一種用于農(nóng)業(yè)巡檢機(jī)器人的云臺系統(tǒng)設(shè)計與樣機(jī)實驗
2023-11-03 08:49:08李煜東黃澤灝黃增航馮國健梁柏林
南方農(nóng)機(jī) 2023年22期
李煜東 ,黃澤灝 ,黃增航 ,馮國健 ,梁柏林
(華南農(nóng)業(yè)大學(xué)工程學(xué)院,廣東 廣州 510642)
0 引言
隨著巡檢機(jī)器人的不斷研究、發(fā)展,云臺的設(shè)計已成為當(dāng)前研究的熱門課題之一,在此發(fā)展前景下,云臺的設(shè)計廣泛應(yīng)用于巡檢機(jī)器人、航拍無人機(jī)、農(nóng)業(yè)、醫(yī)療、監(jiān)測控制等眾多領(lǐng)域。
國內(nèi)云臺已有30多年的發(fā)展歷史,最早的云臺主要用于攝像機(jī)上。經(jīng)過不斷的研究發(fā)展,云臺的性能也從最初的單方向控制到現(xiàn)在的全方位360°控制。在農(nóng)業(yè)領(lǐng)域,大疆T50農(nóng)業(yè)無人機(jī)內(nèi)置高精度、高穩(wěn)定性的機(jī)械式云臺,大大提高了機(jī)器的靈活性,不僅能夠進(jìn)行精確旋轉(zhuǎn)和平移,還能夠?qū)崿F(xiàn)攝像機(jī)的穩(wěn)定運動,進(jìn)行數(shù)據(jù)采集和控制[1]。而在國外的云臺研究上,從最開始的只能實現(xiàn)單一方向旋轉(zhuǎn)以及轉(zhuǎn)動精度和承載能力都比較低的狀態(tài),發(fā)展到了如今具有一定高度的云臺技術(shù)。美國菲力爾公司(Teledyne FLIR)研發(fā)的FLIR PTU-E46高精度掃描云臺僅僅采用了一對步進(jìn)電機(jī),由12 V~30 V直流電源驅(qū)動,其俯仰角度為111°,方位角范圍為-180°~+180°,非常小巧且質(zhì)量輕盈[2]。目前部分云臺系統(tǒng)應(yīng)用PID算法來對云臺進(jìn)行穩(wěn)定設(shè)計[3-4],在確定了相關(guān)參數(shù)的PID控制下,可以保證一定工況下的理想效果,在控制精度以及響應(yīng)速度上能夠滿足運行要求[5]。
