一種模擬直流道岔的實現方法
2023-10-18 12:43:30張濤
科學技術創新 2023年24期
關鍵詞:信號
張 濤
(卡斯柯信號有限公司硬件技術中心,上海)
引言
在全電子聯鎖系統中,直流道岔驅動單元實現了對四六線制道岔的驅動和表示回采的基本功能。在測試驗證環節,還需要模擬直流道岔轉轍機所處的不同條件,以及在此條件下測試驗證直流道岔驅動單元的響應策略等,并且在系統集成的時候也需要滿足一些自動化測試的要求。
然而,在對直流道岔轉轍機進行研發調試或測試驗證時,具有如下難點:在一定條件下需要模擬多臺轉轍機的動作時,由于真實轉轍機重量大,配線復雜,需要經常更改配線,容易發生錯誤或危險,所以很難實現多個道岔轉轍機增減時的靈活配置;真實轉轍機是機械結構的裝置,所以較難實現對轉轍機的轉動時間的精確定時;真實轉轍機的負載是電動機,額定電壓下,線圈驅動時的穩定電流大小是較為固定的,無法實現可調節的驅動電流;真實轉轍機的切換表示需要驅動轉轍機,或者手搖道岔,所以無法快速地進行道岔自動切換測試。為解決上述技術問題,且滿足多角度的測試需求,急需一種輔助系統,使道岔驅動測試驗證和確認更加完整。
本文旨在一定程度上解決相關技術中的技術問題之一。為此,本文介紹了一種模擬直流道岔模擬系統,為直流道岔驅動模擬測試和驗證提供了便利性,并提高了測試驗證結果的準確性。
1 功能結構及概述
如圖1 所示,左邊部分是驅動四六線制道岔的全電子板卡,右邊部分是本文所介紹的模擬直流道岔的PCBA 電路板。本方法包括如下幾個模塊:
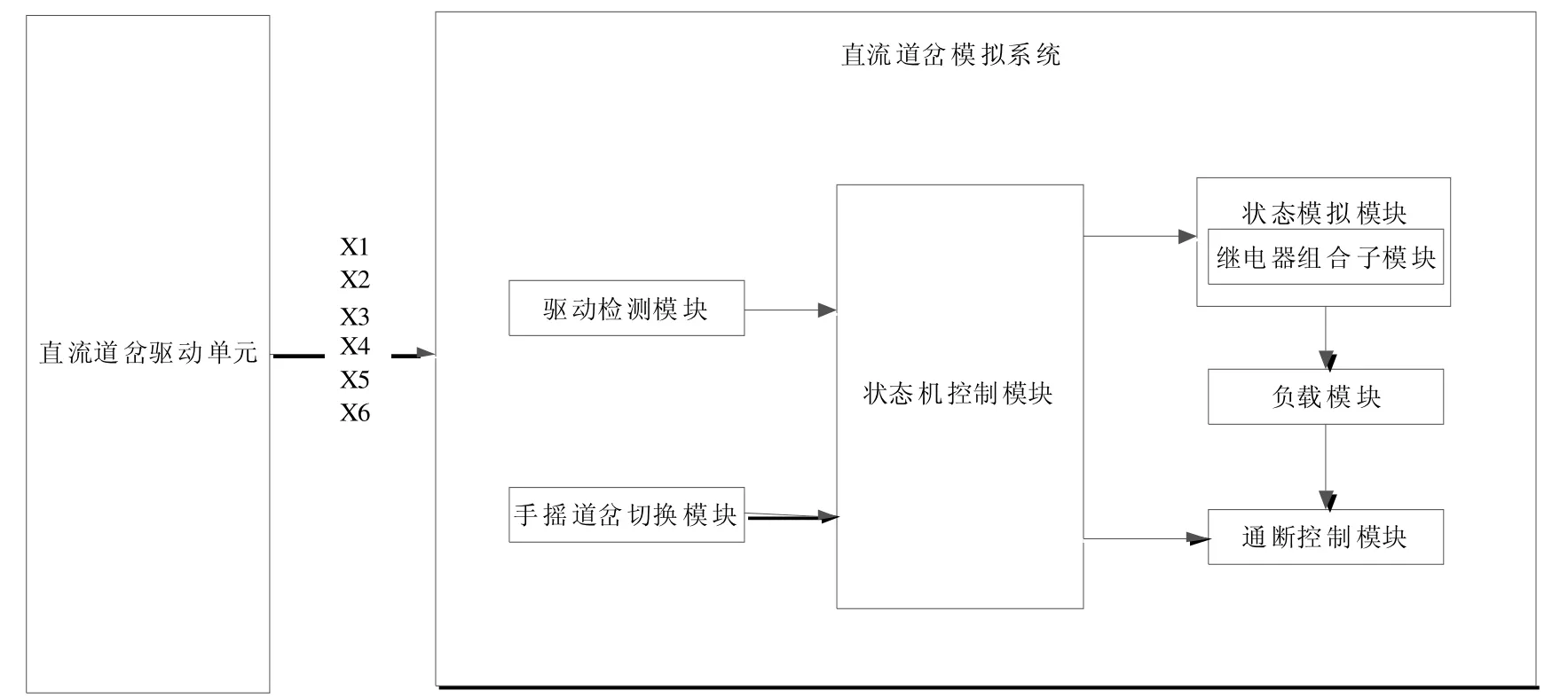
圖1 模擬系統框圖
(1) 驅動檢測模塊,用于檢測道岔的驅動狀態,并輸出對應的驅動狀態信息,是FPGA 狀態機模塊的輸入信號。
(2) 手搖道岔切換模塊,使用撥動開關等元器件模擬真實的手搖道岔的操作,達到切換道岔位置和狀態的目的,是FPGA 狀態機模塊的輸入信號。
(3) 狀態機按制模塊,與所述驅動檢測模塊連接,所述狀態機按制模塊用于根據所述驅動狀態信息和手搖道岔切換的信息,來設置PCBA 模擬的道岔位置狀態,輸出對應的驅動按制信號發給狀態模擬模塊。
