基于Cruise 對某純電動公交車動力系統匹配與仿真分析
2023-10-24 07:35:36李慧凱
裝備制造技術 2023年8期
李慧凱
(廣西申龍汽車制造有限公司,廣西 南寧 530299)
0 引言
在全球低碳環保、節能減排壓力不斷加大的情況下,能夠完全實現低污染、零排放的純電動客車被國際公認為“最有效的新能源客車解決方案”。電動汽車由于采用電能作為動力源,并采用電機驅動,所以電動汽車在使用場景不會產生排放污染,并且運行時振動噪聲明顯比燃油汽車低很多,而且電動汽車具有良好的操作便利性、維護簡便性、高可靠性等。因電動車所具有的以上優點,純電動公交車在城市客運中已占據主導地位。因此,不同的市場對不同的車型需求日益提高。為降低開發成本,縮短研發周期,縮小研究范圍,尋找新的技術突破口,特別是在技術方案的選擇階段,在動力系統和關鍵零部件的選擇上,依靠高效的計算機對系統和關鍵零部件進行建模、模擬仿真,從而驗證方案是否可行并為后續尋找更優方案打下基礎。
1 純電公交車動力總成參數匹配計算
以廣西申龍HQK6859 型純電動公交車開發為例,根據工程經驗及以往用戶實際使用的需求,在動力總成參數的初步確定上先定驅動電機,然后再合理匹配后橋主減速比、輪胎和動力電池電量以實現車輛兼具良好的動力性與經濟性。
1.1 基本參數及設計要求
