基于螢火蟲算法的DDE-PID加熱爐爐溫控制
2023-10-30 02:51:40馮旭剛章義忠王正兵宋愛(ài)國(guó)李通沈浩王璐宋瀾波
馮旭剛,章義忠,王正兵,宋愛(ài)國(guó),李通,沈浩,王璐,宋瀾波
(1.安徽工業(yè)大學(xué) 電氣與信息工程學(xué)院,安徽 馬鞍山,243032;2.東南大學(xué) 儀器科學(xué)與工程學(xué)院,江蘇 南京,210096;3.寶武馬鋼集團(tuán)技術(shù)改造部,安徽 馬鞍山,243003;4.安徽工業(yè)大學(xué) 工程研究院,安徽 馬鞍山,243002;5.湖南華菱漣源鋼鐵有限公司,湖南 婁底,417009)
爐溫是加熱爐運(yùn)行過(guò)程中主要被控量之一,也是影響軋制鋼坯質(zhì)量的主要因素。若爐溫過(guò)高,則鋼坯在加熱時(shí)會(huì)出現(xiàn)過(guò)熱現(xiàn)象,降低了鋼坯的可塑性,若爐溫過(guò)低,則鋼坯在加熱時(shí)無(wú)法達(dá)到軋制要求。而加熱爐爐溫控制系統(tǒng)是一個(gè)具有大慣性、多干擾的復(fù)雜控制對(duì)象[1]。因此,需要使用優(yōu)化算法對(duì)傳統(tǒng)PID控制加以改進(jìn),以滿足加熱爐爐溫控制需求。
加熱爐爐溫的精準(zhǔn)控制是加熱爐燃燒控制方面的一個(gè)重點(diǎn)研究課題。近年來(lái),國(guó)內(nèi)外學(xué)者提出了多種控制策略,楊勝利[1]提出了一種通過(guò)構(gòu)建模糊規(guī)則庫(kù),利用模糊控制模型,根據(jù)爐溫測(cè)量值與設(shè)定值的偏差及偏差變化率來(lái)調(diào)節(jié)爐溫。張廷玉[2]通過(guò)分析加熱爐傳熱機(jī)制,建立加熱爐精確模型,并利用遺傳算法進(jìn)行尋優(yōu)計(jì)算,從而提高爐溫控制精度。ZHENG 等[3]將模糊控制與PID 控制相結(jié)合,構(gòu)建模糊自整定算法,并應(yīng)用于加熱爐爐溫控制。DING 等[4]提出了一種基于粒子群算法(PSO)的爐溫多目標(biāo)優(yōu)化方法。上述研究策略都取得了較傳統(tǒng)控制策略更好的控制效果,但在跟蹤目標(biāo)性能和抗干擾性能方面不能夠同時(shí)達(dá)到最優(yōu)。李甲申等[5]在板坯加熱爐中使用二自由度PID自動(dòng)燃燒控制系統(tǒng),提出了二自由度控制的設(shè)計(jì)思想,通過(guò)設(shè)計(jì)2個(gè)獨(dú)立的控制器,分別用來(lái)優(yōu)化系統(tǒng)的設(shè)定值跟隨特性和干擾抑制特性。但需要調(diào)節(jié)的二自由度控制參數(shù)數(shù)量較多。卞秀婷等[6-7]基于預(yù)期動(dòng)態(tài)方程(desired dynamic equation,DDE)原理提出了一種較為簡(jiǎn)單的二自由度PID 整定方法,但觀測(cè)器參數(shù)初值選取步驟較為復(fù)雜。
