基于FANUC Mate 200iD工業機器人工作站的智能工具庫系統設計
2023-11-02 05:22:32韓宇嚴成武郭付龍楊波
機械 2023年10期
韓宇,嚴成武,郭付龍,楊波
基于FANUC Mate 200iD工業機器人工作站的智能工具庫系統設計
韓宇,嚴成武,郭付龍,楊波
(深圳技師學院 中德智造學院,廣東 深圳 518000)
以FANUC Mate 200iD工業機器人工作站為基礎,開發了一套工業機器人用智能工具庫系統。介紹了該智能工具庫系統的總體方案與工作原理,其機械裝置設計主要包括總體結構設計與末端執行器(工具)定位,控制系統設計包括系統通訊設計與程序設計。完成了整個智能工具庫系統的安裝與調試。該智能工具庫系統能夠在PLC的控制下轉動工位并實現準確定位。為工業機器人準備好放置工具的位置,將工業機器人需要的末端執行器旋轉至更換位,工業機器人運動并完成末端執行器的智能化快速更換,提升整個工作站的工作效率。
FANUC;工業機器人;智能工具庫
隨著技術的發展,工業機器人的應用場合越來越廣泛,以工業機器人為主要設備的工作站應運而生。工業機器人工作站中往往包含了多種工序,由于工業機器人的末端執行器(即工具)的互換性較差,因此工業機器人在完成不同工序時,通常需要更換不同的末端執行器,為此,每個工作站上需要準備多套末端執行器。工業機器人每完成一道工序,則需要更換下一道工序所用的末端執行器。為實現快速更換末端執行的目的,通常采用在工業機器人末端軸與末端執行器之間安裝氣動快換機構的方法。工業機器人工作站中,末端執行器為分散放置,不僅占用工作站的有限空間,而且在編寫工業機器人工作程序時,每一個末端執行器都需要示教至少兩個點位,大大增加了程序編寫的難度和程序的長度,并導致后期工業機器人運行時需要更多的時間來完成末端執行器的更換,降低了工作站的生產效率。為解決上述問題,設計一套工業機器人用智能工具庫系統具有十分重要的意義。
目前,國內外關于工業機器人智能工具庫的研究較少,常見工具庫只有簡單的放置功能,不具備智能化更換的作用。崔華飛等[1-2]采用Arduino開發平臺,開發出基于視覺的Sawyer機器人的智能化快換工具庫,但該快換工具庫造價昂貴,不利于大范圍推廣。為此,本文設計一套以PLC(Programmable Logic Controller,可編程邏輯控制器)為控制單元的智能工具庫系統,為工業機器人系統集成提供技術參考。
1 系統總體方案
1.1 系統組成
本文設計的工業機器人智能工具庫系統以FANUC Mate 200iD工業機器人工作站為基礎,由工業機器人本體、工作站外圍設備、I/O模塊、PLC、步進電機、智能工具庫機械裝置、傳感器等組成。總體方案如圖1所示。
