基于慧魚組合式智能蓮藕采洗分揀一體裝置的研究
2023-11-03 08:49:12周美丹
南方農機 2023年22期
關鍵詞:智能
周美丹
(江西機電職業技術學院,江西 南昌 330013)
0 引言
蓮藕細嫩光滑、鮮嫩脆爽、口感好且具有藥食同源價值,但由于蓮藕的生長環境特殊,采摘和收獲過程較為困難,蓮藕好吃,挖藕卻難。挖藕一直是藕農們的一大難題,也是蓮藕產業發展路上的“攔路虎”。挖藕機是一種新型的農業機械,它的出現為農業生產帶來了新的機遇和挑戰[1-3]。通過市場調查和資料分析,筆者發現市場上的挖藕機絕大多數還需人工入水參與采挖或收集,采收過程中蓮藕損壞率高,而挖藕機功能單一,且價格較高,普通藕農難以承受[4-5]。另外,挖藕機的使用需要一定的技術水平,一些農民缺乏相關的技術知識。因此,挖藕機行業需要加強技術研發,降低產品成本,開發出功能齊全且便于藕農使用的挖藕機[6-9]。
為此,本文設計了一款慧魚組合式智能蓮藕采洗分揀一體裝置——“與‘藕’相伴”[10]。本設計以ROBO Pro智能控制系統為核心,將各模塊(沖壓裝置、攔截裝置、打撈裝置、傳送裝置、分揀裝置、阻斷裝置、換箱裝置、智能倉儲裝置、智能抓取裝置、驅動裝置)集于一體。通過高壓噴頭,沖散淤泥中的藕,使其漂浮于水面,繼而對水面上的藕進行攔截、打撈,在傳送過程中對藕進行多次清洗、智能分揀,最后完成收集、倉儲,實現采藕作業全過程智能化、自動化、無人化。
1 創作思路與作品構思
1.1 創作思路
通過比對分析市場上挖藕機的功能特點和藕農的需求,發現蓮藕采收面臨的痛點問題為勞動強度大、效率低,采收上來的蓮藕品質差,挖藕機功能單一、操作不便利等。為解決市場痛點,研究團隊通過研究蓮藕采挖關鍵技術,設計研發了一款漂浮船式挖藕機,作品整體圖如圖1所示。