本文針對(duì)加熱爐爐溫控制提出一種基于螢火蟲優(yōu)化算法的預(yù)期動(dòng)態(tài)二自由度控制策略,通過(guò)設(shè)計(jì)PID控制器對(duì)系統(tǒng)模型進(jìn)行調(diào)試,得到預(yù)估調(diào)節(jié)時(shí)間,代入預(yù)期動(dòng)態(tài)方程中得到控制參數(shù)(kp、ki、kd、b)關(guān)系式,再利用螢火蟲算法對(duì)預(yù)期動(dòng)態(tài)方程中的控制參數(shù)進(jìn)行深度尋優(yōu),從而得到更為精確的二自由度控制參數(shù)。
1 加熱爐系統(tǒng)特性
按空氣和煤氣的預(yù)熱方式不同,加熱爐有多種類型,如換熱式、蓄熱式和不預(yù)熱加熱爐。本文以目前廣泛使用的蓄熱式加熱爐為應(yīng)用對(duì)象。蓄熱式加熱爐集換向式燃燒;蓄熱式余熱回收以及電子自控系統(tǒng)于一體,結(jié)構(gòu)新穎、技術(shù)指標(biāo)先進(jìn),可以采用熱值比較低的燃料。與傳統(tǒng)的加熱爐相比,蓄熱式加熱爐具有以下特點(diǎn)。
蓄熱式加熱爐熱效率高、能耗低,通過(guò)蓄熱室,可以高效率地將待排出的煙氣中所包含的大量余熱進(jìn)行回收用來(lái)預(yù)熱空氣和煤氣。圖1所示為蓄熱式加熱爐橫切面結(jié)構(gòu)。由圖1可見(jiàn):在爐子的兩邊各有一排燒嘴,空氣與燃料由燒嘴噴出,對(duì)鋼坯進(jìn)行加熱。通過(guò)鼓風(fēng)機(jī)工作,將外部的常溫空氣輸入進(jìn)來(lái),再通過(guò)空氣與煤氣的換向閥工作,切換輸入管道,將常溫空氣輸入蓄熱式A 中。利用蓄熱室中回收的余熱將常溫空氣的溫度在較短的時(shí)間內(nèi)提升到接近爐內(nèi)溫度,常溫空氣在被加熱成高溫空氣后輸送進(jìn)加熱爐爐膛中,同時(shí)將經(jīng)過(guò)均熱器預(yù)熱過(guò)的煤氣燃料送入爐膛,進(jìn)行燃燒。1 200 ℃以上的煙氣被吸入另一個(gè)蓄熱室B,自上而下流經(jīng)蓄熱室的蓄熱體,煙氣中90%的熱量被蓄熱體吸收,經(jīng)換向系統(tǒng),由引風(fēng)機(jī)抽引至煙囪排入大氣。通過(guò)換向閥周期切換,能夠讓兩側(cè)的燃燒器交替蓄熱和放熱,從而達(dá)到節(jié)能的目的[8-9]。
