城市軌道交通信號系統過分相限速保護方案研究
2023-10-24 08:41:18楊榮兵梁建彬畢文峰張定文
現代城市軌道交通 2023年10期
關鍵詞:設備
楊榮兵,梁建彬,畢文峰,張定文
(1. 成都地鐵運營有限公司,四川成都 610081 ;2. 卡斯柯信號有限公司,上海 200435)
1 概述
國內城市軌道交通行業各線路列車在非正常運營情況下需要切換為人工駕駛模式,在人工駕駛模式中,限制人工駕駛模式(RM)同樣受限列車運行速度不得超過25 km/h的規定,同時信號系統RM運行超速防護。對于單相交流供電制式線路會在2個供電分區的分隔處設置分相區,運行中的電客車需利用慣性通過分相區。實際運營過程中,當信號系統出現故障或故障車連掛運行需要切換到RM運行時,就會存在列車因限速過低無法利用慣性通過分相區的問題。因此,本文提出一種過分相駕駛模式,并以某條設計最高運行速度160 km/h、配置電客車最高運行速度140 km/h、接觸網電分相中性區域長度160 m的城市軌道交通線路為例,對信號系統新增“過分相駕駛模式”的可行性進行討論,確保非正常運營情況下信號系統提供人工駕駛模式的超速防護及列車正常通過分相區2個目標實現。
2 接口要求和存在的問題
2.1 相關規范要求
在單相交流牽引供電系統中,列車是由單相電源供電的,為使電力系統的三相供電負荷平衡和提高電網的利用率,供電接觸網采用分相段供電。國內城市軌道交通線路采用單相交流牽引供電制式時,為防止兩供電分區之間因電力相位不同產生的相位電位差,導致運行的電客車受損,通常在2個供電分區的分隔處設置電分相設備以防止相間短路,并實現A、B、C相電源相序隔離。分相區中性區段簡要示意如圖1所示。
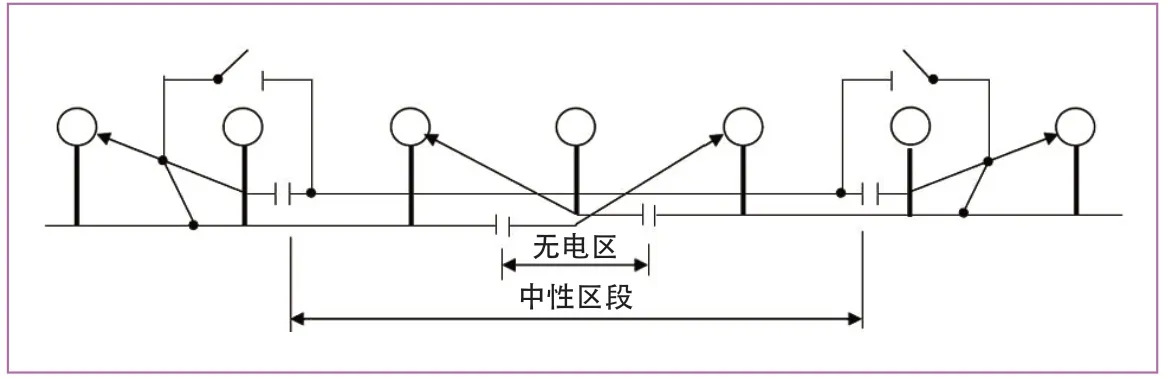
圖1 分相區中性區段示意圖
根據《鐵路技術管理規程》(鐵總科技[2014]172號),在電氣化區段接觸網電分相前方,需分別設置斷電標、禁止雙弓標。對于最大運行速度高于120 km/h的旅客列車,在斷電標的前方增設特殊斷電標(T斷)。在雙線電氣化區段,需在“合”“斷”電標背面分別加裝“斷”“合”字標,作為反方向行車的“斷”“合”電標使用。分相區布置示意如圖2所示。
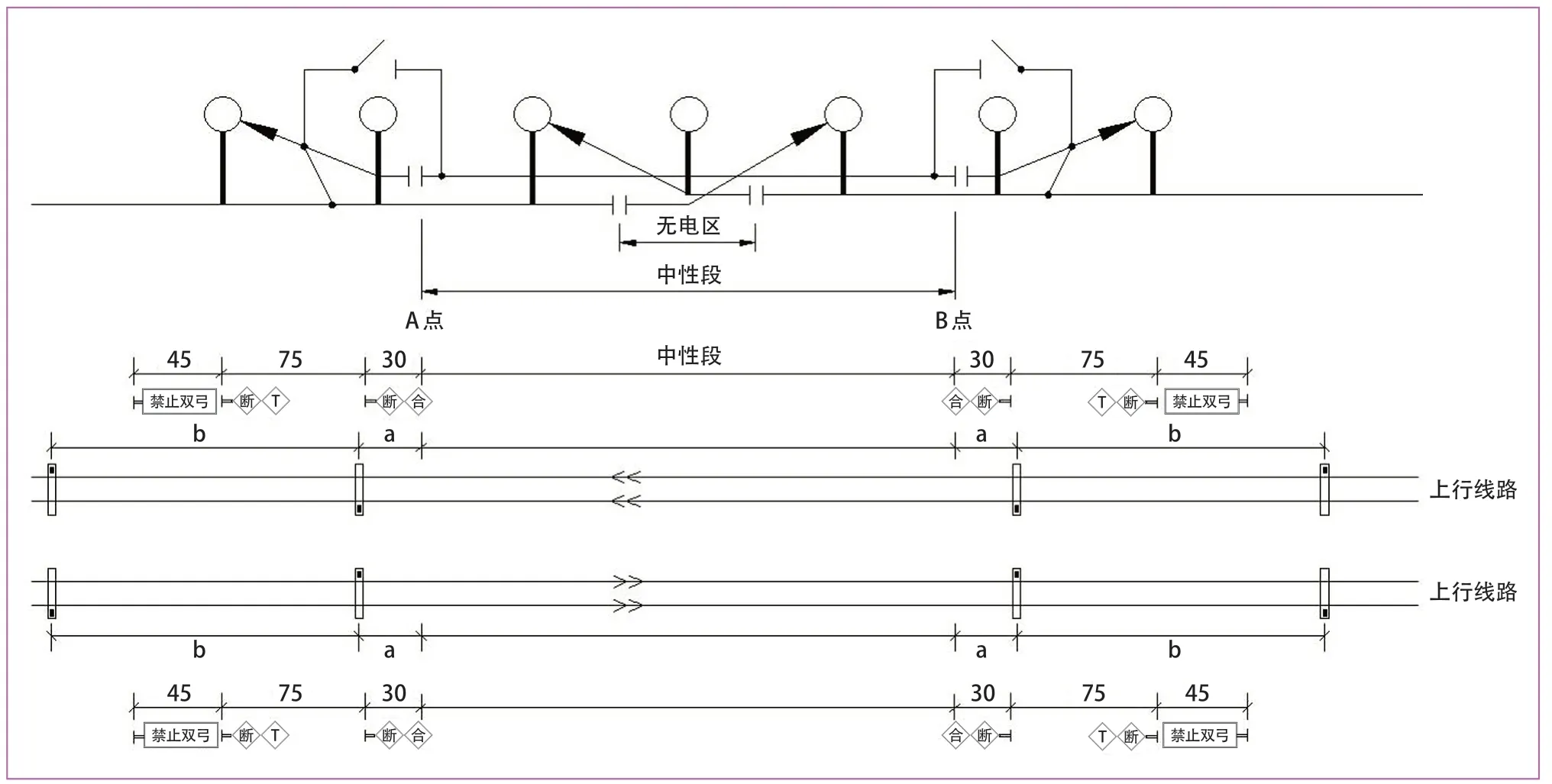
圖2 分相區布置示意圖(單位:m)