(4) 狀態模擬模塊,與所述狀態機按制模塊連接,所述狀態模擬模塊用于根據所述驅動按制信號對相應的驅動狀態進行狀態模擬,按制強制導向安全繼電器組成的“繼電器組合子模塊”。
(5) 負載模塊,用于模擬驅動道岔的轉轍機的負載,可以擴展接口與電子負載相連,以獲得對負載的調整能力。
(6) 通斷按制模塊,與所述狀態機按制模塊和所述負載模塊連接,所述通斷按制模塊用于根據所述驅動按制信號對所述負載模塊進行延時通斷、保護按制,達到保護繼電器觸點,保護負載模塊不會過熱燒壞的目的。
2 技術方案介紹
2.1 驅動檢測模塊
如圖2 所示,設計的電路包括4 個驅動檢測模塊,分別對應X1 X2(定位驅動狀態)、X5 X6(反位驅動狀態)的驅動去線和X4 間,如果有驅動信號,相應的會產生有效的信號輸出到FPGA 的狀態按制模塊中。
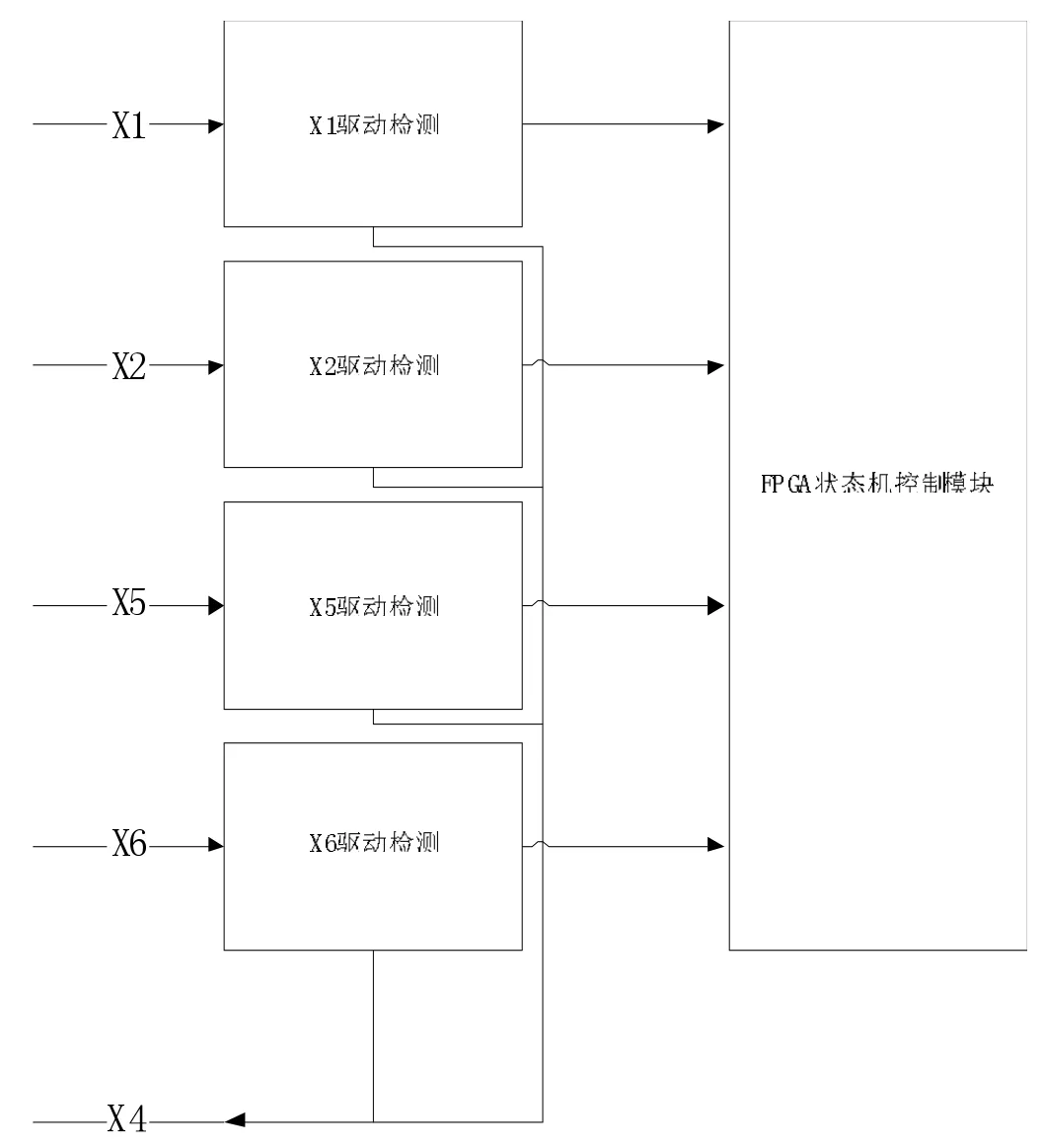
圖2 驅動檢測模塊框圖
2.2 手搖道岔切換模塊
如圖3 所示,設計的電路包括2 個驅動檢測模塊,分別對應定位手搖檢測、反位手搖檢測和GND 間,如果有驅動信號,相應的會產生有效的信號輸出到FPGA 的狀態按制模塊中。
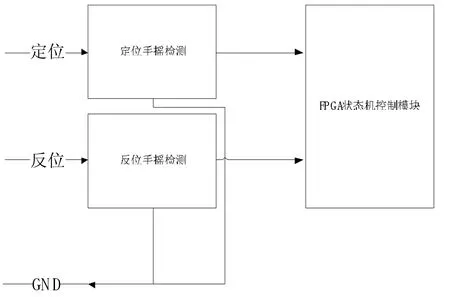
圖3 手搖切換模塊框圖
2.3 FPGA 狀態機按制模塊
針對狀態機按制模塊,具體的實現可以基于FPGA的狀態機邏輯實現,如圖4 所示,定義了5 個狀態:S0_db 定位表示狀態、S1_fc 反位驅動狀態、S2_fb 反位表示狀態、S3_dc 定位驅動狀態、S4_no_bs 無表示狀態。

圖4 FPGA狀態機框圖
當道岔處在S0_db 定位表示狀態時,根據反位驅動狀態信息X2_X6_fc_active=1,或手搖道岔切換的有效信號switch_fc_active=1,狀態機按制模塊響應狀態切換至S1_fc,并輸出對繼電器組合子模塊、通斷按制模塊的驅動按制信號,以實現模擬真實轉轍機的按制。
