
基于目標檢測與跟蹤技術的民航限行車輛預警系統設計與研究
2023-10-28 00:11:18夏亞雄萬好
電子產品世界 2023年9期
關鍵詞:深度學習
夏亞雄 萬好


摘要:機場作為面向國際的交通樞紐,不僅為人們提供便捷的出行環境,也彰顯著所在城市的精神面貌,因此機場道路交通管理也愈發受到關注。針對機場交通管理的需求,設計了一套基于目標檢測與跟蹤技術的民航限行車輛預警系統,旨在監測機場道面移動目標的情況,并對監測數據進行統計與呈現,為工作人員提供管理依據與幫助。
關鍵詞:限行車輛;目標檢測;深度學習;機場交通
中圖分類號:U495 文獻標識碼:A
0 引言
隨著機場規模日益擴大,機場轄區內的道路也越來越多,為了確保機場道路交通安全,進一步凈化廣州白云國際機場社會治安環境,保障廣大群眾合法權益,提升旅客出行體驗,維護廣州城市形象,如何對機場各道路上的移動目標情況進行有效監控,成為亟待解決的問題[1]。
在城市交通事故中,自行車、三輪車、摩托車(以下統稱“限行車輛”)等非機動車事故率居高不下,而因機場性質特殊,其道路會長時間處于車流量較大的狀態,如若在機場道路出現上述車輛,不僅影響城市形象,也增加了道路交通安全隱患。因此,迫切需要通過基于目標識別、目標分類等深度學習技術[2] 實現機場主要道路的道面移動目標監測[3],并統計各關鍵區域限行車輛數目[4],通過設定警戒閾值,有效輔助機場交通管理部門對限行車輛進行管理,清除機場道路交通安全隱患[5]。
近年來,深度學習技術快速發展,取得了一系列突破性成果,在某些子領域,深度學習算法的表現甚至超越人類,能有效輔助人們進行工作。因此,本文結合機場道路現有的視頻監控系統,在獲得道路實時監控畫面的前提下,基于目標檢測與跟蹤技術研究機場道面移動目標的檢測與跟蹤系統。對道面車輛進行檢測、識別與分類,實時統計機場重點區域存在的限行車輛數目,為機場交通管理部門提供數據依據;當數量達到警戒閾值時,及時發布預警,消除交通安全隱患,維護機場交通安全與城市形象。
1 系統功能設計
針對機場道面區域,基于目標檢測與跟蹤技術的民航限行車輛預警系統主要功能如下。
1.1 目標(車輛車型)檢測
調研分析機場道路交通常見車輛車型及限行車輛種類,需要檢測的目標包括小汽車(car)、卡車(truck)、公共汽車(bus)、自行車(bicycle)、摩托車(motorbike)、三輪車(tricycle)。得益于深度學習技術的快速發展,近年來基于深度學習的目標檢測算法研究越來越多,其效果也已經大大超越了傳統的目標檢測算法,甚至有不少基于深度學習的目標檢測算法已經應用到了實際的生產環境當中。基于深度學習的目標檢測算法從算法實現的角度可以分為一階段目標檢測算法以及二階段目標檢測算法。
本文主要的檢測對象是車輛,而車輛通常具有比較固定的長寬比,所以采用帶錨點的目標檢測算法能更好地利用車輛形狀信息。除此之外,考慮到限行車輛預警系統會同時監控多路攝像頭錄像,故選擇速度更快的一階段目標檢測算法。
1.2 檢測區域設置
機場公共區域用于交通監控的攝像頭繁多,若對每一路采集到的監控視頻都做車輛監測,無疑會造成計算資源的極大浪費。因此,需要根據機場交通布局將機場劃分為若干區域,然后針對每個區域的出入口進行車輛監測與統計。為了進一步提升算法的時效性,在選定的出入口視頻中,可以通過設置檢測區域有效降低輸入圖像的尺寸,降低計算量,提升計算效率,也為后續的部署提供更具性價比的方案。
1.3 多目標跟蹤與數量統計
為實現機場各區域限行車輛的數量統計,需要判別車輛在各區域的進出情況,僅采用車輛車型檢測顯然無法滿足需求。因此,本系統引入多目標跟蹤算法,對檢測區域范圍內的車輛進行跟蹤,并通過劃定進出車道線的方式,輔助判斷車輛在各區域的進出情況,為車輛的數量統計提供依據。
2 系統搭建
2.1 技術方案設計
本系統的技術研究主要是基于深度學習技術,對機場道路上的移動目標進行檢測與跟蹤,通過識別與分類實現對限行車輛的實時監測,從而實現對機場各區域限行車輛數目的實時統計。可以將其抽象理解為車輛監控問題,而車輛監控問題的解決方案是目標檢測加目標跟蹤。目標檢測用于發現、定位當前處理圖片中存在的目標車輛,而目標跟蹤則是結合當前圖片的目標檢測信息,計算出每一個目標在視頻流中的運動情況。
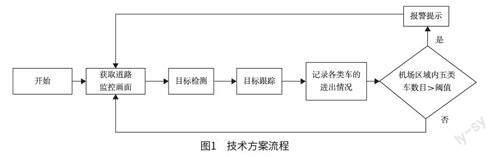
如圖1 所示,本系統的技術方案流程如下。
