基于有限階積分法的球面光電穩(wěn)定平臺機構運動特性分析
2023-10-21 06:44:48賈子釗李少哲姚建濤趙永生
燕山大學學報 2023年5期
韓 博,賈子釗,江 源,李少哲,姚建濤,*,趙永生
(1.燕山大學 河北省并聯(lián)機器人與機電系統(tǒng)實驗室,河北 秦皇島 066004;2.燕山大學 先進鍛壓成形技術與科學教育部重點實驗室,河北 秦皇島 066004)
0 引言
隨著軍事科技的發(fā)展,光電成像追蹤勘察需求逐漸增大,光電穩(wěn)定平臺的發(fā)展受到了廣泛關注。光電穩(wěn)定平臺是一種將光電成像設備安裝在飛行載體上的機電裝備,可以保持光電探測器視軸穩(wěn)定,對目標快速實施捕獲、跟蹤、瞄準[1]。三軸光電穩(wěn)定平臺具有三種運動模式,分別為偏航、俯仰和橫滾,其作為高精度、高穩(wěn)定性和快速響應的偵察設備在軍民領域內(nèi)有著廣闊的發(fā)展前景[2]。
并聯(lián)機構具有剛度大、誤差小、精度高、動態(tài)特性好等特點,現(xiàn)已廣泛應用于航空航天等領域[5]。球面并聯(lián)機構作為一種特殊的并聯(lián)機構,機構上所有點相對于球心的距離保持不變,即構件始終在某個特定的球面上運動,此類機構具有機構緊湊、靈活可靠等特點[7]。球面3-RRR(R為轉動副)并聯(lián)機構作為三自由度球面并聯(lián)機構受到了廣泛的研究[9],Staicu等[12]進行了 3-RRR 球形手腕并聯(lián)機器人的逆運動學分析;單彥霞等[13]進行了2UPS-2RPU-PU(U為萬向副,P為移動副,S為球面副)機構的逆運動學與正運動學分析,并求解了其工作空間和奇異位點,然而文中僅構建了正運動學求解中存在的非線性強耦合性方程,并沒有進一步進行數(shù)值解的計算。張邦成等[14]提出了有限轉動張量法和力與力矩平衡分析法,構建了系統(tǒng)逆運動學數(shù)學模型,得到了運動學非線性方程組;劉承磊等[15]提出了一種四自由度廣義球面解耦并聯(lián)機構,并建立了機構運動學模型,但是該分析方法在非解耦機構上實施存在困難。