根據《車載控制自動過分相系統技術條件》(TB/T 3197-2018),從“斷”電標位置為中心向左右兩端各5 m確定第一個地面磁感應器的安裝位置(強迫斷點)a,定下第一個地面磁感應器的安裝位置(強迫斷點),再以這個點為中點向左右分別測量一定距離b,定下第二點的位置(預告點)。同時反向運行時的預告點和強迫斷點,也作為正向運行時的恢復點使用。對于非貨運專線,a = 35 m、b = 170 m。從列車運行方向起依次設置禁止雙弓標、特殊斷電標(T斷)、斷電標、合電標。
按照《軌道交通客運列車斷電過分相系統相互匹配準則》(GB/T 36981-2018)相關要求,故障運行限速模式下,“合”電標前的出口行駛速度不宜低于5 km/h。
2.2 線路設計情況
本研究線路牽引供電系統設計的中性段距離長度為160 m,其中無電區為30 m。本線屬于非貨運專線,a = 35 m,b = 170 m,對應“斷”“合”電標布置地面磁感應器。當列車通過時,根據讀取地面磁感應器發送的信號自動進行“斷”“合”主斷路器操作。列車通過自動分相區時,車輛讀取地面磁感應器信息自動“斷”“合”主斷路器的惰行距離為:(b + a +中性段+ a)=(170 + 35 + 160 + 35)= 400 m。人工駕駛列車通過分相區時,正常情況下司機按照軌旁特殊斷電標(T斷)、合電標人工“斷”“合”主斷路器的惰行距離為:75 + 30 +中性段+ 30 = 75 + 30 + 160 + 30 = 295 m。
2.3 范本接口要求
按照中國城市軌道交通協會發布的《城市軌道交通車輛與信號系統接口技術要求(范本)》4.3.1.3要求,信號系統提供RM按固定限速進行超速防護,當信號系統檢測到超速時立即啟動報警并施加緊急制動,直至列車停止運行。
本線設計與國內慣例及通行設計限速取值25 km/h保持一致。按照設計方案,非正常運營模式下(含 RM和故障車推送模式),由司機手動駕駛列車通過分相區。
2.4 存在問題
按照上述要求,經牽引計算可知,當司機采用RM操縱列車以不高于25 km/h的速度運行時,在本線分相區設計最大坡度7‰、惰行初速25 km/h、惰行末速5 km/h條件下,列車的最大惰行距離約為280 m(小于惰行區段的長度)。因此采用RM的列車,無法順利通過分相區。
經了解,國內城市軌道交通行業類似交流牽引供電制式線路,也存在同樣問題,無法在信號系統提供RM模式限速25 km/h運行的情況下,確保列車依靠慣性順利通過分相區。為解決該問題,需要提高分相區內的運行速度,在信號系統既有RM無法調整限速的情況下,應新增“過分相駕駛模式”。僅在識別到分相區時,建立該模式并提供順利通過分相區所需限速對應的超速防護功能。依照本線路坡道、曲線等限制條件,適當考慮司機操作的便利性,本文暫按過分相限速為50 km/h進行技術方案的討論。對于各條線路最終要確定的“過分相駕駛模式”限速,應綜合考慮線路條件及過分相區長度,由設計單位計算后結合現場調試驗證情況最終確定。
