
小型磁光克爾顯微鏡的設計與研發
2023-11-03 09:30:16郭金壕郭憲增劉寶佳
物理實驗 2023年10期
關鍵詞:效應
郭金壕,孫 奇,郭憲增,劉寶佳,雷 娜
(北京航空航天大學 集成電路科學與工程學院,北京 100191)
磁性材料作為金屬功能材料的重要分支,在科技進步中扮演關鍵角色,磁性材料的發展推動各領域持續進步和創新,已廣泛應用于電聲、選礦、能源、家電、醫療、汽車、自動控制和信息技術等領域[1]. 磁疇是磁性材料的基本磁學屬性,磁疇信息的觀測和分析對于磁性材料的研究和應用具有重要意義. 磁光克爾顯微鏡(Magneto-optical Kerr microscope, MOKE)是一種非接觸式磁性表征儀器,具有高分辨率、非破壞性等優點,可以用來研究多種類型的磁性材料,如磁性薄膜、磁性納米顆粒、磁性多層膜等,在磁學、材料科學、納米科學等領域有廣泛的應用. 對磁性物理的深入理解有助于科技發展,如自旋芯片、磁存儲和磁共振成像等. 當前市場上,面向大眾的與“磁性”相關的教學科普儀器大多圍繞著“磁力”進行設計,少有涉及磁性材料微觀結構的產品. 若要觀測磁疇,科研和工業上常用的磁光克爾測量系統的體積龐大、價格昂貴(達百萬級),難以適用于教學與科普工作. 本文設計并搭建了小型磁光克爾顯微鏡Triple-M,Triple-M顯微鏡通過簡單操作即可展示磁的基本微觀性質——磁疇,并能實現磁光克爾顯微鏡的小型化和低成本化,以便讓大眾有機會深入了解磁的微觀世界.
1 物理理論基礎
1.1 磁疇
鐵磁性物質中會形成磁疇. 在單個磁疇內,相鄰原子或離子的磁矩由于海森堡交換耦合相互作用而傾向于平行排列,磁矩方向保持一致. 但是不同磁疇之間的磁矩排列方向不同(圖1),因此磁性材料的性質與磁疇結構密切相關. 通過施加外磁場可以改變甚至消除磁疇結構,當所施加的磁場強度增大時,磁疇區域會逐漸合并直至消失,呈現單疇的飽和磁化狀態.
利用磁疇方向的不同可以存儲信息,大容量磁硬盤即利用了磁疇的性質,圖2是硬盤中不同磁道的磁疇圖像.
1.2 磁光克爾效應
磁光效應是光與被磁化物質相互作用引發的多種光學現象,包括磁光克爾效應、科頓-穆頓效應(磁雙折射效應)、塞曼效應和磁光法拉第效應等,這些效應都依賴于物質的磁化狀態,反映了物質磁性與光之間的相互作用,被廣泛應用于磁性材料的研究和技術探索. 目前,最常用的磁光效應為磁光法拉第效應和磁光克爾效應,分別對應光線經過磁性物質透射和反射的情形. 對于磁光克爾效應,當線偏振光從帶有磁矩的介質表面反射時,反射光會變成橢圓偏振光,并且偏振方向產生旋轉,旋轉角度為克爾轉角,如圖3所示.

(a)入射光 (b)反射光
按磁化強度相對于入射面的取向劃分,磁光克爾效應可分為極向、縱向和橫向3種類型,如圖4所示. 其中,極向磁光克爾效應為磁化強度矢量M與介質界面垂直時的克爾效應,是3種類型中克爾轉角最大、最為明顯.縱向磁光克爾效應指當磁化強度矢量M既平行于光的入射面,又平行于介質表面時的克爾效應. 橫向磁光克爾效應指磁化方向平行于材料表面但垂直于入射面的克爾效應. 在橫向磁光克爾效應中,只有微小的反射率變化,不存在偏振面的旋轉現象,其最大的優點在于,即使是非極化光源經由磁性介質反射,其反射光的振幅也仍然是磁光強度矢量的線性函數[3]. 本文主要應用極向克爾效應.

