖3 真實目標回波成像圖Fig.3 SAR image of real radar echo
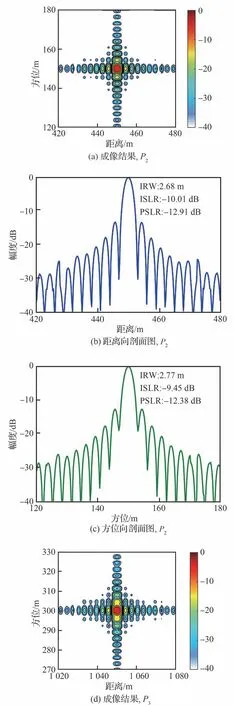
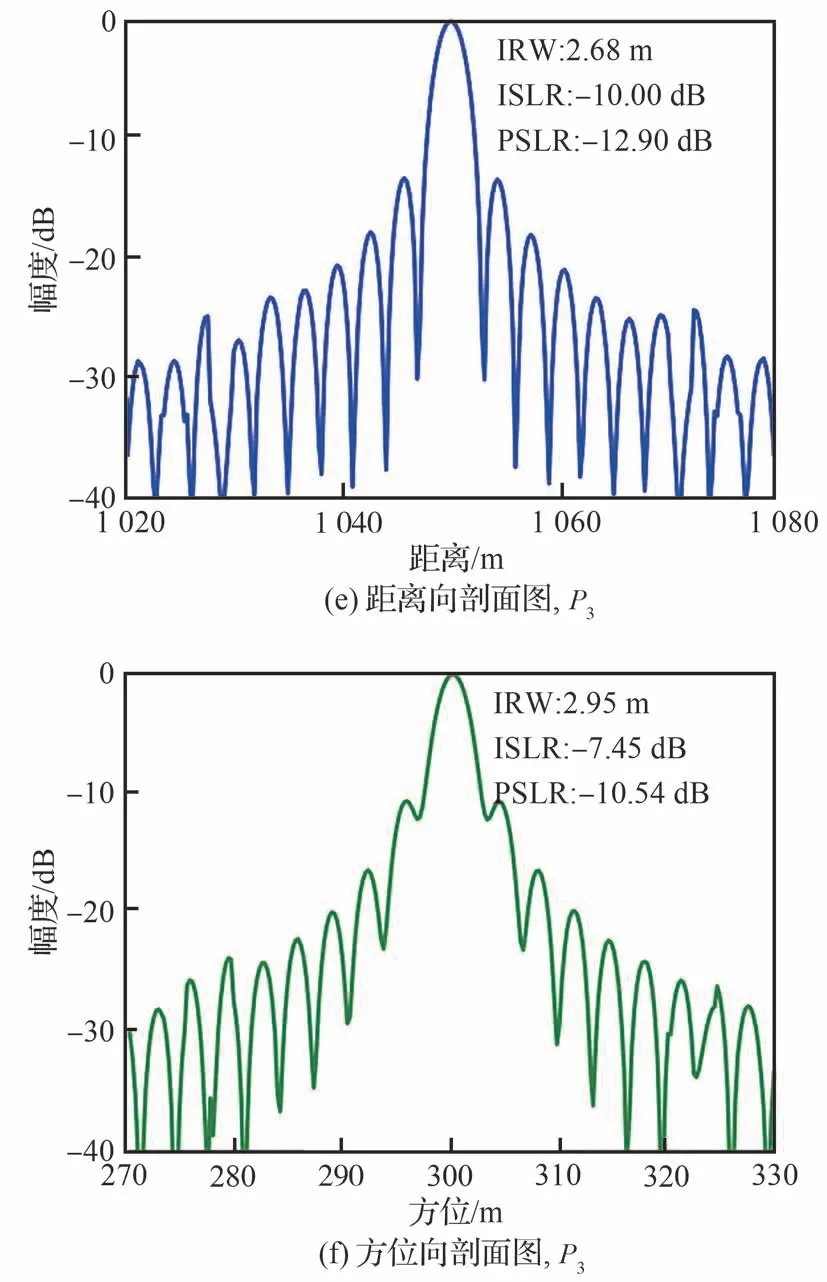
圖4 兩步生成方法成像圖Fig.4 SAR image using two-step method
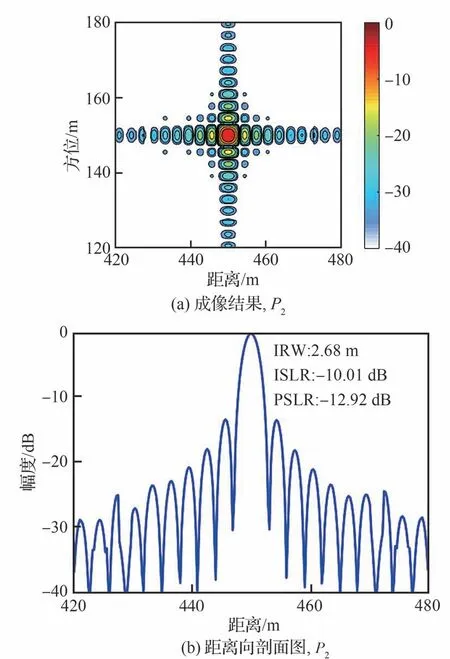
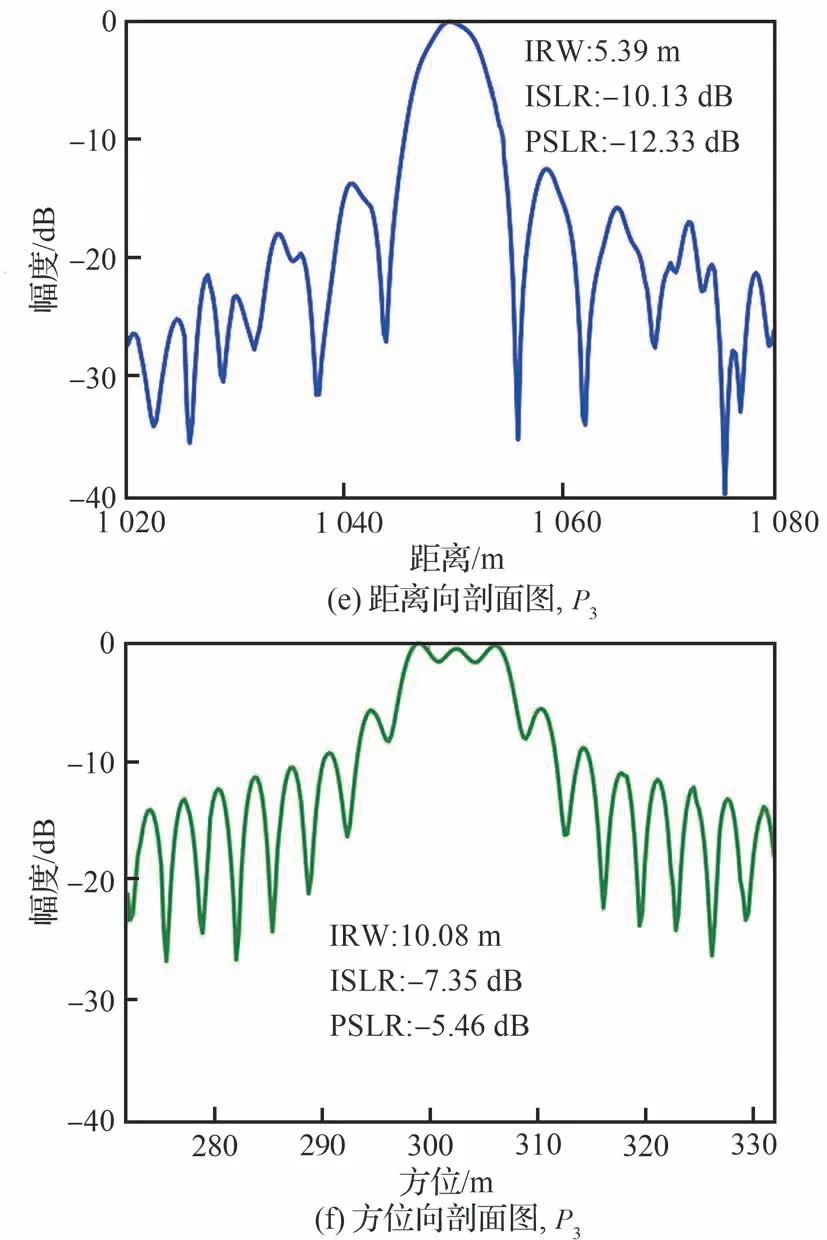
圖6 二維乘積調制干擾方法成像圖Fig.6 SAR image using two-dimension multiplication modulation jamming method
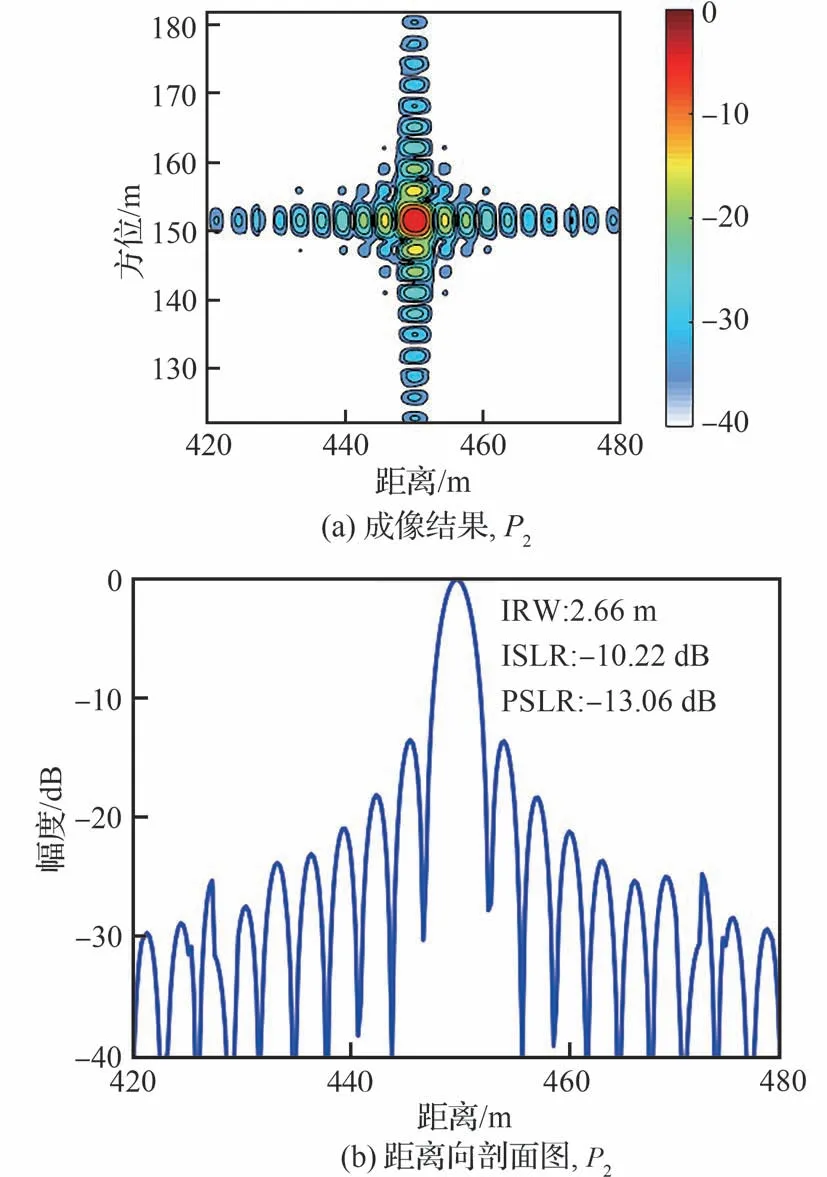
圖7 本文方法成像圖Fig.7 SAR image using the proposed method