加熱爐是一個(gè)典型的復(fù)雜控制對(duì)象,各參數(shù)相互之間存在較強(qiáng)的耦合關(guān)系,而且燃燒過(guò)程具有時(shí)滯性、干擾量多等特性,很難通過(guò)機(jī)理法建模得到較為準(zhǔn)確的數(shù)學(xué)模型,在各項(xiàng)被控?cái)?shù)據(jù)中,爐溫為加熱爐主要被控對(duì)象,與其相關(guān)的主要影響因素有燃料流量、空氣量、被加熱物質(zhì)溫度等,其中,最主要的是燃料流量。控制被加熱物料出口溫度實(shí)質(zhì)就是在首先保證燃料穩(wěn)定燃燒的情況下,通過(guò)實(shí)時(shí)跟蹤被加熱物質(zhì)出爐溫度并通過(guò)調(diào)節(jié)燃料供給流量以達(dá)到溫度控制效果,當(dāng)燃料量發(fā)生改變時(shí)將通過(guò)空燃比有效改變引入的空氣流量,隨后通過(guò)煙氣含氧量來(lái)控制尋找最佳空燃比以提高加熱爐燃燒效率。
本文采用測(cè)試建模的方法,采集1 000組現(xiàn)場(chǎng)運(yùn)行加熱爐的爐溫?cái)?shù)據(jù),選擇多項(xiàng)逼近和滑動(dòng)平均值數(shù)字濾波法對(duì)采集的數(shù)據(jù)進(jìn)行數(shù)據(jù)預(yù)處理,剔除樣本數(shù)據(jù)的奇異項(xiàng)和趨勢(shì)項(xiàng),消除因干擾而引起的原始數(shù)據(jù)的重大畸變;在此基礎(chǔ)上,選取前800 組數(shù)據(jù)利用最小二乘法辨識(shí)系統(tǒng)參數(shù)[10-11],得到加熱爐爐溫模型:
式中:GP(s)為加熱爐溫模型傳遞函數(shù);s為微分算子。
再利用剩下的200組數(shù)據(jù)對(duì)得到的模型進(jìn)行輸入仿真運(yùn)行,得到在相同輸入值的情況下擬合模型輸出溫度和實(shí)際輸出溫度的對(duì)比情況,如圖2和圖3所示。

圖2 擬合模型輸出溫度與實(shí)際輸出溫度對(duì)比圖Fig.2 Comparisons of model of output temperature and actual output temperature
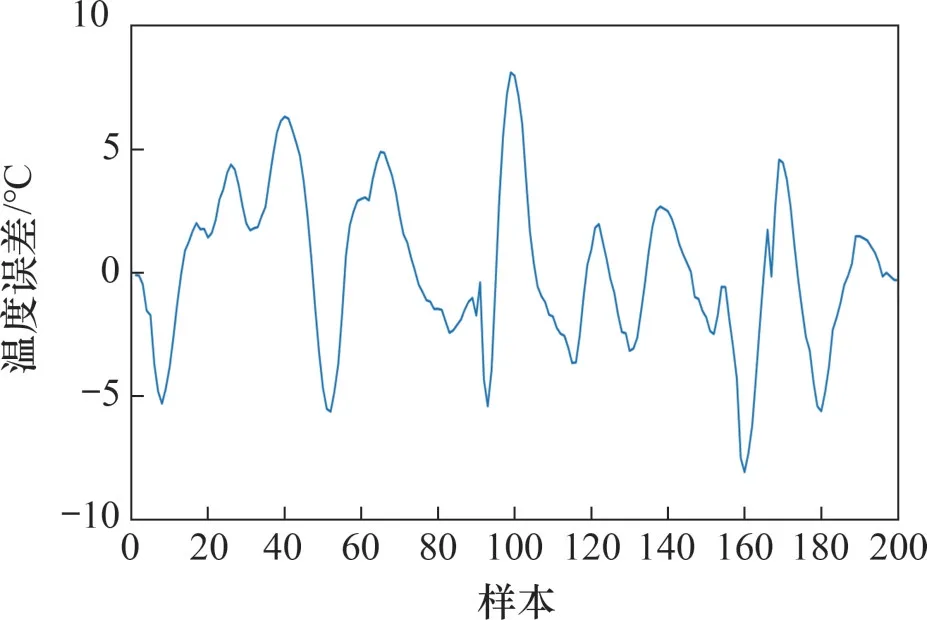
圖3 擬合模型輸出溫度與實(shí)際輸出溫度誤差圖Fig.3 Error of fitted model of output temperature and actual output temperature
由圖2 和圖3 可知:擬合所得模型精度較高,能夠作為本次加熱爐的傳遞函數(shù)模型。
2 加熱爐爐溫優(yōu)化控制設(shè)計(jì)
2.1 基于預(yù)期動(dòng)態(tài)法的二自由度PID
對(duì)于通過(guò)控制燃?xì)饬縼?lái)控制爐溫的控制系統(tǒng),可近似地看作單輸入單輸出(SISO)系統(tǒng),被控對(duì)象可近似表示為
