基于C#的光伏電池機(jī)器人排版系統(tǒng)
2023-11-21 07:30:46劉良斌王瑤茜趙自鵬
汽車實(shí)用技術(shù) 2023年21期
劉良斌,王瑤茜,趙自鵬
基于C#的光伏電池機(jī)器人排版系統(tǒng)
劉良斌,王瑤茜*,趙自鵬
(湖南工業(yè)職業(yè)技術(shù)學(xué)院 電氣工程學(xué)院,湖南 長沙 410208)
針對光伏電池串排版中需要解決光伏電池串串焊后在傳送帶上存在位置偏差、擺放至基板后光伏電池位置需要微調(diào)、傳統(tǒng)桁架式排版機(jī)故障率高、調(diào)試難度大、占用生產(chǎn)時(shí)間等問題,提出機(jī)器人代替桁架式排版機(jī)的解決方案。方案通過RobotStudio仿真軟件,設(shè)計(jì)了一個(gè)仿真工作站。工作站中,定位相機(jī)對傳送帶上的光伏電池串定位,引導(dǎo)IRB1300機(jī)器人將電池串抓放至基板;糾偏相機(jī)對基板上的電池進(jìn)行定位,并通過IRB920機(jī)器人對電池進(jìn)行糾偏。為了驗(yàn)證機(jī)器人對存在位置偏差的電池抓放,采用IS2000-230定位光伏電池,實(shí)時(shí)更新仿真工作站中光伏電池的位置。同時(shí),開發(fā)了基于C#開發(fā)上位機(jī)系統(tǒng),實(shí)現(xiàn)對機(jī)器人系統(tǒng)的監(jiān)控和實(shí)時(shí)調(diào)整。該方案通過可靠性高的工業(yè)機(jī)器人實(shí)現(xiàn)電池串的排版和糾偏,能降低系統(tǒng)的整體故障率,提高可靠性。
光伏電池串;上位機(jī);機(jī)器人;排版系統(tǒng)
為了應(yīng)對全球變暖的問題,我國提出了在2030年前實(shí)現(xiàn)碳達(dá)峰、2060年前實(shí)現(xiàn)碳中和的策略。發(fā)展光伏電池產(chǎn)業(yè),是實(shí)現(xiàn)碳達(dá)峰和碳中和的破局之舉。目前,電池板的搬運(yùn)仍有很多是手工操作,特別是上下料的時(shí)候,工作強(qiáng)度很大。為了適應(yīng)產(chǎn)業(yè)的發(fā)展,亟須對產(chǎn)業(yè)進(jìn)行轉(zhuǎn)型升級(jí)。
工業(yè)機(jī)器人在碼垛工作站的應(yīng)用上有很多經(jīng)典案例,但對于如何通過工業(yè)機(jī)器人實(shí)現(xiàn)產(chǎn)品排版的文獻(xiàn)較少[1]。因自動(dòng)串焊機(jī)在焊接后,光伏電池串會(huì)出現(xiàn)位置的偏差,需通過自動(dòng)排版機(jī)對光伏電池串進(jìn)行排版和糾偏。