3 駕駛模式建議方案
3.1 技術方案
為便于設備維護、降低人員培訓難度、利于備件統一,同時考慮到本線已安裝投用的地面磁感應器、車上讀取設備均經國鐵電氣化鐵路以及城市軌道交通交流牽引供電制式線路大量運用,在信息安全讀取、防止誤讀的可靠性方面已得到長期驗證,因此該方案沿用既有磁感應器型號,通過在鋼軌中間新增單獨讀取設備的方式,避免因信息誤讀帶來的風險。
車輛專業在列車駕駛端對應兩鋼軌中心線轉向架位置新增車上讀取設備,并通過連接線纜與車上讀取主機連接。主機獲取新增設備讀取的信息后立即通過接口將信息發送給車輛及信號系統,用于觸發語音提示,以及建立或退出“過分相駕駛模式”。
按照列車牽引曲線,在確保“合”電標前出口速度不低于5 km/h的情況下,倒推計算列車需要維持50 km/h的線路里程,并在該里程段的起始位置地面兩鋼軌中間新增地面磁感應器。列車同步新增讀取設備,并在讀取信息后對外轉發,由車載信號系統根據收到的信息建立“過分相駕駛模式”,允許列車限速50 km/h運行并防止司機超速。
按照列車牽引曲線,在確保“合”標前出口速度不低于5 km/h情況下,倒推計算需要列車維持25 km/h的線路里程的適當位置(留出司機聽取語音并確保列車運行速度降至不超過25 km/h所需時間對應的列車運行距離),在地面兩鋼軌中間新增地面磁感應器。列車新增設備讀取信息后對外轉發,由車載信號系統根據收到信息退出“過分相駕駛模式”,允許列車限速25 km/h運行并防止司機超速。
為確保安全,車輛信號接口需進行安全設計,應確保列車在RM運行的前提下,僅在讀取到新增地面磁感應器相關信息后,方可建立“過分相駕駛模式”。在讀取到新增地面磁感應器的相關信息,或按“過分相駕駛模式”運行通過分相區所需時長倒計時至0時,系統立即退出“過分相駕駛模式”,恢復RM超速防護功能。同時,為確保列車依靠慣性通過分相區的需要,信號系統提供的“過分相駕駛模式”不會執行低于50 km/h的臨時限速,相應的規章應予以明確。當然,對于既有列車沒有新增“過分相駕駛模式”的情況,人工駕駛列車過分相區時,通過地面磁感應器對應里程時的實際速度也不能低于50 km/h,相關規章應明確調度員不得對分相區設置低于50 km/h的臨時限速要求。