在該工業機器人智能工具庫系統中,工業機器人通過I/O模塊與控制單元PLC交換信息,PLC根據工業機器人的指令控制智能工具庫機械裝置自動運行,實現智能化更換末端執行器的設計意圖。
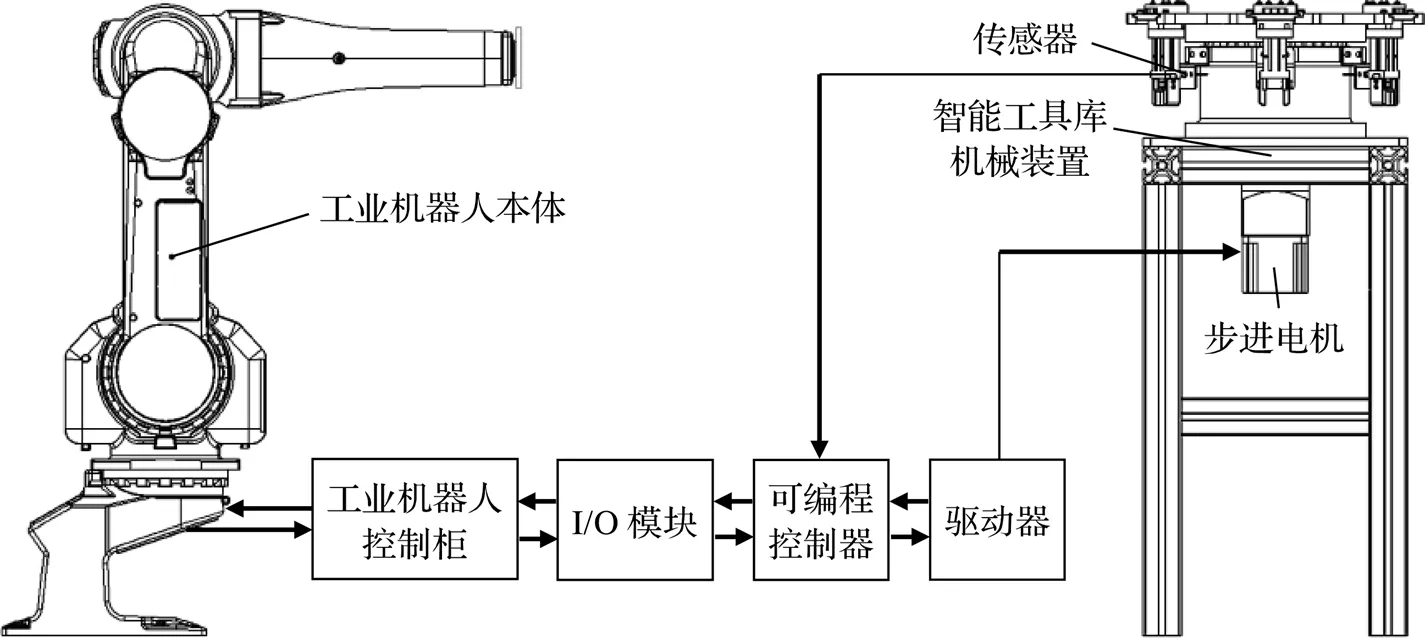
圖1 工業機器人智能工具庫系統總體方案
1.2 系統工作原理
該工業機器人智能工具庫系統的設計采用了計算機通訊技術、電器及自動化控制技術、機械設計與制造技術、傳感器技術等[3-6]。其工作流程如圖2所示。當工業機器人運行程序,發出放置或抓取末端執行器指令時,工業機器人系統通過I/O模塊對外發出請求信號,智能工具庫系統控制單元PLC收到請求信號后,運行梯形圖程序,驅動步進電機旋轉。智能工具庫機械裝置在步進電機的驅動下旋轉,當PLC收到回零傳感器信號后,機械裝置停止旋轉,完成智能工具庫回零動作。接著,PLC依據收到的請求信號(不同的工具放置位對應不同的信號),驅動步進電機旋轉,帶動智能工具庫機械裝置旋轉至所需的工具放置位/抓取位。PLC輸出工具放置位/抓取位到位信號,工業機器人收到到位信號后運行程序,運動到智能工具庫機械裝置工具放置位/抓取位上方,對準其所需工位,通過氣動快換裝置放置或抓取工具,完成放置/抓取末端執行器工作。

圖2 工業機器人智能工具庫系統工作流程
上述工作流程中,工業機器人只需示教定位兩個較為準確的工作點位,即取放置/抓取末端執行器和等待放置/抓取末端執行器兩個精準點位,大大簡化示教編程的難度,有效減少程序的長度,同時提高工業機器人的工作效率。
2 智能工具庫機械裝置設計
智能工具庫機械裝置是整個智能工具庫系統的重要硬件組成,是放置工業機器人工具的硬件平臺。按照整個工業機器人智能工具庫系統的功能要求,智能工具庫機械裝置應具備旋轉和精準定位功能,能夠放置若干個工業機器人工具。
2.1 智能工具庫機械裝置總體結構
如圖3所示,工業機器人智能工具庫系統機械裝置上有6個工具放置位,呈360°均勻分布,可以同時放置6個不同種類的末端執行器(工具)。智能工具庫機械裝置主要由步進電機、減速機、聯軸器、電機固定箱體、推力軸承、掛裝板等組成。工業機器人末端執行器通過定位銷和定位面放置在掛裝板上,以使各個工位旋轉到位后氣動快換法蘭盤的重復定位精度滿足更換要求。

圖3 智能工具庫系統機械裝置結構
