大孔徑全可動射電望遠鏡換饋系統設計
2023-11-10 06:33:00楊鳳輝汪敏董亮施碩彪
工程設計學報 2023年5期
關鍵詞:系統
楊鳳輝, 汪敏, 董亮, 施碩彪
(中國科學院 云南天文臺, 云南 昆明 650216)
我國最南邊的40 m孔徑全可動射電望遠鏡位于云南省昆明市,其在可觀測天區和射電天文觀測方面具有獨特優勢。昆明40 m孔徑全可動射電望遠鏡(以下簡稱射電望遠鏡)的主要任務是接收月球探測衛星和火星探測衛星下行的科學數據,并對探測衛星進行精密測軌。從2007年至今,射電望遠鏡圓滿完成了“嫦娥一號”衛星、“嫦娥二號”衛星、“嫦娥三號”衛星、“嫦娥四號”中繼星、“嫦娥四號”衛星、“嫦娥五號”衛星探測數據的傳輸、精密測軌及其他深空探測任務。目前,研究人員還利用射電望遠鏡開展了脈沖星、分子譜線的觀測及甚長基線干涉測量等射電天文研究工作。
射電望遠鏡設計之初只有一個S/X雙頻饋源,觀測頻率為S頻段的2~4 GHz、X頻段的 8~12 GHz。為了進一步滿足探月工程、深空探測及其他天文觀測任務的需求,作者對S/X雙頻饋源進行多饋源改造,并開發了換饋系統。在不改變現有天線結構(包括主副反射面、天線背架支撐等)的基礎上,拆除原S/X雙頻饋源,安裝新的S/X雙頻饋源。新的S/X雙頻饋源在結構尺寸上有所變化,但其性能并未降低。原來的饋源支套上只有1個S/X饋源喇叭,現增加了C頻段、Ku頻段饋源,故改造之后饋源支套上有3個饋源喇叭,實現3個饋源4個頻段之間電動快速切換,使天線具有多頻段接收能力。本文給出了饋源及換饋系統的設計方案和實施方案,并在系統改造完成后對換饋系統的主要指標和天線的主要技術性能進行了測試。
1 換饋系統的組成及工作原理
射電望遠鏡如圖1所示。饋源位于拋物面天線的卡塞格倫焦點上,饋源艙內有接收機、變頻單元等設備,整個饋源艙重達4 t。饋源位置的準確性直接關系著天線的增益。為了保證饋源改造升級之后原有天線的性能不受影響,甚至有所提高,對換饋系統的設計和安裝調試提出了較高要求。

圖1 射電望遠鏡Fig.1 Radio telescope
1.1 換饋系統的組成
換饋系統的組成如圖2所示[1],其主要包括饋源單元、結構單元和控制單元。其中:饋源單元由S/X雙頻饋源、C頻段饋源和Ku頻段饋源組成;結構單元主要由支撐筒、俯仰筒和密封套等組成;控制單元主要由驅動控制單元、位置顯示單元和控制與保護邏輯測量單元等組成。
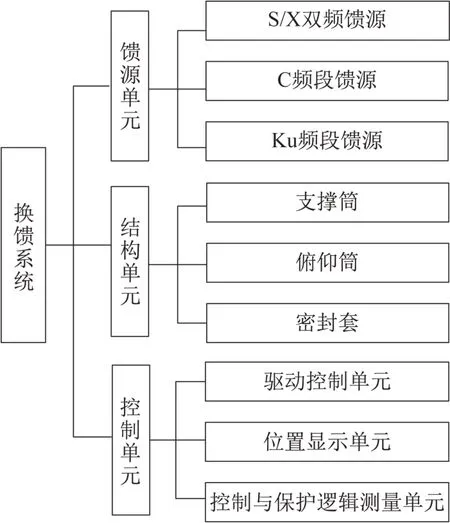
圖2 換饋系統組成Fig.2 Composition of feed switching system
1.2 換饋系統工作原理