(a)極向 (b)縱向 (c)橫向
2 光 路
2.1 測量原理
光源發出的光經過起偏器轉為線偏振光,再經樣品反射,通過檢偏器后被相機接收. 檢偏器的偏振方向應與起偏器的消光方向有很小的角度δ,該角度主要用于區分樣品的磁化方向.
當檢偏器與起偏器的偏振方向垂直時,由于樣品磁化產生磁光克爾效應,經過起偏器的線偏振光在通過樣品后發生偏轉. 根據馬呂斯定律,檢偏器接收的光強不再為零,相機可探測到光信號,如圖5所示. 在此構型下,無論反射光的偏振面是沿順時針還是逆時針方向旋轉,相機所探測到的光強都將增加,無法區分偏振面的旋轉方向,從而無法確定樣品的磁化方向. 針對該問題,通常將檢偏器的方向旋轉微小的偏角δ. 當反射光的偏振面發生順時針(逆時針)旋轉時,相機探測的光強將增加(減少),據此可判斷樣品的磁化方向,如圖5所示.

圖5 偏振器的方位圖
設入射光為p偏振光,其電場矢量為Ep,與其垂直的電場矢量為Es,考慮極向磁光克爾效應的一階近似,通常Es?Ep,且

(1)
則通過檢偏器的光強為
I=|Epsinδ+Escosδ|2.
(2)
由于δ一般很小,故可以認為sinδ≈δ, cosδ≈1,化簡得到
I=|Ep|2|δ+θk+iεk|2,
(3)
盡管δ很小,但δ?θk,略去二階小量后進一步化簡得到
I=|Ep|2(δ2+2δθk).
(4)
無外加磁場時,
I0=|Ep|2δ2,
(5)
則可測得在任意時刻下的克爾轉角為
(6)
偏角δ很小時,克爾轉角θk與光強I成線性關系,故可用相機成像直接表征磁化強度[4].
2.2 光路系統
2.2.1 核心光路結構
采用“T”型光路設計,如圖6所示. LED光源發出的光經光闌限制出射角度,后經透鏡轉為平行光,再經起偏器轉為線偏振光. 隨后光線經45°放置的半反半透鏡反射,并由物鏡聚焦到樣品表面,經樣品反射后,線偏振方向已轉動一定角度,再次經物鏡轉為平行光,通過檢偏器,最終聚焦到相機.