上述方案是結合線路特點設計。對于后續新建線路,牽引供電系統應對分相區的設置位置進行優化:一是分相區的位置要避免設置于線路限速不滿足列車依靠慣性通過的區域;二是線路條件允許情況下,研究將分相區設置于平坡段的可行性。
3.2 運營操作方案
司機操作列車按RM運行時,當列車運行至新增地面磁感應器時,車輛檢測到該地面磁感應器信息后轉發給車載信號系統,同步進行語音播報“前方即將進入分相區,請操作列車以接近且不超過50 km/h限速運行”。車載信號系統收到信息后,自動建立“過分相駕駛模式”,將限速上調至50 km/h,司機按語音提示人工操作將列車運行速度提升至不超過50 km/h,確保列車可以利用慣性正常通過分相區。
當列車依次運行至分相區既有設置的4個地面磁感應器時,語音按正常設計依次提示,車輛牽引系統按既有設計依次斷開、閉合主斷路器。
當列車運行至新增地面磁感應器時,車輛檢測到該磁感應器信息后轉發給車載信號系統,同步進行語音播報“前方即將通過分相區,請操作列車以不超過25 km/h限速運行”。收到信息后,車載信號系統自動退出“過分相駕駛模式”,恢復 RM,司機操作列車按25 km/h限速運行。
3.3 新增設備安裝要求
按照地面磁感應器磁感應強度技術指標,當偏離感應器中心超過200 mm 時,磁感應強度衰減為0。因此在確定新增地面、車上設備安裝位置時,需確保與既有設備之間的距離大于200 mm以上,本線路進一步提高要求,最終確定安裝距離不得小于800 mm。
新增地面磁感應器安裝在兩鋼軌中心線處與既有設備平行(圖3磁感應器1、6),兩條平行線中心點相距1 050 mm,遠大于200 mm,也符合不小于800 mm要求,因此新增設備和既有設備之間不會相互影響。同時,由于本方案要求提升“過分相駕駛模式”超速防護速度,由此確定的新增設備安裝位置與既有設備在線路運行方向上相隔較遠,更需確保不存在安裝空間、磁感應空間的物理重疊。
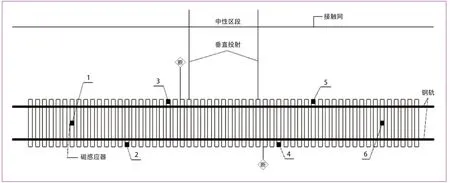
圖3 新增地面磁感應器空間示意圖
新增車載感應器安裝于列車轉向架、車體中心線上,與地面兩鋼軌中心線重合,同理與既有地面設備距離也符合不小于800 mm要求,不會生產磁感應空間的物理重疊。
因此,采用新增地面設備安裝于兩鋼軌中心線的安裝方案,在保證列車安全讀取建立或退出“過分相駕駛模式”信息的同時,也完全避免了該信息會被既有車上讀取設備錯誤獲取的可能。直接選用既有通用設備,完全可以實現相應功能。