一臺(tái)自動(dòng)排版機(jī)可以對應(yīng)兩臺(tái)自動(dòng)串焊機(jī)[2]。傳統(tǒng)光伏排版解決方案一般采用桁架式排版機(jī),該方案存在設(shè)備部件多、調(diào)試時(shí)間長、故障率高、占用生產(chǎn)時(shí)間等問題,工業(yè)機(jī)器人為標(biāo)準(zhǔn)產(chǎn)品,單機(jī)的可靠性高[3],采用工業(yè)機(jī)器人替代桁架式排版機(jī)優(yōu)勢明顯。在設(shè)計(jì)中,可以通過RobotStudio等仿真軟件對工作站進(jìn)行驗(yàn)證[4]。
本文通過RobotStudio仿真軟件搭建了一個(gè)光伏電池串的搬運(yùn)工作站,通過視覺引導(dǎo),實(shí)現(xiàn)機(jī)器人對電池串的定位[5],并通過工業(yè)機(jī)器人對物料的裝盤功能。開發(fā)上位機(jī)軟件,對機(jī)器人的裝盤情況進(jìn)行設(shè)計(jì)。
1 系統(tǒng)構(gòu)成
光伏電池在經(jīng)過焊接過程后,需要通過相機(jī)對電池串進(jìn)行定位,并通過機(jī)器人抓取至電池串?dāng)[放工位的基板上。擺放過程中存在電池位置的偏差,需要通過糾偏相機(jī)實(shí)現(xiàn)對焊接后的光伏電池板進(jìn)行修正。本工作站中,焊接后的電池串由兩條傳送帶輸送至機(jī)器人兩側(cè)。每條傳送帶有一臺(tái)電池串定位相機(jī)、一臺(tái)電池片糾偏相機(jī),實(shí)現(xiàn)光伏電池串、電池片的定位功能。相機(jī)將識(shí)別到的坐標(biāo)、角度信息,傳輸給可編程序控制器(Pro- grammable Logic Controller, PLC),經(jīng)計(jì)算后,PLC將抓取的坐標(biāo)發(fā)送給機(jī)器人。上位機(jī)可以實(shí)時(shí)對設(shè)備運(yùn)行情況進(jìn)行監(jiān)控,對于異常情況可以進(jìn)行實(shí)時(shí)處理。其中,PLC選用西門子公司的S7-1511- 1PN;相機(jī)采用康耐視公司的In-Sight 2000系列智能相機(jī)IS2000-230;電池串抓取機(jī)器人選用ABB公司的IRB1300;電池糾偏機(jī)器人選用ABB公司的IRB920。設(shè)備關(guān)系如圖1所示。
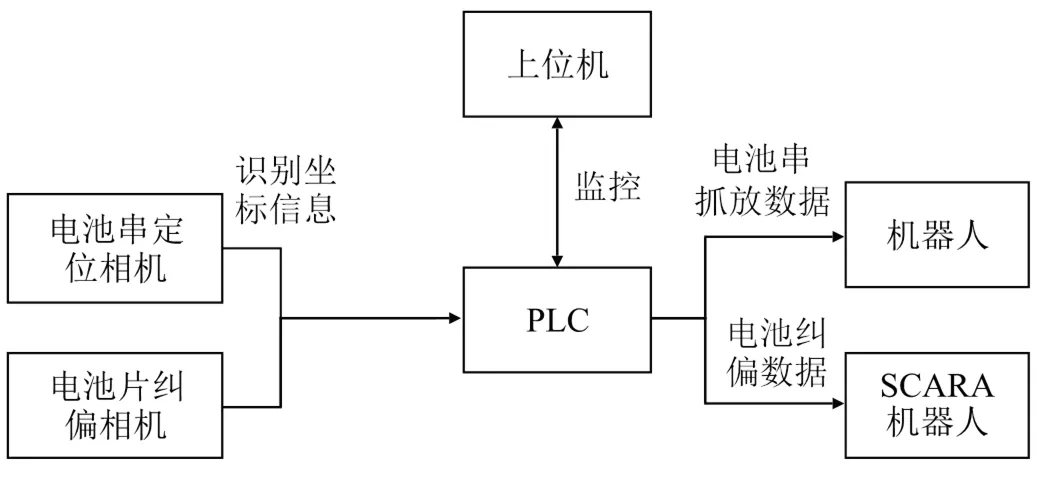
圖1 設(shè)備關(guān)系圖
2 機(jī)器人工作站的搭建