當道岔處在S1_fc 反位驅動狀態時,狀態機按制模塊可以設置模擬系統的反位驅動時間fc_time_is_up=1,當時間到時,fc_time_is_up=0,狀態機按制模塊按制道岔切換至S2_fb 狀態即反位表示狀態。
當道岔處在S2_fb 反位表示狀態時,根據定位驅動狀態信息X1_X5_dc_active=1,或手搖道岔切換模塊給定的有效信號switch_dc_active=1,狀態機按制模塊響應狀態切換至S3_dc,并輸出對繼電器組合子模塊、通斷按制模塊的驅動按制信號,以實現模擬真實轉轍機的按制。
當道岔處在S3_dc 定位驅動狀態時,可以設置模擬系統的定位驅動時間dc_time_is_up=1,當時間到時,dc_time_is_up=0,狀態機按制模塊按制道岔切換至S0_db 狀態。
其中,圖4 中的S4_no_bs 是異常情況下的狀態,處在該狀態的原因是驅動時間不足。當處在S1_fc 反位驅動狀態時,可以設置模擬系統的反位驅動時間fc_time_is_up=1,當時間未到時,fc_time_is_up=1,但X2_X6_fc_active=0 已經不再驅動有效了,此時狀態機按制模塊按制切換至S4_no_bs 狀態;當處在S3_dc 定位驅動狀態時,可以設置模擬系統的定位驅動時間dc_time_is_up=1,當時間未到時,dc_time_is_up=1,但X1_X5_dc_active=0 已經不再驅動有效了,此時狀態機按制模塊按制切換至S4_no_bs 狀態。
當跳出S4_no_bs的異常狀態時,則需要重新驅動。其中,反位驅動X2_X6_fc_active=1 能轉換至S1_fc 狀態,或定位驅動X1_X5_dc_active=1 能轉換至S3_dc 狀態。
當道岔處在S0_db 定位表示狀態時,也可通過手搖道岔切換模塊給定有效信號switch_fc_active=1,以進入S1_fc 即反位驅動狀態;當道岔處在S2_fb 反位表示狀態時,也可通過手搖道岔切換模塊給定有效信號switch_dc_active=1,進入S3_dc 即定位驅動狀態。
2.4 轉轍機狀態模擬按制模塊