基于此,本文設(shè)計了一種控制精度較高、響應(yīng)速度快、輕量化、適應(yīng)復(fù)雜農(nóng)業(yè)巡檢環(huán)境的云臺系統(tǒng),同時設(shè)計了農(nóng)業(yè)巡檢機(jī)器人樣機(jī),對云臺系統(tǒng)的控制精度和響應(yīng)速度進(jìn)行了實驗,經(jīng)過實驗,該云臺系統(tǒng)實現(xiàn)了基本無超調(diào)、無靜差的較高控制精度和毫秒級的響應(yīng)速度,為后續(xù)相關(guān)農(nóng)業(yè)巡檢機(jī)器人的云臺設(shè)計提供了新的思路。
1 云臺系統(tǒng)機(jī)械設(shè)計
本設(shè)計的云臺系統(tǒng)機(jī)械結(jié)構(gòu)采用板材-軸承-金屬連接件的設(shè)計,在保證了云臺強(qiáng)度的同時,能夠減少不必要的重量。在主要承力結(jié)構(gòu)上進(jìn)行了受力分析,使用多種板材、軸承以及金屬連接件,在不損失機(jī)械強(qiáng)度的條件下盡可能地平衡云臺的穩(wěn)定性和輕量化,使其能夠應(yīng)用于復(fù)雜多變的農(nóng)業(yè)巡檢場景。相應(yīng)的云臺系統(tǒng)機(jī)械設(shè)計圖如圖1所示。
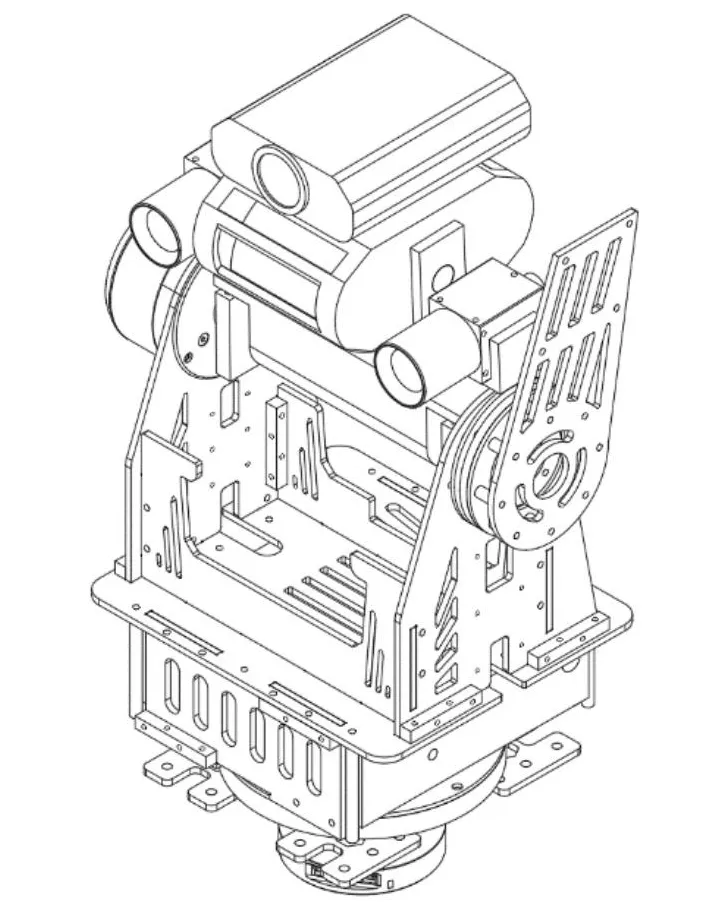
圖1 云臺系統(tǒng)機(jī)械設(shè)計圖
云臺YAW軸方向上,主體采用半包圍方型榫卯結(jié)構(gòu),使用4塊碳纖維板材即可達(dá)到設(shè)計要求并且起到較好的遮蔽效果,不僅具有防塵作用,也更加便于檢修。PITCH軸與側(cè)板間采用軸承與CNC加工件進(jìn)行連接,盡可能減小了電機(jī)傳動過程的虛位,保證了傳動效率。云臺的機(jī)械結(jié)構(gòu)使用碳纖維板材,不僅保障了足夠的承重能力,也在不降低結(jié)構(gòu)強(qiáng)度的前提下實現(xiàn)了顯著輕質(zhì)化。