式中:GP為被控制對(duì)象函數(shù);n為系統(tǒng)極點(diǎn)個(gè)數(shù);r為相對(duì)階次;H為系統(tǒng)高頻增益。考慮模型誤差及系統(tǒng)不確定性,H、ai(i=0,…,n-1)、bi(i=0,…,n-r- 1)均為未知傳遞函數(shù)表達(dá)式常數(shù)。TORNAMBE等[12-14]針對(duì)式(2)設(shè)計(jì)了一種非線性魯棒控制器(TC),并對(duì)初始系統(tǒng)進(jìn)行如下假設(shè):1)系統(tǒng)GP的相對(duì)階次r為已知條件;2)系統(tǒng)的零、極點(diǎn)均位于S左半平面;3)系統(tǒng)高頻增益H的符號(hào)函數(shù)sgn(H)已知;4)系統(tǒng)輸出變量y(t)及其r-1 階導(dǎo)數(shù)可測(cè);5)系統(tǒng)(3)的分子分母相對(duì)互質(zhì),系統(tǒng)不可觀不可測(cè)模態(tài)漸近穩(wěn)定。
設(shè)(A,B,C)為式(2)的最小能控實(shí)現(xiàn),通過(guò)如下關(guān)系式變換:
式中:A為狀態(tài)轉(zhuǎn)移矩陣;B為輸入矩陣;C為輸出矩陣;D為直接傳遞矩陣;x為狀態(tài)向量;u為輸入向量;y為輸出向量。
可將系統(tǒng)化為標(biāo)準(zhǔn)型:
式中:z=(z1,…,zr)T,ci=(c0,…,cr-1),w=(w1,…,wn-r)T,d=(d0,…,dn-r-1),均為未知參數(shù)。將系統(tǒng)的各種不確定性和外擾歸結(jié)為擴(kuò)張狀態(tài)變量:
則式(4)中的可重新寫為
設(shè)計(jì)Tornambe型控制器:
式中:和為觀測(cè)器參數(shù)。用來(lái)實(shí)時(shí)觀測(cè)擴(kuò)張狀態(tài)變量f(z,w,u)。選取合適參數(shù)可使閉環(huán)系統(tǒng)動(dòng)態(tài)特性滿足:
式中:y為輸出量;yr為輸入量;h0,…,hr-1為傳遞函數(shù)系數(shù)。
當(dāng)相對(duì)階次r=2 時(shí),王維杰等[15]重新定義了TC 中表示模型誤差等系統(tǒng)不確定性和外擾的擴(kuò)張狀態(tài)變量:

對(duì)式(7)中的兩邊進(jìn)行求導(dǎo),將式(10)和式(11)代入,并通過(guò)拉普拉斯變換得到
式中:k為觀測(cè)器參數(shù)。若想要讓閉環(huán)系統(tǒng)滿足預(yù)期動(dòng)態(tài)特性方程:
則控制律應(yīng)為
用觀測(cè)器變量近似地取代擴(kuò)張狀態(tài)變量,對(duì)式(10)進(jìn)行拉普拉斯變換后代入式(14),則控制律可表示為
將式(15)進(jìn)行化簡(jiǎn)運(yùn)算可得相關(guān)二自由度PID控制律:
則基于預(yù)期動(dòng)態(tài)法的二自由度PID控制結(jié)構(gòu)如圖4所示。

圖4 基于預(yù)期動(dòng)態(tài)法二自由度PID結(jié)構(gòu)Fig.4 Two degree of freedom PID structure based on desired dynamic equation
2.2 參數(shù)穩(wěn)定域計(jì)算
通常在低增益、大慣性的溫度控制系統(tǒng)中,將系統(tǒng)默認(rèn)為過(guò)阻尼系統(tǒng),若希望系統(tǒng)整體不出現(xiàn)超調(diào)量,且調(diào)節(jié)時(shí)間較短,一般采用臨界阻尼系統(tǒng)。在經(jīng)典控制理論中,將式(17)作為傳遞函數(shù)的標(biāo)準(zhǔn)形式:
另一形式為
式中:ωn為自然頻率;ζ為阻尼比;T1和T2為系統(tǒng)的時(shí)間常數(shù),當(dāng)系統(tǒng)為臨界阻尼(ζ=1)時(shí),T1=T2,若將預(yù)期動(dòng)態(tài)方程采用標(biāo)準(zhǔn)形式,即
在以上參數(shù)均已確定的情況下,對(duì)k-L的穩(wěn)定范圍進(jìn)行計(jì)算,即求取當(dāng)系統(tǒng)能夠滿足自穩(wěn)定運(yùn)行時(shí)k、L所對(duì)應(yīng)的參數(shù)選取范圍,具體步驟如圖5所示。

圖5 k、L參數(shù)穩(wěn)定域判定流程圖Fig.5 Flow chart of parameters k and Lstability region determination
2.3 螢火蟲算法參數(shù)尋優(yōu)
螢火蟲算法(firefly algorithm)因其具有參數(shù)少、易于實(shí)現(xiàn)等特點(diǎn),已在眾多領(lǐng)域取得應(yīng)用。螢火蟲算法通過(guò)模擬自然界螢火蟲由自身發(fā)光亮度從而互相吸引,并且會(huì)向發(fā)光亮度高的個(gè)體移動(dòng)的行為,種群中的每一個(gè)螢火蟲代表的位置向量可以看作一組優(yōu)化解,通過(guò)不斷搜尋發(fā)光亮度最高的螢火蟲的位置信息來(lái)尋找最優(yōu)解[16-19]。在螢火蟲算法中有幾個(gè)較為重要的參數(shù)。
1)相對(duì)熒光亮度I為
式中:I0為螢火蟲自身亮度;ri,j為螢火蟲i與j之間的空間距離,
γ為光強(qiáng)吸收系數(shù),因?yàn)闊晒鈺?huì)隨距離增加和傳播媒介的吸收逐漸減弱,會(huì)使螢火蟲每次感知的距離有限,每次只能朝著最優(yōu)值靠近一點(diǎn),所以需要不斷迭代,逐步逼近最優(yōu)值。
2)相對(duì)吸引度βij為