對于后續新建線路,可以進一步研究新增地面和車上設備匹配獨立的磁特性參數(與既有設備之間磁特性參數不同)的可能方案,盡可能從最底層實現與既有過分相地面磁感應器相互區分。這樣軌旁設備可以采用與既有設備一致的安裝方案,利用1套車上設備,通過讀取的不同磁特性參數轉換后的信息,用于斷、合主斷路器,或者建立、退出“過分相駕駛模式”。
3.4 風險分析
新增“過分相駕駛模式”提高了超速防護的限速,因此只能在分相區域有效,其余區段須依照既有設計按 RM運行。具體風險點包括段場內運行、正線道岔側向運行、正線小半徑曲線運行等。由于段場運行限速通常較低,本線為25 km/h,若因故錯用過分相駕駛模式,將帶來安全風險。列車在正線限速50 km/h以下線路以及道岔側向運行時,若因故錯用過分相駕駛模式,同樣會帶來安全風險。
4 結束語
針對國內城市軌道交通行業交流牽引供電制式線路,在信號系統 RM 提供限速25 km/h超速防護情況下,普遍存在無法確保列車依靠慣性通過分相區的問題,本文結合相關規范要求對該問題進行了分析,提出采用已有通用設備新增安裝的方案,由車輛、信號系統按照故障-安全原則進行接口設計,信號系統在檢測到列車處于RM的前提下,在讀取到新增地面磁感應器相應信息時建立或退出“過分相駕駛模式”,確保列車可以依靠慣性順利通過分相區的可行方案。按照該方案,在“過分相駕駛模式”有效期間,信號系統提供50 km/h超速防護;在退出“過分相駕駛模式”后,自動恢復 RM,信號系統提供25 km/h超速防護,從而實現超速防護和順利通過分相區的目標兼顧。
本方案雖結合線路特點提出,但對于國內類似交流牽引供電制式線路也可作為參考,具備可推廣、可復制、可直接采用的特點。在此基礎上,建議后續線路采取以下措施:一是設計分相區時,結合線路限速情況對分相區設置區段進行選擇,要避免設置在線路限速不滿足列車依靠慣性通過的區域;二是線路條件即供電設計要求允許的情況下,研究將分相區設置于平坡段的可行性,盡可能利用通用 RM 25 km/h超速保護功能,實現列車依靠慣性通過分相區,避免因新增設備安裝、分相區特殊臨時限速要求給運營、維保帶來的不便;三是研究新增地面磁感應器與車上設備匹配獨立的磁特性參數的可能方案,實現利用既有車上設備讀取地面設備的不同磁特性參數轉換后的信息,控制斷、合主斷路器,或者建立、退出“過分相駕駛模式”。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00