電動汽車動力匹配的任務是在滿足整車動力性能要求的基礎上合理選擇動力總成中各部件參數,簡化系統結構,降低車輛故障率和提高續駛里程。本章通過相關計算完成了純電動公交車電機性能參數、動力電池參數及傳動系參數的匹配設計。HQK6859 型純電動公交車是在相似車型的基礎上更換驅動電機,動力系統采用電機直驅的驅動形式,取代老舊車型帶變速箱的驅動形式。其主要包括動力電池、驅動電機、傳動軸、主減速器、輪胎。該公交車的動力總成模型總體方案如圖1 所示。
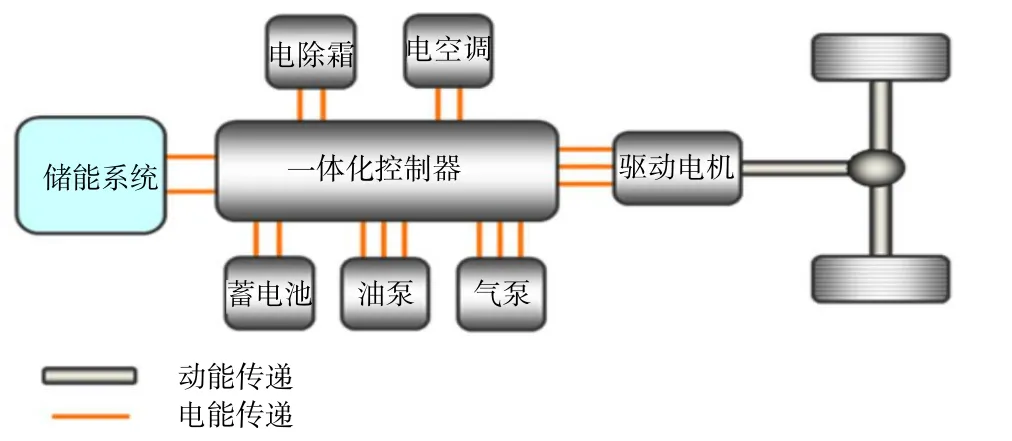
圖1 動力總成模型總體方案
而對于整車的主要技術參數,通過借鑒參考車型得出該車型的主要技術參數及性能指標(表1)。
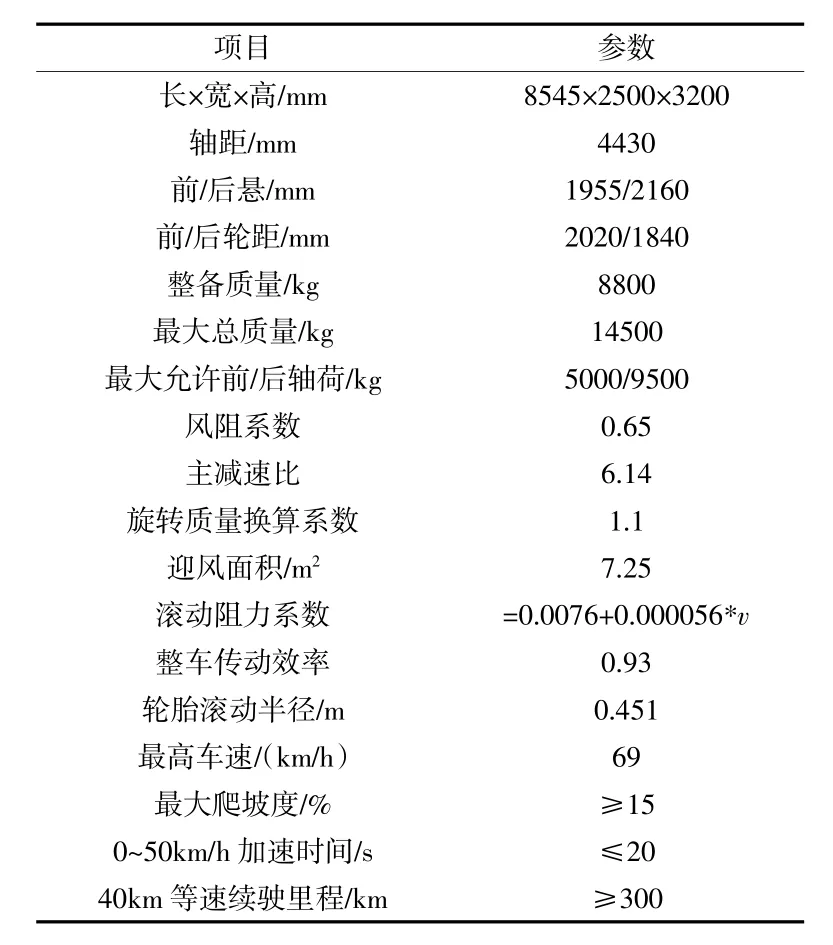
表1 HQK6859 型純電動公交車整車主要技術參數
1.2 驅動電機參數選擇與匹配計算
驅動電機作為電動汽車的動力源,直接影響著電動汽車的動力性和經濟性,城市公交車運行工況復雜,對驅動電機要求能夠頻繁的啟動、停止、加速、減速,低速和爬坡的時候要求轉矩高,高速時轉矩低,并要求寬廣的調速范圍。電機的選型要素通常包括:電機的類型、額定電壓、機械特性、效率、尺寸參數、可靠性和成本等。在基本物理參數定型的基礎上通過匹配驅動系統和電子控制系統使電機工作在最佳的性能區間。
1.2.1 驅動電機的峰值功率和額定功率的確定
驅動電機的峰值功率主要由加速時間和爬陡坡(最大坡度)來確定。
(1)一般所謂汽車的爬坡能力,是指汽車在良好露面上客服滾動阻力與空氣阻力后的余力全部用來克服坡度阻力時能爬上的坡度[1]。由最大爬坡度確定的峰值功率:
式中:ua為車輛爬最大坡時車速,因電機峰值轉矩輸出時間普遍較短特性及城市路況設計8%坡度的坡長≤200 m 標準,該車速定為15 km/h;αmax為陡坡角度。
此時峰值轉矩Ttqmax為:
(2)由加速時間t確定峰值功率Pmax2:
式中:t為加速時間;ut為汽車加速末速度。
電機峰值功率Pmax需同時滿足條件:
(3)最高車速是指在水平良好的路面(混凝土或瀝青)上汽車能達到的最高行駛速度。它是汽車油門全開以最高擋行駛時,汽車車速所能達到的極限值,它不能反映汽車實際行駛過程中的平均車速[4,5]。因此應由車輛最高車速vmax確定額定功率PN:
將表1 中的整車主要技術參數代入上式,計算結果為:Pmax1= 99.98 kW,Pmax2= 70.50 kW,Ttqmax≥1639.12 N·m,PN≥55.44 kW,因此電機峰值功率Pmax≥99.98 kW,峰值轉矩Ttqmax≥1639.12 N·m,額定功率PN≥55.44 kW。
1.2.2 電機的最高工作轉速與額定轉速的確定
由最高車速確定電機的最高工作轉速nmax:
綜合上述計算結果和成本考慮,初步確定的電機參數如表2 所示。
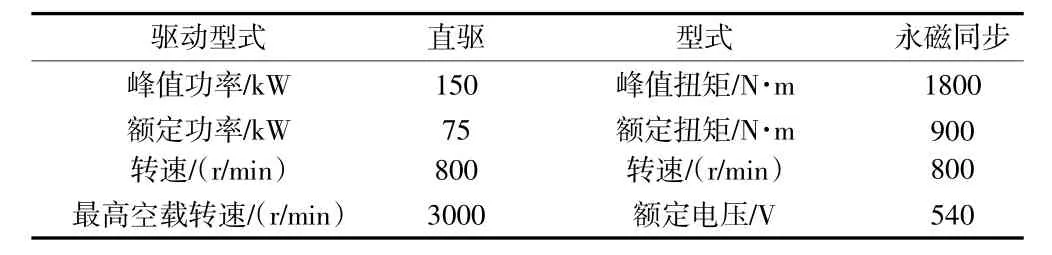
表2 電機基本參數
1.3 動力電池的初步參數選擇
動力電池系統是整車的能量來源,為整車提供驅動電能。電池系統的體積、形狀和技術參數影響電動汽車的生產裝配及行駛性能,是電動汽車的最重要的子系統之一。電動汽車動力電池系統的參數匹配主要包括電池類型的選擇、電池組電壓和能量的選擇。