陳子明等[16]提出了一種基于3-UPU并聯(lián)機構的新型踝關節(jié)康復機構,對機構的自由度及逆運動學進行了解算,建立了機構的運動學模型,并進一步求解了工作空間;胡波等[17]采用逐次逼近法求解了新型六自由度4-UPS+PSPR并聯(lián)機構的正運動學模型,但該方法并沒有克服傳統(tǒng)正運動學計算中存在的計算量大、數(shù)值解求解困難的缺點。張英等[18]為了解決三自由度平面并聯(lián)機構的正運動學建模和求解時需要建立坐標系和消元的問題,基于共形幾何代數(shù)提出了一種脫離坐標系的幾何建模和免消元計算方法,然而該方法在空間機構正運動學分析上存在困難。王啟明等[19]提出了一種基于類線性解耦幾何解析法與高階收斂迭代法相結合的混合方法分析了并聯(lián)機構正運動學,但是該方法存在計算精度較低的問題。Yang等[20]以單位對偶四元數(shù)作為機器人系統(tǒng)的廣義坐標,推導了正運動學方程,提出了一種新算法并與牛頓迭代法進行了比較,該方法的局限在于僅適用于六自由度并聯(lián)機構的正運動學分析,無法實現(xiàn)對少自由度并聯(lián)機構正運動學分析。Ye等[21]提出了五自由度混合機器人的解析正運動學和逆運動學求解方案,在正運動學問題中,提出了一種基于Sylvester透析消去法將高階運動學方程轉化為四次多項式的方法,并進一步通過Ferrari法得到解析解;在逆運動學中,首先提出了用四次旋轉表示的冗余歐拉角來解耦不同的運動,該方法的局限是僅適用于特殊機構,并不具有通用性。Gallardo[22]應用了一種簡單的方法來進行純移動并聯(lián)機構的正運動學分析,基于移動平臺上的三個點的未知坐標生成運動學方程,此方法適用于平面和空間移動平臺,不需要引入旋轉矩陣,大大簡化了方程的推導。