在垂直于主反射面軸線的平面內,將3個饋源排布于饋源支套內,3個饋源的相心處在同一圓弧面上,此圓弧面過天線焦點且垂直于主反射面軸線。工作時,擺動所需頻段的饋源至弧面中心,對準副反射面,饋源之間的夾角和間隔在照射角范圍內互不遮擋,并且盡量減少3個饋源支套對天線主反射面的遮擋。頻段切換時,通過高精度電動推桿將工作饋源置于天線軸線相心處,將須工作的饋源移至弧面中心,并被可靠地鎖定,同時將位置信號傳遞至控制系統[2-3]。
饋源單元中,S/X雙頻饋源的體積和質量最大,因此饋源系統設計的關鍵是S/X雙頻饋源的位置。從受力平衡和減小遮擋的角度出發,將3個饋源排列在一個水平面內,S/X雙頻饋源在中間,C頻段、Ku頻段饋源的體量較小,排在S/X雙頻饋源的兩邊。
饋源切換方式采取一維鐘擺式,即通過驅動裝置驅動位于同一平面的3個饋源的俯仰筒,使需工作的饋源擺動至中心軸線并對準副反射面。一維鐘擺式饋源排布如圖3所示。
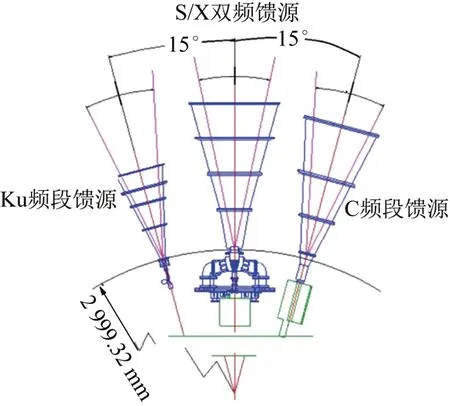
圖3 一維鐘擺式饋源排布示意Fig.3 Schematic of feed source layout with one dimensional clock pendulum
采取絲杠推拉的方式實現饋源系統的整體運動。為了保證每次擺動后所使用饋源的軸線能夠與天線的軸線重合,饋源的擺動中心應位于天線的軸線上。轉動中心的選取涉及力平衡、空間利用等諸多因素[4-5]。
3個饋源的偏開角度為15°。從C頻段、Ku頻段饋源的喇叭相心到S/X雙頻饋源喇叭邊緣的角度均為15°,而C頻段、Ku頻段饋源喇叭對副反射面的照射角為11.8°,可以確保喇叭間不會相互遮擋。
2 饋源設計
2.1 原天線參數
射電望遠鏡的天線為焦徑比為0.33的卡塞格倫雙反射面天線。其中:主反射面直徑在26 m以內的為實體面板;直徑為26~40 m的為網面,網孔尺寸為4 mm×4 mm。卡塞格倫雙反射面天線的幾何參數如圖4所示,其具體數值如表1所示。S頻段和C頻段工作在40 m孔徑的實網全面板,由于網孔尺寸超過了X、Ku頻段的波長,X、Ku頻段工作在26 m孔徑的內圈實面板,此時40 m孔徑天線的有效孔徑只相當于26 m孔徑的天線。
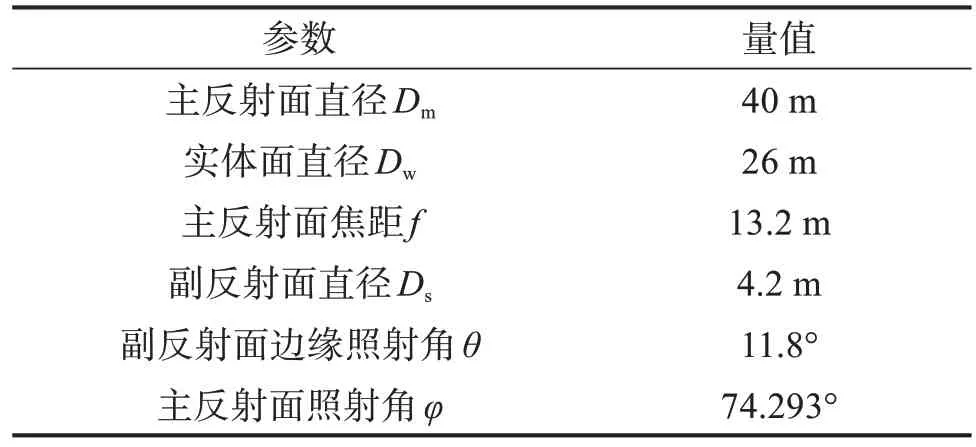
表1 卡塞格倫雙反射面天線幾何參數值Table 1 Geometric parameter values of Cassegrain antenna with dual reflectors
圖4 卡塞格倫雙反射面天線幾何參數示意Fig.4 Schematic of geometrical parameters of Cassegrain antenna with dual reflectors
望遠鏡主拋物面方程為:z=x2/4f。面型精度的均方根值δRMS:當主反射面直徑在26 m內時,δRMS≤0.8 mm;當主反射面直徑為26~40 m時,δRMS≤2.4 mm。