從下至上,分為下層工控設(shè)備固定層、中部碳纖維支撐架以及上層巡檢結(jié)構(gòu),采用兩軸結(jié)構(gòu),固定層下方中心位置通過軸承及餐桌轉(zhuǎn)盤與大疆GM6020電機(jī)裝配構(gòu)成YAW軸;中間的碳纖維支撐架采用榫卯結(jié)構(gòu)同時搭配有六面螺母進(jìn)行固定,具有較好的承重及抗振動能力;在碳纖維支撐架上采用雙軸承固定電機(jī),構(gòu)成PITCH軸,轉(zhuǎn)動穩(wěn)定,進(jìn)一步增強(qiáng)了系統(tǒng)的緩振性能,為云臺在面對惡劣外部環(huán)境時的穩(wěn)定性提供了可靠保障。
2 云臺控制系統(tǒng)設(shè)計
2.1 云臺控制系統(tǒng)硬件設(shè)計
該農(nóng)業(yè)巡檢機(jī)器人樣機(jī)的主控制器采用意法半導(dǎo)體的32位處理器STM32F407VET6作為主控芯片,并且在40 mm×40 mm的面積上集成了高效率的DC-DC開關(guān)電源電路、低紋波的LDO線性穩(wěn)壓電路、兩路CAN總線收發(fā)電路、外部按鍵復(fù)位電路以及USART信號取反電路等。使用了高達(dá)16 MHz的高速外部無源晶振為芯片提供精準(zhǔn)的時鐘信號,用于整機(jī)的控制信號輸出以及數(shù)據(jù)采集。同時,采用板對板連接器與相應(yīng)底板連接,旨在把核心板與底板分離,減小焊接工作量,便于維修,主控制器核心板3D渲染圖如圖2所示
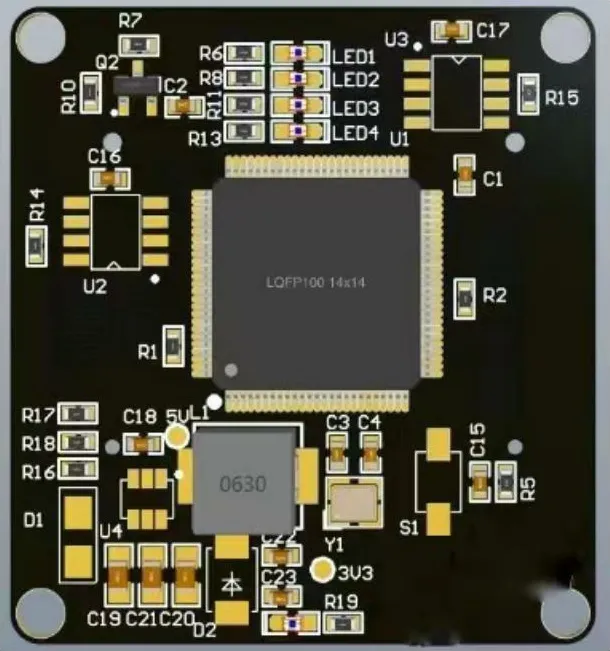
圖2 主控制器核心板3D渲染圖
2.2 云臺控制系統(tǒng)軟件設(shè)計
本研究設(shè)計的控制程序使用STM32CubeMX工具進(jìn)行圖形化配置,簡化單片機(jī)的外設(shè)初始化過程。并在Keil編譯器上基于生成的工程,使用C語言為機(jī)器人的各項功能撰寫任務(wù)程序。最終使用FreeRTOS(Free Real Time Operating System)操作系統(tǒng)采用任務(wù)調(diào)度的控制邏輯,分別設(shè)置底盤任務(wù)和云臺任務(wù),控制整臺機(jī)器人的運行狀態(tài)[6]。云臺系統(tǒng)的控制對象是云臺雙軸的GM6020電機(jī),通過DT7遙控器的右撥桿進(jìn)行控制,撥桿的位移量指定了云臺目標(biāo)偏航角和俯仰角的增量,建立起了遙控器撥桿與云臺角度控制的聯(lián)系。
