基于人工智能計算機視覺算法的道路標志牌檢測方法及裝置研究
2023-10-30 00:37:40胡景邦王少彥
科海故事博覽 2023年28期
胡景邦,王少彥
(惠州市博實結科技有限公司,廣東 惠州 516000)
實現對道路標志牌的快速、準確的檢測和識別成為現代交通技術研究的一個重要課題。為了解決現有技術存在的問題,本研究提出了一種基于人工智能計算機視覺算法的道路標志牌檢測方法及裝置。該方法通過車載終端配備間歇性光源和攝像頭,利用幀差計算、圖像有效區域確定、圖像目標分割和目標識別等關鍵步驟,實現了對道路標志牌的高效檢測和識別。與傳統方法相比,本方法兼具高準確性和實時性,同時優化了計算效率,能夠在嵌入式車載終端設備上實時運行。
1 研究背景
傳統的道路標志牌檢測方法主要依賴于高精度地圖或者V2X 技術,但這些方法存在一些限制。高精度地圖需要事先收集并維護龐大的數據,不僅成本高昂,而且難以適應道路環境的快速變化。而V2X 技術雖然可以實時獲取道路信息,但對于部分無網絡覆蓋或網絡信號不穩定的情況下,其可靠性和實時性存在一定風險。
目前現有的道路標志牌檢測技術主要可以分為兩類:基于圖像處理與傳統機器學習的方法以及基于深度學習的方法。傳統的圖像處理與機器學習方法對圖像進行預處理和特征提取,然后采用分類器進行標志牌的識別。
然而,這類方法往往需要手動設計特征,且在復雜道路環境下,特征的提取和分類器的訓練面臨挑戰,導致識別準確率不高,且對圖像的實時處理能力有限。
另一類基于深度學習的方法,如YOLO 和SSD 等,通過神經網絡自動學習特征并實現目標檢測。這類方法的準確性相對較高,但同時也帶來了計算量大、運算速度慢等問題。在車載終端等資源有限的設備上,深度學習模型的實時性難以得到保證[1]。
2 研究方法與步驟
2.1 設備配置
在本研究中,致力于開發一種高效的道路標志牌檢測方法及裝置,以滿足自動駕駛技術的需求,提升交通安全水平,并為智能交通系統的應用做出貢獻。為了實現這一目標,在車載終端上進行了精心的設備配置,包括間歇性光源和攝像頭的配置,具體步驟見圖1。
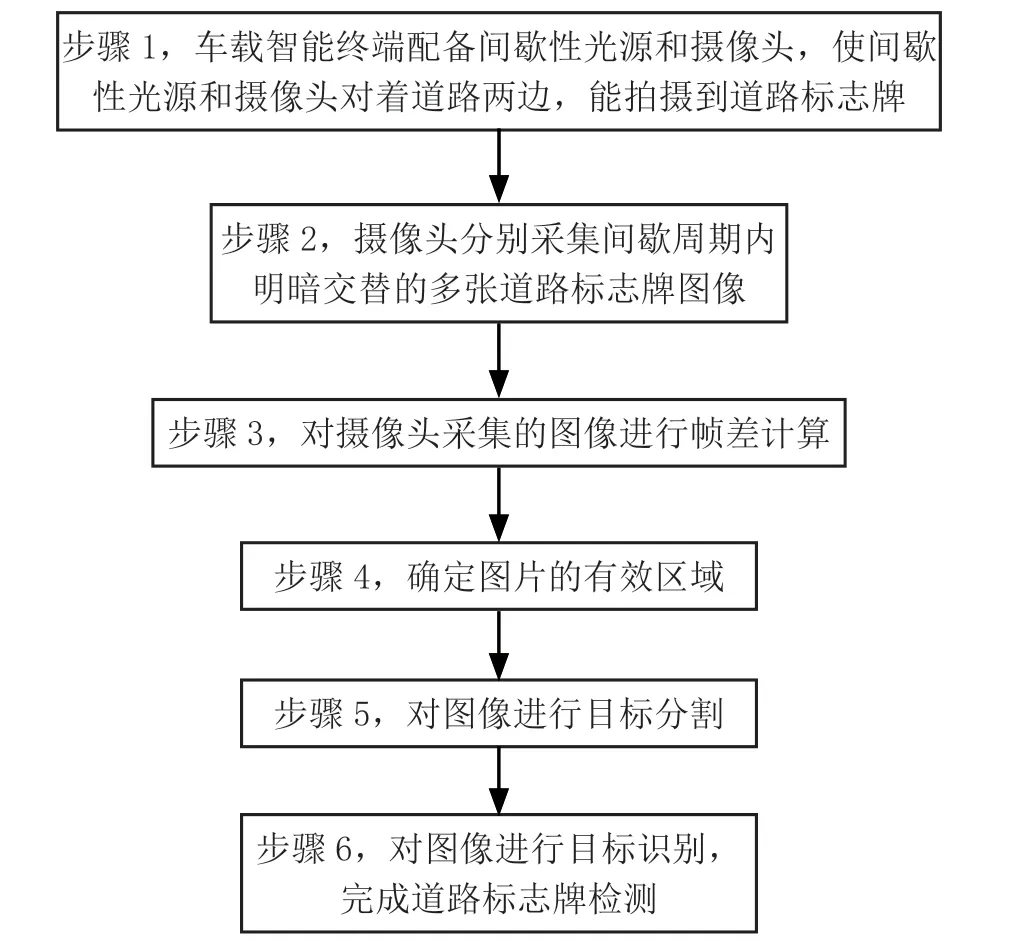
圖1 道路標志牌檢測方法
首先,在車載終端上配備了間歇性光源。這些光源被巧妙地設置在車載終端的兩側,確保其與攝像頭對準道路兩邊。這樣的布置使得攝像頭能夠在不同角度和位置捕捉到道路標志牌的圖像。間歇性光源在預定的時間間隔內工作,交替地開啟和關閉。光源開啟時,能夠產生針對道路標志牌的照明效果,為圖像采集提供更好的條件。
其次,還配備了高質量的攝像頭。這些攝像頭能夠在車輛行駛過程中,準確地采集間歇周期內明暗交替的多張道路標志牌圖像。由于道路標志牌在不同時間段內會出現明暗交替的特點,攝像頭的高性能確保獲取到豐富多樣的圖像數據,為后續的目標識別提供強有力的基礎[2]。
2.2 圖像采集
在研究中,攝像頭是道路標志牌檢測的重要組成部分。為了獲取豐富多樣的道路標志牌圖像數據,設置了攝像頭在預先設定的間歇周期內進行圖像采集。這樣的設置有助于捕捉不同時間段內道路標志牌的明暗交替特性,從而增加圖像數據的多樣性,提高檢測的準確性和魯棒性[3]。