因為并聯(lián)機構具有多條分支所以其逆運動學求解比較容易,正運動學求解困難。當前學者們對于球面3-RRR并聯(lián)機構運動學分析的研究主要集中在逆運動學的分析,少數(shù)的正運動學分析則多是采用四元數(shù)方法通過代數(shù)手段將正運動學方程轉化為僅有單一變量的高階高耦合約束方程,最后利用數(shù)值分析方法對其求數(shù)值解。本文基于有限階積分法[23]對球面3-RRR并聯(lián)光電穩(wěn)定平臺機構進行運動學分析,拓展了有限階積分法在并聯(lián)機構運動學求解中的應用,為并聯(lián)機構正運動學求解提供了新的思路。
1 穩(wěn)定平臺與有限階積分法
1.1 球面光電穩(wěn)定平臺
球面光電穩(wěn)定平臺如圖1所示,具有三個自由度,運動副都在同一個球面上運動,轉動副軸線相交于空間內(nèi)一點,該點是球面機構的轉動中心,通過伺服電機驅動可以自零位實現(xiàn)偏航轉動±15°、俯仰轉動±15°、橫滾轉動±15°。
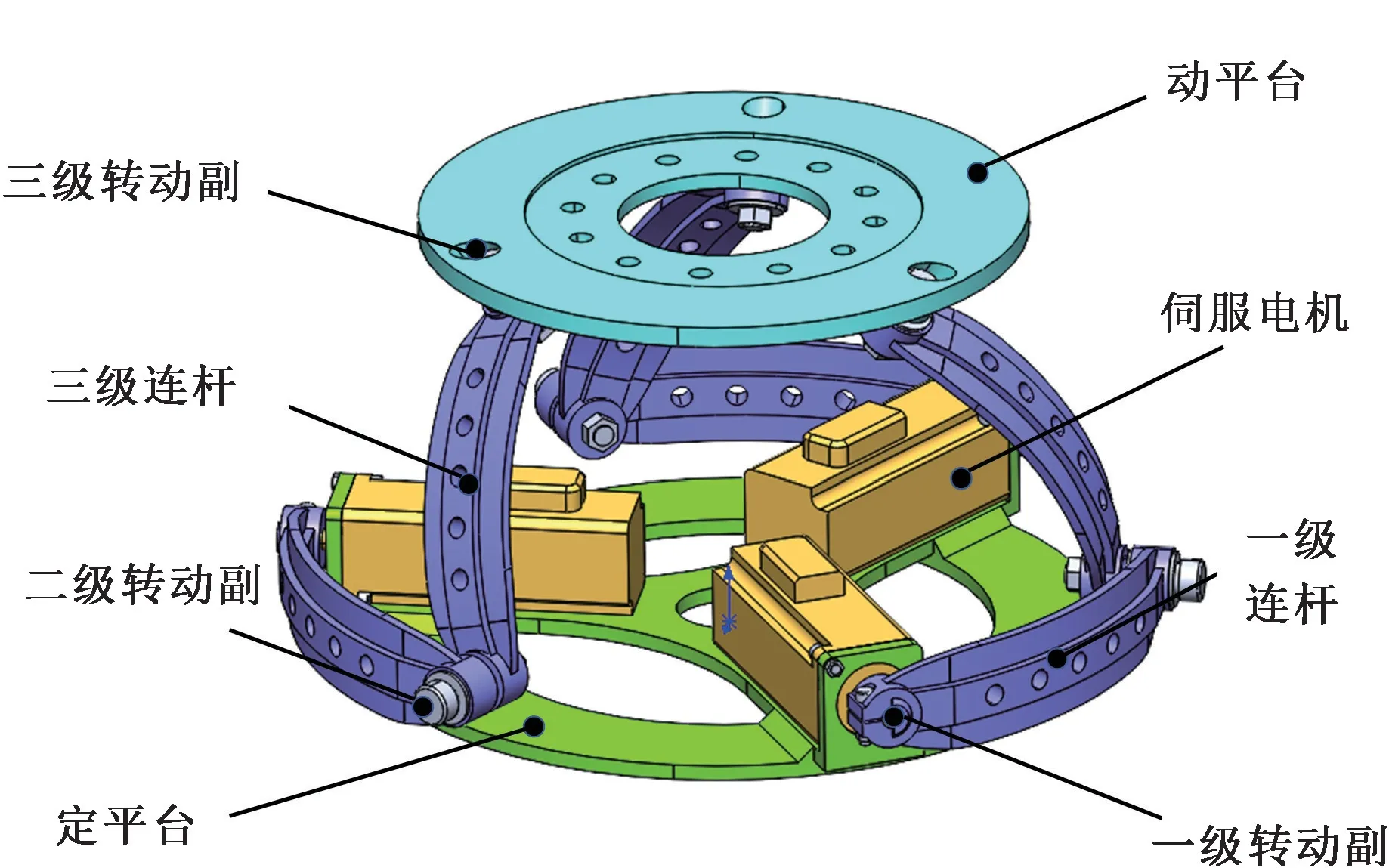
圖1 球面光電穩(wěn)定平臺Fig.1 Spherical photoelectric stabilized platform
1.2 有限階積分法
有限階積分法的原理[23]是將靜態(tài)求解轉化為動態(tài)線性疊加過程求解,求解原理示意圖如圖2所示。
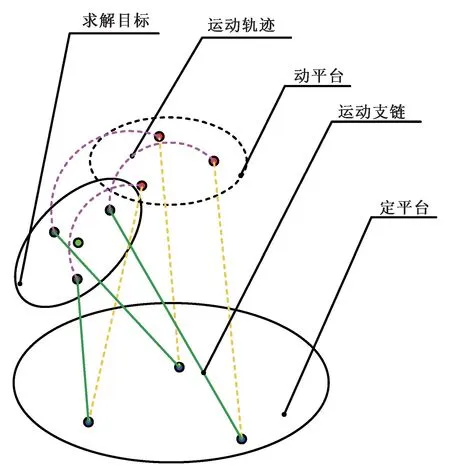
圖2 動態(tài)軌跡求解原理Fig.2 Principle of solving dynamic trajectories
任意并聯(lián)機構都存在一個初始位姿,從初始位姿到達目標位姿理論上存在著無數(shù)種路徑,每一種路徑都對應驅動關節(jié)的一種輸入函數(shù)。當給定運動學正解輸入時,通過某種輸入函數(shù)并在驅動關節(jié)驅動下動平臺通過某種路徑達到目標位姿。有限階積分法的優(yōu)點是有效地避免了傳統(tǒng)正運動學分析中存在的復雜約束系統(tǒng)建模。
