基于新型全景光電的超近空防護系統設計
2023-11-17 07:18:16李麗亞劉京生管康萍張澤彬
激光與紅外 2023年10期
李麗亞,劉京生,管康萍,張澤彬
(1.中國電子科技集團有限公司第十一研究所,北京 100015;2.陸裝北京軍代局駐北京第二軍事代表室,北京100020;3.中國人民解放軍93128部隊,北京 100036)
1 引 言
“低慢小”目標是低空慢速小目標的簡稱,是指具有“低空超低空飛行、飛行速度較低、不易被偵察和探測發現”等特征的各種小型航空器和空漂物的統稱。通常是指飛行高度在相對高度200m以下,飛行速度(巡航速度)低于55 m/s(200 km/h),較小尺寸或紅外特征不明顯的各種空中飛行器。隨著“低慢小”無人機的技術發展,可通過空中偵察、自殺式襲擊、拋撒傳單等手段威脅治安區域,對“低慢小”無人機的探測、處置能力已經受到廣泛關注[1-6]。
近年來,國內外針對“低慢小”目標的探測和處置展開了深入研究。文獻[7]在系統層面上提出新型“低慢小”目標探測處置體系建設方案,針對新型目標和城市場景的特點,構建指揮控制、預警探測、多元化處置的防控體系。文獻[8] 對基于雷達、光電、無線電、聲波等多元化技術手段針對“低慢小”目標的探測與識別方法進行了分析,討論了現有的反無人機技術、典型的反無人機系統以及無人機集群對抗系統效能,為解決低空安全問題奠定了基礎。文獻[9]深入剖析了無人機集群對要地防空的威脅,傳統防空系統在近低空能力的有待加強,亟需加強相關反制能力建設等問題,提出了“環形部署,梯次防御,盡遠設防,靈活布防”的部署策略。文獻[10]綜合分析當前“低慢小”目標的主要特點,提出反“低慢小”目標光電技術的發展思路,包括光電探測技術、光電干擾技術、光電硬毀傷(激光毀傷)技術等。文獻[11]闡述了“低慢小”目標特性,為提升雷達探測識別能力,提出采用“寬帶多普勒處理”方式可有效提升改善因子,而基于窄帶時、頻域相結合的目標分類識別方法有望解決目標分類識別問題。但迄今為止,對“低慢小”目標在超近空空域仍存在難以探測發現、識別難度大、時效性低等難題。
傳統的防護體系已經初步實現了對近空空域的“低慢小”目標的探測處置能力,系統集成了針對“低慢小”目標特性的雷達、光電、無線電和指控設備,通過協同引導和信息融合技術完成對“低慢小”目標的探測、跟蹤、識別、決策和處置,保障防護區域的近空安全。然而,防護區域周界外圍超近空空域(距離150 m以內、高度50 m以下)環境更為復雜,建筑物、樹木遮擋情況嚴重,電磁環境復雜;而且探測到的“低慢小”目標距離防護區域周界比較近且飛行速度比較快,對防護系統的響應能力提出更高要求。因此,超近空空域是目前傳統防護體系的薄弱區域,亟需加強應對“低慢小”目標在超近空突然起降、快速穿越的探測處置能力。
2 傳統無人機防護系統
通常,無人機防護系統主要由指揮控制分系統、探測分系統以及干擾處置分系統組成。
指揮控制分系統可以實現探測分系統、干擾處置分系統各型設備的接入,完成各分系統設備數據信息的融合處理,形成綜合航跡、完成空情態勢三維立體顯示、針對目標生成處置方案、完成任務分配、協同聯動和效果評估;可實時監視分系統各設備工作狀態,對異常情況給予告警。
探測分系統主要包括雷達探測、光電探測和無線電偵測三種技術手段,其在探測“低慢小”目標時各有優勢,組合使用時能夠揚長避短構建一套完整的偵測體系,但在探測超近空的“低慢小”目標時仍然存在不足,具體技術手段特點如下:
2.1 雷達探測