利用天線現有的幾何參數,可以設計不同頻段高效率照射的饋源喇叭。
2.2 饋源結構及仿真
2.2.1 S/X雙頻饋源結構
S/X雙頻饋源主要由S/X雙頻段波紋喇叭、S/X頻段耦合器、S頻段極化器和X頻段極化器等組成。S/X雙頻饋源結構如圖5所示,其中,S、X頻段共用一個輻射喇叭,通過S/X分波器將S、X頻段的信號分離,并利用組合網絡將耦合出的S頻段信號分成左、右旋圓極化,而X頻段的信號繼續向后傳輸給制冷接收機[6]。
S/X雙頻饋源輸出接口如圖6所示。其中S頻段接口采用標準FDP22(BJ22)法蘭,X頻段接口采用標準FBP84(BJ84)法蘭。

圖6 S/X雙頻饋源輸出接口Fig.6 Output interface of S/X dual-frequency feed source
2.2.2 C頻段饋源結構
C頻段饋源主要由波紋喇叭、圓極化器和正交器等組成。C頻段饋源的帶寬最寬,為4~8 GHz。其波紋喇叭采用直線張角喇叭,如圖7所示[7]。其輸出段呈直線。
圖7 C頻段饋源波紋喇叭示意Fig.7 Schematic of corrugated horn of C frequency feed source
2.2.3 Ku頻段饋源結構
Ku頻段饋源主要由波紋喇叭、圓極化器和正交器等組成。波紋喇叭采用直線張角喇叭,如圖8所示;圓極化器采用圓波導介質片移相形式;正交器選用圓波導形式。其極化方式為左右旋圓極化,接口為標準BJ140方形法蘭。
圖8 Ku頻段饋源波紋喇叭示意Fig.8 Schematic of corrugated horn of Ku frequency feed source
2.2.4 饋源仿真
依據上述設計的各個饋源喇叭,采用電磁仿真軟件對天線輻射特性進行仿真分析。S頻段、C頻段饋源進行實網組合40 m孔徑仿真,X頻段、Ku頻段饋源進行26 m孔徑實體面板仿真。天線輻射特性仿真模型如圖9所示,仿真結果如表2所示。
表2 天線輻射特性仿真結果Table 2 Simulation results of antenna radiation characteristics
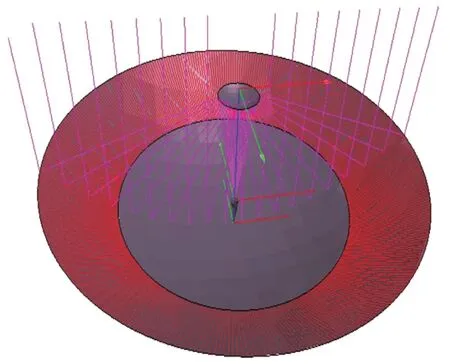
圖9 天線輻射特性仿真模型Fig.9 Simulation model of antenna radiation characteristics
3 換饋系統設計
3.1 換饋系統結構
根據換饋方案和工程難點,設計了換饋系統并進行了安裝調試。換饋系統結構如圖10所示,其主要由與中心體連接的支撐筒、與多頻饋源支套連接的俯仰筒、連接支撐筒和俯仰筒的電動推桿、俯仰筒和支撐筒之間的旋轉軸以及與旋轉軸一端連接的旋變組合等零部件組成。
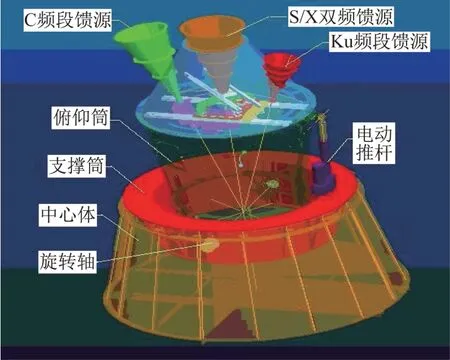