圖1 作品整體圖
作品“與‘藕’相伴”集沖壓、采收、傳送、清洗、收集、倉儲于一體,智能控制機器自動完成所有工作,無需人工下水,挖藕效率高、挖藕質量好、操作便利、使用穩定,將成為藕農們的“好幫手”。
1.2 作品構思
研究團隊通過深入蓮藕種植基地調研、實地挖藕探究、資料查閱,獲取設計靈感,作品具有操作自動化、功能模塊化、智能化等特點。
1.2.1 沖壓系統
該系統通過高壓噴頭,沖散淤泥中的藕,使其漂浮于水面。
1.2.2 攔截系統
攔截系統主要包括傳動和攔截兩部分。電機啟動,通過鏈條帶動螺桿旋轉,繼而將擋板推出。隨后通過齒輪與連桿相結合的方式驅動擋板展開,從而攔截塘內漂浮在水面上的蓮藕。
1.2.3 傳送系統
傳送系統由打撈裝置和傳送裝置組成。打撈裝置中的滾筒將蓮藕打撈至傳輸帶,蓮藕由傳輸帶傳送至傳送裝置。在傳送過程中,噴頭對蓮藕進行首次沖洗,履帶將蓮藕傳送至下一系統。
1.2.4 清洗系統
蓮藕被打撈至履帶,在運輸過程中多頭噴管對其進行第一次粗洗。蓮藕送入傳送裝置后,多頭噴管和旋轉毛刷對其進行精洗,洗凈后的蓮藕通過履帶傳送至下一系統。
1.2.5 倉儲系統
履帶將洗凈后的蓮藕運送至儲存箱中,儲存箱裝滿后智能夾取裝置自動將其抓取至倉儲間進行堆疊存放。裝置后方設有大型儲存間,以便挖藕機在水上進行長時間的工作,減少靠岸卸貨次數,提高挖藕機的工作效率。存儲間配備升降艙門,使裝置形成半封閉空間,提高倉儲存儲的穩定性,還可便于打開艙門進行卸貨。
1.2.6 智能識別系統
通過攝像頭智能識別傳輸當中的壞藕或陳藕,便于機械臂挑選分離;利用In-Sight軟件智能視覺系統對蓮藕儲存箱箱體容量進行智能化識別,便于及時換箱。
2 作品創新
“與‘藕’相伴”——智能采洗分揀一體機相對市場上其他類型挖藕機,具有以下創新點。
1)功能豐富,高效工作。除了能夠挖藕,還具有清洗、篩選、倉儲等其他功能,滿足藕民的多元化需求。
2)不需抽水,漂浮工作。對比傳統履帶式采藕設備,“與‘藕’相伴”——智能采洗分揀一體機不需要將池塘水位降低,節省了抽水時間以及電量的消耗,符合國家對綠色農業的要求。
3)智能識別,分揀換箱。通過攝像頭智能識別傳輸中的壞藕或陳藕,自動完成蓮藕篩選工作;智能識別儲存箱是否存滿,便于及時自動換箱,提高工作效率。
4)智能倉儲,節約能耗。挖藕機后方配備一個大型倉儲間,內設有升降門,使其形成半封閉空間,提高了倉儲儲存箱堆疊的穩定性,智能機械平臺對儲存箱進行自動堆疊,可存放大量貨物,減少挖藕機往返卸貨次數。
3 結構與工作原理
3.1 智能控制部分
本裝置的控制系統由ROBO Pro控制軟件、TXT接口板和傳感器組成。程序圖如圖2所示,通過編寫控制程序,接通TXT開關自動啟動程序,實現精確控制。本裝置的3個TXT控制器可對各電機、傳感器的運行狀態進行監控,進一步保證了蓮藕采收船運行的可靠性。
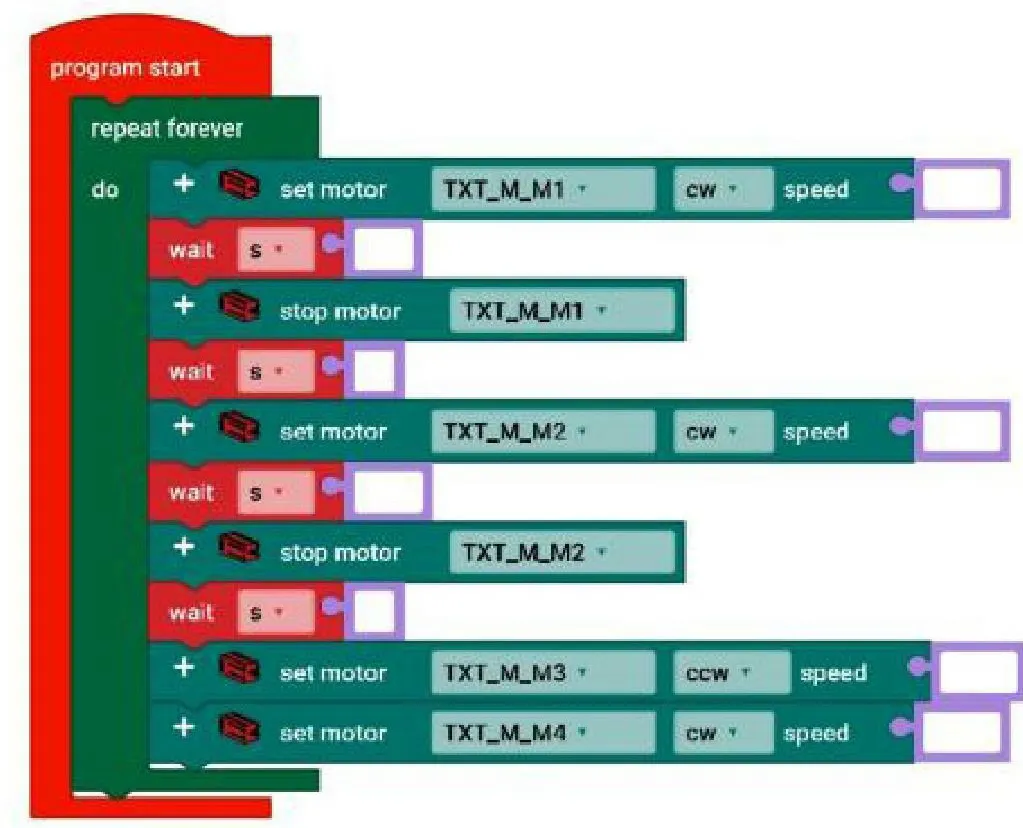
圖2 程序圖
3.2 沖壓裝置
沖壓裝置如圖3所示,挖藕機開始工作時,水泵從藕塘中抽水,通過加壓裝置對水進行加壓,利用從噴水槍口噴出的高壓水柱對藕塘的淤泥進行沖壓,沖散淤泥中的蓮藕,從而使淤泥中的蓮藕浮出水面。
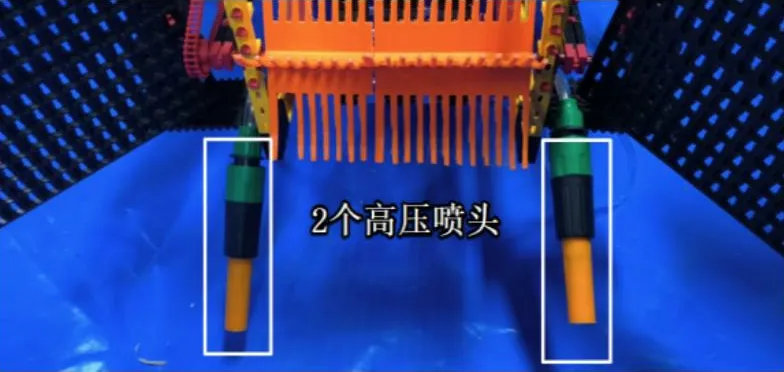
圖3 沖壓裝置
3.3 攔截裝置
攔截裝置如圖4所示,采收開始時,通過螺旋傳動推出擋板,隨后通過齒輪齒條傳動驅動擋板展開,從而攔截塘內漂浮在水面上的蓮藕,采收結束后,擋板收回。