當車輛以40 km/h 車速在平坦路上勻速行駛時,驅動電機的機械功率P1、輸出扭矩T1及此時電機轉速n1為:
由P1、T1、n1查閱電機對應的效率MAP 數據可知此時電機的轉換效率為95%,結合在整車運行過程中打氣泵、空調、轉向油泵等主要電器能量損耗約占15%,即可供驅動行駛的電能約為85%;且由于動力電池自身的充放電機制,電量的適用范圍為5% ~100%,綜上所述動力電池所需電量為= 204.92 kW·h。因此選用寧德時代8 箱CATLSL-L302G01 型動力電池,關鍵參數見表3。
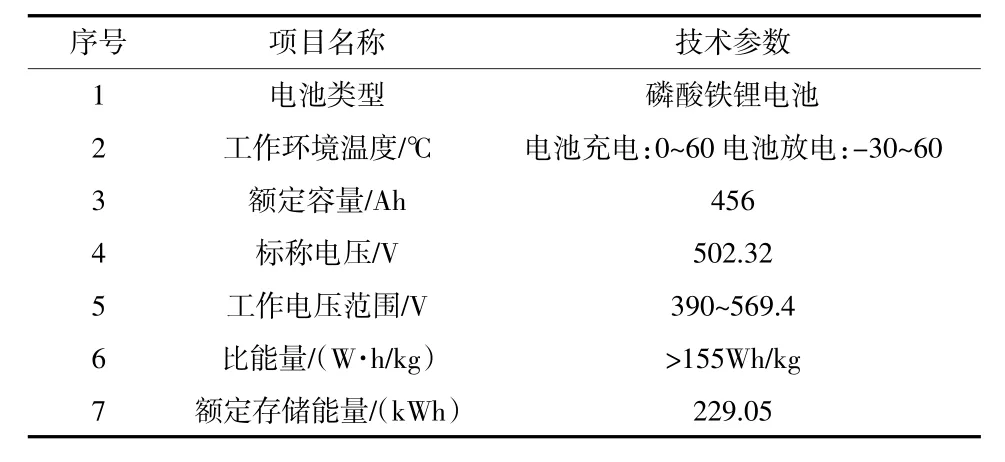
表3 動力電池關鍵參數
2 AVL CRUISE 模型搭建
AVL CRUISE 提供了一種圖形模塊化的交互環境,用戶可以在已有的模塊箱(主要包括Z 整車、離合器、變速箱、發動機、電池、電機、控制器、特殊模塊、輪胎等)中選取合適的模塊拖放到CRUISE 的工作區,即可快捷簡便地建立系統框圖,根據研究的需要添加相應的控制模塊,并正確連接數據總線,建立各模塊之間的聯接,包括機械連接、電氣連接,便可很快得到系統模型。用戶能方便地修改動力傳動系的配置,所以用它來對動力傳動系統建模將是一件非常輕松的事情。各個模塊的仿真參數的設置可以通過Cruise 的參數設置窗口來完成,對一些特性復雜的模塊(如電動機),可以在參數設置窗口通過編輯圖表曲線建立曲線圖來實現參數設置[6]。同時,智能化的駕駛員、駕駛艙模塊設置,可以比較充分地體現駕駛員的實際操作意圖;還有Matlab/simulink 接口模塊,使仿真能完成復雜的邏輯控制。