在間歇周期內,攝像頭以固定的時間間隔連續地拍攝多張圖像。這些圖像涵蓋了不同時間點的道路標志牌,因而呈現出明暗交替的變化。這種明暗交替特性在實際道路條件下普遍存在,例如在白天和夜晚,或者在不同路段的照明情況下,道路標志牌的亮度會有所不同。通過采集這樣多樣化的圖像數據,能夠更好地模擬實際道路環境,提高算法對各種情況下的適應性。
為了確保圖像采集的準確性和穩定性,對攝像頭進行了精心選擇和優化,以滿足道路標志牌檢測的要求。攝像頭的高質量性能能夠確保圖像的清晰度和色彩還原度,為后續的圖像處理和目標識別提供可靠的數據支持。
通過攝像頭采集間歇周期內明暗交替的多張道路標志牌圖像,能夠獲得高質量的圖像數據集,為道路標志牌檢測算法的訓練和優化提供了堅實的基礎。這一步驟的精心設計和執行為研究奠定了良好的數據基礎,使得能夠更加準確地進行圖像處理和目標識別,進一步推進道路交通安全技術的發展。
2.3 幀差計算
幀差計算是道路標志牌檢測方法中的重要步驟之一。通過對相鄰時刻攝像頭采集的圖像進行處理,可以得到相鄰圖像之間的差異,從而確定道路標志牌的位置。
在幀差計算過程中,首先選擇兩個相鄰時刻的圖像,分別記為I(t)和I(t-T),其中t 代表當前時刻,T 表示時間間隔。接著,將這兩個圖像進行相減操作,得到幀差圖像Idiff(t)。幀差圖像反映了相鄰圖像之間的變化情況,其中的像素值表示相應位置上的亮度差異。
通過幀差圖像,可以迅速捕捉到發生變化的區域,即道路標志牌所在的位置。當攝像頭采集到圖像時,如果道路標志牌出現或消失,其圖像會出現明顯的變化,這種變化會在幀差圖像中呈現出明顯的高亮度或低亮度的像素。因此,幀差計算能夠幫助快速定位道路標志牌的位置,減少不必要的圖像處理和計算,提高檢測效率。
在幀差計算過程中,還可以根據實際情況設定閾值,對幀差圖像進行二值化處理,進一步突出道路標志牌的位置。通過適當地調整閾值,能夠過濾掉圖像中的噪聲和干擾,使得目標標志牌在圖像中更加明顯和突出,便于后續的目標分割和識別過程[4]。
2.4 圖像有效區域確定
在道路標志牌檢測方法中,圖像的有效區域確定是為了進一步優化檢測過程,聚焦在可能存在標志牌的區域,減少不必要的計算,從而提高檢測效率和準確性。為此,采用了圖像掩碼技術,通過選定合適的閾值,將圖像中不感興趣的區域標記為掩碼“0”,而將可能存在標志牌的區域標記為掩碼“1”。
首先,設定閾值th0,該閾值的選擇可以根據實際情況和需求進行調整。然后,根據閾值th0 對幀差圖像進行二值化處理,得到二值化圖像。在二值化圖像中,像素值為1 代表可能存在標志牌的區域,而像素值為0則代表其他不感興趣的區域。
其次,將二值化圖像與原始圖像進行按位與運算,得到圖像的掩碼區域。通過這個掩碼區域,可以快速確定圖像的有效區域,即可能存在標志牌的區域。這樣一來,在后續的圖像處理和目標識別過程中,可以將注意力集中在圖像的有效區域上,避免對整個圖像進行處理,從而減少了不必要的計算開銷,提高了檢測效率。
圖像有效區域確定的過程是基于幀差計算的結果,因為幀差圖像中聚集了圖像發生明顯變化的區域,而這些區域往往是可能存在道路標志牌的區域。通過合理地設置閾值和利用掩碼技術,能夠精確地定位到這些區域,并將其作為圖像的有效區域,為接下來的目標分割和識別提供更加精準的輸入。