工業機器人智能工具庫系統機械裝置采用SolidWorks 2019軟件設計。整個裝置傳動鏈結構簡單,采用步進電機加精密行星減速機直接驅動的方式,驅動智能工具庫旋轉部分組件旋轉,從而實現不同工具位的旋轉換位[7]。使用的精密行星減速機和步進電機均為臺灣峰樺科技有限公司生產。其中,精密行星減速機結構為二級傳遞,減速比16,傳動效率94%;步進電機為ABCH280-4C60S型號的二相開環步進電機,額定扭矩4.5 N·m,轉動慣量1800 g·cm2。
2.2 末端執行器(工具)定位
智能工具庫系統工作時,由于工業機器人抓取或放置末端執行器的位置是固定的,而智能工具庫有6個工位,為保證智能工具庫系統每個工位都能精準對接工業機器人放置或抓取末端執行器示教點,需要對智能工具庫系統中工具放置位進行精準定位。
智能工具庫系統中,采用PLC、步進電機、精密減速機、傳感器構成閉環控制的方式實現周向定位[8-9]。當智能工具庫旋轉時,PLC收到傳感器的到位信號后,迅速控制步進電機實現精準停止,從而實現周向定位。
為保證智能工具庫系統能夠正常工作,除了周向定位,還需保證末端執行器在每個工位中的精準定位。如圖4所示,工業機器人末端執行器(工具)的定位面分為定位A面、定位B面、定位C面。在智能工具庫機械裝置中,每個工位的掛裝板上都裝配有兩個圓柱定位銷,并在掛裝板上設計有U型定位面。工業機器人末端執行器(工具)的定位A面與掛裝板的U型定位面配合,兩個圓柱定位銷分別與工業機器人末端執行器(工具)的定位B面和C面配合定位,從而實現工業機器人末端執行器(工具)在每個工位中的精準定位。
3 控制系統設計
3.1 系統通訊
智能工具庫系統基于FANUC Mate 200iD工業機器人工作站,采用SIMATIC S7-1200 PLC為控制單元,通過工業機器人與PLC組態實現工業機器人與控制單元之間的通訊[10-11]。
工業機器人智能工具庫系統調試現場如圖5所示。FANUC Mate 200iD工業機器人和智能工具庫通過通訊電纜連接,其中靠近工業機器人端的信號線連接在I/O接線板上,靠近智能工具庫端的連接在SIMATIC S7-1200 PLC的輸入/輸出端子排上。
FANUC Mate 200iD工業機器人與SIMATIC S7-1200 PLC I/O配置通訊協議如表1所示。

表1 工業機器人與PLC I/O配置通訊協議表
表1中,工業機器人抓取/放置的請求信號為機器人對外輸出信號,1~6號工位的輸出信號分別對應DO103~DO108,這6個信號與控制單元SIMATIC S7-1200 PLC的輸入信號I1.0~I1.6對應;刀庫回零到位信號DI102和刀庫準備就緒信號DI101為FANUC Mate 200iD工業機器人輸入等待信號,分別與控制單元SIMATIC S7-1200 PLC的輸出信號Q1.0和Q1.1對應。

