基于視覺和UWB融合的室內定位方法研究
2023-10-24 06:33:55張鳳趙昆蔣振偉鄭正奇姚勇俊
互聯網周刊 2023年19期
張鳳 趙昆 蔣振偉 鄭正奇 姚勇俊
摘要:針對目前對室內人員定位的需求,可以通過視覺和UWB融合進行室內定位跟蹤,可以實現視覺跟蹤和UWB定位之間的互補,保證定位的精確性、連續性和穩定性。本文研究一種視覺和UWB融合的室內跟蹤定位系統,利用EPSO算法進行TDOA定位方程組的求解提升定位精度,利用EMOPSO算法優化基站布局,利用yolov5檢測算法提升視覺定位的檢測精度,并建立了多元融合定位系統,通過驗證確定能夠對移動目標進行定位,融合定位系統具有比較高的性能。
關鍵詞:視覺定位;UWB;室內跟蹤定位
引言
室內目標跟蹤定位在近年來得到了廣泛研究,特別在當前背景下,對機器人控制需求確定位置信息、針對室內人員需要加強管理,必須使用精確的室內跟蹤定位技術支持。傳統方式下,一般使用GPS進行人員定位,但是由于室內環境比較復雜,會有墻壁、窗戶等阻擋,GPS信號往往在傳播過程中出現反射、散射等問題,導致信號衰減影響正常的定位。為此,針對室內人員定位發展出了UWB技術和視覺定位技術,都能夠進行目標識別,但是由于技術自身限制,使用單一手段進行室內定位很難獲得良好效果。為此,可以將視覺目標跟蹤和UWB結合,解決視覺定位的漏檢、易受視野盲區影響等問題,也能利用視覺跟蹤彌補UWB的波動問題,通過利用多傳感器融合技術,能建立精準的室內跟蹤定位系統,滿足當前對室內人員跟蹤定位的需求。
1. UWB技術和定位法
1.1 UWB技術
使用GPS技術雖然能夠實現全球導航定位,并且近年來已經具備了較高的精度,但是針對布置環境相對復雜、障礙物多的室內環境,由于信號強度的衰減、反射等原因,很難滿足定位需求。針對目前工作、管理的需要,存在精確室內定位的需求,與RFID、ZigBee、藍牙等技術相比,超寬帶(UWB)技術具備更強的穿透性和抗干擾能力,更適合在室內這種復雜環境中進行定位[1]。