圖10 換饋系統結構Fig.10 Structure of feed switching system
電動推桿一端鉸接在支撐筒上,另一端鉸接在俯仰筒上,在電機的驅動下,推桿伸長或收縮,帶動俯仰筒繞換饋擺動中心旋轉。通過旋轉變壓器確定俯仰筒的旋轉角度并反饋給控制系統,實現位置閉環控制,保證饋源換饋到位時的位置精度。電動推桿由T形絲杠、電機、減速機、換向器、傳動軸、聯軸器、制動器和離合器等部件構成,具有換饋到位時自鎖穩定、運行過程平穩、使用壽命長等優點。
各頻段饋源工作時的饋源位置如圖11所示[8-10]。
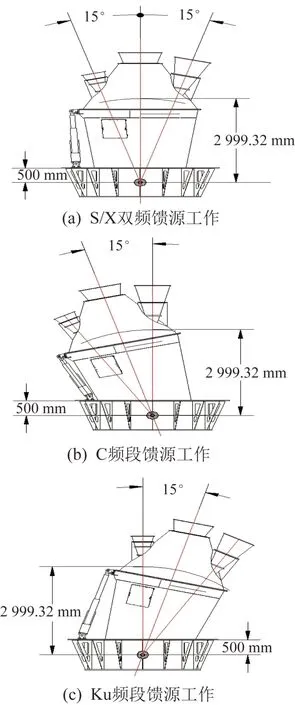
圖11 各頻段饋源工作時的饋源位置Fig.11 Feed source position during each frequency feed source working
3.2 換饋系統受力分析
原饋源系統總重量約為4.15 t,重心距中心體上端法蘭面1 260 mm;換饋改造后旋轉部分的重量為3.98 t,重心距中心體上端法蘭面1 766 mm,驅動裝置需提供5.8~9.1 t的力,同時換饋系統總重量的變化對天線配重的影響也需考慮。
建立換饋系統有限元模型。選取Shell63單元模擬中心體、支撐筒和俯仰筒,Link8單元模擬電動推桿,質量單元Mass21模擬饋源質心。仿真中只考慮結構重力載荷,約束中心體底面法蘭。中心體、支撐筒和俯仰筒均采用Q235鋼材[11-12]。相對于支撐筒和俯仰筒,3個饋源喇叭的質量很小,在建立換饋系統有限元模型時可以忽略。所建立的換饋系統有限元模型如圖12所示。
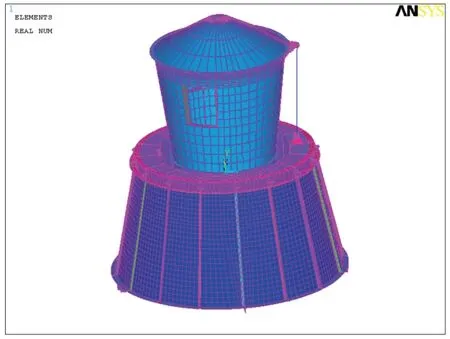
圖12 換饋系統有限元模型Fig.12 Finite element model of feed switching system
換饋機構的旋轉范圍為-15°~15°,對應著3種饋源的工作狀態。每種饋源工作時,又分別對應天線從朝天到指平的不同姿態。校核整個換饋系統的結構強度和剛度。天線處于朝天姿態時饋源的受力分析結果如圖13所示[13-14]。天線處于朝天和指平不同姿態時換饋系統的受力分析結果如表3所示。
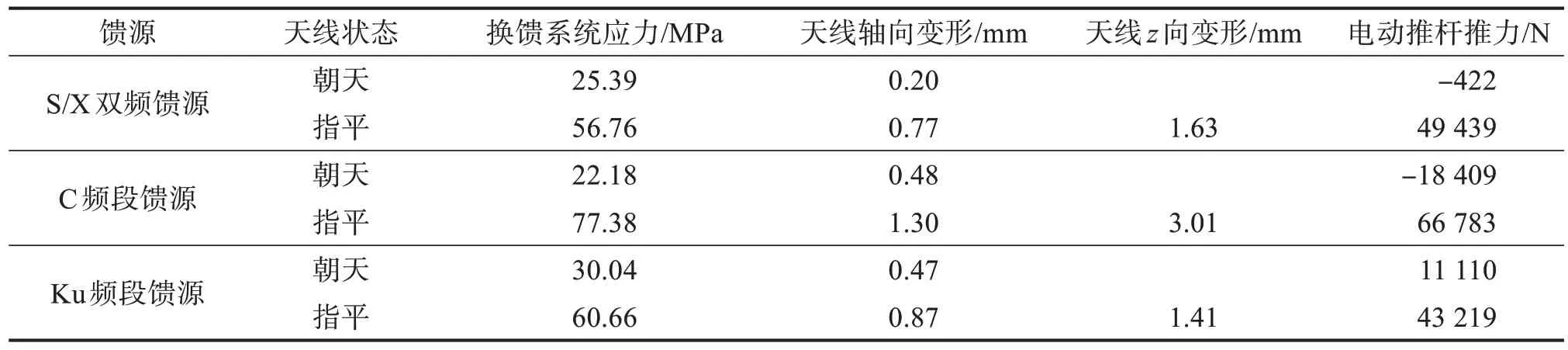
表3 天線處于處不同姿態時換饋系統的受力分析結果Table 3 Force analysis results of feed switching system with antenna at different attitudes
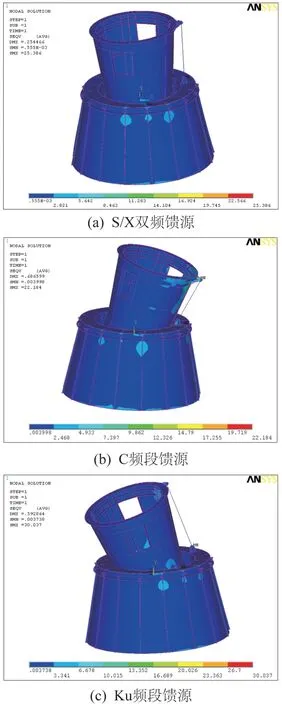
圖13 天線處于朝天姿態時饋源的受力分析結果Fig.13 Force analysis results of feed source with antenna at upturn position