圖6 內部光路圖
在上述光路結構中,LED光經過光闌限制其發散角度,透過凸透鏡后產生平行光,因此理論上LED光源應置于凸透鏡焦點位置. 該平行光經起偏器轉化為線偏振光,入射到半透半反鏡,經反射后通過物鏡照射到樣品上,以上為入射光路,物鏡的作用是確保平行光入射聚焦到樣品上. 樣品反射的出射光經物鏡、半反半透鏡的透射,再經凸透鏡聚焦到相機上成像. 其中光線經過檢偏器,檢測樣品磁化導致的線偏光的偏振轉角.
2.2.2 籠式結構
在光學系統的構建中,傳統的光學機械缺乏基準系統,很難確定系統中各元件之間的共軸誤差,這對構建小型科普、教學系統具有一定的挑戰,因此本項目選用籠式結構.
籠式結構在搭建光學系統時,將光軸以光學平臺為基準參考,進而保證系統中各元件之間的同軸性. 光軸、籠桿和光學平臺相互平行,確保該光路系統的基準,降低實驗者調節光路的難度,如圖7所示.
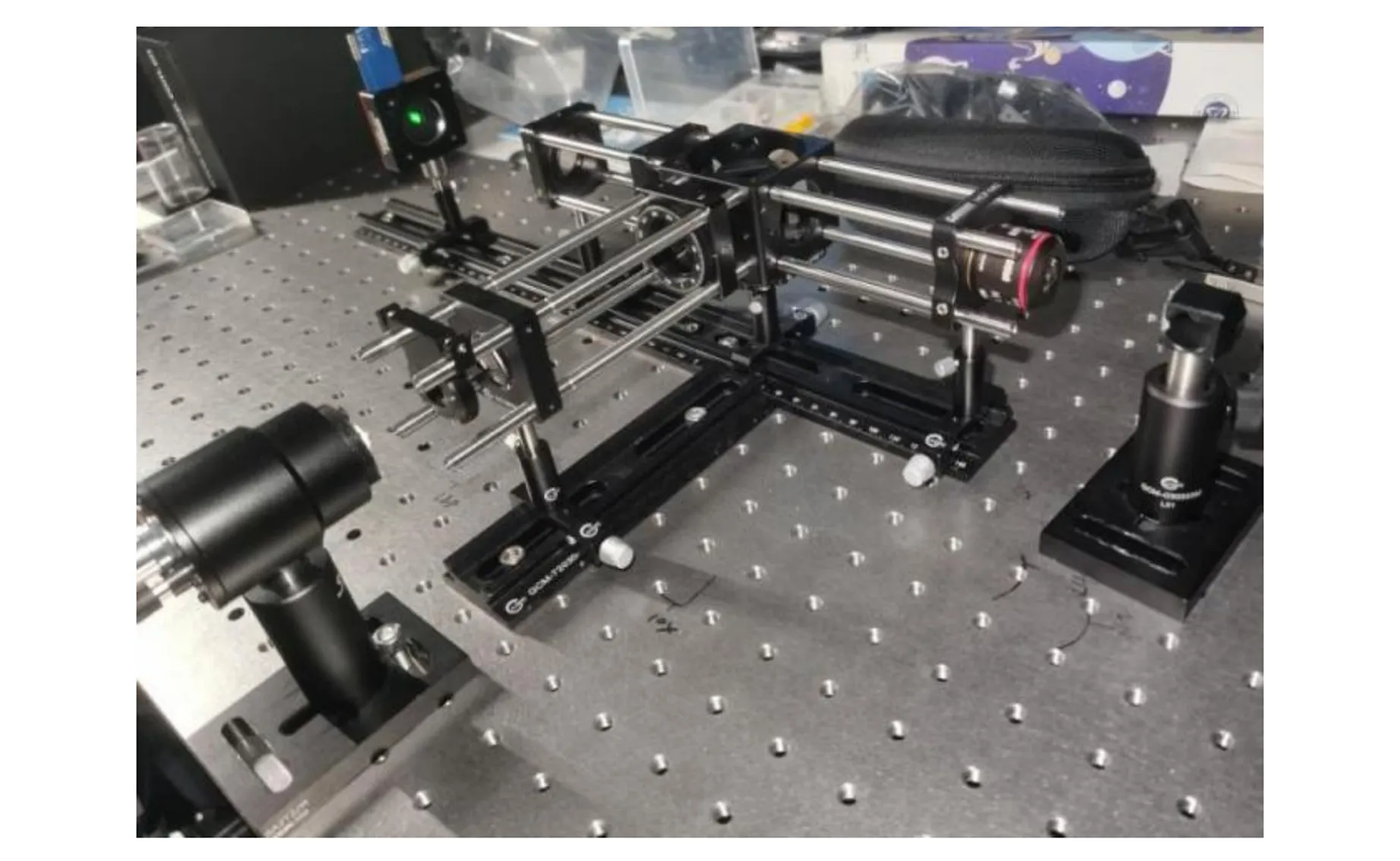
圖7 SIGMAKOKI籠式系統
2.2.3 物鏡
在測量磁光克爾效應的過程中,光斑的大小對于實驗精度的影響至關重要,更小的光斑意味著更好的實驗精度. 在光路中引入物鏡能夠進一步減小樣品上的光斑大小,提高實驗精度.
本項目選擇Olympus MPLFLN 5×物鏡[3],配套筒鏡使用焦距為18 cm的凸透鏡.
2.2.4 光源
本項目選用非相干光源DHC GCI-0604系列LED的GCI-060401,其功率為3 W,燈珠發散角為120°,紅光波段為(620±10) nm,具有較高的穩定性與精度,可滿足實驗需求.
2.2.5 相機
可見光的衍射極限約為300 nm,在放大倍率為5×時,為保證觀測效果,CMOS的像素尺寸應為1.5 μm. 綜合考慮光路系統的分辨本領,采用像素尺寸為3.45 μm×3.45 μm的CS165MU/M-Zelux?CMOS黑白相機[5]. 較大的像素尺寸有助于提升成像質量. 該相機使用CMOS傳感器,是一款超緊湊、輕量型的科研相機,兼具較高的經濟性. 相機通過MMCX接口外部觸發,實現與外部設備同步的圖像采集. 此外,該相機具有較低讀出噪聲和高靈敏度,全局快門能夠同時采集整個視場,適用于快速變化場景的成像.
2.2.6 偏振元件
實驗中需要使用2個偏振器件,分別用作起偏器和檢偏器. 本項目選擇高性價比的二向色薄膜偏振片LPVISE2X2. 該偏振片適用于可見光(400~700 nm),在530~690 nm波長范圍內的消光比可大于5000∶1,滿足磁光檢測需求.
3 封 裝
為了進一步縮小設備體積,基于“T”型光路進行3D建模并設計了外殼和封裝,具體建模如圖8所示. 由于光路系統十分精密,容許誤差僅有0.5 mm. 為提高CMOS相機采集圖像的穩定性和精度,3D打印選擇硬度較好的樹脂材料,外殼為黑色,厚度為3 mm.

