船舶過(guò)閘智能安檢系統(tǒng)架構(gòu)設(shè)計(jì)
2023-10-24 14:21:46王海江梁鍇趙蒙任鋒
船海工程 2023年5期
王海江,梁鍇,趙蒙,任鋒
(長(zhǎng)江三峽通航管理局,湖北 宜昌 443002)
長(zhǎng)江三峽樞紐段自由長(zhǎng)江廟河至中水門(mén),內(nèi)有三峽和葛洲壩兩大世界級(jí)樞紐,在長(zhǎng)江經(jīng)濟(jì)帶發(fā)展中具有舉足輕重的重要地位,事關(guān)國(guó)家戰(zhàn)略安全、物流通道暢通和沿江百姓民生。為保障過(guò)閘船舶和水利樞紐安全,2018年1月,交通運(yùn)輸部頒布《長(zhǎng)江三峽水利樞紐過(guò)閘船舶安全檢查暫行辦法》,自2018年6月1日起對(duì)過(guò)閘船舶“人船貨”的適航性實(shí)施100%安全檢查。從此,過(guò)閘船舶安檢比例從5%提高到100%,安檢項(xiàng)目從“5+1”拓展到“6+3”,重構(gòu)了三峽通航業(yè)務(wù)流程,調(diào)整了船舶過(guò)壩交通組織環(huán)節(jié),對(duì)過(guò)閘安檢的信息化水平提出了更高要求。
國(guó)外的船舶過(guò)閘安檢工作的開(kāi)展多結(jié)合船型、船齡等客觀數(shù)據(jù)與船舶檢查的缺陷與滯留次數(shù)等因素綜合評(píng)估,得出風(fēng)險(xiǎn)指數(shù),以針對(duì)性調(diào)整安全檢查相關(guān)內(nèi)容,提高安檢效率;國(guó)內(nèi)相關(guān)專(zhuān)家學(xué)者則更多從優(yōu)化安檢待檢錨地水域靠檢基地運(yùn)行方案、建立船舶遠(yuǎn)程申報(bào)系統(tǒng)、過(guò)閘船舶遠(yuǎn)程核驗(yàn)等方面提出安檢優(yōu)化方案與相關(guān)措施[1-4],安檢技術(shù)手段的融合程度較低,船舶過(guò)閘安檢智能化水平有待提高。
1 船舶過(guò)閘智能安檢需求分析
過(guò)閘船舶100%安檢的有效實(shí)施有力保障了三峽水利樞紐和船舶過(guò)壩安全,但隨著過(guò)閘安檢覆蓋范圍的擴(kuò)大,船舶吃水、限高以及船舶證書(shū)驗(yàn)核等相關(guān)相關(guān)信息檢查要求的提高,使得過(guò)閘安檢所需要的人力與時(shí)間成本投入隨之增加。如何在保障過(guò)閘安檢質(zhì)量的前提下,通過(guò)大數(shù)據(jù)、信息化等手段,實(shí)現(xiàn)船舶、船員證書(shū),船舶吃水、限高等主尺度相關(guān)信息的高效、準(zhǔn)確、便捷的查核,實(shí)現(xiàn)智能安檢的目標(biāo),是船舶過(guò)閘安檢初期需要解決的當(dāng)務(wù)之急。
1)移動(dòng)端智能安檢一體化技術(shù)需求。隨著安檢船舶比例及安檢項(xiàng)目的提高,安檢員滿負(fù)荷工作已成常態(tài),平均工作量約16艘船舶/(人·d),單船平均安檢時(shí)長(zhǎng)約為75 min。過(guò)長(zhǎng)的單船安檢時(shí)間,使得船方待閘時(shí)間較長(zhǎng),無(wú)法滿足三峽通航保安、保暢、保穩(wěn)定、保民生的工作要求。亟須在保障安檢質(zhì)量的前提下,通過(guò)開(kāi)發(fā)移動(dòng)端應(yīng)用的形式,實(shí)現(xiàn)證書(shū)等相關(guān)信息的更新、收集、快速融合與準(zhǔn)確核驗(yàn),提高過(guò)閘安檢的信息化、智能化水平。