天線處于朝天姿態時,換饋機構的應力最大值為30.04 MPa,出現在中心體上法蘭板與筋板連接處。同時,天線軸向變形最大值為0.48 mm,為天線朝天時C頻段饋源換饋到位時的變形。
天線處于指平姿態時,須考慮其在換饋平面內垂直于軸線方向的重力變形,即考慮系統工作時天線z向的變形。此時換饋機構的應力最大值為77.38 MPa,出現在C頻段饋源工作時推桿尾座連接處。同時,天線軸向變形最大值為1.30 mm,z向變形最大值為3.01 mm,均為C頻段饋源工作時天線指平時的變形值。
進行換饋機構屈曲穩定性分析時須約束中心體底面法蘭,對俯仰筒上端法蘭加載2 000 kg的載荷,得到換饋機構在該種載荷工況下換饋機構的一階屈曲穩定性安全系數為11.868。
綜上可知,在換饋過程中,換饋機構的最大應力(77.38 MPa)小于Q235鋼材的容許應力(157 MPa),天線軸向變形最大值(1.30 mm)小于5 mm,在加載2 000 kg的工況下換饋機構的一階屈曲穩定性系數為11.868,滿足了結構強度、剛度和穩定性要求。
3.3 控制系統設計
3.3.1 控制單元工作原理
控制系統的主要任務是準確、穩定、可靠地控制多頻饋源的位置,使工作頻段的饋源能夠準確地與天線保持同軸,不發生漂移。
控制單元采用典型的三環控制系統,其輸入是給定的位置控制命令。實際的控制信號是由給定的位置命令與饋源實際位置之間的角度誤差的大小和極性決定的。控制信號控制電機,使換饋機構向誤差減小的方向轉動,從而實現各頻段饋源精確定位在目標位置。控制單元中,電流環和速度環控制在中央控制器中實現,位置環控制在控制軟件中實現。換饋單元的工作原理如圖14所示[15-17]。
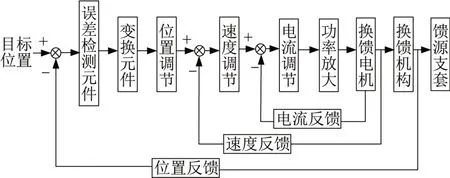
圖14 換饋單元工作原理示意Fig.14 Schematic of working principle of feed switching unit
3.3.2 控制單元主要部件
控制單元主要由中央控制器、遠程控制計算機及控制軟件、直流伺服電機(含測速機和制動器機組)、電機驅動控制器、可編程邏輯控制器、編碼模塊、模擬量采集模塊、位置傳感器和安全保護器件等組成[18]。
中央控制器是實施饋源軸運動位置的閉環控制及接口數據通信的核心部件。采用基于中央控制器工業總線的嵌入式計算機系統,并搭配各種擴展模塊,來保證控制系統的高精度及高可靠性控制,并使得系統易開發及易維護。
直流伺服電機選用稀土永磁寬調速直流伺服電機測速機組,它具有效率高、體積小、質量小、噪聲小及調速范圍大等優點。
電機驅動控制器是驅動天線的功率放大器。選用英國Park公司生產的590+直流馬達控制器,它具有功率放大倍數高、動態響應好、效率高、體積小、質量小、噪聲小及調速范圍大等優點。