如圖3所示,從并聯(lián)機構的零位即初始位姿開始,將驅動關節(jié)運動行程分成有限微小區(qū)間,根據(jù)機構模型的特性,建立當前位置和目標位姿的映射關系便可求出該微小區(qū)間末端時刻動平臺的坐標,依次進行迭代,每一次迭代由上一時刻所求坐標信息作為本次迭代的已知量。當所有微小區(qū)間內(nèi)的運算全部完成時所得的結果即為在給定驅動條件下動平臺的目標位姿。
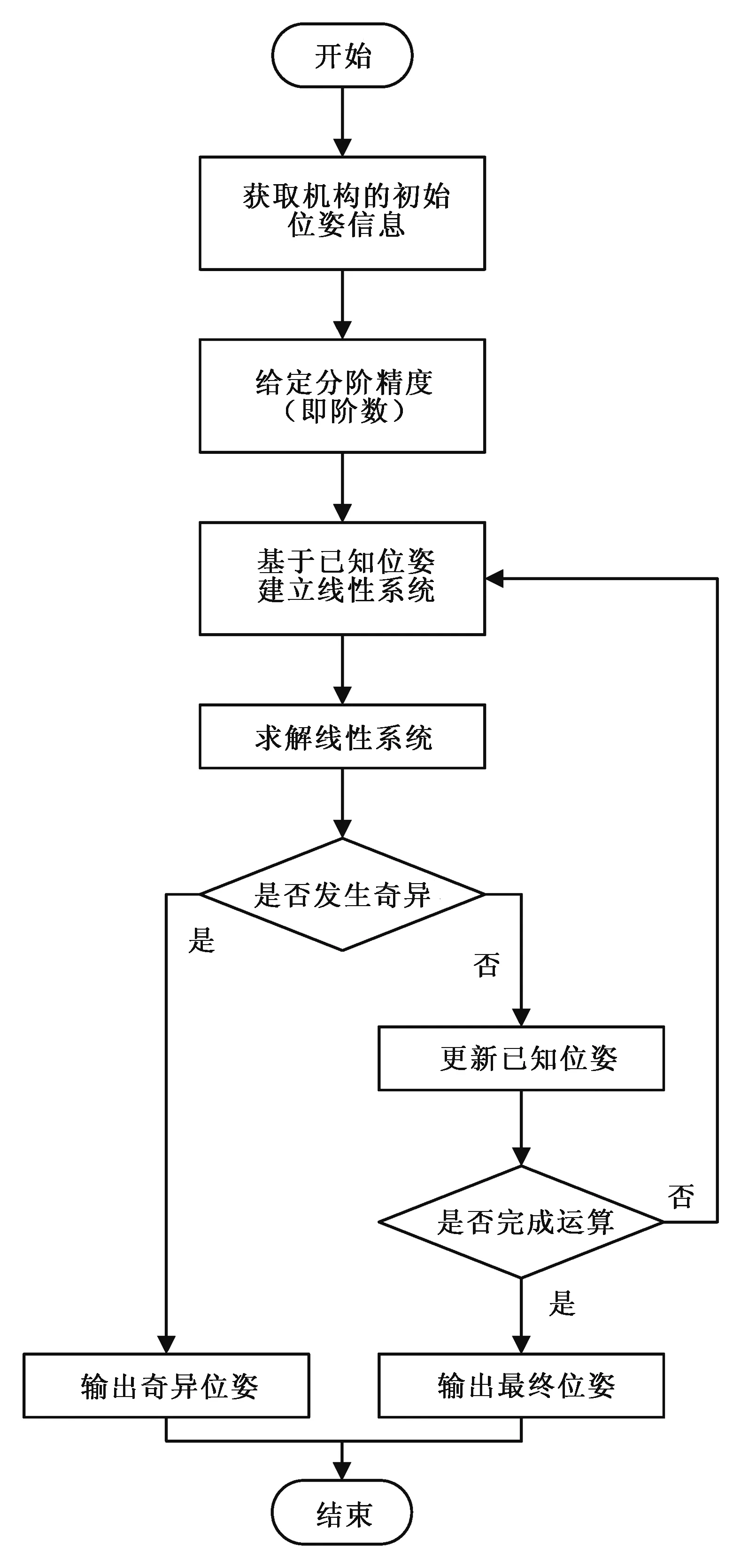
圖3 有限階積分法原理圖Fig.3 Schematic diagram of finite-step-integration method
2 運動學分析
2.1 球面光電穩(wěn)定平臺機構
球面3-RRR光電穩(wěn)定平臺結構示意圖,如圖4所示。

圖4 球面3-RRR光電穩(wěn)定平臺機構簡圖Fig.4 Schematic diagram of spherical 3-RRR photoelectric stabilization platform mechanism
取球心O作為坐標系原點,建立定坐標系Oxyz,動坐標系Ox'y'z',球面半徑為r,三條分支鏈上3個關節(jié)軸線之間夾角都為60°,?i為第i支鏈上第一級關節(jié)單位向量,該關節(jié)為驅動關節(jié)用大寫符號表示,μi為第i支鏈上第二級關節(jié)單位向量,νi為第i支鏈上第三級關節(jié)單位向量(i=1,2,3)。三條支鏈上第一級轉動關節(jié)方向單位向量為
三條支鏈上第二級轉動關節(jié)方向單位向量為
三條支鏈上第三級轉動關節(jié)方向單位向量為
2.2 運動學建模
機構初始位姿信息為已知條件,在機構運動過程中驅動關節(jié)轉動某一角度時動平臺達到目標位姿,有限階積分法將該過程劃分為有限微小區(qū)間的集合。由于3-RRR球面機構只有3個轉動自由度,在微小區(qū)間內(nèi)可以將支鏈的運動分為兩步,第一步,支鏈整體隨著第一級關節(jié)轉動一個角度達到該階段的中間位姿;第二步,支鏈第三級連桿繞第二級關節(jié)轉動某一未知角度達到末端位姿(該階段的目標位姿),機構的原理簡圖如圖5所示。