2)船舶尺度自動(dòng)檢測(cè)預(yù)警技術(shù)需求。船舶吃水、高度和寬度等尺度信息的準(zhǔn)確性是船舶調(diào)度計(jì)劃編制和執(zhí)行的重要依據(jù),船舶謊報(bào)過(guò)閘信息導(dǎo)致超吃水、超高和超寬等違法行為嚴(yán)重威脅通航建筑物安全運(yùn)行。安檢初期,識(shí)別船舶超吃水、超高、超寬情況主要采用人工測(cè)量的方式,存在危險(xiǎn)性高、效率低、勞動(dòng)強(qiáng)度大等問(wèn)題。需要通過(guò)自動(dòng)監(jiān)測(cè)裝置合理使用,實(shí)現(xiàn)對(duì)船舶超吃水、超高、超寬信息的自動(dòng)監(jiān)測(cè)及主動(dòng)預(yù)警,從而提高現(xiàn)場(chǎng)安檢工作的針對(duì)性和準(zhǔn)確性,保障通航安全。
3)船舶和船員信息遠(yuǎn)程核驗(yàn)技術(shù)需求。安檢初期,船舶、船員、載貨等重要信息的核驗(yàn)多依賴(lài)于安檢員登船檢查,雨雪、大霧等惡劣天氣以及疫情防控的要求,對(duì)安檢工作效率和安檢人員人身安全影響較大。需要通過(guò)遠(yuǎn)程安檢、智能識(shí)別的方式,在保障安檢準(zhǔn)確度與檢查效率的前提下,提高船方的過(guò)閘體驗(yàn)。
2 安檢系統(tǒng)架構(gòu)及關(guān)鍵技術(shù)
船舶過(guò)閘安檢智能系統(tǒng)總體思路見(jiàn)圖1。
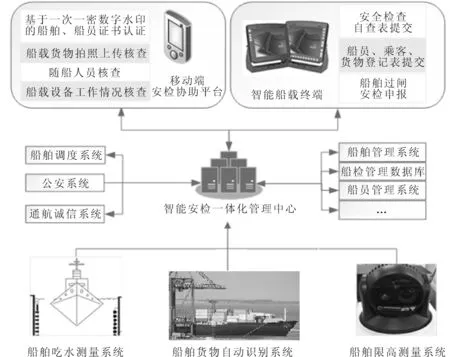
圖1 智能安檢一體化總體架構(gòu)
該方案將船舶吃水自動(dòng)檢測(cè)、船舶限高自動(dòng)測(cè)量、船舶貨物自動(dòng)識(shí)別、安檢智能終端、企業(yè)微信、船舶/船員管理數(shù)據(jù)庫(kù)、公安部數(shù)據(jù)庫(kù)及通航誠(chéng)信等系統(tǒng)在智能安檢管理中心的統(tǒng)一調(diào)配下,進(jìn)行有機(jī)整合,提出遠(yuǎn)程不登船安檢一體化解決方案,其中的多項(xiàng)關(guān)鍵技術(shù)取得了創(chuàng)新性研究成果。
2.1 基于超聲衍射效應(yīng)的側(cè)掃式船舶吃水檢測(cè)系統(tǒng)的核心算法
2.1.1 采樣數(shù)據(jù)的特征提取
系統(tǒng)下位機(jī)根據(jù)A/D采樣結(jié)果的N位數(shù)字信號(hào),在雙口RAM中申請(qǐng)2N個(gè)16位計(jì)數(shù)空間,構(gòu)成2N個(gè)k(采樣數(shù)字信號(hào))-v(數(shù)字信號(hào)復(fù)現(xiàn)次數(shù))映射關(guān)系的映射集合R。
R={(k1,vk1),(k2,vk2),…,(k256,vk256)}
(1)
將采樣信號(hào)通過(guò)基于最小二乘法的曲線擬合進(jìn)行線性回歸分析,得到傳感器工作周期的回歸曲線,求出回歸曲線的數(shù)學(xué)期望μ與標(biāo)準(zhǔn)差σ,并根據(jù)擬合公式導(dǎo)出對(duì)應(yīng)的采樣次數(shù)g(μ),作為后續(xù)計(jì)算的特征參數(shù)。
根據(jù)待定系數(shù)進(jìn)行曲線擬合,最終得到曲線的回歸方程為
ankn+an-1kn-1+…+a1k+a0
(2)
2.1.2 基于特征偏移的深度計(jì)算
通過(guò)統(tǒng)計(jì)船體在不同位置時(shí)的采樣回歸曲線可以看出,當(dāng)有船體遮擋時(shí),回歸曲線的特征參數(shù)期望μ減小,g(μ)增加,標(biāo)準(zhǔn)差σ變小,回歸曲線整體向左偏移。并且船體遮擋深度從淺到深過(guò)程中,μ的整體偏移速度由快到慢最終穩(wěn)定。