(1)獲取道路監控畫面作為系統的輸入。
(2)使用目標檢測算法檢測出圖片中的目標車輛,并記錄其類別及坐標。
(3)結合當前幀的目標檢測信息和上一幀圖片的檢測信息,對當前幀的目標車輛進行跟蹤,并分析其運動狀態。
(4)根據當前幀車輛的運動狀態、位置信息和歷史信息,再結合目標車輛是否跨越機場重點區域以及其進出車道線的方式,判別所跟蹤的目標車輛進出機場區域的狀態。
(5)統計機場道面重點區域內目標車輛的種類及數量,及時識別并統計限制車輛的數目,如數量大于設定的警戒閾值,則向機場交通管理部門主動預警。
2.2 系統功能模塊
2.2.1 車輛車型檢測
針對機場區域常見車型car、truck、bus、bicycle、motorbike、tricycle 進行訓練,在輸入的監控視頻中監測出現的車輛并對其車型進行分類。為了能更好地展示本系統的工作成果,制作了一個圖形用戶界面(GUI)進行演示,如圖2 所示。
圖2 中,本系統能夠正確對機場各個視角下出現的車輛進行檢測與分類,為后續車輛進出機場重點區域的判別奠定了基礎。
2.2.2 監測區域設置
為了提升系統的運行效率,可通過設定檢測區域來控制輸入系統圖片的數據量。主要采用以點連線的方式,通過依次點擊畫面,畫出一個多邊形,以多邊形的最小外接矩形作為檢測區域,將其設置在輸入視頻的第一幀中,如圖3 所示。這樣系統在處理這一路視頻圖片時,只需要處理矩形框區域即可,極大地減少了所需處理的數據量,提升了系統處理效率,有效降低了硬件成本。
2.2.3 車輛出入判別與數量統計
為了更好地判別系統所監測的車輛進出情況,在劃定的檢測區域范圍內,設定車輛進出虛擬線圈,如圖4 所示。
圖4 中,左側虛線為設定的進入機場區域虛擬線圈,右側虛線為離開機場區域虛擬線圈。機場各區域的現存車輛將通過各區域出入口的進出車輛數據進行統計,統計區域如圖5 所示。
圖5 中,左下角方框內為各類車輛進出機場區域的情況,右下角方框內為功能按鈕,從上往下分別是選擇視頻文件、設置檢測區域、開始運行。
2.3 系統界面
基于上述系統功能,制定系統界面,如圖6所示。
當目標車輛進入圖中矩形框檢測區域,就會被系統的車輛監測算法檢測出來,當出機場的車輛經過離開機場區域虛擬線圈,相應的車輛類型出機場數加一,反之亦然。機場各區域現存各車型車輛數量可以由進出差值計算得出,限行車輛數可由各限行車輛種類的現存數之和得出,其超過預定閾值時會發出預警。
3 結論
本文研究設計了一套基于目標檢測與跟蹤技術的民航限行車輛預警系統,利用機場公共區域道路交通監控視頻,實現對機場各劃定區域的車輛實時監測并對限行車輛進行數量統計,可為機場交通管理部門提供數據支撐與監管輔助,及時提醒限行車輛到達警戒閾值,協同執法部門處理隱患,為人們提供更加便捷安全的出行環境。
參考文獻
[1] 胡亞光,歐陽杰,張兆寬. 樞紐機場陸側交通協同化管理系統分析與框架概述[C]// 第十五屆中國智能交通年會學術委員會. 第十五屆中國智能交通年會科技論文集. 北京:電子工業出版社,2020:452-461.
[2] 萬良昊. 基于深度學習的多場景車輛檢測系統設計與實現[D]. 武漢:華中科技大學,2018.
[3] 陳熊. 基于機器視覺的車輛檢測方法研究[D]. 成都:電子科技大學,2016.
[4] 孫曉瑤,田波,王秋生,等. 輪跡分布與車型分類檢測系統設計與實現[J]. 工業計量,2012,22(2):9-12.
[5] 蔡長. 一種可車型分類的道路交通流檢測系統研究與設計[J]. 公路工程, 2009,34(6):30-33.
猜你喜歡
中國教育技術裝備(2016年19期)2016-12-27 19:23:52
中國遠程教育(2016年11期)2016-12-27 18:07:31
現代商貿工業(2016年25期)2016-12-26 09:58:02
江蘇教育·中學教學版(2016年11期)2016-12-21 11:45:08
江蘇教育·中學教學版(2016年11期)2016-12-21 11:36:29
現代情報(2016年10期)2016-12-15 11:50:53
考試周刊(2016年94期)2016-12-12 12:15:04
新教育時代·教師版(2016年23期)2016-12-06 06:02:38
法制與社會(2016年32期)2016-12-01 15:25:53
軟件導刊(2016年9期)2016-11-07 22:20:49