控制與保護邏輯電路包括安全保護邏輯以及控制電路,其功能主要是饋源旋轉方向的限位保護、系統啟動與停機控制等。
3.3.3 遠程控制上位機
遠程控制上位機與控制單元的中央控制器通過網絡進行通信。控制單元可以實現換饋鏈路的數字位置閉環控制、數字角度編碼、控制參數的設置和保存、與外界監控機的雙向數據通信。上位機遠程控制界面如圖15所示,其具有待機、手動控制和位置閉環控制等3種控制方式。

圖15 上位機遠程控制界面Fig.15 Remote control interface of upper computer
待機:在該方式下,制動器抱閘,驅動單元處于禁用狀態;手動控制:在該方式下,用戶可以通過手動方式轉動饋源,改變換饋速度;位置閉環控制:在該方式下,位置指令通過遠程控制上位機的控制軟件直接輸入,執行后使饋源精確擺向指定的工作位置,到達指定位置后自動停止并鎖定。
4 換饋系統的安裝及調試
4.1 換饋時間
在換饋過程中,電動推桿的最大行程為760 mm,運行速度為2.5 mm/s,因此換饋時間t=760/2.5=5.067 min <10 min,可見能較為快速地進行換饋操作。
4.2 安裝精度
雖然換饋機構的結構強度和剛度滿足了要求,但在現場安裝中必然存在安裝誤差,因此在換饋機構設計中須采取以下2個措施來保證安裝精度[19],以進一步優化結構方案,減小變形。
1)饋源支套與俯仰筒的安裝定位如圖16所示。采取圓止口定位模式,由4個定位銷確保源支套與俯仰筒的正交性,以保證到位及復裝的精度。安裝止口的最大間隙為0.15 mm,定位銷的裝配間隙為0.06 mm,則折算至天線相心處的最大安裝誤差為0.21 mm。
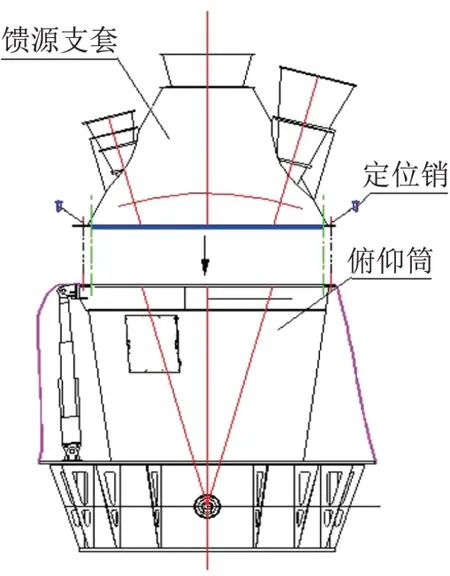
圖16 饋源支套與俯仰筒的安裝定位Fig.16 Installation and positioning of feed sleeve and pitching cylinder
2)將換饋機構的旋轉軸支座與俯仰筒和電動推桿進行一體化設計,支撐筒與中心體間同樣采取圓止口與上法蘭面相配的結構,避免現場安裝時找正和調整,保證了安裝基準的一致性、安裝的便利性及定位的準確性。
4.3 換饋精度
換饋系統的換饋精度由饋源支套尺寸精度、換饋機構裝配精度、電動推桿運動精度及鉸接精度、伺服控制精度及結構變形量等決定。
根據機械加工的精度等級,饋源支套尺寸精度可以達到0.5 mm;換饋機構裝配精度可達0.2 mm。
當電機轉動時電動推桿作伸縮直線運動,推桿前端與俯仰筒鉸接。推桿的運動精度即推桿每次能伸縮的最小距離,選用運動精度為0.1 mm的推桿。推桿鉸接精度由其制造精度和安裝工藝決定,推桿前端與俯仰筒的鉸接非常牢固,安裝工藝保證了沒有發生偏移的可能,而且根據受力分析可知,在最大受力狀態下鉸接應力小于其屈服極限,鉸接不會發生破壞。推桿兩端鉸接精度為0.04 mm,則推桿運動及鉸接總精度為0.14 mm。