傳統通信會將一個窄帶信號調制到一個高頻載波上,通信信號實際占用的寬帶比較低,UWB技術不以正弦波作為載波,并且發送和接收具有納秒、微秒級以下的極窄脈沖實現無線傳輸,所以占據較寬的頻譜區域。脈沖信號的時間寬帶很短,能夠實現在頻譜上的超寬帶,獲得數百兆的傳輸速率。為了限制UWB對其他無線通信系統的干擾,需要將其頻率范圍控制在3.1~10.6GHz,由于UWB信號利用脈沖信號傳遞信息,所以具有高頻譜范圍和低功率密度的特點。使用UWB技術的功耗更小,由于間歇脈沖的持續時間比較短,而且占空比較低,耗電量相對較小,能夠讓超寬帶定位系統設備設計更加簡單,并且能延長電源供電時間。在脈沖時間比較短的情況下,UWB技術的抗多徑能力更強,信號衰落較少[2]。
1.2 TOA定位方法
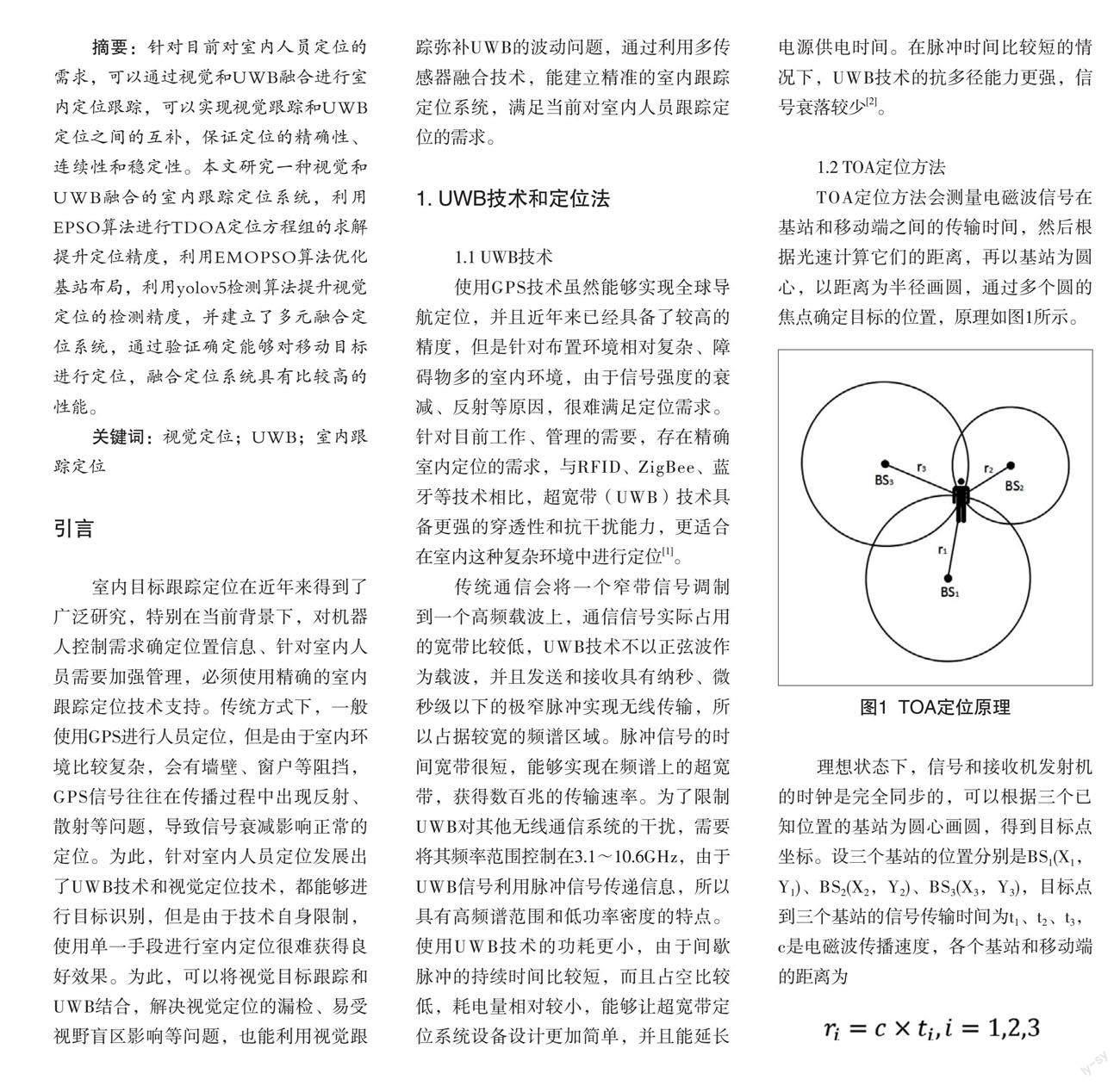
TOA定位方法會測量電磁波信號在基站和移動端之間的傳輸時間,然后根據光速計算它們的距離,再以基站為圓心,以距離為半徑畫圓,通過多個圓的焦點確定目標的位置,原理如圖1所示。
圖1 ?TOA定位原理
理想狀態下,信號和接收機發射機的時鐘是完全同步的,可以根據三個已知位置的基站為圓心畫圓,得到目標點坐標。設三個基站的位置分別是BS1(X1,Y1)、BS2(X2,Y2)、BS3(X3,Y3),目標點到三個基站的信號傳輸時間為t1、t2、t3,c是電磁波傳播速度,各個基站和移動端的距離為
獲得距離信息后,根據圓的性質能夠獲得以下方程組:
方程組整理為矩陣形式:
(x,y)是移動端的位置坐標,使用該方法能夠利用UWB高時間分辨率的特點,并且能在理論上實現厘米級定位。但是在實際應用中,使用該方法需要實現信號接收端和發射端的嚴格時間同步,會導致系統復雜度提升,并且增加功耗,同時在時間同步上實現難度比較大,導致應用過程中會存在一定的誤差,所以只能對具體位置進行估計[3]。
1.3 TDOA定位方法
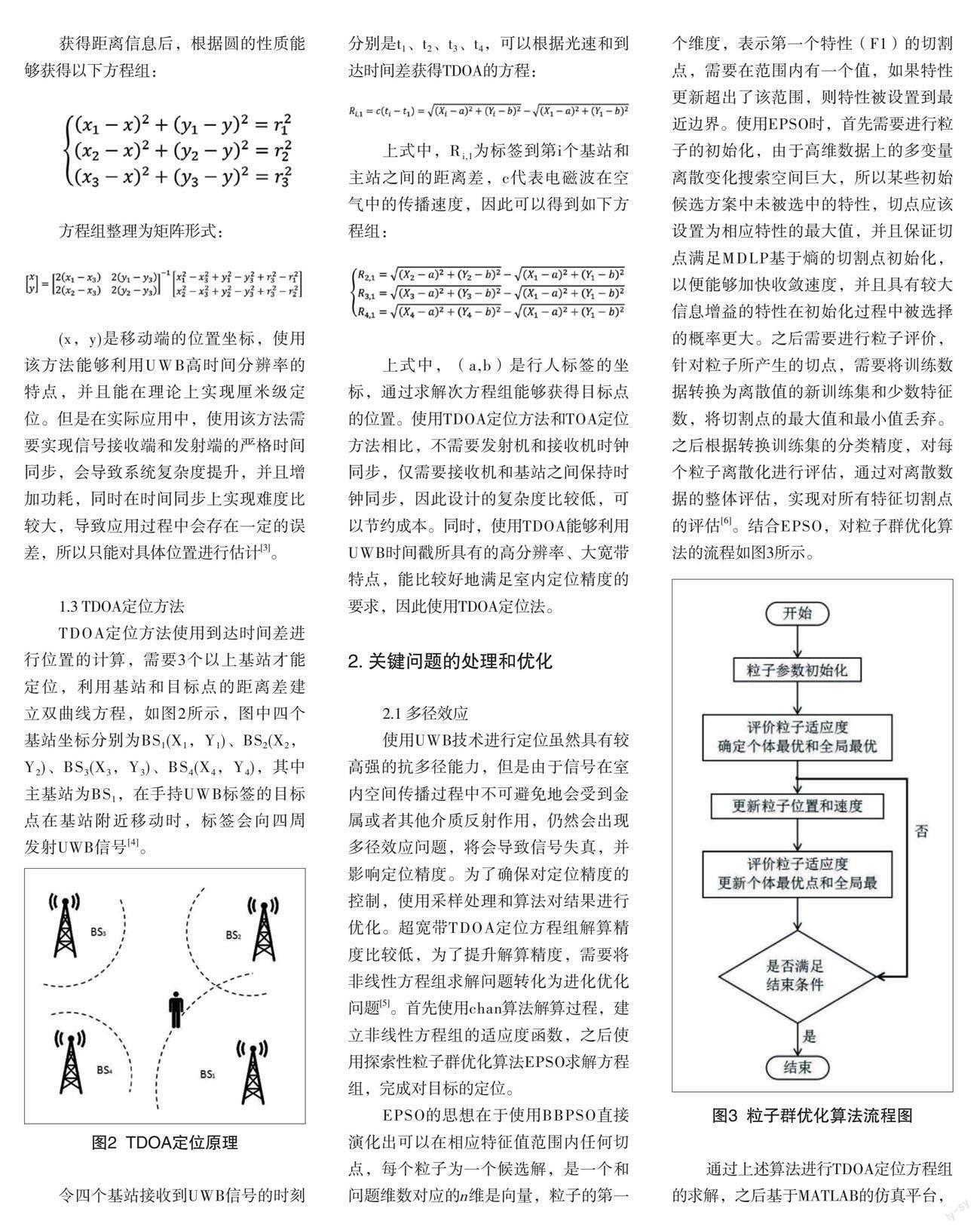
TDOA定位方法使用到達時間差進行位置的計算,需要3個以上基站才能定位,利用基站和目標點的距離差建立雙曲線方程,如圖2所示,圖中四個基站坐標分別為BS1(X1,Y1)、BS2(X2,Y2)、BS3(X3,Y3)、BS4(X4,Y4),其中主基站為BS1,在手持UWB標簽的目標點在基站附近移動時,標簽會向四周發射UWB信號[4]。