基于超聲波衍射現(xiàn)象的原理分析,以及處于不同遮擋位置時(shí)對(duì)應(yīng)分布曲線特征,可以通過(guò)特征參數(shù)μ推導(dǎo)衍射深度計(jì)算公式。基于大量實(shí)驗(yàn)數(shù)據(jù),通過(guò)最小二乘法擬合衍射影響下的遮擋深度與μ的關(guān)系,得到衍射深度計(jì)算公式:Δh=-0.026 42x3+0.315 4x2+8.288x+79.26
最終的吃水檢測(cè)計(jì)算式為
H=Y+X·L+Δh
(3)
式中:H為總的富余水深;Y為第一個(gè)傳感器到船廂底部距離;X為通過(guò)閥值判斷沒(méi)有遮擋的傳感器個(gè)數(shù);L為傳感器間距;Δh為衍射公式計(jì)算的深度值。
2.1.3 基于信號(hào)特征的噪聲的判別與處理
水下噪聲多由于水下雜物、游魚(yú)及氣泡產(chǎn)生,相對(duì)于超聲波輻射區(qū)來(lái)說(shuō),是一個(gè)小型遮擋區(qū),其特性為出現(xiàn)頻率低,且影響時(shí)間短,可以采取沿用上一次檢測(cè)的數(shù)據(jù)來(lái)規(guī)避噪聲帶來(lái)的影響。
在噪聲影響下,水下噪聲的數(shù)據(jù)集合分布散,沒(méi)有特征區(qū)域,此時(shí)函數(shù)曲線整體的g(x)減小,σ變大。通過(guò)設(shè)定g(μ)與σ的判斷門(mén)限M、N,當(dāng)g(μ)小于M,且σ大于N時(shí),可判斷為噪聲數(shù)據(jù),此時(shí)用上一次的運(yùn)算數(shù)據(jù)代替本次數(shù)據(jù)。
2.2 多功能過(guò)閘船舶超高主動(dòng)預(yù)警系統(tǒng)誤差處理
激光測(cè)量系統(tǒng)會(huì)受到多種誤差的影響,有系統(tǒng)誤差和偶然誤差,系統(tǒng)誤差會(huì)給點(diǎn)云坐標(biāo)帶來(lái)系統(tǒng)偏差。
2.2.1 姿態(tài)誤差
姿態(tài)誤差是影響測(cè)量精度的最主要原因,主要包括設(shè)備的安置誤差、水流天氣影響誤差、測(cè)量噪聲等。安裝激光測(cè)量系統(tǒng)要求激光掃描儀參考坐標(biāo)系統(tǒng)慣性平臺(tái)參考坐標(biāo)系的坐標(biāo)軸相互平行,即3個(gè)歐拉角α=β=γ=0,但是系統(tǒng)安裝時(shí)不能完全保證他們互相平行,這就是系統(tǒng)安置誤差。系統(tǒng)安置誤差一般需要檢校,假設(shè)檢校得到的安置旋轉(zhuǎn)矩陣 ΔRM(Δα,Δβ,Δγ)為一個(gè)很小的角度)
ΔRM=R(Δα)R(Δβ)R(Δγ)=
(4)
2.2.2 測(cè)量誤差
激光測(cè)量系統(tǒng)的每一個(gè)工作過(guò)程都會(huì)帶來(lái)一定的誤差,但起主要作用的是電子光學(xué)電路對(duì)經(jīng)過(guò)物體面散射和空間傳播后的不規(guī)則激光回波信號(hào)進(jìn)行處理來(lái)確定時(shí)間延遲帶來(lái)的誤差,分別為時(shí)延估計(jì)誤差和時(shí)間測(cè)量誤差。激光脈沖信號(hào)照射物體時(shí),由于通行船舶的制高點(diǎn)物理特征的不同而產(chǎn)生不同的反射,當(dāng)信號(hào)發(fā)生漫反射時(shí),出現(xiàn)大量反射信號(hào)被接收,會(huì)形成較大的接收噪聲,這在實(shí)際測(cè)量過(guò)程中會(huì)給結(jié)果造成一定的影響。另外,如果在測(cè)量的過(guò)程中,受水流、風(fēng)速等影響,被測(cè)船舶可能會(huì)出現(xiàn)上下或者左右的顛簸,而顛簸的幅度和對(duì)測(cè)量的結(jié)果無(wú)法計(jì)算。因此,要在實(shí)際測(cè)量的過(guò)程中不斷收集數(shù)據(jù),對(duì)誤差數(shù)據(jù)建立回歸數(shù)據(jù)模型,進(jìn)行分析預(yù)測(cè),從而根據(jù)模型的預(yù)測(cè)值結(jié)合實(shí)際值給出正確的測(cè)量結(jié)果。