由圖4~圖7可以發現:頻域三階段方法生成的虛假目標精度最高,生成的虛假目標P2、P3的聚焦性能與虛假目標P1最為接近。兩步生成方法生成的虛假目標在假目標遠離干擾機時方位向主瓣會有一定的展寬,并且峰值旁瓣比和積分旁瓣比都在提高,這說明假目標的聚焦能力在逐漸變弱。二維乘積調制干擾方法生成的欺騙點目標隨著不斷遠離干擾機,距離向和方位向主瓣寬度均明顯增加,并且積分旁瓣比和峰值旁瓣比也明顯提高,虛假點目標失真嚴重。本文提出的距離卷積方位乘積調制干擾方法生成的欺騙點目標在虛假目標遠離干擾機位置時,方位向主瓣也在展寬,且峰值旁瓣比和積分旁瓣比都在提高,但從各指標的具體數值來看聚焦性能比兩步生成方法稍差,這是因為只在方位向使用了乘積調制方法,會存在一定的匹配濾波損失,但相比二維乘積調制干擾方法聚焦性能要好。因此,本文提出的方法在生成欺騙點目標時,在距離向能夠獲得與卷積類干擾方法中的頻域三階段方法和兩步生成方法相近的干擾效果,好于二維乘積調制干擾方法。
4.2 欺騙場景仿真
本節主要驗證本文提出的距離卷積方位乘積干擾方法的有效性和高效性,并使用等效視數(Equivalent Number of Looks, ENL)[23],結構相似度(Structural Similarity