2.1 搭建整車模型并連接各模塊
以HQK6859 型純電動公交車模型總體方案為基礎,從CRUISE 模型箱中將整車、剎車、差速器、主減、電機、電池、電氣附件、駕駛艙及其他輔助控制等模塊拖至工作區,并對傳動系各模塊進行物理連接。隨后對各模塊之間進行信號連接,該步驟是整個仿真過程的難點之一,需對各模塊之間的信號傳遞及控制邏輯較為深入了解才能正確建立汽車各模塊之間的信號連接,搭建其整車動力系統模型如圖2 所示。
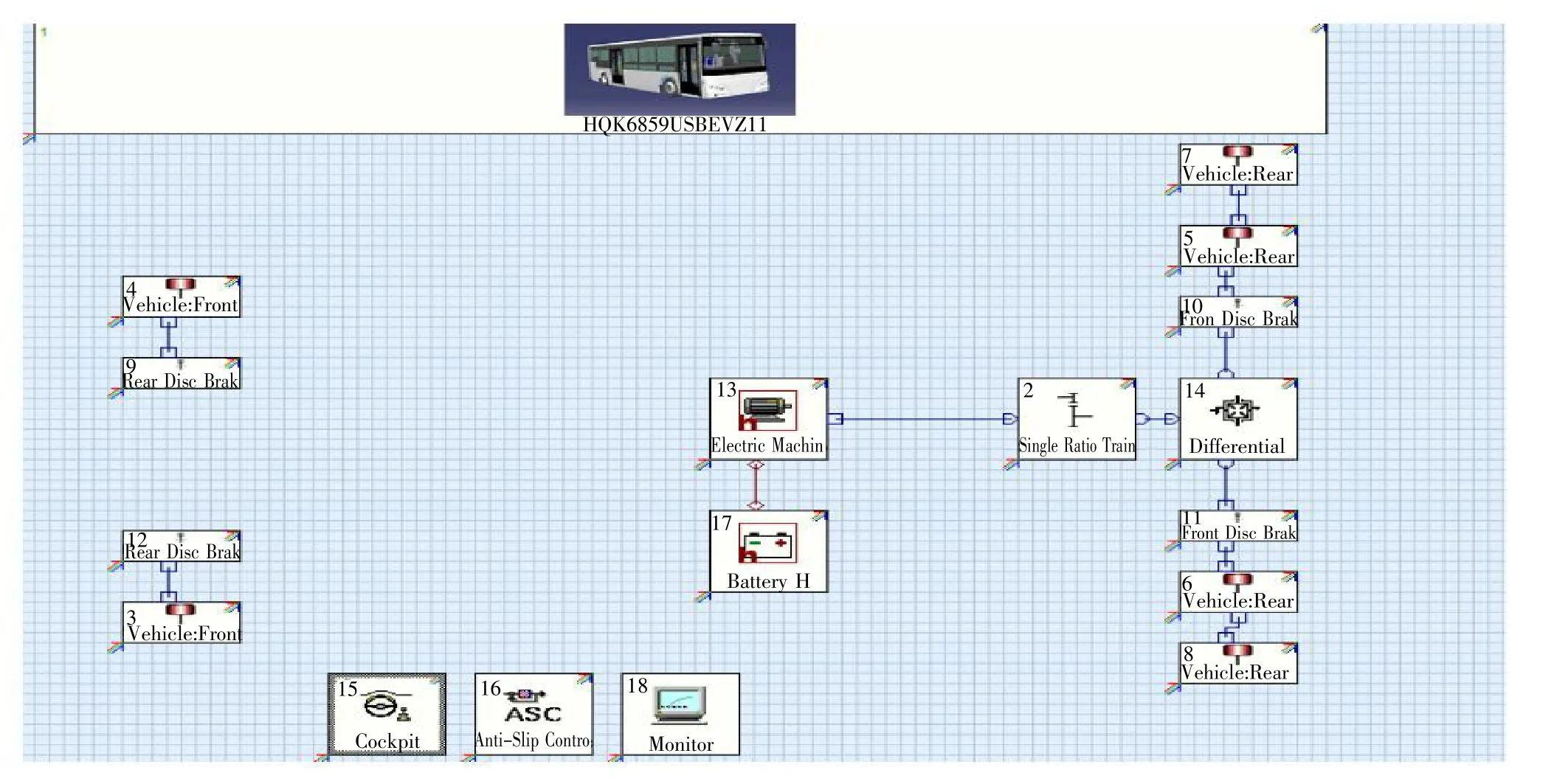
圖2 整車動力系統模型
2.2 各模塊參數輸入
各模塊的參數設置在整個仿真中對結果的準確性尤為重要,這將決定Cruise 仿真模型是否具有參考價值。輪胎、制動器、主減速比等模塊均有比較成熟的數據,可以直接輸入至模塊,動力電池因有高壓盒存在也不用考慮電池單體電壓、容量等參數,電機額定工況、峰值工況下的外特性數據、效率特性數據等可以向電機廠家咨詢獲取;而整車行駛阻力系數則是數據輸入的關鍵點、難點,經驗參數與車輛實際表現的符合程度有待考證,僅在初步理論計算時作為參考。因此特找到換配置前車輛在試驗場的滑行數據,對數據進行除異點、插值平滑初步處理后根據運動學特性按公式(8)[7]計算道路等速行駛阻力。
式中:F為道路等速行駛阻力,N;M為試驗時車輛總質量,kg;ΔV為與車速V的速度偏差,km/h;T為車輛從V+ ΔV減速到V- ΔV所用時間,s。
在Excel 表格中處理滑行數據并進行二次項擬合出整車行駛阻力曲線見圖3。