探測距離遠,搜索效率高,測距精度高,受霧、云、風和雨等天氣條件影響較小,具有全天候、全天時的特點。但超近低空的“低慢小”目標飛行高度低,背景復雜,目標回波信號容易被強地物雜波和強噪聲所淹沒,導致目標的信雜比或信噪比低;同時,“低慢小”目標在超近空通常采取低速運動或者懸停的運動方式,導致基于“多普勒效應”的雷達很難探測到目標,影響雷達的探測效果。
2.2 光電探測
一般包括可見光探測和紅外探測,通過對目標無人機的圖像信息進行檢測,直觀、易于辨識目標,其為被動探測,具有較好的隱蔽性,同時在強電磁干擾等環境下仍能有效探測。無人機防護設備通常采取制高點架設的部署方式,但受防護區域地形以及設備部署位置的影響,防護區域超近低空一般環境復雜,建筑物林立、樹木密集,無法第一時間搜索跟蹤到目標,探測目標存在延遲。
2.3 無線電偵測
利用無人機與遙控器之間通信時的無線電信號進行偵測、識別和定位,可識別出一些無人機的型號,其優勢在于不受無人機尺寸、材質等限制。但由于是被動接收無人機發射信號,對于自主飛行模式下或處于無線電“靜默”狀態下的無人機無法探測;此外,防護區域地勢起伏,建筑物遮擋多,移動基站密度大,對無線電信號造成嚴重的衰減和干擾。
干擾處置分系統一般采用無線電干擾技術手段,通過對無人機的遙控信號工作頻段上發射大功率的干擾信號,提升無人機上接收設備接收的噪聲電平,使遙控器和無人機不能正常通信,迫使入侵無人機迫降或自動返航。
目前,傳統的防護系統采用雷達、光電、無線電三者協同探測,將各自探測手段的特點進行互補,但由于傳統的探測處置設備架設高度較高,且周圍環境復雜,地勢起伏,樹木、建筑物遮擋嚴重,因此無法覆蓋設備部署下方以及防護區域周界外圍的超近低空空域,探測處置區域存在“燈下黑”的盲區,傳統手段探測處置盲區示意如圖1所示。
本文提出一種基于新型全景光電探測技術的超近空補強設計方案,采用低照度、大視場可見光傳感器,利用多傳感器拼接技術,實現單節點大空域范圍的覆蓋與顯示,利用類人視覺機制的智能算法,實現復雜場景內目標的快速檢測與準確識別。通過多節點分布式組網部署方式,實現對現有防護系統超近空防護能力的補強。
3 新型超近空防護系統設計
3.1 系統總體設計
新型超近空防護系統主要由指揮控制分系統、全景光電探測分系統以及智能無線電干擾分系統組成,如圖2所示。指揮控制分系統通過開放架構將分布式系統進行綜合集成,完成點位間信息互聯、態勢融合和協同調度,是分布式系統實現高效工作能力的核心。全景探測分系統采用全景光電探測設備對防護空域進行全天候、全天時探測、預警,當發現可疑目標后,通過小目標檢測算法及深度學習算法處理后確認目標信息,上報至指揮控制分系統進行目標評估、顯示。智能無線電干擾分系統采用全向干擾設備,對“低慢小”目標進行鏈路干擾,消除突防威脅。
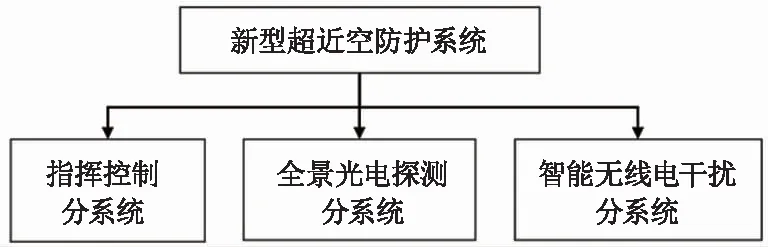
圖2 新型超近空防護系統組成圖
新型超近空防護系統具備多探測節點協同工作和對超近空、超低空的全天時探測能力,可有效解決防護區域超近空、超低空建筑物密布、樹木林立、基站密度高等不利因素導致的遮擋嚴重、探測盲區過大等問題,有效地彌補現有常規防護系統的探測盲區。
3.2 指揮控制分系統
指揮控制分系統主要對光電、無線電等防控設備進行管理、控制,在偵察探測信息融合、目標識別等基礎上,控制無線電干擾分系統處置“低慢小”目標。
指揮控制分系統主要以功能軟件為核心,部署和運行于通用計算機平臺。指揮控制分系統組成如圖3所示,分系統軟件包括三維態勢顯示、數據融合、目標識別、輔助決策、指揮控制、視頻服務等模塊,用于完成探測識別處置“低慢小”目標所需的各項功能。分系統硬件平臺包括通用計算機、服務器、磁盤陣列、交換機等,用于滿足計算處理、數據通信等需求。