PID控制算法是一種常用的工業(yè)控制算法,它可以根據(jù)系統(tǒng)反饋和系統(tǒng)設(shè)定之間的偏差以及其積分和微分的線性組合構(gòu)成控制器的輸出,通過適當(dāng)?shù)膮?shù)配置,能夠滿足控制系統(tǒng)對響應(yīng)速度、控制精度的需求,經(jīng)離散化后的位置式PID算法原理如下[7]:
式中,k——采樣序號,k=0、1、2、3…;u(k)——第k次采樣時刻PID控制器的輸出值;e(k)——第k次采樣時刻PID控制器輸入的偏差值;e(k-1)——第k-1次采樣時刻PID控制器輸入的偏差值;Kp——比例系數(shù);Ki——積分系數(shù);Kd——微分系數(shù)。
該雙軸云臺系統(tǒng)在控制上使用了串級PID閉環(huán)控制系統(tǒng),串級PID閉環(huán)控制由兩個閉環(huán)PID控制器組成,內(nèi)環(huán)使用PI控制器作為角速度環(huán),外環(huán)使用PD控制器作為角度環(huán),從而構(gòu)成PD-PI串級控制器。其中,外環(huán)角度控制器的反饋值為IMU傳感器的角度反饋。通過將兩個PID控制環(huán)節(jié)串聯(lián),能夠增強(qiáng)系統(tǒng)的穩(wěn)定性和響應(yīng)速度[8]。結(jié)合電機(jī)編碼器位置反饋與搭載在云臺上的陀螺儀兩軸角速度反饋,搭建起位置-速度串級雙閉環(huán)PID控制系統(tǒng)。該控制系統(tǒng)能夠有效控制云臺電機(jī)的旋轉(zhuǎn)角度,搭配合適的參數(shù),即可對輸入角度信號實現(xiàn)較好的跟隨與抗干擾效果,云臺串級PID控制流程框圖如圖3所示。

圖3 云臺串級PID控制流程框圖
FreeRTOS中的云臺任務(wù)流程為:接收到DT7遙控器右撥桿的坐標(biāo)信息后,主控制器核心板轉(zhuǎn)換為云臺角度的增量,與當(dāng)前角度相加后作為串級PID控制器的目標(biāo)角度。經(jīng)計算后得出電機(jī)的目標(biāo)電流,該信號經(jīng)CAN總線發(fā)送至電機(jī),驅(qū)動云臺系統(tǒng)運動至目標(biāo)角度,云臺任務(wù)程序流程框圖如圖4所示。