圖5 智能工具庫系統實物圖
3.2 程序設計
程序是整個工業機器人智能工具庫系統正常工作的關鍵要素。工業機器人智能工具庫程序主要包括控制單元PLC的梯形圖程序和工業機器人運行抓取或放置工具的程序[12-13],二者之間通過約定的信號地址實現信息交互,以實現整個智能庫系統的智能化工作。
工業機器人智能工具庫系統放置工具時,控制單元PLC的梯形圖程序架構邏輯關系流程圖如圖6所示。控制單元PLC收到工業機器人放置工具指令后,控制智能工具庫機械裝置旋轉至工具放置位,并輸出到位信號給工業機器人[14-16],工業機器人收到到位信號后運行自身程序,完成放置工具動作。
FANUC Mate 200iD工業機器人請求抓取智能工具庫6號工位工具程序為:
1:J @PR[1:HOME] 100% FINE; 機器人回HOME點;
2: DO[102:OFF] =ON ; 機器人對外輸出信號102打開;
3: WAIT 2.0(sec); 等待2秒鐘;
4: DO[102:OFF] =OFF ; 機器人對外輸出信號102關閉;
5: WAIT 8.00(sec); 等待8秒鐘;
6: DO[108:OFF] =ON ; 機器人對外輸出信號108打開;
7: WAIT 2.0(sec); 等待2秒鐘;
8: DO[108:OFF] =OFF ; 機器人對外輸出信號108關閉;
9:J @PR[1:HOME] 100% FINE; 機器人回HOME點;
10: J P[1] 100% FINE; 機器人運動到P1點;
… …
37: J P[3] 15% FINE; 機器人運動到P3點;
38: J P[2] 100% FINE; 機器人運動到P2點;
39: J @PR[1:HOME] 100% FINE; 機器人運動到HOME點;
[End] 結束;
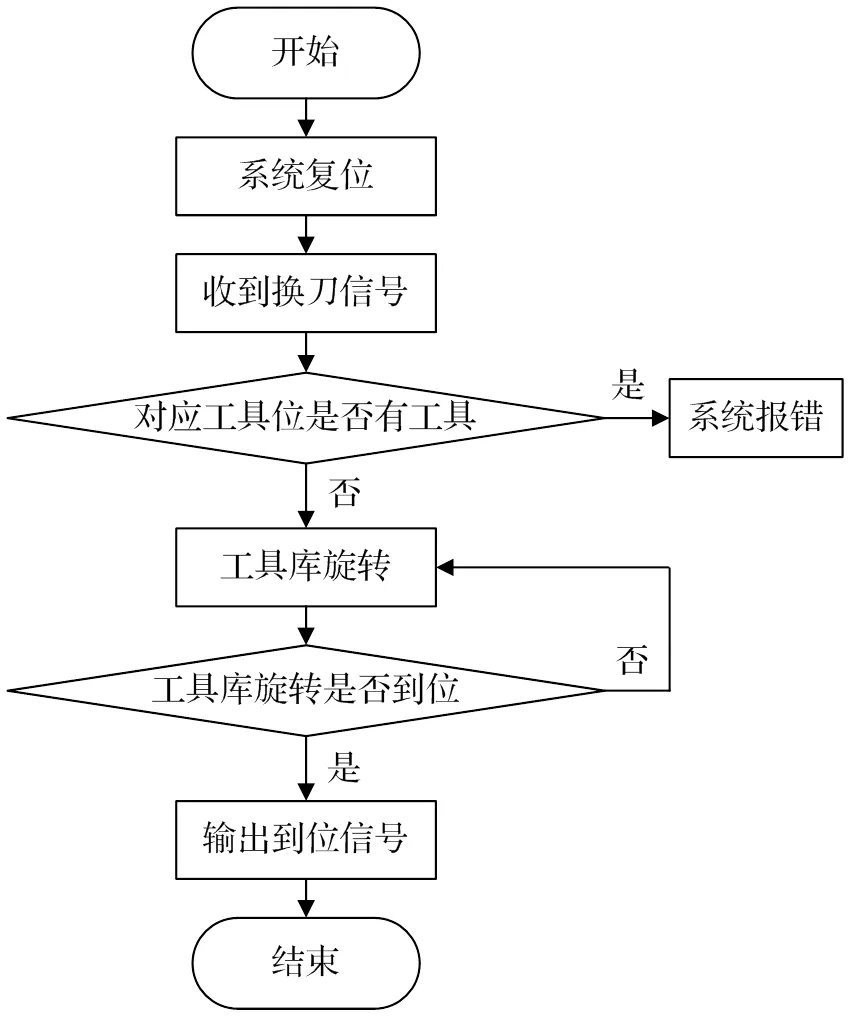
圖6 智能工具庫放置工具程序流程圖
4 結論
為解決工業機器人工作站多種末端執行器分散放置造成使用不便的痛點,構建出一種能夠實現智能化快速更換末端執行器的方法,并依據該方法,設計并搭建基于FANUC Mate 200iD工業機器人工作站的智能工具庫系統。本項目以PLC為控制單元,通過I/O模塊與工業機器人進行信號交互,控制智能工具庫機械裝置精準定位,實現工業機器人快速智能化更換末端執行器。
該工業機器人智能工具庫系統穩定可靠、性價比突出,適合融入工業機器人工作站及其應用產線中。
[1]崔華飛. 基于Sawyer機器人的智能化快換工具庫研究[D]. 煙臺大學,2021.