Index, SSIM)[24],峰值 信 噪 比(Peak Signal to Noise Ratio,PSNR)[24]和相關系數(Correlation)[25]來定量進行欺騙干擾效果評價。這4個評估指標均滿足與欺騙模板越接近干擾效果越好的要求。圖8(a)為所要生成的欺騙模板,為TerraSAR對新加坡某區域成像的部分場景[26];圖8(b)~圖8(e)分別給出了使用兩步生成方法、頻域三階段方法、二維乘積調制干擾方法和本文提出的距離卷積方位乘積調制干擾方法生成欺騙場景的結果。從整體看,在方位向場景大小一定時,文中所提方法能夠生成與卷積類方法中的兩步生成方法和頻域三階段方法相同的逼真欺騙場景,而二維乘積調制干擾方法生成的場景在距離向遠離干擾機時會產生模糊,甚至會產生鬼影,無法準確生成欺騙場景,如圖8(d)的右側多出的一部分。

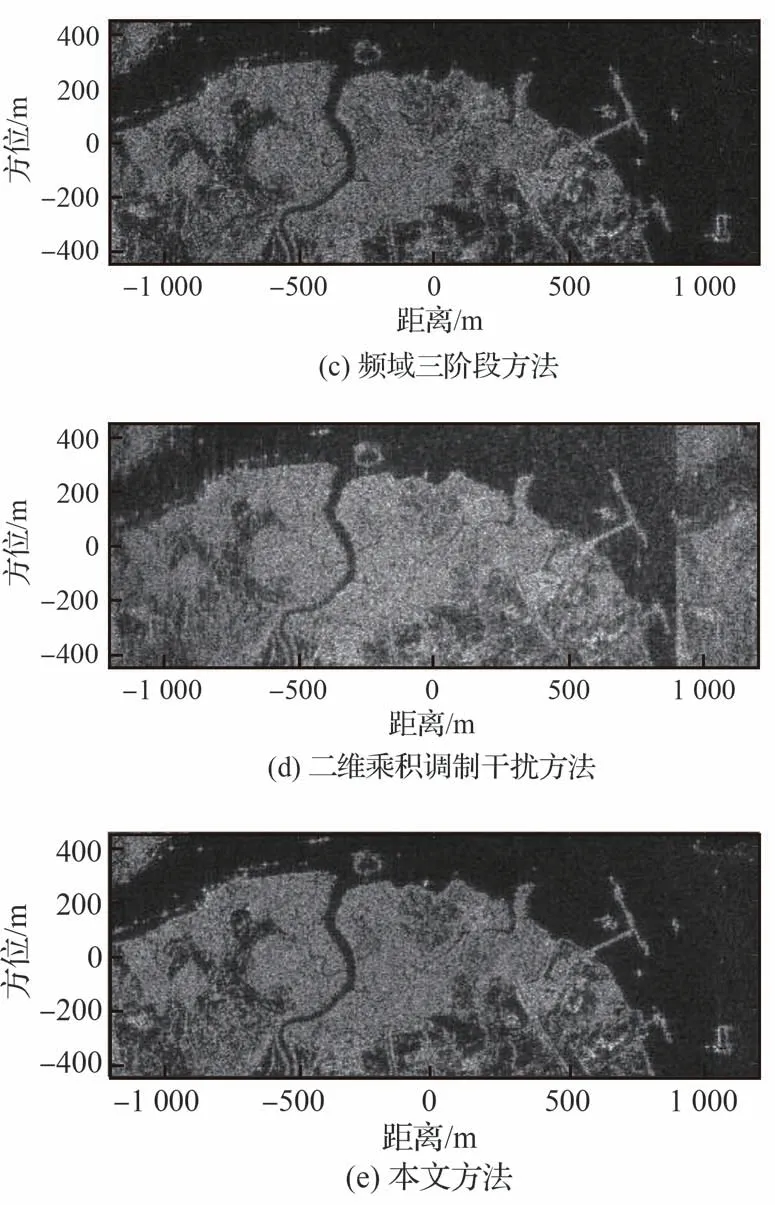
圖8 欺騙場景成像結果Fig.8 Imaging results of the deceptive scene