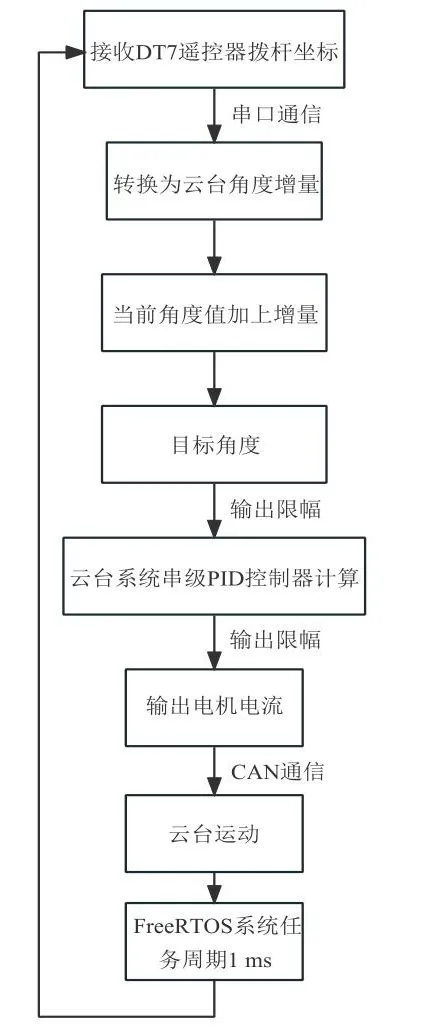
圖4 云臺任務(wù)程序流程框圖
3 云臺系統(tǒng)樣機(jī)測試
3.1 樣機(jī)參數(shù)介紹
本設(shè)計的農(nóng)業(yè)巡檢機(jī)器人樣機(jī)由底盤系統(tǒng)和云臺系統(tǒng)構(gòu)成,其中,該機(jī)器人的云臺系統(tǒng)設(shè)計了一種新的結(jié)構(gòu)和控制系統(tǒng),四個輪轂電機(jī)為底盤提供驅(qū)動力。為了實現(xiàn)農(nóng)業(yè)巡檢的功能并且提高其運動的自由度,本研究設(shè)計了具有兩個自由度的云臺系統(tǒng),具有較好的載重性能,便于搭載實現(xiàn)巡檢所需的工業(yè)攝像頭、工控機(jī)、傳感器等設(shè)備,用于實現(xiàn)信息的處理與傳輸[9-10]。底盤系統(tǒng)和云臺系統(tǒng)之間使用了來自歐姆龍公司的24線導(dǎo)電滑環(huán)進(jìn)行連接,在實現(xiàn)模塊間解耦的同時保證了云臺YAW軸方向的360°自由旋轉(zhuǎn)。樣機(jī)實機(jī)圖片如圖5所示,該巡檢機(jī)器人樣機(jī)的主要外形參數(shù)如表1所示,經(jīng)測試所得的部分性能參數(shù)如表2所示。
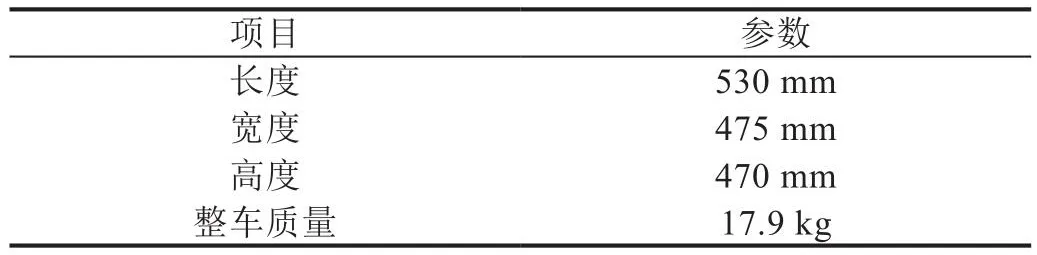
表1 巡檢機(jī)器人的外形參數(shù)表
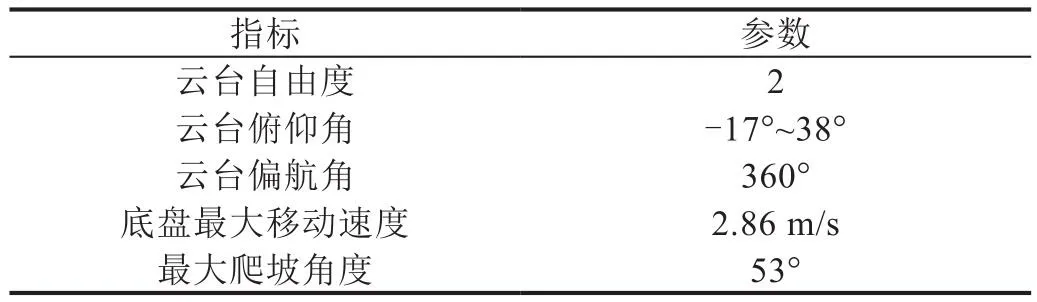
表2 巡檢機(jī)器人部分性能參數(shù)表
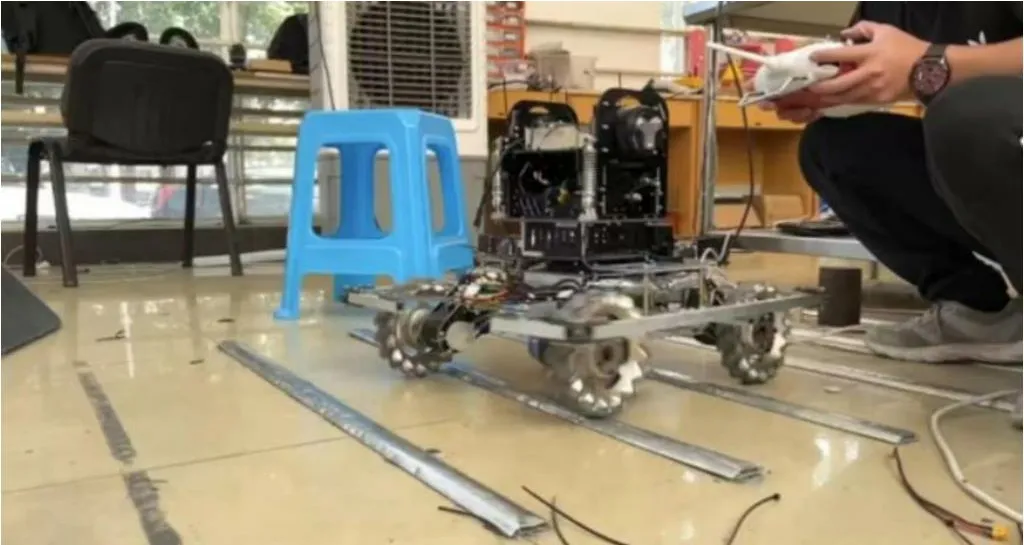
圖5 樣機(jī)實機(jī)圖片
3.2 電機(jī)部件選型及數(shù)量
基于上述分析需求,本研究設(shè)計的機(jī)器人底盤電機(jī)選用大疆創(chuàng)新公司的M3508減速電機(jī)搭配定制FOC電調(diào)C620,具有速度快、扭矩適中、便于安裝、體積較小的優(yōu)點。