圖4 攔截裝置
3.4 打撈裝置
打撈裝置如圖5所示,當滾筒到達指定收集位置后,啟動電機帶動滾筒開始運作,攔截區域內的蓮藕,蓮藕會隨著滾筒的旋轉被運輸至履帶。繼而,裝置中的噴水管開始噴水柱,對蓮藕進行初步沖洗,完成蓮藕的打撈和第一次清洗工作。

圖5 打撈裝置
3.5 傳送裝置
傳送裝置如圖6所示,在打撈裝置中經過初洗后的蓮藕隨著履帶傳送至傳送裝置(長履帶部分),噴頭將水以水霧的形式噴至蓮藕和軟毛刷上,軟毛刷旋轉,對蓮藕進行精洗工作,隨后將蓮藕傳送至分揀裝置。傳送裝置采用鏈傳動,使裝置平均傳動比更準確,工作更加可靠,效率更高。

圖6 傳送裝置
3.6 分揀裝置
分揀裝置如圖7所示,分揀裝置通過攝像頭對運輸過程中的蓮藕進行圖形識別,如若識別到壞藕或陳藕,夾爪將會啟動。在攝像頭的定位下,夾爪全方位運動,自動抓取壞藕或陳藕,并將其運送至滑道,壞藕從滑道中滑出。