2.2.3 系統(tǒng)集成誤差
在實(shí)際的系統(tǒng)集成過(guò)程中對(duì)采集來(lái)的數(shù)據(jù)進(jìn)行傳輸、處理、集成時(shí)可能會(huì)產(chǎn)生誤差。這種誤差相對(duì)容易處理,可在軟件集成時(shí)處理。
2.3 一次一密離船安檢遠(yuǎn)程圖像水印校驗(yàn)技術(shù)
2.3.1 數(shù)字水印信息的嵌入
為適應(yīng)圖像在網(wǎng)絡(luò)傳輸中對(duì)圖像的壓縮處理,選擇基于DCT變換域的水印嵌入方式,保證圖像在經(jīng)過(guò)網(wǎng)絡(luò)傳輸中有損壓縮后仍具有良好的魯棒性。運(yùn)用二維DCT,將圖像從空間域轉(zhuǎn)換到DCT變換域,為避免水印圖像的嵌入對(duì)原圖像色彩造成較大的改變,將水印信息嵌入圖像的亮度份量中。水印的嵌入步驟如下。
1)水印圖像預(yù)處理。主要是生成水印圖像和圖像的二值化處理。水印圖像中主要包含用戶(hù)驗(yàn)證密鑰、時(shí)間、地理位置信息,采用二值化圖像即可滿足需求。
2)原圖像預(yù)處理。將原圖像由RGB格式轉(zhuǎn)換為YUV格式,為避免水印嵌入對(duì)圖像色彩的改變選擇將水印信息嵌入亮度分量中。提取Y分量作為水印信息的嵌入層。
3)將原圖像的Y分量分成8×8的子塊,并將每個(gè)字塊進(jìn)行DCT變換,得到對(duì)應(yīng)的系數(shù)矩陣。
4)對(duì)生成的水印圖像同樣進(jìn)行8×8的分塊DCT變換。
5)對(duì)嵌入水印信息后的圖像分塊進(jìn)行逆DCT變換,再將圖像塊進(jìn)行組合并轉(zhuǎn)換成RGB圖像模式便可得到嵌入水印后的圖像。
水印圖像的生成和嵌入的具體流程見(jiàn)圖2。
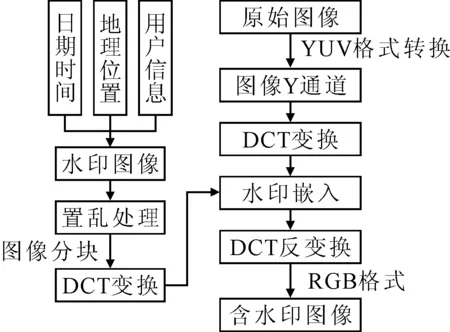
圖2 水印圖像的生成和嵌入流程
2.3.2 數(shù)字水印信息的提取
水印的提取過(guò)程和水印的嵌入過(guò)程是互逆的。
1)將含水印信息的圖像轉(zhuǎn)換成YUV圖像格式,選擇Y通道進(jìn)行8×8子塊劃分。
2)對(duì)各子塊進(jìn)行DCT變換,得到嵌入水印信息的圖像塊。
3)提取出之前系數(shù)值改變過(guò)的像素點(diǎn)后進(jìn)行DCT逆變換,然后進(jìn)行圖像子塊的組合和圖像格式的轉(zhuǎn)換便可以得到之前嵌入到原圖像中的水印信息。
3 測(cè)試驗(yàn)證
將上述研究成果直接應(yīng)用于三峽通航過(guò)閘安檢信息化工程建設(shè),應(yīng)用于樞紐通航安全管理規(guī)范化建設(shè)。主要關(guān)鍵技術(shù)投入使用以來(lái),過(guò)閘安檢主要技術(shù)指標(biāo)與安檢初期相比具有明顯改善。航道寬度70 m時(shí),吃水檢測(cè)精度由±35 cm提高至±10 cm;船舶測(cè)高識(shí)別準(zhǔn)確率由70%提高至100%;船舶測(cè)高識(shí)別精度由±30 cm提高至±10 cm;過(guò)閘船舶安檢合格率由2018年的64.2%提高至2021年98.6%;單船平均安檢時(shí)長(zhǎng)由2018年的75 min提高至2021年的28 min。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
中華手工(2017年2期)2017-06-06 23:00:31
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
中外會(huì)展(2014年4期)2014-11-27 07:46:46
航海(2005年4期)2005-04-29 00:00:00