圖2 ?TDOA定位原理
令四個基站接收到UWB信號的時刻分別是t1、t2、t3、t4,可以根據光速和到達時間差獲得TDOA的方程:
上式中,Ri,1為標簽到第i個基站和主站之間的距離差,c代表電磁波在空氣中的傳播速度,因此可以得到如下方程組:
上式中,(a,b)是行人標簽的坐標,通過求解次方程組能夠獲得目標點的位置。使用TDOA定位方法和TOA定位方法相比,不需要發射機和接收機時鐘同步,僅需要接收機和基站之間保持時鐘同步,因此設計的復雜度比較低,可以節約成本。同時,使用TDOA能夠利用UWB時間戳所具有的高分辨率、大寬帶特點,能比較好地滿足室內定位精度的要求,因此使用TDOA定位法。
2. 關鍵問題的處理和優化
2.1 多徑效應
使用UWB技術進行定位雖然具有較高強的抗多徑能力,但是由于信號在室內空間傳播過程中不可避免地會受到金屬或者其他介質反射作用,仍然會出現多徑效應問題,將會導致信號失真,并影響定位精度。為了確保對定位精度的控制,使用采樣處理和算法對結果進行優化。超寬帶TDOA定位方程組解算精度比較低,為了提升解算精度,需要將非線性方程組求解問題轉化為進化優化問題[5]。首先使用chan算法解算過程,建立非線性方程組的適應度函數,之后使用探索性粒子群優化算法EPSO求解方程組,完成對目標的定位。
EPSO的思想在于使用BBPSO直接演化出可以在相應特征值范圍內任何切點,每個粒子為一個候選解,是一個和問題維數對應的n維是向量,粒子的第一個維度,表示第一個特性(F1)的切割點,需要在范圍內有一個值,如果特性更新超出了該范圍,則特性被設置到最近邊界。使用EPSO時,首先需要進行粒子的初始化,由于高維數據上的多變量離散變化搜索空間巨大,所以某些初始候選方案中未被選中的特性,切點應該設置為相應特性的最大值,并且保證切點滿足MDLP基于熵的切割點初始化,以便能夠加快收斂速度,并且具有較大信息增益的特性在初始化過程中被選擇的概率更大。之后需要進行粒子評價,針對粒子所產生的切點,需要將訓練數據轉換為離散值的新訓練集和少數特征數,將切割點的最大值和最小值丟棄。之后根據轉換訓練集的分類精度,對每個粒子離散化進行評估,通過對離散數據的整體評估,實現對所有特征切割點的評估[6]。結合EPSO,對粒子群優化算法的流程如圖3所示。