圖8 外殼封裝3D建模
通過不斷地優化和實驗調整,內部光路的集成效果如圖9所示. 核心透鏡組尺寸為12 cm×10 cm×5 cm. 將光源和相機集成,從而實現完整的內部光路,尺寸為19 cm×16.5 cm×5 cm.

圖9 核心光路透鏡組
光路采用“T”型結構提高了空間的利用率,圖10是本產品與國際領先的商用克爾系統對比照片,紅色方框標出為Triple-M.

圖10 Triple-M與英國商用設備的比較
4 磁疇的觀測
4.1 測量方法
1)將待測樣品置于物鏡鏡頭前,連接CMOS相機和計算機成像軟件ThorCam進行成像.
2)開啟LED光源并調整LED輸出功率和光闌,直至獲得合適的圖像亮度.
3)調整起偏器和檢偏器,使得兩偏振方向的夾角處在消光角度附近,同時關注ThorCam中的Max Intensity參量,使其達到最小值.
4)調整樣品與物鏡之間的距離,以獲得清晰的樣品表面圖像.
5)將磁鐵置于樣品附近,用以改變空間磁場,并觀察相機拍攝的畫面,從而得到樣品表面磁疇的變化.
6)借助軟件,對相機捕獲到的圖像減去本底,可得到更加清晰明顯的磁疇圖像.
此外,還設計了磁針書寫平臺,如圖11所示,其原理是利用通過被磁化過的小磁針,將其細針尖置于磁性薄膜表面附近,引起小區域范圍內的磁疇翻轉,從而可以自行DIY磁疇圖案.

圖11 磁針書寫系統
4.2 測試結果
在不同磁場中拍攝圖像,將圖像減去本底,使磁疇的輪廓更加清晰,如圖12所示,3張圖像是在同一次磁疇翻轉過程中按順序保存所得,可以看到:磁場改變的過程中,磁疇也發生了翻轉,白色的磁疇面積逐漸增大,觀測成功.

(a)
圖12表明:當使用磁鐵改變樣品表面區域的磁場時,其表面的磁疇確實發生了變化,并且被Triple-M拍攝. 同時,利用磁針書寫平臺繪制磁疇圖案,并用Triple-M觀測,如圖13所示.