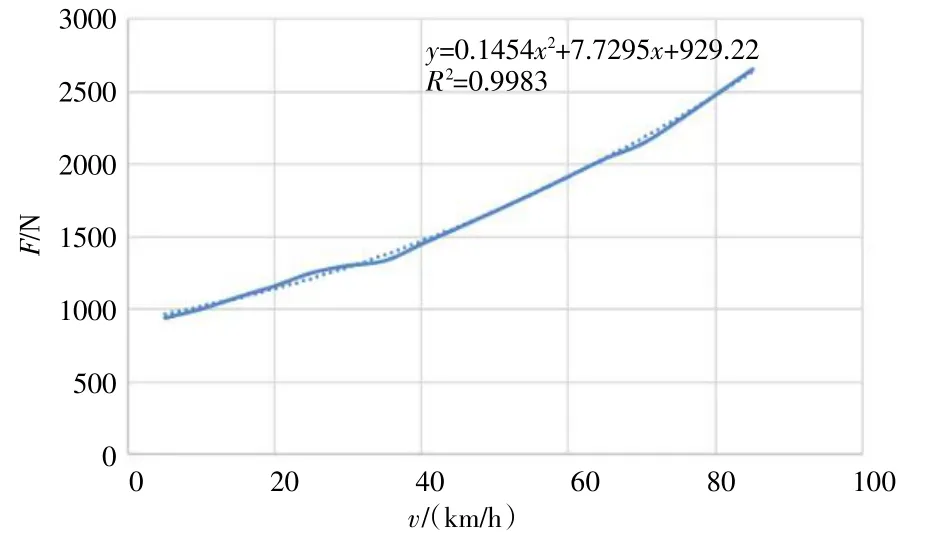
圖3 整車行駛阻力曲線
將擬合出的阻力曲線函數各項系數填入整車模塊中,“Total Driving Resistance→Resistance Function”中,車輛屬性中選擇“Driving Resistance:Function without Reference Vehicle”。
而驅動電機的特性參數輸入也尤為重要,因配有高壓緣故,驅動電機電壓穩定得到保證,電機電壓僅輸入額定電壓540 V 時峰值狀態的MPa 數據,電機外特性及效率如圖4 所示。
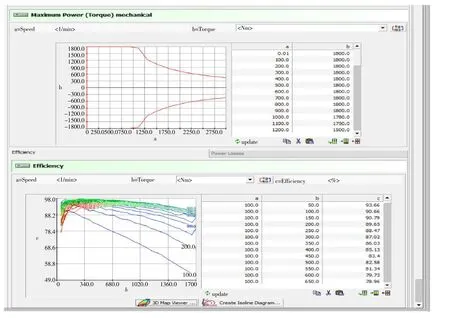
圖4 電機外特性及效率
2.3 設定計算任務
在整車各模塊搭建完成并輸入參數后,即可添加計算任務,根據HQK6859 型純電動公交車的運營特點及仿真要求,添加如下計算任務:
(1)Brake/Coast/Thrust 滑行(65 ~0 km/h)。
(2)Full load Acceleration 全油門加速(0 ~50 km/h)。
(3)Climbing Performance 最大爬坡度。
(4)Constance Drive 最高車速。
(5)Cycle Run 40km/h 等速續航里程。
其中滑行計算是為與車輛試驗場滑行作對比,進一步驗證阻力系數的準確性仿真結果與實際滑行相差較小后方可繼續進行后續計算項目。所有計算道路及駕駛員均選擇標準狀態,等速40 km/h 電耗所選擇Cycle Run 車速設置通過更改“*.pro”文件實現車速控制。