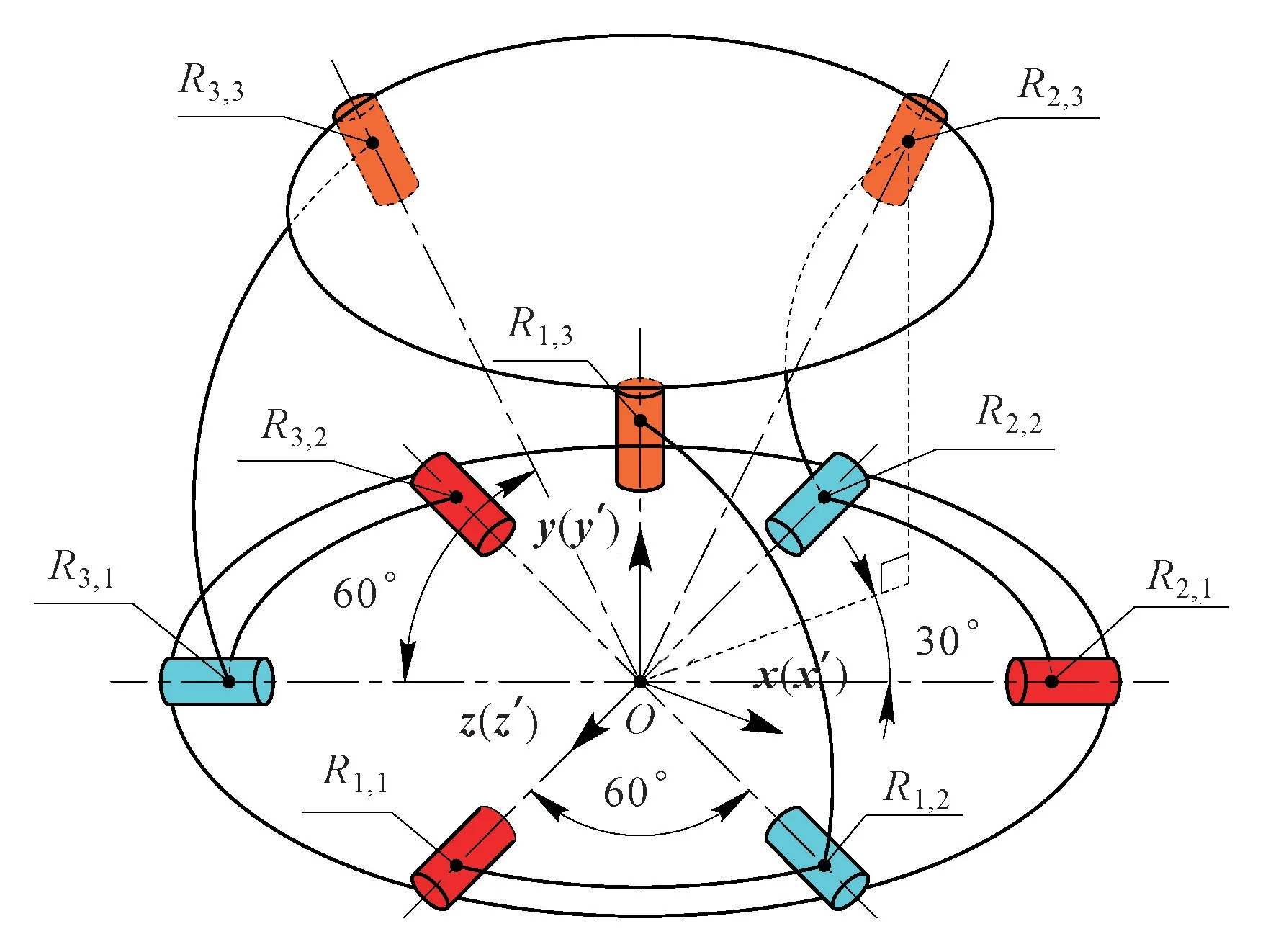
圖5 參考點位置示意圖Fig.5 Reference point location diagram
選取參考點為各轉動關節(jié)軸線與單位球的交點,將該階段初始位姿各個參考點標記為Ri,1,Ri,2,Ri,3,中間位姿各個參考點標記為R'i,1,R'i,2,R'i,3,末端位姿各個參考點標記為R″i,1,R″i,2,R″i,3(i=1,2,3)。因此,基于微小區(qū)間內(nèi)構件的運動向量建立如下約束方程組:
在微小轉動區(qū)間內(nèi)∠R″i,3R'i,3R'i,2近似等于90°,將上式進行線性化得
在定坐標系內(nèi),由于該機構只有3個轉動自由度,微小區(qū)間內(nèi)第三級轉動關節(jié)的運動可以看作從初始位姿繞著動坐標系原點轉過某一未知角度到達該階段的末端位姿,因此可建立方程組如下:
因在微小轉動區(qū)間內(nèi)∠Ri,3OR″i,3近似等于90°,經(jīng)線性化處理得
動平臺上的關節(jié)中心隨著動平臺做剛體旋轉運動,因此,根據(jù)剛體上向量間的射影不變性得
聯(lián)立式(8)、(9)得
因為在微小區(qū)間內(nèi)的非線性項為二次項,根據(jù)微分幾何理論可以直接消去,經(jīng)線性化處理得
聯(lián)立式(5)、(7)、(11)可以構建具有9個未知量和9個線性方程。系數(shù)矩陣為
其中,0=[0 0 0]。
約束系統(tǒng)的未知量為
約束系統(tǒng)的常數(shù)列向量為
根據(jù)線性系統(tǒng)的代數(shù)結構:
可以求得矩陣d9×1中的9個未知元素,這9個未知元素分別為3條支鏈上得第三關節(jié)在經(jīng)過一次微小變化后的位置向量。將當前階段求解的結果作為下一次運算的已知量,經(jīng)過連續(xù)k次求解即可得到球面3-RRR光電穩(wěn)定平臺機構的運動學正解。根據(jù)上述分析利用MATLAB軟件進行正運動學算法編程,求解動平臺末端位姿。并在ADAMS軟件中建立仿真模型(如圖6所示)對正運動學數(shù)值解進行驗證。
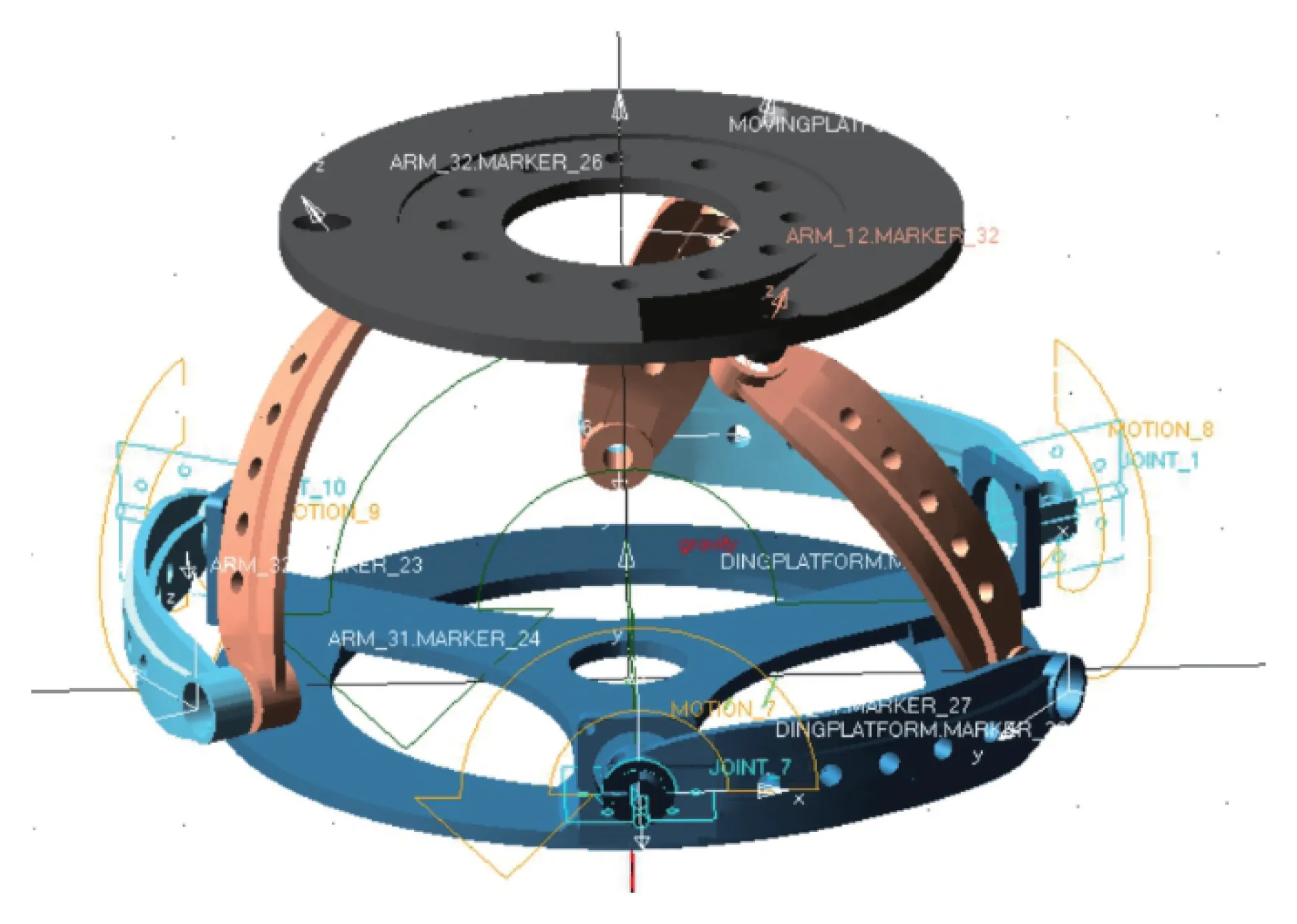
圖6 球面3-RRR機構ADAMS仿真模型Fig.6 ADAMS simulation model of spherical 3-RRR mechanism
當給定支鏈一、二、三中驅動關節(jié)轉動角度為:-20°,40°,-30°時,運算階數(shù)被分別設置為1 000~10 000(運算階數(shù)每次遞增1 000)時,3條支鏈上第三關節(jié)軸線方向向量實際值與計算值之間的角度(支鏈一、二、三上第三關節(jié)軸線方向向量計算值與實際值之間的夾角分別記作誤差1,2,3)共得到十組數(shù)據(jù)作為有限階積分法的精度指標。誤差計算結果與階運算所需時間如表1和圖7所示。

表1 誤差值與運算時間Tab.1 Error value and operation time
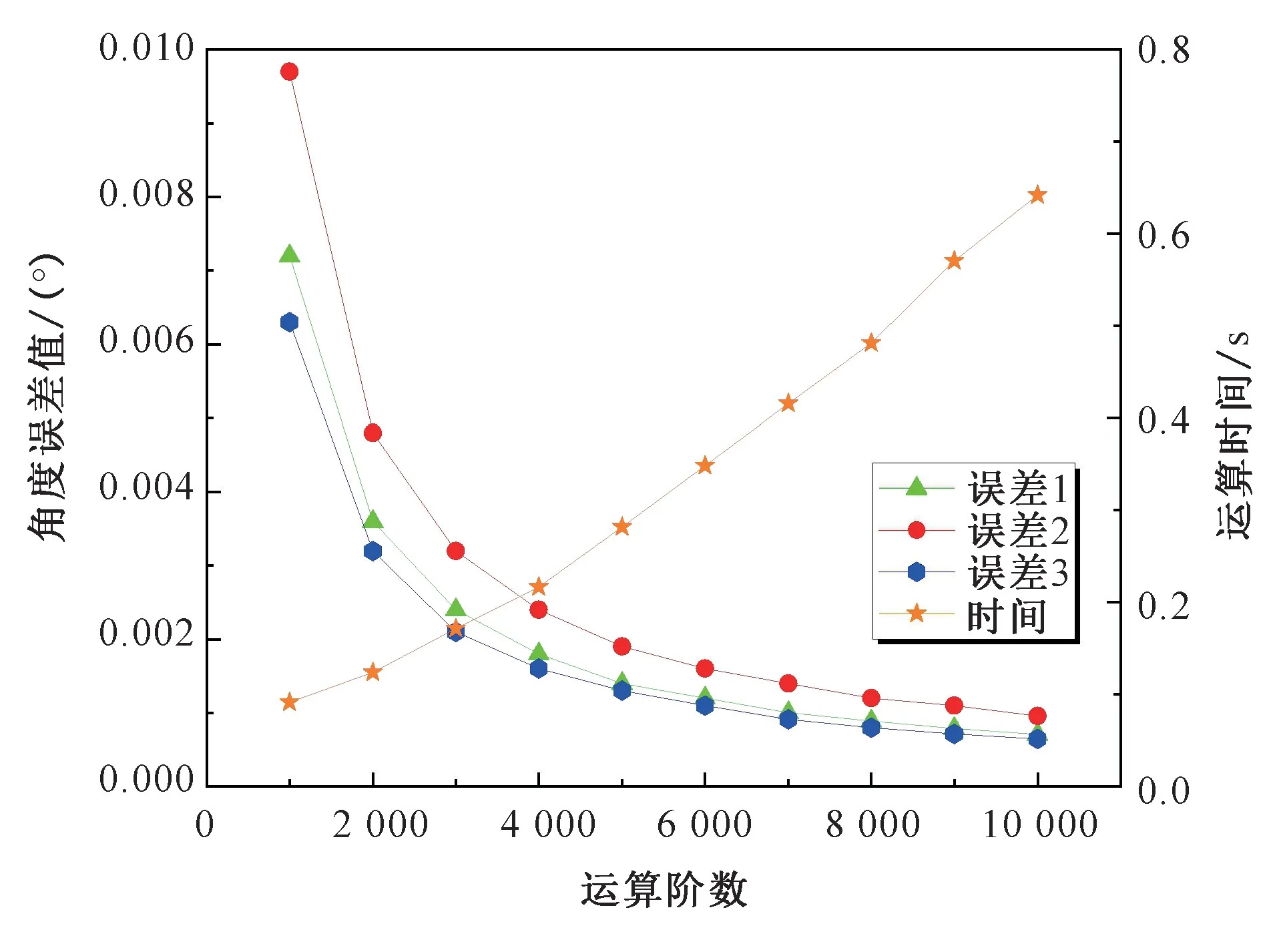
圖7 誤差值與運算時間趨勢圖Fig.7 Trend chart of angle error value and operation time
通過表1和圖7可知,當運算階數(shù)設置為1 000時,單次階運算時間小于0.1 s,位姿誤差小于0.01°,當運算階數(shù)設置為10 000時,單次階運算時間小于0.65 s,位姿角度誤差小于0.001°。
圖7的曲線趨勢表明,有限階積分法對于正運動學解的精確性與時效性存在反相關關系,即運算階數(shù)的選取應該針對工程問題的具體實施目標而定。例如,當機構整體的運算精度的要求要達到0.001°時,階數(shù)k的可取值10 000以上;如果對于算法的時效性要求達到0.5 s以下,則階數(shù)k的可取值8 000以下。因此,有限階積分法是一種能夠根據(jù)計算需求進行性能調(diào)整的算法。