圖3 ?粒子群優化算法流程圖
通過上述算法進行TDOA定位方程組的求解,之后基于MATLAB的仿真平臺,驗證了不同算法下仿真定位點的空間分布規律以及三軸誤差規律。
2.2 多目標優化的超寬帶基站布局
傳感器布設將會影響定位的精度,為提升定位精度,可以增加傳感器的數量,以增加冗余信息,并利用豐富的冗余信息減小定位誤差。但是,增加傳感器意味著設備代價增大,為了能夠控制成本,必須通過合理的布局,以便在最少UWB傳感器數量的情況下達到較好的定位效果。目前傳感器布局并沒有給出最佳方案,為此,提出一種探索型多目標粒子群優化算法(exploratory multi-objective PSO,EMOPSO),進行基站布局模型求解,最后得到最佳方案。
2.3 視覺定位盲區
視覺定位系統會受到盲區和光線的影響,造成目標檢測丟失、視覺漏檢等問題,影響定位的效果和精度。為了解決上述問題并提升檢測精度,使用了Yolov5目標檢測算法和Deepsort目標跟蹤算法,以及利用相機標定和坐標系轉換拓展二維圖像,實現對三維目標的定位和跟蹤。
2.3.1 Yolov5目標檢測算法
Yolov5使用網格概念,將圖像劃分成多個網格,每個網格預測一個或者多個物體,所以每個網格都能產生預測框,網格內存有預測框的模板,每個模板都預設了寬、高、坐標和置信度。訓練過程中,真實人工標注框重點落在網格內,那個網格內的預測框就會生長或者萎縮,如果存在物體,置信度為1,如果沒有物體存在,則置信度為0。
2.3.2 Deepsort目標跟蹤算法
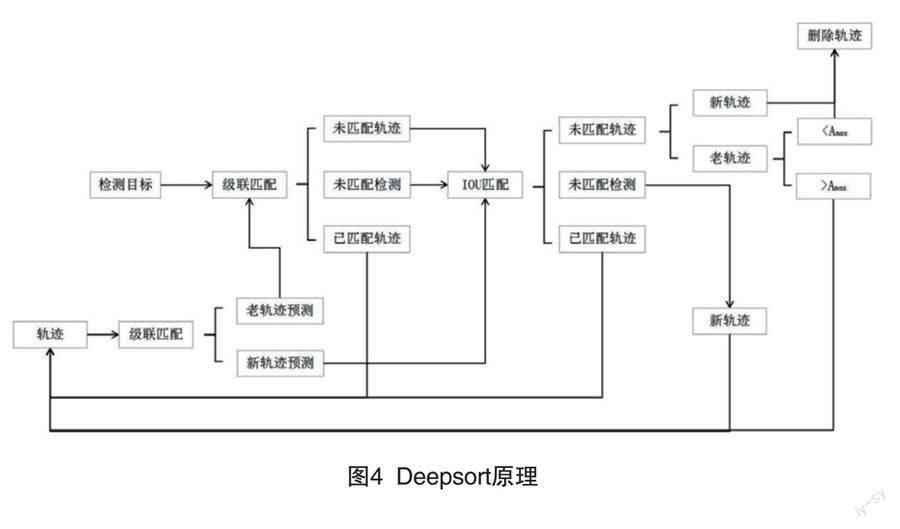
該算法是一種針對檢測多個目標的跟蹤算法,在多目標跟蹤時有較好的表現。在對跟蹤器和檢測目標進行結果匹配時,會結合運動信息和目標的表觀特征,將它們作為同一個目標匹配,同時將檢測框和跟蹤器預測框交并匹配和級聯匹配,能防止目標障礙物被長時間遮擋導致出現跟蹤誤差,因此跟蹤過程中具有更強的魯棒性。圖4為Deepsort的原理圖。