式中:β0為最大吸引度,一般設(shè)定值為1。
3)螢火蟲位置更新公式:
式中:xi和xj分別為螢火蟲i和j所處的空間位置;ρ為當(dāng)前迭代次數(shù);α為步長(zhǎng)因子,α∈[0,1]為步長(zhǎng)因子;rand為[0,1]上服從均勻分布的隨機(jī)數(shù)。
4)選用ITAE 指標(biāo)fITAE作為螢火蟲算法的目標(biāo)函數(shù)值:
fITAE越小,意味著結(jié)果越優(yōu),令
可以得到當(dāng)目標(biāo)函數(shù)值越優(yōu)時(shí),螢火蟲亮度越高。
具體優(yōu)化流程如圖6所示。

圖6 螢火蟲算法流程圖Fig.6 Flow chart of firefly algorithm
通過(guò)螢火蟲優(yōu)化算法對(duì)參數(shù)穩(wěn)定域中的參數(shù)進(jìn)行尋優(yōu),從而得到更為精確的二自由度參數(shù),使得整體系統(tǒng)的實(shí)際動(dòng)態(tài)特性在滿足系統(tǒng)穩(wěn)穩(wěn)定性的前提下能夠更加地接近預(yù)期動(dòng)態(tài)特性方程,使整體系統(tǒng)動(dòng)態(tài)性能更加靠近理想目標(biāo),從而有效地改善控制系統(tǒng)的動(dòng)態(tài)特性。
3 加熱爐控制仿真
首先,利用臨界比例度法、衰減曲線法和經(jīng)驗(yàn)整定法[20]3種不同整定參數(shù)的方法來(lái)設(shè)計(jì)傳統(tǒng)的PID控制器,對(duì)加熱爐模型進(jìn)行調(diào)節(jié),獲得系統(tǒng)的動(dòng)態(tài)特性,如圖7所示。
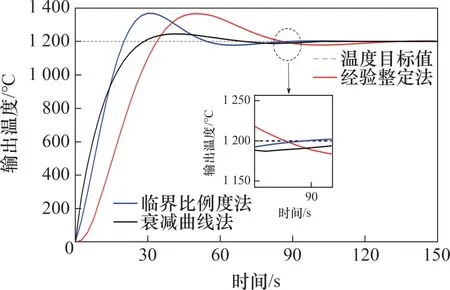
圖7 工程整定法仿真圖Fig.7 Simulation diagram of engineering setting method
從圖7可知:在臨界比例度法、衰減曲線法和經(jīng)驗(yàn)整定法3種不同整定方法下所得到的傳統(tǒng)PID控制在對(duì)本文的加熱爐模型進(jìn)行調(diào)節(jié)時(shí),系統(tǒng)分別在131、89 和102 s 時(shí)達(dá)到穩(wěn)定,且系統(tǒng)均存在超調(diào),在此基礎(chǔ)之上,選取預(yù)期調(diào)整時(shí)間ts為50 s。由式(22)得到h1=0.4,h0=0.04。
根據(jù)本文2.2節(jié)提出的參數(shù)穩(wěn)定域計(jì)算方法進(jìn)行運(yùn)算,最終得到的參數(shù)穩(wěn)定域范圍如圖8所示。將圖8 中的k、L參數(shù)穩(wěn)定域作為螢火蟲算法位置參數(shù)取值范圍,分別用粒子群優(yōu)化算法和螢火蟲優(yōu)化算法進(jìn)行尋優(yōu)。首先進(jìn)行算法初始化,設(shè)置種群數(shù)為100,最大迭代次數(shù)為100,運(yùn)行優(yōu)化算法,得到迭代曲線如圖9所示。