3 工作空間和奇異分析
根據(jù)球面光電穩(wěn)定平臺工作條件要求:動平臺3個方向上轉動范圍在±12°之間,并聯(lián)機構動平臺需要實現(xiàn)在工作空間內(nèi)進行位姿調(diào)整。現(xiàn)對其進行可達工作空間求解,從機構正運動學角度出發(fā),利用有限階積分法求解工作空間克服了遍歷搜索法計算量大的缺點,并且具有可達工作空間邊界計算準確的優(yōu)點。
在給定三個驅動關節(jié)轉動范圍為-30°~30°時,通過MATLAB編程計算得到球面3-RRR光電穩(wěn)定平臺機構的可達工作空間如圖8所示。可達工作空間包絡住需求工作空間,表明該機構的工作空間足以適應光電穩(wěn)定平臺基本工作空間要求。
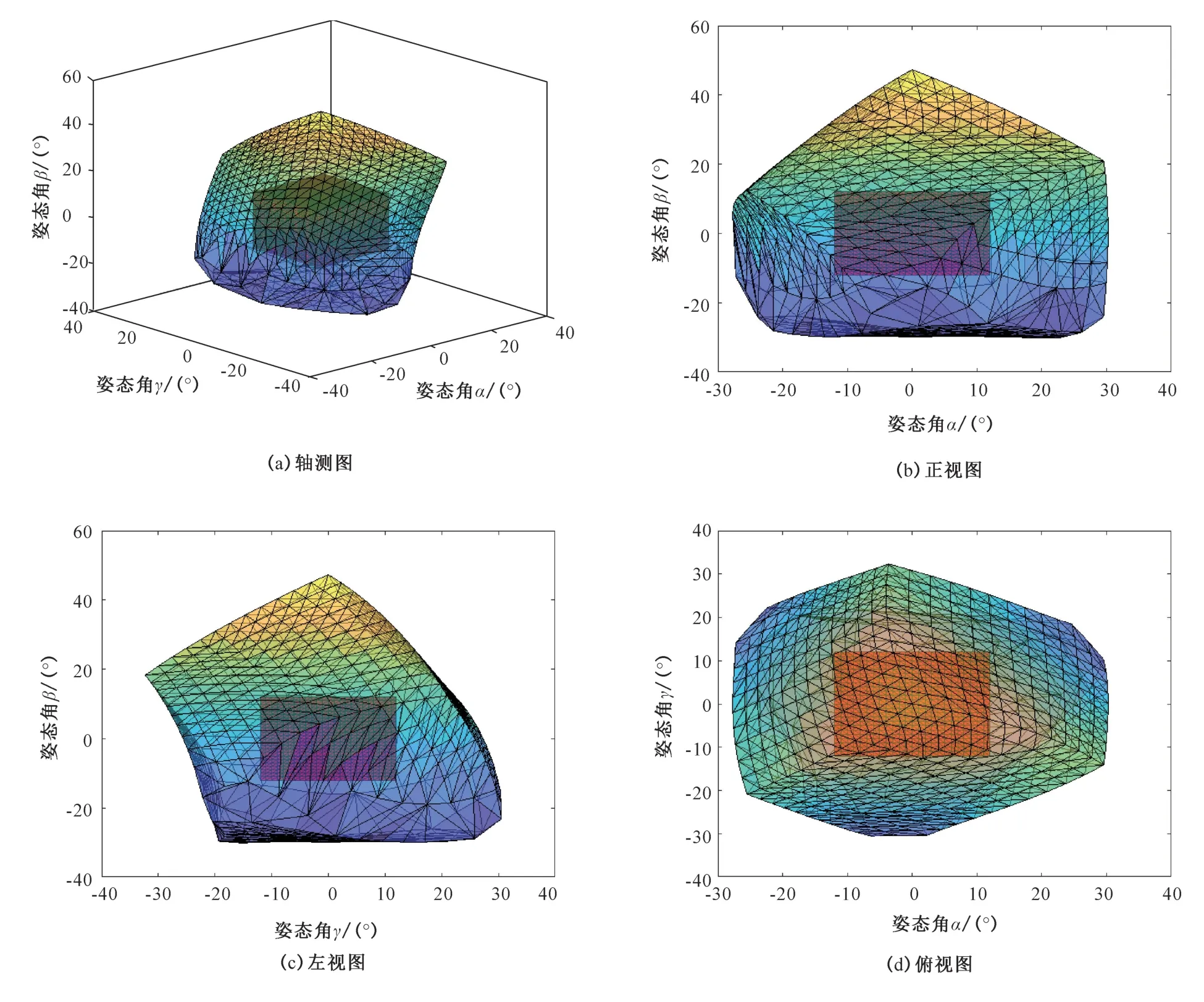
圖8 球面3-RRR光電穩(wěn)定平臺可達工作空間Fig.8 The spherical 3-RRR photo stabilized platform reachable workspace
奇異性判別方法:在區(qū)間[-30,30]內(nèi)取兩端極限值作為驅動關節(jié)的輸入,在每次階運算中,計算并記錄的值作為判斷機構是否在當前位點發(fā)生運動學奇異的標志。初始位姿時=0.36,在階運算過程中,的值變?yōu)?時則認為發(fā)生奇異,但在浮點運算中可能存在的值無限接近于0但此時已經(jīng)發(fā)生奇異,所以需要設定一個閾值來有效地避免因為計算機計算精度過高導致錯將奇異位點認作可達位點。經(jīng)過多次數(shù)值試驗發(fā)現(xiàn),當閾值設置為初始狀態(tài)的1%時可以較好地對奇異位點進行判別,因此,本文確定當<0.36×10-2時則該階段階運算時機構發(fā)生奇異。