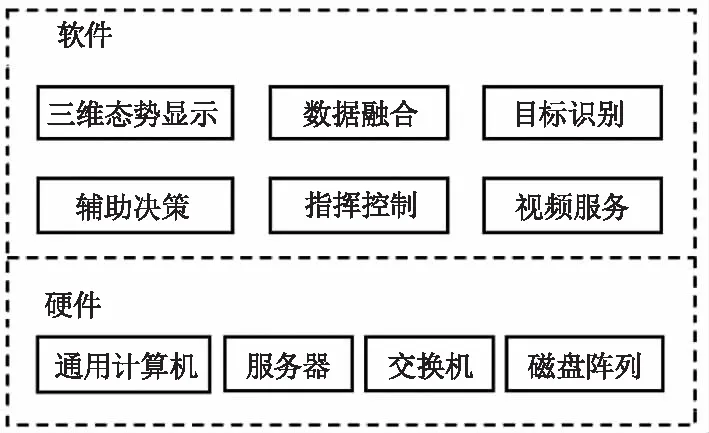
圖3 指揮控制分系統組成圖
全景光電探測分系統將探測、識別到的“低慢小”目標信息上報到指揮控制分系統,在指揮控制分系統的三維地圖上顯示告警位置信息、機型信息等,可實時查看告警點位視頻圖像;通過智能輔助決策算法評估后控制智能無線電干擾分系統,控制開啟告警點位附近的無人機干擾設備,完成各系統間信息交互、指揮控制。
3.3 全景光電探測分系統
全景光電探測分系統主要由NVR業務服務器、顯控平臺和多臺全景光電探測設備組成,其組成如圖4所示。
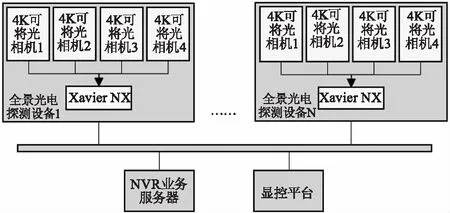
圖4 全景光電探測分系統組成圖
全景光電探測分系統的技術特點如下:
(1)單節點全景光電探測設備采用單傳感器4 K高清、復數組網、凝視型25 Hz高幀頻的應用的技術方式。為實現大數據量的同步處理及傳輸,采用高性能GPU前端預處理和后端分析的信號處理架構,構建前端節點自探測處理,后端中心二次篩選提取的高效系統數據處理層級架構,實現多節點探測信息的批量處理及統一上報;
(2)NVR業務服務器與板卡和顯控平臺通信,實現信令的轉發,報警事件等日志的存儲;
(3)NVR業務服務器實現所有實時視頻的接入、轉發、錄像及點播;
(4)顯控平臺可實時顯示各點位光電全景探測設備的圖像信息和告警信息,同時具備報警事件的管理和回放功能,以及對各全景光電探測設備的遠程管理等功能。
全景光電探測分系統工作流程如圖5所示,首先獲取前端相機的數據碼流,調用板卡底層解碼庫,實現視頻幀的獲取,然后對單路視頻圖像進行去暗角、畸變矯正等圖像處理,利用拼接融合算法完成多路圖像拼接處理;在拼接后的全景圖像上進行小目標檢測,然后利用深度學習算法對疑似目標進行虛警二次過濾,當確認為真目標,上傳告警信息至NVR業務服務器,完成目標告警相關視頻的存儲、截圖,并將告警信息上報至指揮控制分系統,在顯控平臺實時顯示圖像以及告警信息。

圖5 全景光電探測分系統工作流程圖
全景光電探測設備采用4顆4 K可見光相機組合的方式,高靈敏、低照度可見光凝視探測技術路線,通過大像元、大視場、低照度可見光傳感器以及全景圖像拼接應用的方案設計,實現水平方向180°大視場監視,對弱小動目標的高幀頻探測以及防控區域的大空域覆蓋。通過顯控平臺實時顯示全景光電探測設備拼接后的全景圖像及目標告警信息,并實現全景設備的狀態管理、設備列表管理、報警管理、報警配置、報警快照、報警回放以及部分業務功能等,傳統光電搜索跟蹤設備與新型全景光電探測設備顯控對比如圖6所示。在超近低空空域相較于傳統的光電搜索跟蹤設備,新型全景光電探測設備具有以下優勢:(1)大視場監視;(2)不需要機械轉動搜索,處理速度快、效率高;(3)成本低廉、體積輕巧,在復雜環境下可通過分布式部署方式解決遮擋問題。

圖6 傳統光電搜索跟蹤設備顯控(上)與新型全景光電探測設備顯控(下)對比圖
針對復雜背景環境下的運動弱小目標的檢測,通過基于類人腦視覺機制運動目標檢測與智能識別技術,對運動“低慢小”目標以及復雜動態背景環境開展針對性的建模,提高在復雜背景下弱小運動目標的快速檢測能力,通過相鄰幀之間的運動關聯比對,實現虛假運動目標的剔除。采用深度學習算法,實現對空中無人機、鳥、樹葉以及其他類似目標的深度分類識別。最終達到了針對“低慢小”目標的快速發現與準確識別的效果,類人腦視覺機制運動目標檢測與傳統目標檢測相比具有以下優勢:(1)類人腦視覺機制對運動目標感知能力突出;(2)類人腦視覺機制針可實現弱小目標在動態復雜背景環境下的精準識別。