(a)
5 部分問題及解決方案
如何將光路集成、小型化是本項目的重難點. 設置的δ為1°,經計算,光線的克爾轉角僅為0.02°,同時最大光強與本底光強的比值為1.038∶1,如圖14所示,待觀察的信號極其微弱,使得該設備對靈敏度有很高的要求.

(a)本底光強
然而在對光路進行小型化集成的過程中,本項目刪減了部分偏優化功能的器件(如1/4波片等),只保留必要元件,并將光路尺寸縮小,此時由于不再符合傍軸成像,導致球差(圖15)、像散(圖16)等非理想光學誤差影響增大[6],同時仍需保證設備具有高靈敏度,因此必須對各個元件的參量和位置進行精密的計算和布置,并進行多次實地調試,最終得到集成小型化成品.

圖15 球差[6]
在本項目的研究制作過程中,以設計既方便攜帶又可簡潔地觀測到磁疇圖像的產品為目標,適用于多種應用場景的需求. 這些場景包括:科普磁信號的本質,教學授課時提高教學效果,科研過程中對薄膜材料表面磁疇信號的觀測,作為青少年兒童的玩具,幫助挖掘物體磁性和當代磁信息的本質,等等.
為了保證穩定性,該設備光路采用籠式結構,同時對“T”字型光路進行了精密的3D建模,并打印外殼對其進行外部封裝,采用高強度吸光樹脂材料,增強了成像系統的穩定性;同時,還對圖像做軟件處理,通過減去本底,提升磁疇的觀測效果.
Triple-M的部分參量如表1所示,其中數值孔徑是由物鏡參量所得,分辨率為CMOS相機的像素尺寸與放大倍數的比值,放大倍數是由幾何光路中的像距與物距計算所得,工作距離即待測樣品與物鏡的距離,視場由CMOS相機的成像區域與放大倍數作比所得.

表1 顯微鏡的部分參量
此外,Triple-M與國際領先的英國磁光系統NanoMOKE3的重要參量對比如表2所示. 可見,該設備的磁探測精度稍遜于商用系統,但在體積、成本與成像速度方面有明顯優勢.

表2 與英國磁光系統NanoMOKE3的參量對比
6 結束語
目前磁科學在大眾之間的普及程度僅限于磁力,市面上有關磁的科普產品也只涉及吸引力、排斥力,少有涉及磁的微觀世界. 一門學科想要發展,需要更多的人對其產生興趣,這樣才能產生源源不斷的新生血液注入其中. 磁科學想要蓬勃發展,始于其微觀世界的大眾化普及就顯得尤為重要,該研究項目為磁科學的科普工作提供了小型化、低成本的磁光克爾顯微鏡. 本項目后續將進一步優化,達到用人眼替代CMOS相機捕獲磁疇圖像的程度,并進一步簡化儀器的結構,降低成本. 同時,直接使用人眼觀測磁疇圖像,也能降低儀器的操作難度,增加人機互動,提升趣味性,對于儀器的普及和教學、科普的效果具有極大的提升作用. 但這也對光源和光路的靈敏度與精度提出了更高的要求. 后續將以此為目標,在內部結構上進一步優化,使得顯微鏡的操作步驟更加簡潔,實現功能優化.
猜你喜歡
核科學與工程(2021年4期)2022-01-12 06:30:26
今日農業(2020年19期)2020-12-14 14:16:52
小學生必讀(中年級版)(2020年9期)2020-12-04 02:07:22
科學大眾(2020年17期)2020-10-27 02:49:10
紅土地(2018年11期)2018-12-19 05:10:56
意林·全彩Color(2018年9期)2018-11-13 22:49:38
中學物理·高中(2016年12期)2017-04-22 11:53:03
中國衛生(2016年4期)2016-11-12 13:24:14
中國衛生(2014年4期)2014-12-06 05:57:14
小櫻桃·童年閱讀(2014年11期)2014-12-01 22:21:30