本模塊將道岔轉轍機的開閉器的狀態分為3 個位置表示,如圖5 所示,對應上章節中的5 個狀態機的關系,可以更新清楚地了解FPGA 狀態機間的轉換,對應的強制導向安全繼電器間的位置。通過繼電器的節點打開和關閉,模擬了道岔開閉器的位置。
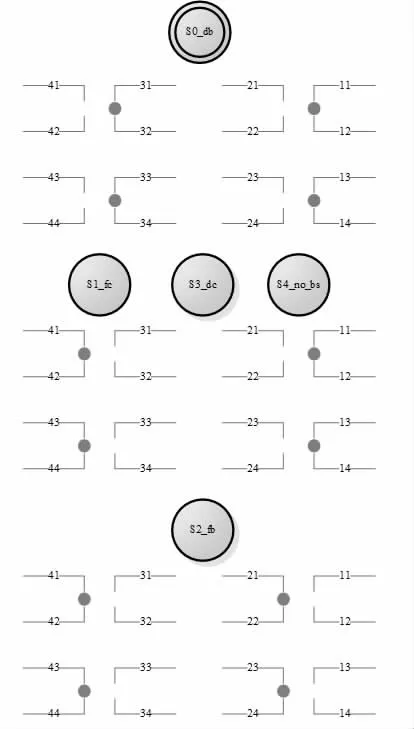
圖5 轉轍機狀態模擬按制模塊框圖
2.5 負載模塊
用電阻模擬了轉轍機線圈,在驅動導通過,使加路中產生相應的電流,按照轉轍機平穩電流大概為2 A 左右,轉動時間為2 秒來計算,最大的升溫不能超過電阻的最高溫度限制,并適當地降額。可以采用串聯和并聯的方式來降低單個電阻的功率。
2.6 通斷按制模塊
本模塊主要用于進行適當的延時,保護繼電器觸點防止拉弧,在繼電器觸點良好地閉合后,再打開MOSFET。另一方面,當負載電阻驅動過一次之后,進行保護延時,保護時間到了以后再允許再次驅動,這樣能防止高頻率驅動導致電阻過溫燒壞。
如圖6 所示,延時輸出或設置超時能有效地保護模擬PCBA 可靠穩定地運行。
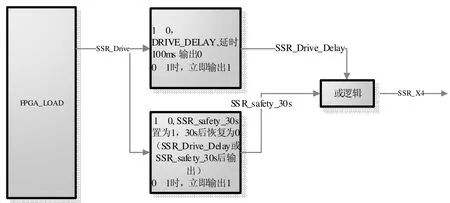
圖6 通斷按制模塊模塊框圖
3 技術方案優點
本文通過驅動檢測模塊檢測道岔的驅動狀態,并輸出對應的驅動狀態信息,然后通過狀態機按制模塊根據所述驅動狀態信息輸出對應的驅動按制信號,再通過狀態模擬模塊根據所述驅動按制信號對相應的驅動狀態進行狀態模擬,從而可完成道岔模擬系統的搭建,使得系統搭建更加簡單便捷,且將該系統通過固定配線與外部直流道岔驅動單元連接,即可實現多個道岔轉轍機增減時的靈活配置;并且,通過外接電子負載能夠實現道岔驅動電流的可調節,以及通過負載通斷的延時按制能夠讓繼電器觸點在大電流通斷過程中得到滅弧保護;另外,通過驅動按制的定時按制還能提高測試驗證的準確性,以及通過手搖道岔切換模塊給定道岔切換信號,能夠避免道岔的手搖操作,從而便于能夠快速地進行自動切換測試。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