3.4 智能無線電干擾分系統
智能無線電干擾分系統由多臺無人機干擾設備組成,按照防護需求與全景光電探測設備一起分布式部署在防護區域。
無人機干擾設備主要由干擾主機和天線構成,干擾主機內置干擾信號源和射頻功率放大器等。通過指揮控制分系統控制設備開啟工作,根據預置的信號波形對無人機進行寬頻干擾,可實現對900 M、1.5 G、2.4 G、5.8 G頻率的覆蓋,工作原理如圖7所示。在通視環境下,可實現約2 km的干擾距離,防御范圍水平為360°,垂直為60°。采用分布式部署方式,在防護區域形成一張無形的無線電防護網,實現對入侵目標的現場干擾處置。

圖7 無人機干擾設備工作原理圖
4 應用情況
根據某工程項目需求,在某區域復雜環境下(樹木、建筑物遮擋、電磁環境復雜等),對某防護區域內現有防護體系進行補強建設,主要解決防護區域周界超近空(距離150 m以內、高度50 m以下)的防護需求,重點解決“低慢小”目標在防護區域周界快速起降與突防的問題。通過對現場實際勘查,防護區域周界存在大量建筑物及樹木遮擋,整體環境比較復雜,現有的防護系統超近空防護能力還需要加強。
為解決上述問題,將分布式超近空防護系統部署于該防護區域,其系統構成如圖8所示。前端設備(新型全景光電探測設備、無人機干擾設備)通過網線與指揮控制中心的服務器、計算機相連,在后端計算機平臺上顯控平臺實時查看、記錄全景光電探測設備圖像數據,通過指揮控制系統控制無人機干擾設備工作。

圖8 新型超近空防護系統構成示意圖
設備沿防護區域東、南、西側圍墻分布式部署,根據現場情況,按需選取180°全景光電探測設備和無人機干擾設備的點位,設備均采用支架式架設在防護區域周界圍墻上,點位部署示意如圖9所示。

圖9 點位部署示意圖
目前已完成設備的安裝和系統調試,開展了以大疆精靈4、Parrot ANAFI、大疆FPV等無人機為靶機的測試試驗,測試采取了超近空突入以及近景起飛突入的飛行模式,系統在150 m處開始告警以及近景進入視場立即告警,并在防護區域周界圍墻外對小型人機完成干擾處置,小型無人機受到無線電干擾后迫降或自動返航,通過多節點分布式組網探測、干擾技術的應用,基本實現了該防護區域周圍外圍的全域覆蓋,彌補了建設前針對超近低空復雜背景環境下的探測處置盲區,有效提升了系統在超近空域的探測和處置能力,加強了防護區域的安全。
5 結 論
隨著無人機技術的不斷發展,在偷拍偷視、情報竊取,實施爆炸、恐怖襲擊等方面帶來巨大的威脅,給國民安全帶來了更嚴峻的挑戰。本文提出一種基于新型全景光電的超近空防護系統設計方案,重點解決傳統目標探測手段在超近空、超低空的探測不足,將各自探測手段的優劣勢進行互補,為解決超近空下“低慢小”目標的威脅提供了高效、靈活、低成本的解決方案,是對超近空反無人機系統領域的重要探索。填補了無人機探測針對超近低空空域的能力盲區,豐富和完善了無人機探測技術以及產品體系。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
中國科技博覽(2016年2期)2016-04-25 20:32:39
工業設計(2016年12期)2016-04-16 02:52:00
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
設備管理與維修(2015年12期)2015-04-09 06:57:00