機構的奇異按照奇異形成原因可以分為運動學奇異和約束奇異[24]。為了保證球面光電穩(wěn)定平臺在工作過程中不會出現(xiàn)失控現(xiàn)象,要盡量避免機構處于奇異位型。運用有限階積分法可以在每一次階運算階段通過系數(shù)矩陣行列式的值判斷機構是否發(fā)生運動學奇異。由于有限階積分法中正運動學方程組是依據(jù)并聯(lián)機構的運動特性建立,所以當其系數(shù)矩陣行列式的秩為0時,有兩種可能的情況:一是正運動學方程組無解,此時機構的運動螺旋發(fā)生線性相關,機構發(fā)生運動學奇異;二是正運動學方程組多解,此時機構的約束螺旋系發(fā)生線性相關,機構發(fā)生約束奇異。
通過分析圖8知球面光電穩(wěn)定平臺需求工作空間完全被可達工作空間包絡,可得球面光電穩(wěn)定平臺在需求工作空間內(nèi)不存在奇異。奇異分析的結果可以應用在軌跡規(guī)劃中從而避免在機構運動過程中出現(xiàn)死點或失穩(wěn)現(xiàn)象。
4 結論
本文研究了一種球面光電穩(wěn)定平臺及其正運動學特性,并介紹了一種用于解決并聯(lián)機構正運動學分析這類非線性問題的理論方法,即有限階積分法。利用有限階積分法求解了光電穩(wěn)定平臺的正運動學位置解,并研究了計算精度與效率,最后求解了平臺的可達工作空間。研究表明:本文所提出的3-RRR球面光電穩(wěn)定平臺能夠為光電設備提供全向姿態(tài)的穩(wěn)定調(diào)控功能;根據(jù)本文所分析的工作空間這一運動特性可知,穩(wěn)定平臺的工作范圍可以完全覆蓋設計需求;所提出的有限階積分法在并聯(lián)機構正運動學計算、工作空間分析方面都表現(xiàn)出了良好的效果。
進一步展望文中所述的有限階積分法,在計算過程中對于機構的運動軌跡實現(xiàn)了全面的解析,即該方法理論上可以應用于動平臺的正向運動速度與加速度分析,以及通過驅動關節(jié)反饋的傳感數(shù)據(jù),對平臺已經(jīng)發(fā)生的運動進行軌跡追蹤。綜上所述,本文為光電穩(wěn)定平臺的機構設計與運動特性分析提供了借鑒與指導。