圖7 分揀裝置
3.7 阻斷裝置
阻斷裝置如圖8所示,阻斷裝置中的氣動電機連接氣泵,帶動閥門進行上下運動,實現阻斷門開啟和關閉。當攝像頭識別到儲存箱存儲滿之后,阻斷裝置中的電機啟動,兩個氣缸將擋板往下推,阻斷傳送帶中正在傳送的蓮藕,同時,傳送裝置的傳送速度自動降低,防止傳送帶上的蓮藕堵塞。當換箱裝置完成換箱后,攝像頭再次進行識別,阻斷裝置擋板上升,同時傳送帶恢復原有傳送速度。
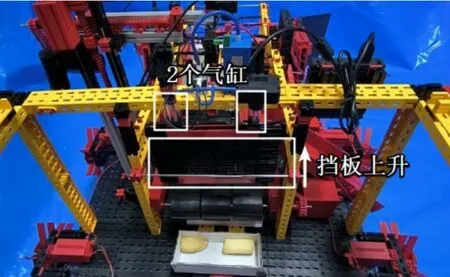
圖8 阻斷裝置
3.8 換箱裝置
換箱裝置如圖9所示,當阻斷擋板降下,儲存框被機械夾爪夾走,微碼電機啟動,通過螺桿旋轉帶動夾爪向前運動,推出新的儲存箱,從而實現儲存箱更換。

圖9 換箱裝置
3.9 智能倉儲裝置
智能倉儲裝置由倉儲裝置和智能抓取裝置兩部分構成,如圖10所示。

圖10 智能倉儲裝置
3.9.1倉儲裝置
裝置后方配備一個大型倉儲間,可存放大量貨物,同時還配有升降門,便于儲存框存放和卸貨。升降門通過鏈傳動和齒輪傳動驅使升降。爬升時:傳遞動力大,壽命長,工作平穩,可靠性高;下降時:重力下沉,勻速下降,效率高。
3.9.2 智能抓取裝置
當儲存框被推出時,智能抓取裝置通過導軌移動到箱體上方對其進行抓取。裝置設有自動升降機構,可在倉庫內全方位移動進行貨物堆疊。前后:微碼電機帶動齒輪嚙合驅動負重輪,使其在導軌上進行前后運動,負重輪上有橡膠包裹,用于增加摩擦力。左右:鏈條連接夾爪,在兩端設有微碼電機,工作時微碼電機帶動齒輪傳動,實現左右精確運動。抓取:兩根螺桿并排衡置,通過齒輪傳動控制兩螺桿移動,達到使夾爪開合的目的。爬升:通過齒輪與齒條嚙合進行爬升,傳遞動力大,壽命長,工作平穩,可靠性高。
3.10 行駛裝置
行駛裝置如圖11所示,行駛裝置由編碼電機帶動鏈傳動,驅動6個槳葉輪快速旋轉,實現挖藕機在水面上行駛。左右兩側對稱分布3個槳葉輪,可以更好地控制方向,實現船體的全方位平穩運行。

圖11 行駛裝置
4 推廣應用價值
“與‘藕’相伴”作為新型的挖藕機,具有如下應用價值:
1)自動化程度高,減少人工投入。從采藕、清洗、篩選、收集、倉儲到搬運,全程通過程序智能控制,自動完成所有工序。僅需操作員,無需其他人工投入,大大降低了人工成本,成功將“體力活”變成“技術活”,實現科技助農。
2)功能豐富,工作效率高。不僅能夠挖藕,還具有清洗、篩選、倉儲、搬運等其他功能,且各模塊連續作業,工作效率高,滿足藕農的多元化需求。
3)蓮藕采收品質高。利用水槍沖泥來采收,不會對蓮藕造成損傷,保證了蓮藕的完整、品相和品質。
4)操作簡單。只需要在手機或電腦端點擊開關控制按鈕,即可完成一系列工作,對使用者無技術要求,解決了藕農招工難的問題。
5)減少對土地的破壞。采用噴頭沖壓采藕,減少了對環境的破壞,保護了生態環境。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44