表4定量給出了各方法生成的虛假場景與欺騙模板的對比結果,其中由于求解欺騙模板PSNR分母為0,所以會求解出無窮大值。從表4中可以看出:頻域三階段方法干擾效果最好,兩步生成方法次之,二維乘積調制方法結果最差,本文方法接近兩步生成方法并優于二維乘積調制干擾方法。表5對比了4種方法生成欺騙場景單個慢時刻實時調制的耗時結果。從表5中可以看到:頻域三階段方法耗時最久,兩步生成方法次之,二維乘積調制干擾方法最為高效,本文所提方法相比二維乘積調制干擾方法略微偏大,但兩者較為接近,遠遠小于典型的卷積類方法中的兩步生成方法和頻域三階段方法。從以上結果中可以看出:距離卷積方位乘積調制干擾方法能兼具卷積類方法中的逼真度和二維乘積調制方法的低計算量優勢。
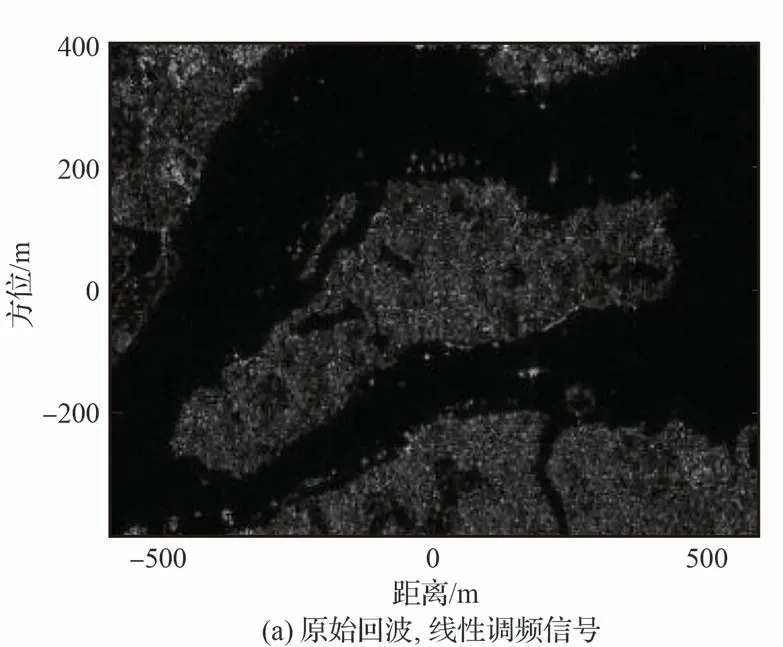

表4 各干擾方法生成的欺騙場景評估指標Table 4 Imaging evaluation indicators of deceptive scene using different jamming methods
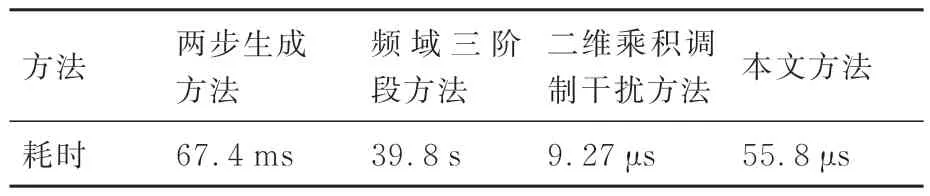