通過使用上述算法,配合相機標定和坐標系轉換拓展,并使用卡爾曼濾波算法融合視覺系統模型以及UWB系統,室內特定目標的定位和跟蹤性能明顯提升,可以較好地滿足精度需求。
2.4 多源融合定位
單獨使用視覺定位或者單獨使用UWB進行室內定位還存在一定的不足,視覺定位會受到相機捕獲范圍限制、盲區的影響,而且很難確定行人的身份;單獨使用UWB在定位過程中容易出現誤差,也容易由于信號不穩定、基站掉電導致基站個數缺失等不穩定問題[7]。為此需要將UWB和視覺定位融合,通過視覺定位彌補UWB的波動問題,以及利用UWB在視覺出現盲區時持續定位,融合方式如圖5所示。
圖5 ?多源融合方法
定位時,需要行人攜帶UWB標簽發出信號,行人會通過標簽獲得唯一身份ID,并且區域定位上方需要安裝單目攝像頭,利用攝像頭實時進行行人的跟蹤拍攝。UWB標簽發射的信號會通過UWB基站發送給后臺服務器進行解算,彈幕攝像頭的畫面會被發送到yolov5網絡模型進行目標檢測,并使用矩形框框定,Deepsort目標跟蹤算法會控制攝像頭跟蹤目標行人,并給行人賦予ID。在UWB和視覺定位都計算出結果,使用歐氏距離進行匹配,在匹配成功后,會將行人視覺定位的行人ID和UWB標簽ID匹配,并對這兩種方法獲得的行人坐標使用卡爾曼濾波融合,獲得最后的輸出坐標。
3. 算法精度實驗
針對10~100米距離下TDOA模型使用chan算法、間接法、EPSO算法的平均定位誤差進行分析。
3.1 實驗環境
為驗證融合性能,在學校走廊環境開展實驗。UWB接收信號基站在走廊里排列,基站之間的間隔為7.5米,無線攝像頭將拍攝到的畫面傳輸到服務器進行處理,UWB基站也會將接收到的信號發送到服務器進行解算,服務器內可以進行UWB數據和視頻數據的處理,進行行人位置定位。行人的真實坐標使用紅外線測距儀進行測量。每隔10米進行一次位置測量,從10米到100米進行10~100米的距離測量實驗,并使用三種算法進行計算。
3.2 實驗結果
實驗結果如圖6所示。
根據圖6的結果,隨著定位點和基站之間距離增大,所有定位算法的平均誤差都在增加,但是使用間接法和EPSO算法的平均定位誤差呈線性增加,而chan算法平均定位誤差呈指數增加。因此EPSO算法和間接法具有較好的定位精度。間接法和EPSO算法對比如圖7所示。