[2]白蕾,張小潔,侯偉. 基于工業機器人的智能生產線設計與開發[J]. 工業儀表與自動化裝置,2018(3):69-72.
[3]侯志剛,張云海,胡斌,等. 協作機器人抓握式柔性夾持器設計[J]. 現代制造工程,2021(5):47-52.
[4]候帥. 多自由度機器人搬運平臺調平控制系統研究[D]. 西安:長安大學,2017.
[5]袁培江,陳冬冬,王田苗,等. 基于雙目視覺測量系統的孔位補償研究[J]. 航空制造技術,2018,61(4):41-46.
[6]張偉豪. 基于機器視覺的氣門無序擺放抓取系統的研究[D]. 鄭州:鄭州大學,2021.
[7]王亞龍. 基于SVM標定算法的氣門視覺抓取系統研究[D]. 鄭州:鄭州大學,2020.
[8]劉坤. 基于PLC的開放式工業機器人運動控制教學平臺研究與實現[D]. 杭州:杭州電子科技大學,2022.
[9]胡艷琳. 基于PLC控制的物料檢測分類放置工業機器人系統研究與設計[D]. 石家莊:河北科技大學,2020.
[10]劉彬. 基于PLC的工業搬運機器人運動控制系統研究[D]. 唐山:華北理工大學,2020.
[11]何東明. 基于機器人和PLC的玻璃磨邊自動化控制系統設計[D]. 宜昌:三峽大學,2020.
[12]黃信兵,劉小娟,李春貴. 基于Profinet的切削加工單元智能化改造設計與應用[J]. 機床與液壓,2022,50(10):124-128.
[13]孟靜靜,郝睿,王惠卿,等. 基于PLC與工業機器人的自動生產線智能包裝系統設計[J]. 制造技術與機床,2021(11):63-67.
[14]周文婷,孟凡文,王海亮. 基于MODBUS-TCP協議的視覺系統、PLC與工業機器人通信設計[J]. 電子世界,2020(21):132-133,137.
[15]韓宇,何善印,鄭泳洋,等. 一種工業機器人的智能工具庫系統:CN115284334A[P]. 2022-11-04.
[16]王哲祿. 基于PLC與工業機器人的拋光打磨工作站控制系統的設計與實現[J]. 制造業自動化,2019,41(7):103-105,147.
Design of Intelligent Tool Library System Based on FANUC Mate 200iD Industrial Robot Workstation
HAN Yu,YAN Chengwu,GUO Fulong,YANG Bo
(Sino-German College of Intelligent Manufacturing, Shenzhen Institute of Technology, Shenzhen 518000, China )
Based on the FANUC Mate 200iD industrial robot workstation, this paper studies and develops an intelligent tool library system for industrial robots. The overall scheme and working principle of the intelligent tool library system were introduced. The mechanical device design mainly includes the overall structure design and end effector (tool) positioning, while the control system design includes system communication design and program design. The installation and debugging of the entire intelligent tool library system has been completed. The system can rotate the station and achieve accurate positioning under the control of PLC, prepare the position for the industrial robot to place tools, and rotate the required end actuator to the replacement position. Industrial robots move and complete the intelligent and rapid replacement of the end actuator, and the working efficiency of the entire work station has been improved.
FANUC;industrial robot;intelligent tool library
TP242.2
A
10.3969/j.issn.1006-0316.2023.10.013
1006-0316 (2023) 10-0075-06
2023-02-13
深圳技師學院校級科研項目——工業機器人智能工具庫關鍵技術研究(2211016)
韓宇(1985-),男,河南南陽人,碩士,高級工程師,主要研究方向為數控技術、工業機器人技術等,E-mail:925060536@qq.com。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25