圖8 k和L參數(shù)穩(wěn)定域Fig.8 Stability region of parameters k and L

圖9 螢火蟲算法迭代過(guò)程Fig.9 Iterative process of firefly algorithm
由圖9可知:螢火蟲算法跳出局部最優(yōu)值的能力比粒子群算法的能力強(qiáng),另一方面粒子群優(yōu)化算法在90代尋到最優(yōu)值,而螢火蟲算法在34代尋到最優(yōu)值,且適應(yīng)度更大。螢火蟲算法優(yōu)化的k、L取值分別為12、9。代入式(17),計(jì)算得到最終的控制參數(shù):kp=0.54,ki=0.05,kd=1.38,b=0.53。
為了對(duì)比控制效果,將本文的控制方法與常規(guī)的PID控制、預(yù)期動(dòng)態(tài)法二自由PID控制進(jìn)行比較,3 種方法的控制器參數(shù)如表1所示。即利用MATLAB 軟件分別用3 種控制方法對(duì)加熱爐控制系統(tǒng)模型進(jìn)行仿真。
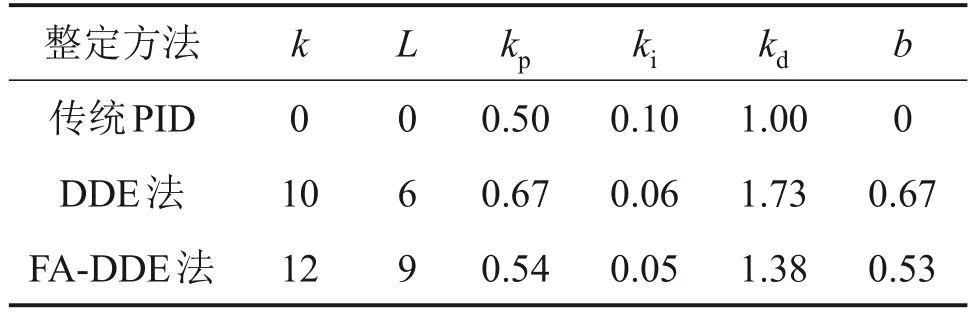
表1 控制器參數(shù)Table 1 Controller parameters
在開(kāi)始時(shí)將目標(biāo)溫度設(shè)定為1 200 ℃,在150 s時(shí)目標(biāo)溫度改變?yōu)? 100 ℃,在300 s 時(shí)目標(biāo)溫度為1 250 ℃。發(fā)現(xiàn)在目標(biāo)值變化的情況下本文所提算法調(diào)節(jié)時(shí)間明顯比傳統(tǒng)的PID控制以及預(yù)期動(dòng)態(tài)二自由度PID 控制調(diào)節(jié)時(shí)間短,仿真結(jié)果如圖10所示。通過(guò)在250 s 時(shí),施加幅值為150 的階躍干擾,以驗(yàn)證本文所提策略抗干擾性能,仿真波形如圖11所示。
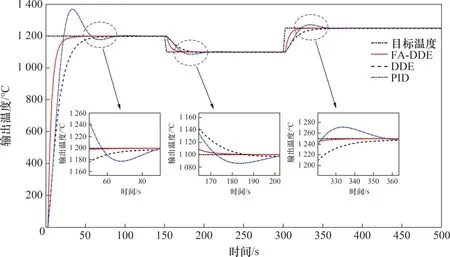
圖10 目標(biāo)值跟蹤性能仿真結(jié)果Fig.10 Simulation results of target tracking performance
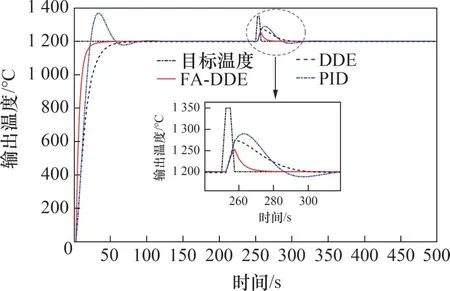
圖11 抗干擾性能仿真結(jié)果Fig.11 Simulation results of anti-interference performance
4 工程應(yīng)用