2.4 計算結果
在搭建好車輛架構、填寫好各傳動子部件參數及設定好仿真任務后,在計算中心“Single Calculation”開始計算,計算結果如下。
2.4.1 滑行試驗
計算前先進行滑行試驗,并與道路試驗進行對比,65 ~0 km/h 滑行仿真計算結果為1569.63 m,與道路試驗1560.46 m 相差在可接受范圍之內,因此認為后續仿真計算具有參考價值,滑行試驗計算結果如圖5 所示。
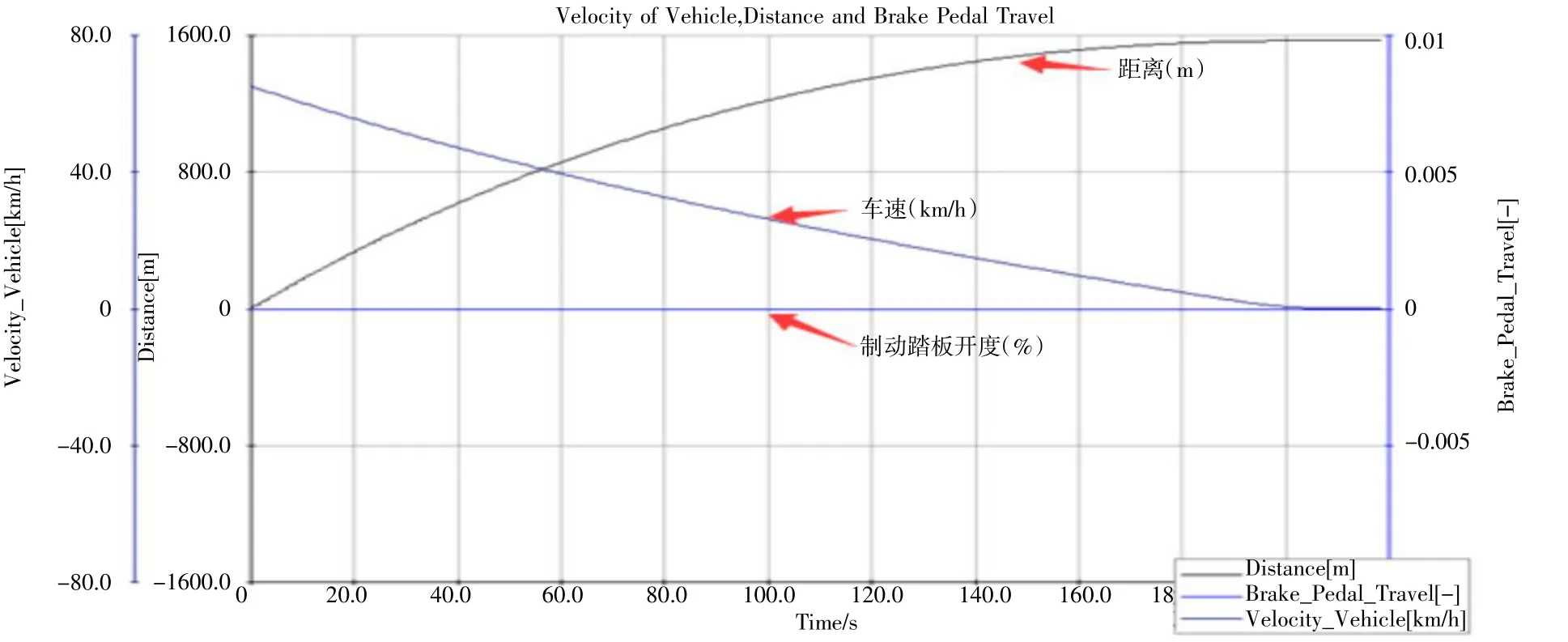
圖5 0~65km/h 滑行試驗計算結果
2.4.2 0~50 km/h 全油門加速
0~50 km/h 全油門加速時間仿真計算結果為11.85 s,滿足小于等于20 s 的設計要求,加速試驗計算結果如圖6 所示。
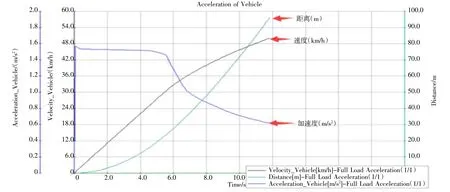
圖6 0~50km/h 全油門加速試驗計算結果
2.4.3 最大爬坡度
最大爬坡度仿真計算結果為15.80%@15 km/h,滿足大于等于15%@15 km/h 的設計要求,最大爬坡度計算結果如圖7 所示。
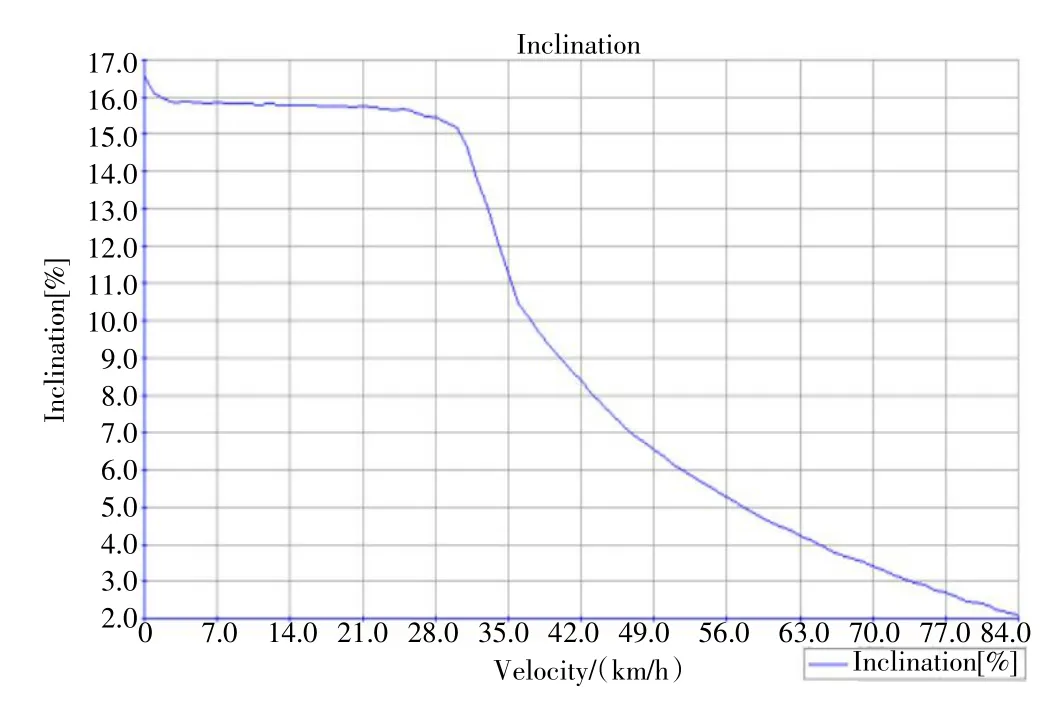
圖7 最大爬坡度試驗計算結果
2.4.4 最高車速
最高車速仿真計算結果為83 km/h,滿足大于等于69 km/h 的設計要求,最高車速計算結果如圖8 所示。

圖8 最高車速試驗計算結果