云臺電機(jī)選用了大疆創(chuàng)新的GM6020電機(jī)作為動力來源,具有高扭矩、高控制精度的特點,保證了云臺控制的準(zhǔn)確性和穩(wěn)定性,提高了云臺系統(tǒng)的載荷能力,能夠搭載更多適用于巡檢的工業(yè)攝像頭以及數(shù)據(jù)處理設(shè)備,增加了巡檢設(shè)備的搭載量,電機(jī)具體性能指標(biāo)如表3所示。

表3 電機(jī)性能指標(biāo)表
3.3 實機(jī)測試
基于以上設(shè)計的云臺系統(tǒng),加入底盤系統(tǒng)便于進(jìn)行實機(jī)測試,測試環(huán)境為實驗室模擬環(huán)境,云臺YAW軸初始角度為0°,對云臺系統(tǒng)施加不同目標(biāo)角度的階躍信號,通過上位機(jī)量化觀察云臺系統(tǒng)外環(huán)角度控制的響應(yīng)速度、靜差、超調(diào)量,將數(shù)據(jù)導(dǎo)入MATLAB中對齊各組數(shù)據(jù)的時間坐標(biāo)。5°、10°、15°、20°云臺系統(tǒng)階躍響應(yīng)實驗圖像分別如圖6至圖9所示。
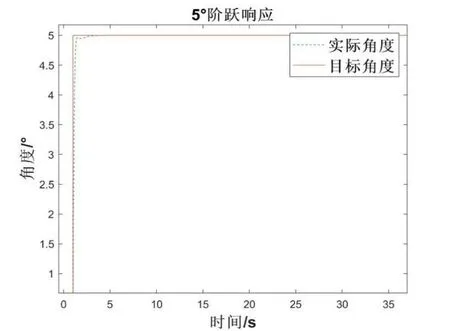
圖6 5°云臺系統(tǒng)階躍響應(yīng)圖
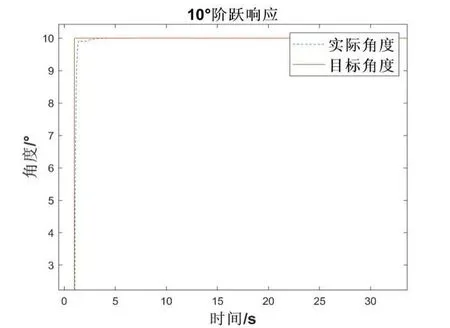
圖7 10°云臺系統(tǒng)階躍響應(yīng)圖
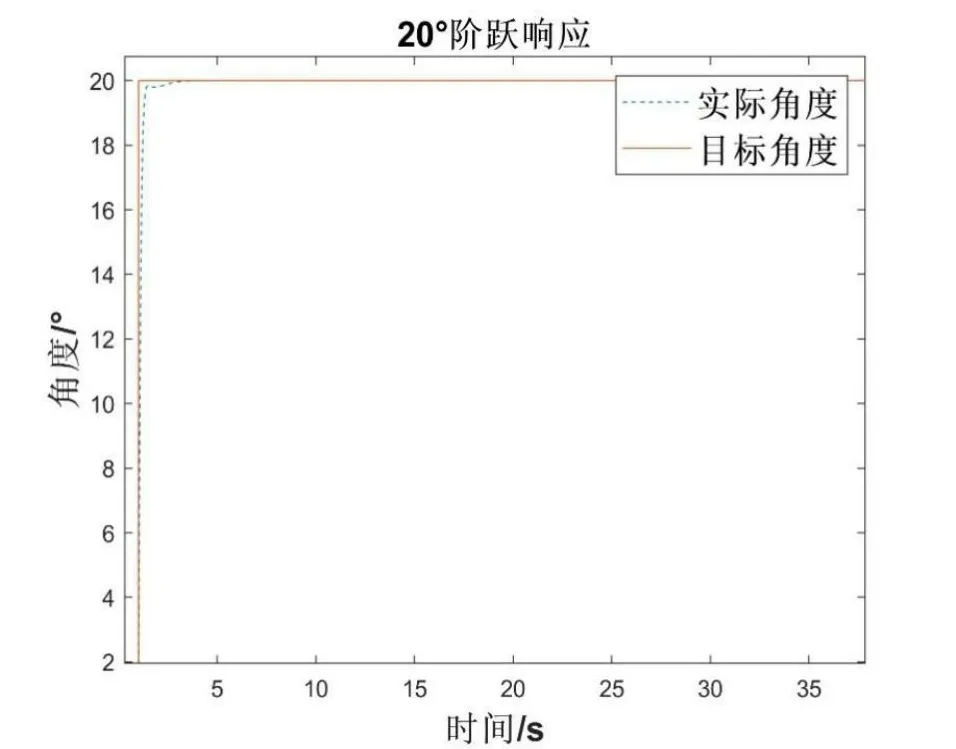
圖9 20°云臺系統(tǒng)階躍響應(yīng)圖
通過采樣數(shù)據(jù)得出性能指標(biāo),具體如表4所示。
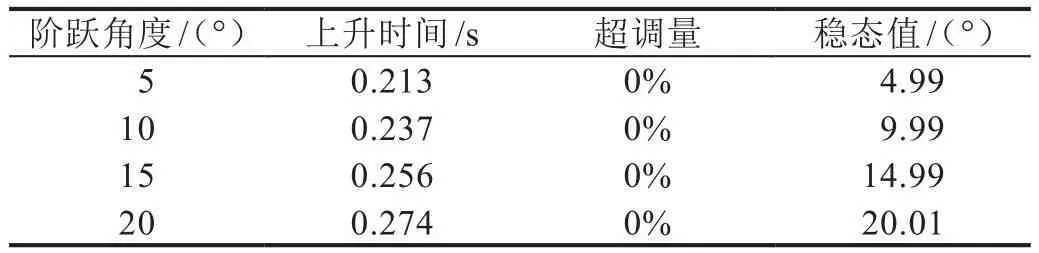
表4 云臺系統(tǒng)階躍響應(yīng)指標(biāo)表
通過實驗可得:該云臺系統(tǒng)的角度階躍響應(yīng)速度能夠達(dá)到毫秒級,在較大幅度的角度階躍變化中也能夠有較好的響應(yīng)速度,同時,基本實現(xiàn)了無超調(diào)、無靜差控制,具有較好的魯棒性和快速性,能夠適應(yīng)后續(xù)農(nóng)業(yè)巡檢的復(fù)雜工作環(huán)境。
4 結(jié)論