2.5 圖像目標分割
1.將圖像根據掩碼“1”分割成若干待識別目標的子圖像。
2.根據目標尺寸進行過濾,刪除過大及過小的目標。
通過圖像目標分割,將攝像頭采集的圖像根據掩碼“1”分割成多個待識別的目標子圖像。然后,根據目標的尺寸進行過濾,刪除過大和過小的目標,以保留可能是道路標志牌的候選目標。
2.6 圖像目標識別
1.采集樣本:從攝像頭采集的圖像中裁剪得到各種類型的道路標志牌。
2.標注樣本:標注出不同道路標志牌的類別。
3.訓練樣本:選擇合適的深度學習模型,通過一系列卷積、池化、激活函數、歸一化、分類運算訓練得到深度學習模型。
4.用訓練好的深度學習模型對子圖像進行識別,得到道路標志牌的分類。
在圖像目標識別階段,采集樣本并裁剪出不同類型的道路標志牌圖像,然后標注出標志牌的類別。接著,選擇合適的深度學習模型,進行訓練,訓練好的模型能夠對子圖像進行識別,得到道路標志牌的分類結果。
通過以上研究方法與步驟,能夠有效地實現基于人工智能計算機視覺算法的道路標志牌檢測方法及裝置。這將為道路交通安全提供有力的技術支持,為自動駕駛技術的發展和智能交通系統的應用奠定基礎。
3 實驗驗證與結果
3.1 實驗設置
為了驗證道路標志牌檢測方法的有效性和性能優勢,進行了一系列實驗,并在不同場景下采集了道路標志牌圖像數據。以下是實驗的主要設置:
1.實驗設備:使用了配備間歇性光源和攝像頭的車載終端設備進行圖像采集和處理。
2.實驗數據采集:在現實道路場景中,通過車載終端設備采集了多組道路標志牌圖像,包括不同類型的道路標志和不同環境條件下的圖像。這些圖像包含了晝間和夜間、不同天氣條件(如晴天、雨天)下的道路標志牌,以模擬實際應用場景的多樣性。
3.實驗方法:按照之前描述的步驟對采集到的圖像數據進行處理,包括圖像采集、幀差計算、圖像有效區域確定、圖像目標分割和目標識別等。
3.2 實驗數據分析與結果展示
經過實驗驗證,得出了以下結果:
1.準確性和實時性:通過與現有道路標志牌檢測技術進行對比,方法在道路標志牌的準確性方面表現出色。同時,由于優化了計算效率,方法在嵌入式車載終端設備上能夠實時運行,滿足實際應用的要求。
2.復雜場景適應性:在復雜的道路環境中,例如在夜間或雨天等惡劣條件下,道路標志牌檢測方法仍然能夠穩定運行并保持較高的準確性。
3.多類標志牌檢測:方法可以有效地檢測多種類型的道路標志牌,包括限速標志、禁止標志、警告標志等,表現出良好的通用性。
4.圖像處理效率:通過圖像有效區域的確定,成功減少了不必要的計算開銷,提高了圖像處理的效率,使得整個道路標志牌檢測過程更加快速和精確。
5.實驗數據展示:將在實驗報告中展示實驗結果的定量和定性分析,包括圖像處理前后的效果對比、檢測準確率和召回率等評估指標的統計結果。
4 結語
總體而言,實驗驗證結果表明,基于人工智能計算機視覺算法的道路標志牌檢測方法在各種場景下都表現出了有效性和性能優勢,為道路交通安全和自動駕駛技術的發展提供了可靠的支持。這些結果將為進一步推進道路標志牌檢測技術的發展和應用奠定基礎,并在實際交通應用中發揮重要作用。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52