基于模糊控制的智慧城市路口交通燈配時優化方法
2023-11-08 10:53:58傅正陽鄭江萍
交通建設與管理 2023年5期
李 斌,傅正陽,鄭江萍
(杭州市公安局交通警察支隊西湖大隊,浙江 杭州 310000)
0 引言
近年來,隨著智慧城市的不斷發展,城市交通面臨的壓力逐漸增大,特別是在路況復雜的交通路口,容易因為交通燈配時標準不合理而出現擁堵現象。針對該問題,陳海洋等[1]引入克隆選擇算法,對克隆抑制算子與種群刷新算子進行改進,將交通燈狀態設置問題轉換成克隆選擇算法搜索最優解問題,實現智慧城市路口交通燈配時優化,但該方法在實際應用中優化效果不佳,路口仍出現擁堵問題。陳小紅等[2]研究了不確定交通需求下的交叉口信號配時區間優化模型,通過構建信號配時參數區間非線性多目標規劃模型,采用多層嵌套遺傳算法求解方式實現對交叉口信號配時區間的優化,但該方法的控制效果也不理想。本文引入模糊控制理論,設計了一種新型的智慧城市路口交通燈配時優化方法,切實提高了智慧城市路口交通燈配時優化效果,緩解了交通路口的擁堵情況。
1 模糊控制方法
1.1 PID 控制器
PID 控制器的運行是根據輸入信號的比例、積分以及微分關系,實現對目標對象按需控制的目的。PID 控制器模塊可以使待控對象的被占用時長趨于合理,與單純積分控制的應用思想基本類似。在實現同等比例控制各個目標對象的同時,可以使下級設備保持自由運行狀態,對傳輸信號的控制作用相對較輕,當信號樣本單次輸入量較大時,PID 控制器的運行速度會明顯下降。為了保證待控對象的運行能力,在選擇信號樣本時應控制目標信號的單次輸出總量,PID 控制器結構模型如圖1所示。
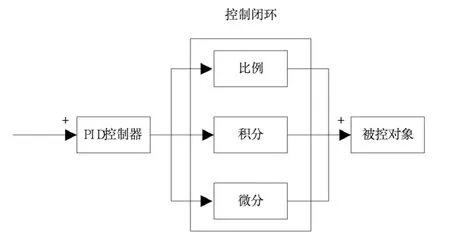
圖1 PID 控制器連接結構
設α表示模糊性參數,c表示信號分配特征(輛),該特征通過信息增益提取,表示待分配信號在單位時間內的累積均值(輛/min),δ表示傳輸信號的實時系數(min),聯系上述物理量,可將PID 控制器的運行表達式定義為:
式(1)中:W表示PID 控制器輸出。如果α>0 成立,表示信號傳輸方向與正負極標記方向相同;如果α<0 成立,則表示信號傳輸方向與正負極標記方向相反。
1.2 整定參數
由于PID 控制器的運行會同時受到兩種信號源的影響,在規范路口交通燈配時標準時,易出現信號傳輸行為混亂而造成控制效果不佳。為了避免上述情況的發生,可以根據PID 控制器元件的實時運行特點,求解整定參數并聯合相關物理參量,完善模糊控制方法的應用流程[3]。整定參數,是對參數指標的整合與判定,前者意在將所有可能的物理參數聚合在一起,通過集中計算的方式選定最優解結果;后者則是在所有可能最優解中進行持續搜索,在去除局部干擾項參數后,得到唯一全局的最優解結果。在對路口交通燈配時優化過程中,只有保證整定參數求解結果的唯一性,才能實現對信號燈響應時長的準確分配,其整定參數的計算應滿足如下表達:
式(2)中:Y表示整定參數的唯一解,β表示所選信號參量的控制系數,表示所選信號參量的模糊標記指征(輛),α、σ表示兩個不相等的信號導入參數,I表示實時整定向量(輛/min),γ表示方向性參數,q1、q2、…、qn表示n個不同的數值解(min/輛)。為了充分發揮模糊控制方法的應用能力,在對方向性參數進行取值時應盡量避免取得零值或與零接近的物理參數。
2 智慧城市路口交通燈配時策略優化
在模糊控制方法基礎上確定路口的實時交通狀態,選擇既定動作指令并聯合獎勵值函數,求解優化指數參量,實現對智慧城市路口交通燈配時策略的優化。
2.1 交通狀態
智慧城市管理理念中,當交通路口擁塞程度達到一定數值水平后,當前路口便不具備再容納其他車輛通行的能力。模糊控制理論認為,路口交通狀態會受到時間、季節、溫度等多項外界因素的影響,因此在制定交通燈配時策略時,可以適當調整信號燈的響應時長[4]。在優化交通燈配時策略時,交通狀態只能作為一項參考變量。設表示擁塞參數,lmax表示交通燈配時參數的最大取值結果(s),lmin表示交通燈配時參數的最小取值結果(s),kmax表示單位時間內的最大車輛容納數值(輛/min),kmin表示單位時間內的最小車輛容納數值(輛/min)。在上述物理量的支持下,聯合式(2),可將智慧城市路口的交通狀態求解表達式定義為式(3):
式(3)中:P表示智慧城市路口的交通狀態。如果交通狀態求解結果始終無法滿足路口交通燈的配時要求,可能是擁塞系數的選值結果出了偏差,應在不更改車輛容納數值與交通燈配時參數情況下對原擁塞系數進行調整。
2.2 交通燈顯示狀態選擇
交通燈顯示狀態選擇是指對交通燈的配時響應進行控制,即控制交通燈顯示的狀態,該狀態分為紅燈、綠燈和黃燈三種狀態,分別對應車輛的停止動作、行進動作和轉換動作(黃燈持續閃爍時,車輛在確認安全后可通行)。當車輛通行總和達到最大值時,交通燈的信號響應時長也達到最大值,在不考慮其他干擾情況下對交通燈顯示狀態進行選擇,即配時響應的控制應注意以下問題:
(1)停止動作:在交通情況相對復雜的前提下,同一方向上需要通行的車輛相對較多,若紅燈響應時間過長,容易導致嚴重的交通堵塞。為緩解城市路口的交通壓力,停止動作在總配時中的占比時長一般相對較短。
(2)行進動作:在大多數城市路口的主要通行方向上,綠燈的響應時間都要大于紅燈;而綠燈響應時間對應交通燈配時策略中的行進動作。為緩解城市路口的交通壓力,行進動作在總配時中的占比時間必須大于停止動作。
(3)轉換動作:連接停止動作與行進動作的交通燈表現形態被稱為轉換動作,也就是黃燈。在特殊路口處,黃燈如果持續閃爍,表示車輛在確認安全后可直接通過。因此,相較于停止動作與行進動作,轉換動作在交通燈總配時中的占比時長并不完全固定。
2.3 獎勵函數
獎勵函數是分別計算車輛在智慧城市路網中各個路口的行進效率,根據模糊控制策略求解獎勵函數表達式,對于效率的求解主要參考車輛通過路口所需的時間。在車流量保持均勻分布的情況下,只要控制車輛在各個路口的等待時長,就能避免車輛在城市路網中大量擁堵,從而實現對交通燈配時的優化處理。設表示車輛通行效率,表示實時車流量(輛/min),表示車輛在各個路口處的停留時間均值(s),ΔK表示車輛在單位時間內所通過的路口總量(輛),λ表示智慧城市路網中的路口分布系數。在上述物理量的支持下,聯合式(3)推導基于模糊控制的獎勵函數表達式(4)如下:
式(4)中:F表示獎勵函數計算結果,用于評估車輛在智慧城市路網中行進效率。為了使交通燈配時優化結果更加貼合實際需求,要求ΔK指標的取值不宜過小,所以在運算需求上應盡量延長車輛在智慧城市路網中的單位行駛時長。
2.4 優化指數
為了規范交通燈配時標準,要按照獎勵函數的計算結果,分別對紅、綠信號燈的響應時長進行控制調節。規定b'表示綠燈信號調節參數,μ表示紅燈信號調節參數,Μ表示交通燈轉換向量,聯合式(4),可將優化指數定義式表示為:
式(5)中:v表示優化指數,如果v計算結果等于“1”,表示在當前情況下的紅燈、綠燈響應時間能夠滿足城市路口的通行需求,交通燈的響應時長也達到了最佳配時狀態。
3 實例分析
基于模糊控制的路口交通燈配時優化方法,應以不確定交通需求下的配時優化模型作為實驗組和對照組,設計如下對比實驗分析。首先,模擬智慧城市路網晚高峰時期的路口交通情況,再分別按照實驗組、對照組方法對該路口的交通燈配時進行調節,最后記錄5 組不同的實驗結果并將所得數值與交通燈理想配時情況進行對比,其城市路口路網信息數據如表1 所示。
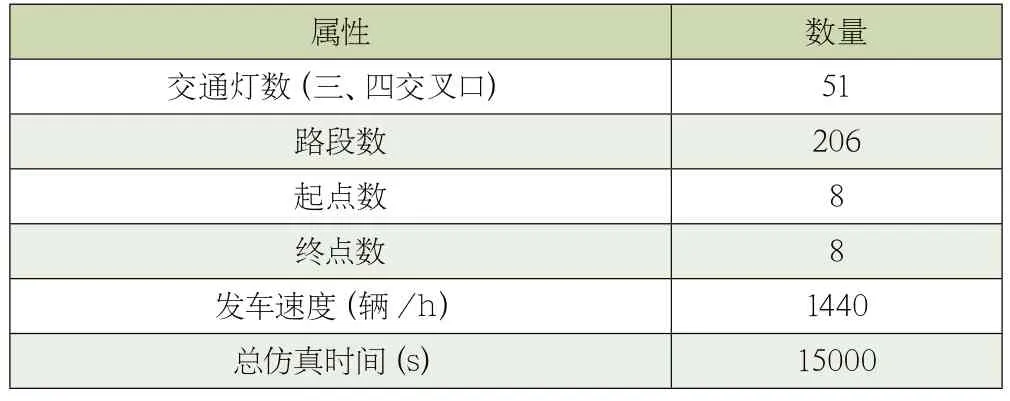
表1 路口路網信息數據表
表2 數據記錄了實驗組、對照組與理想情況下的交通燈配時情況。

表2 交通燈配時數據表
分析表1 可知,與理想數值相比,實驗組紅燈配時均值縮短了1s,綠燈配時均值延長了1s。由于數值較小,其對于交通燈配時策略的影響程度可以忽略不計;而對照組紅燈配時均值與理想數值相比延長了2s,綠燈配時均值縮短了5s,差值水平遠高于實驗組。綜上可知,基于模糊控制的優化方法更符合規范交通燈配時標準和緩解優化智慧城市交通壓力的實際需求,對當前城市路口的車輛密度推理得到表3 所示的車輛密度優化結果。

表3 車輛密度優化結果
表3 中的車輛密度由小到大排序為較小>小>適中>較大>大。根據表3 優化結果可知,應用本文方法后,當前城市路口車輛密度均得到了一定程度的降低。如果車輛密度為大時,無論是當前路口還是協同交叉口的車輛密度均降為較大,即車輛密度降低,避免了出現交通擁堵。
4 結語
通過實例結果分析,相比不確定交通需求下的配時優化模型,模糊控制交通燈配時優化方法聯合了獎勵值函數表達式,確定出優化指數的取值范圍,實現了對擁堵路口的交通燈配時優化。隨著這種新型優化方法的應用,城市路口的紅燈、綠燈配時均值都不會與理想配時標準產生過大出入,表明其在有效緩解智慧城市路口交通壓力上具有較高可行性和實用性。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
小天使·一年級語數英綜合(2014年6期)2014-07-22 23:32:38
智慧與創想(2013年7期)2013-11-18 08:06:04