表5 不同干擾方法生成欺騙場景實時調制階段耗時對比Table 5 Comparison of time consumption of real-time modulation stage of deceptive scene generation using different jamming methods
圖9給出了SAR發射復雜波形信號時本文方法和二維乘積調制方法的欺騙干擾結果,仿真中設定SAR發射隨機頻率編碼信號,帶寬與線性調頻信號相同。從圖9中可以看出:在SAR發射線性調頻信號時,本文方法和二維乘積調制方法均能生成較為逼真的虛假場景;但在SAR發射隨機頻率編碼信號時,本文方法依然能夠實現欺騙干擾,但二維乘積調制方法則無法生成虛假場景,干擾效果變成了壓制干擾,這主要是因為二維乘積調制干擾的本質是移頻調制干擾,當SAR發射低多普勒容限的隨機頻率編碼信號時,干擾信號在距離向無法成像,因此,也就無法生成虛假場景。而本文方法使用卷積調制,在距離向上本質是延時調制,故干擾信號在距離向依然能聚焦成像并生成虛假場景。
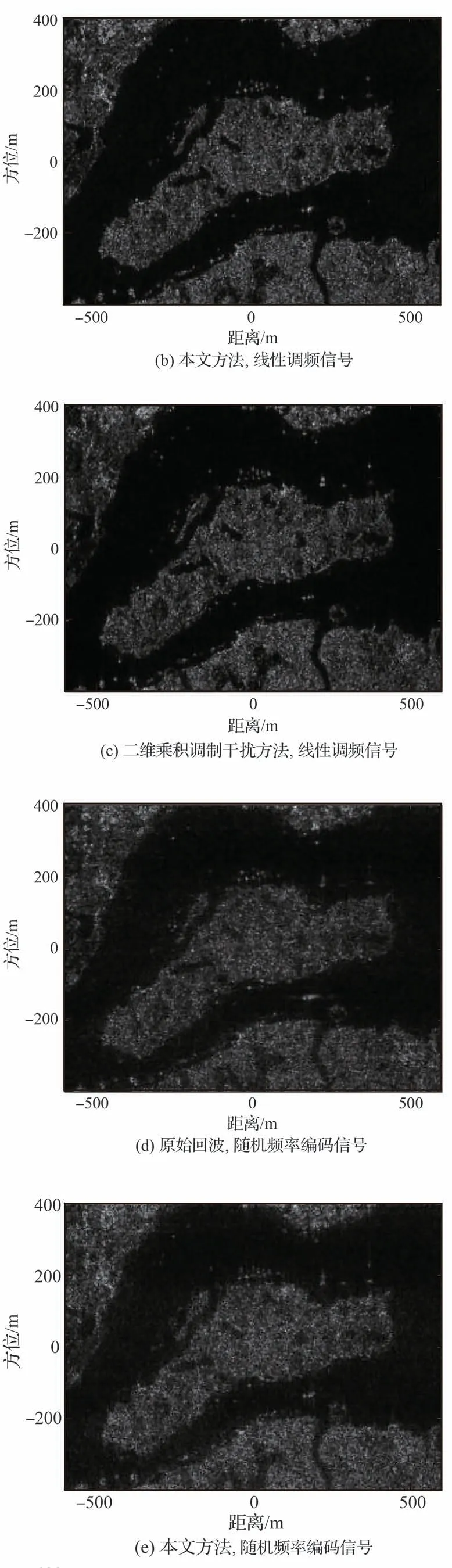