1)本研究通過綜合考慮當(dāng)前農(nóng)業(yè)巡檢領(lǐng)域的發(fā)展趨勢以及應(yīng)用需求,提出了一種滿足農(nóng)業(yè)巡檢環(huán)境高精度、快速響應(yīng)和輕量化要求的云臺系統(tǒng)設(shè)計方案。2)在系統(tǒng)設(shè)計中,運用串級PID控制算法,遵循輕量化設(shè)計原則,實現(xiàn)云臺系統(tǒng)的性能優(yōu)化,有助于確保云臺系統(tǒng)在復(fù)雜農(nóng)業(yè)環(huán)境下的穩(wěn)定性和靈活性。3)通過設(shè)計樣機(jī)進(jìn)行實驗驗證,結(jié)果表明,本研究設(shè)計的云臺系統(tǒng)在控制精度和響應(yīng)速度方面取得了較好的效果。該系統(tǒng)能夠以毫秒級的響應(yīng)速度穩(wěn)定地跟隨角度變化,并同時實現(xiàn)了無超調(diào)和無靜差的控制效果。4)本研究提供了一種新穎的云臺系統(tǒng)設(shè)計方案,其在控制精度、響應(yīng)速度和輕量化方面具有較多優(yōu)點,將為農(nóng)業(yè)領(lǐng)域的巡檢任務(wù)帶來更高效率和可靠性的技術(shù)支持。5)未來的研究方向可以進(jìn)一步完善云臺系統(tǒng)的控制策略,以適應(yīng)更為復(fù)雜多變的農(nóng)業(yè)巡檢環(huán)境。這將進(jìn)一步推動農(nóng)業(yè)智能化的發(fā)展進(jìn)程,為實現(xiàn)農(nóng)業(yè)生產(chǎn)的高效、精準(zhǔn)和可持續(xù)發(fā)展作出積極貢獻(xiàn)。
猜你喜歡
今日農(nóng)業(yè)(2022年1期)2022-11-16 21:20:05
今日農(nóng)業(yè)(2022年3期)2022-11-16 13:13:50
今日農(nóng)業(yè)(2022年2期)2022-11-16 12:29:47
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
今日農(nóng)業(yè)(2021年14期)2021-11-25 23:57:29
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