2.4.5 40 km/h 等速續航里程
40 km/h 等速能耗仿真計算結果如圖9 所示,車速控制在40 km/h,加速至40 km/h 后無加速、減速行為,因此認為試驗運行可信,查詢圖表value 值獲取距離S40(Distance[m])、耗電量E40(Electrical_Consumption[kWh])最終結果,所以該車型40 km/h 等速續航里程D40計算結果為:
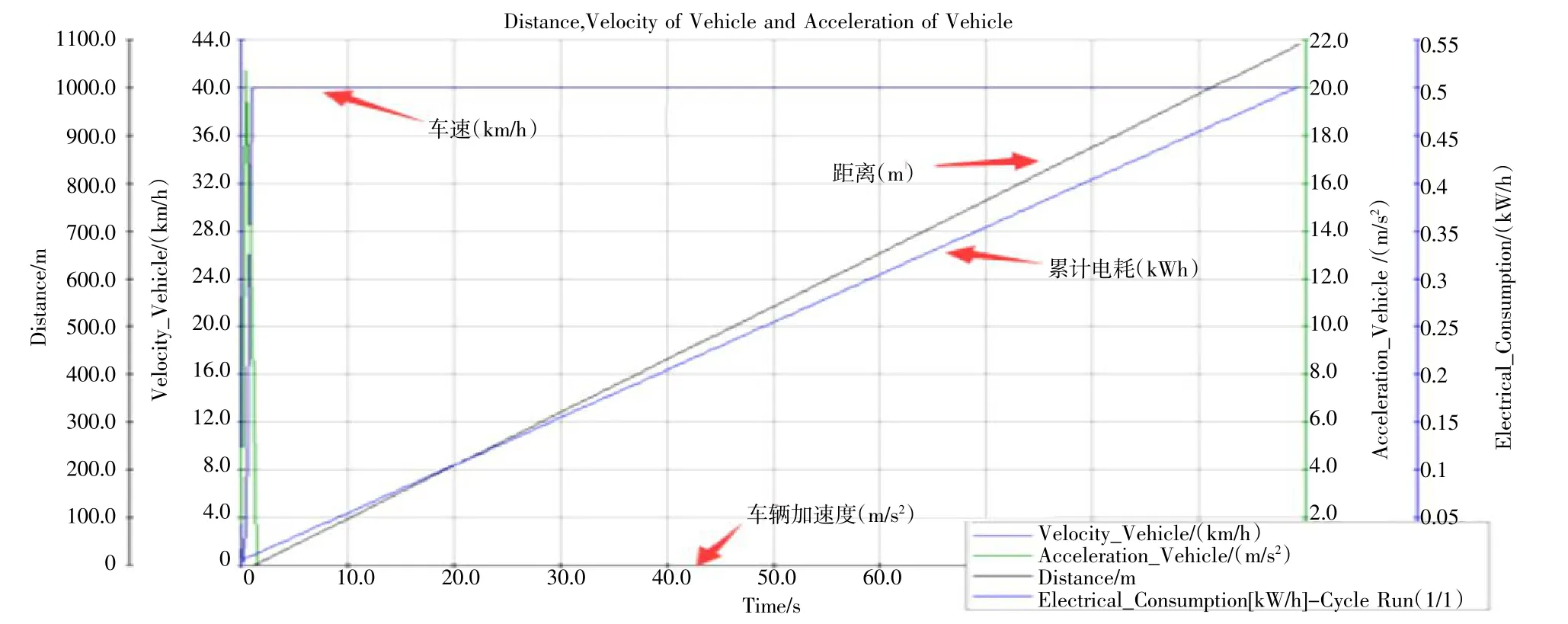
圖9 最高車速試驗計算結果
所以40 km/h 等速續航里程仿真結果滿足大于等于300 km 的設計要求。
3 結語
使用Cruise 軟件對一款變更動力總成的公交車進行建模、仿真分析,通過“40 km/h 等速續航里程”仿真得到該車型常用車速的經濟性指標;通過“最大爬坡度”“最高車速”“0 ~50 km/h 加速”仿真得到該車型的動力性指標,所有仿真計算結果均滿足設計指標要求。該仿真結果與理論計算結果有一定的差異,其根本原因是二者所使用的車輛行駛阻力系數差異所致,其中,理論計算所選用的阻力系數相對較大,這是為了考慮車輛最惡劣、最嚴苛的使用工況,避免車輛在復雜的使用環境中無法滿足使用要求;而仿真計算所使用的阻力系數為相近車型在試驗場性能道上滑行得出,相對可信度較高,而且為整車方案成本考慮,所選擇的電機動力總成方案為供應商成熟方案,且高于設計要求。通過仿真計算分析為后續車型變更動力總成配置、總成參數持續優化提供依據、驗證,提高開發工作效率,降低研發成本。