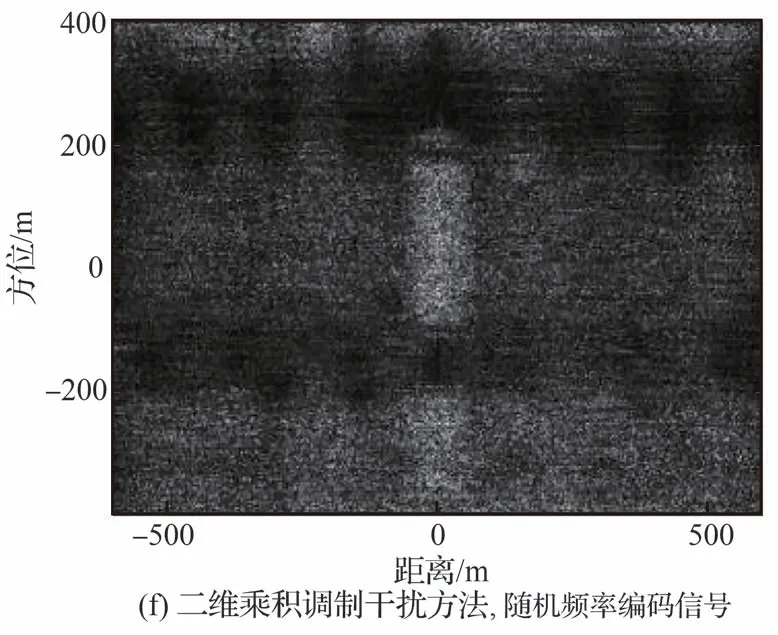
圖9 復雜波形欺騙場景成像結果Fig.9 Imaging results of deceptive scene for complex waveforms
4.3 計算耗時分析對比
為了進一步驗證文中所提方法的高效性,分別對比了兩步生成方法、頻域三階段方法、二維乘積調制干擾方法和本文方法生成不同數量的欺騙散射點時單個慢時刻實時調制所耗時間。仿真結果如表6所示,可以看到隨著模板的逐漸變大,模板內的散射點逐漸增多,兩步生成方法的計算耗時逐步增加,頻域三階段方法實時調制運算量則保持穩定,因為由表3可知,兩步生成方法的計算復雜度與模板的方位向點數有關,頻域三階段方法的計算復雜度與欺騙模板的大小無關;而二維乘積調制和距離卷積方位乘積調制干擾方法實時調制計算復雜度只與距離快時間和方位慢時間采樣點數有關,并不會隨模板大小發生改變,且耗時遠遠小于兩步生成方法和頻域三階段方法。另外,本文所提方法與二維乘積調制干擾方法相比,耗時相近,同處一個數量級,只是略微偏大。以上結果符合3.3節對各干擾方法實時調制計算復雜度的理論分析,證明了本文所提方法在生成欺騙干擾時的高效性。