電機采用調速范圍寬、線性度好的直流電動機,其轉速完全由換饋控制系統輸出的控制電壓控制,不需要齒輪減速機。伺服控制精度由編碼誤差、伺服驅動誤差和伺服控制誤差組成,伺服控制精度可達0.5 mm。
綜合多種因素可得換饋系統引起的不同頻段下的天線指向精度,如表4所示。

表4 換饋系統引起的不同頻段下的天線指向精度Table 4 Antenna pointing accuracy in different frequency bands caused by feed switching system
4.4 柔性防雨罩的設計
饋源整體擺動時,饋源支套與中心體之間要密封,且需防雨、防塵,因此設計了具有足夠硬度和適當延展性的柔性防雨罩。防雨罩材料為全滌綸,其兩面涂有聚氯乙烯防雨涂層,在-40~60 ℃的氣溫下有3 a以上的使用壽命,在昆明地區有5 a以上的壽命,且后續更換簡便,成本低廉。防雨罩上端與俯仰筒連接,下端與支撐筒固定,隨著換饋時饋源的擺動一側被柔性拉伸,另一側則發生折疊,從而保證了整個系統的密封防雨。饋源柔性防雨罩實物如圖17所示。

圖17 饋源柔性防雨罩實物Fig.17 Object of flexible rain cover for feed source
5 天線性能測試
利用所設計的換饋系統對饋源進行改造。饋源改造后,根據天線性能測試標準對天線的主要性能指標進行測試[20-21],結果如表5所示。由表可知,天線的主要性能指標均滿足了要求。

表5 饋源改造后天線的主要性能指標值Table 5 Main performance index values of antenna after feed modification
6 結 論
饋源和換饋系統改造之后,射電望遠鏡配置有S頻段(2~4 GHz)、C頻段(4~8 GHz)、X頻段(8~12 GHz)和Ku頻段(12~18 GHz),饋源通過換饋系統進行精準切換。改造后天線的工作頻率得到擴展,可以滿足更多的觀測需求,提高了望遠鏡的觀測效率和科研產出。
目前,換饋系統尚存在以下2點不足:一是換饋系統質量大,如果系統發生故障而需手動切換饋源時操作難度較大;二是不能隨著天線俯仰角的變化實時調節饋源位置,天線俯仰的范圍為5°~90°,由于天線自重變形,饋源對應的位置也須實時修正。下一步將針對以上不足進行改進,完善系統。主要的改進措施是,統計在使用過程中3個頻段饋源的位置與天線俯仰角的關系,得出修正系數,以在換饋系統控制單元中實時修正饋源位置命令。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32