為驗(yàn)證本文提出的螢火蟲算法(firefly algorithm)優(yōu)化預(yù)期動(dòng)態(tài)(desired dynamic equation,DDE)二自由度PID 的加熱爐爐溫控制策略的優(yōu)越性,以寶武集團(tuán)某軋鋼加熱爐為工程對(duì)象進(jìn)行實(shí)驗(yàn)。該加熱爐控制系統(tǒng)為浙大中控JX-300DCS 系統(tǒng),因外部隨機(jī)擾動(dòng)常規(guī)PID難以將爐溫控制在設(shè)定值1 200 ℃。在保持原控制系統(tǒng)硬件結(jié)構(gòu)不變的前提下,運(yùn)用本文提出的控制策略對(duì)爐溫進(jìn)行優(yōu)化控制,控制系統(tǒng)結(jié)構(gòu)框圖如圖12所示。
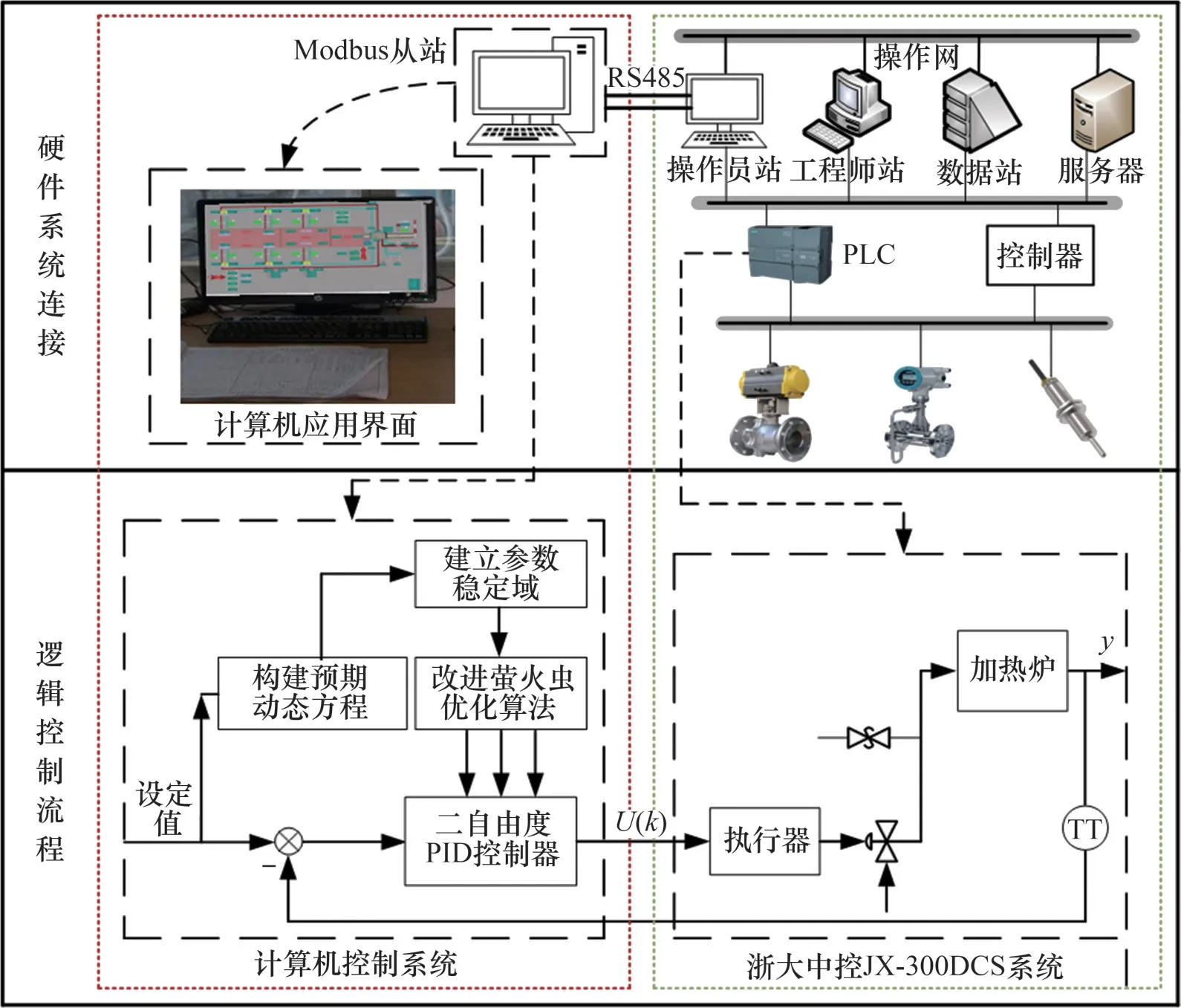
圖12 控制系統(tǒng)架構(gòu)圖Fig.12 Architecture of control system
圖13所示為采用本文控制策略與原PID 控制策略的爐溫實(shí)時(shí)曲線,采集時(shí)間為5 h。

圖13 加熱爐爐溫實(shí)時(shí)曲線Fig.13 Real time curves of furnace temperature
由圖13 可知:原PID 控制總體爐溫在[1 150,1 250]℃之間波動(dòng),采用本文所提爐溫控制策略后,總體爐溫在[1 180,1 220]℃之間波動(dòng),爐溫波動(dòng)降低60%。對(duì)比可知本文所提控制策略的控制效果更佳,爐溫波動(dòng)更小。
5 結(jié)論
1)針對(duì)加熱爐目標(biāo)溫度多變、外部干擾項(xiàng)較多以及傳統(tǒng)PID調(diào)節(jié)時(shí)間較長(zhǎng)等問(wèn)題,提出一種基于螢火蟲算法的預(yù)期動(dòng)態(tài)二自由度PID控制策略。
2)通過(guò)螢火蟲優(yōu)化算法選取最優(yōu)參數(shù),改善二自由度控制參數(shù)初始值選擇過(guò)程復(fù)雜的問(wèn)題,使整體系統(tǒng)動(dòng)態(tài)性能更加靠近理想目標(biāo),從而有效地改善控制系統(tǒng)的動(dòng)態(tài)特性。
3)仿真實(shí)驗(yàn)和工程應(yīng)用驗(yàn)證了本文提出的爐溫控制系統(tǒng)的相關(guān)性能,表明該控制策略的響應(yīng)速度快,抗擾性能好。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
能源工程(2020年6期)2021-01-26 00:55:22
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02