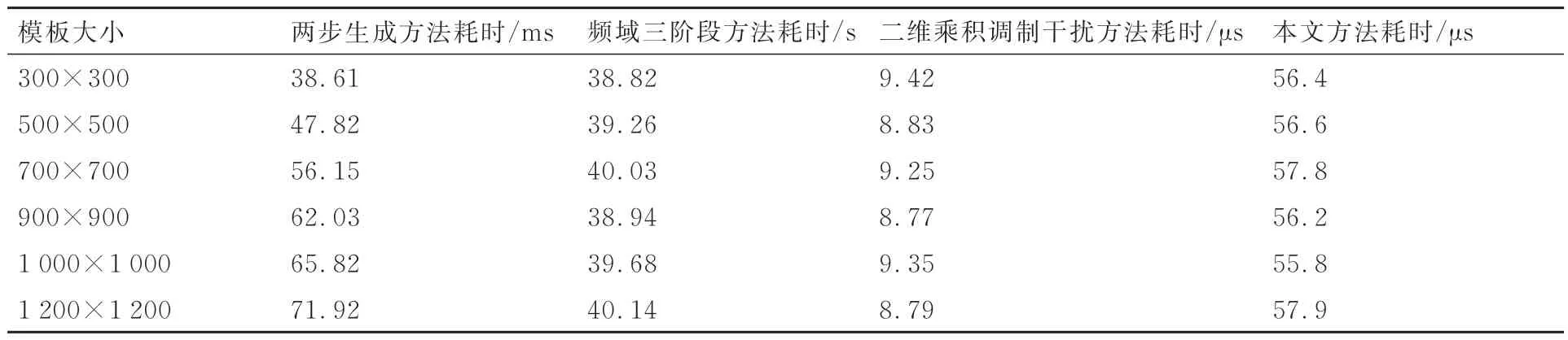
表6 欺騙干擾模板實時調制階段耗時對比Table 6 Comparison of time-consumption of real-time modulation stage of deceptive jamming templates
5 結 論
1)改進了ISAR的方位向乘積快速調制干擾方法,使其能應用到對SAR的方位向調制干擾中。
2)通過對SAR傳感器到目標點斜距的合理近似,簡化了干擾機頻率響應函數,使SAR方位乘積調制干擾能夠與SAR距離卷積調制干擾結合用于對SAR的干擾。
3)提出了SAR距離卷積方位乘積調制場景欺騙干擾方法,該方法相比已有的卷積類干擾方法降低了對偵察參數的需求和干擾實時調制計算復雜度,相比SAR二維乘積調制干擾,能夠擴大場景范圍并適應對復雜波形體制SAR的干擾。
4)定量給出了SAR距離卷積方位乘積調制干擾的場景欺騙干擾的范圍和實時調制計算量。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