圖7為間接法和EPSO算法的精度對比,通過放大后發現,二者的定位誤差雖然相差較小,但是EPSO算法的定位精度更高,因此使用EPSO算法相對具有更高的定位精度。
結語
使用EPSO算法求解TDOA定位方程組得到的定位誤差相對較小,在定位精度上具有不錯的效果,和視覺定位技術融合,可以獲得更具連續性、穩定性的定位系統。UWB定位和視覺定位之間具有比較良好的互補性,利用視覺定位能夠降低UWB定位的波動性,UWB定位也能給視覺定位的行人提供身份信息,滿足視覺盲區進行定位的需求。所以,建立多元融合定位系統可以在室內定位中獲得比較好的效果,可以提供較為準確的三維位置信息,并實現對人員的跟蹤定位。在具體應用中,還需要使用EPSO算法合理布置基站的布局,以有效控制誤差,提升定位系統的工作效率。
參考文獻:
[1]楊招兵.基于視覺和超寬帶融合的室內跟蹤定位系統[D].上海:上海交通大學,2020.
[2]Hightower J,Borriello G.Location systems for ubiquitous computing[J]. Computer,2001,34(8):57-66.
[3]梁昌業.室內導航融合算法研究與實現[D].成都:電子科技大學,2019.
[4]李玉卿,鮑泓,徐成.單目視覺慣性SLAM與UWB數據融合的精確定位[J].傳感器與微系統,2022,41(9):125-128.
[5]周韋,孫憲坤,吳飛.基于SLAM/UWB的室內融合定位算法研究[J].全球定位系 統,2022,47(1):36-42,85.
[6]曹立波,向國梁,張樂祺,等.一種融合UWB和視覺信息的行人預警方法[J].汽車工程學報,2020,10(4):235-242.
[7]杜美玉,于湉,胡霆豐,等.基于UWB技術的自動跟隨避障系統設計研究[J].電子元器件與信息技術,2020,4(8):62-63,77.
作者簡介:張鳳,碩士研究生,研究方向:UWB定位、智能座艙特性測試。
基金項目:上海市科委資助項目——Science and Technology Commission of Shanghai Municipality (編號:22DZ2229004)。