參照桁架式排版機(jī),以一臺(tái)機(jī)器人搭配兩臺(tái)光伏電池串焊機(jī)為標(biāo)準(zhǔn),搭建機(jī)器人光伏電池工作站。工作站包括光伏電池串搬運(yùn)工位和視覺定位工位,光伏電池排版工位配備1臺(tái)ABB公司的IRB1300機(jī)器人,每個(gè)傳送帶配備1臺(tái)康耐視公司的IS2000-230智能相機(jī)。相機(jī)對傳送帶上的電池串進(jìn)行定位,機(jī)器人通過多吸盤工具,將光伏電池串搬運(yùn)至轉(zhuǎn)運(yùn)板上。

圖2 機(jī)器人光伏電池串搬運(yùn)工作站
電池串糾偏工位分為定位和調(diào)整兩個(gè)功能。定位功能由兩臺(tái)康耐視公司的IS2000-230智能相機(jī)對轉(zhuǎn)運(yùn)板上的電池片進(jìn)行定位,確定光伏電池串的坐標(biāo)和角度信息。并通過兩臺(tái)SCARA機(jī)器人進(jìn)行角度糾偏,其中兩臺(tái)機(jī)器人為ABB公司的IRB920機(jī)器人構(gòu)成。工作站示意圖如圖2所示。
3 光伏電池串定位
3.1 視覺系統(tǒng)設(shè)計(jì)
光伏電池串在焊接后,會(huì)有位置和角度的偏差,如果不對電池串進(jìn)行定位,機(jī)器人的吸盤可能會(huì)抓空,故需要通過視覺系統(tǒng)對光伏電池串進(jìn)行定位。本文采用康耐視公司的智能相機(jī)實(shí)現(xiàn),型號(hào)為IS2000-230,該相機(jī)為灰度相機(jī),可以識(shí)別物料的位置,并能通過格式化輸出,將光伏電池板的坐標(biāo)通過PLC發(fā)送至機(jī)器人仿真工作站。
一個(gè)光伏電池串由9片電池組成。可以使用康耐視公司in-sight瀏覽器的“圖案(0-10)”工具對太陽能電池板進(jìn)行定位,該工具可以對檢測到的電池分別定位,傳送帶的高度為固定值,即高度為0,旋轉(zhuǎn)角度均為圍繞電池串中心的軸旋轉(zhuǎn),如圖3所示。定位后的坐標(biāo)和角度通過profinet協(xié)議,將每個(gè)電池的坐標(biāo)和偏轉(zhuǎn)的角度傳輸給PLC。例如:第一片光伏電池在沒有發(fā)生位置偏移和旋轉(zhuǎn)時(shí)的標(biāo)定點(diǎn),其坐標(biāo)為295、坐標(biāo)為272、角度為0°。經(jīng)過相機(jī)定位后(取一位小數(shù)),實(shí)際坐標(biāo)為297.1、坐標(biāo)為272.2、角度為0.0,如圖4所示。故機(jī)器人相對標(biāo)定點(diǎn)的坐標(biāo)為Δ=2.1、Δ=0.2、Δ=0。
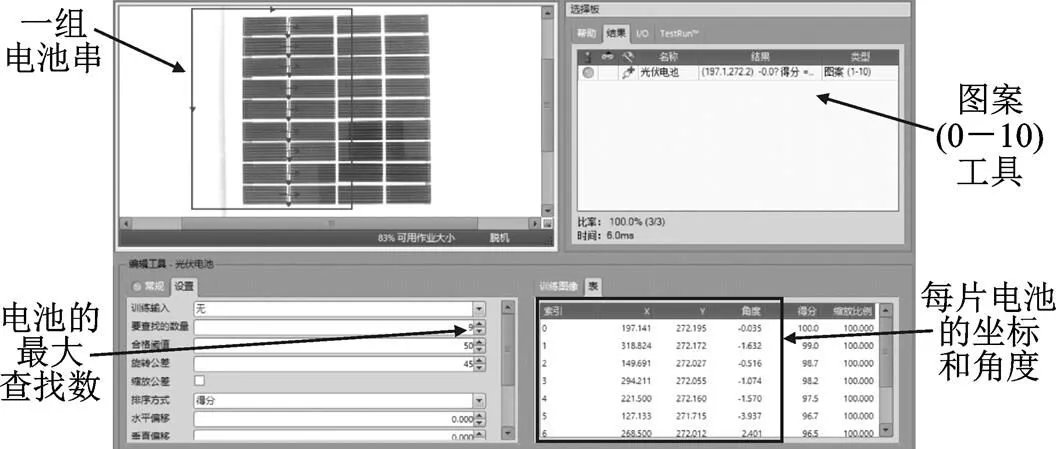
圖3 相機(jī)對電池的定位的結(jié)果
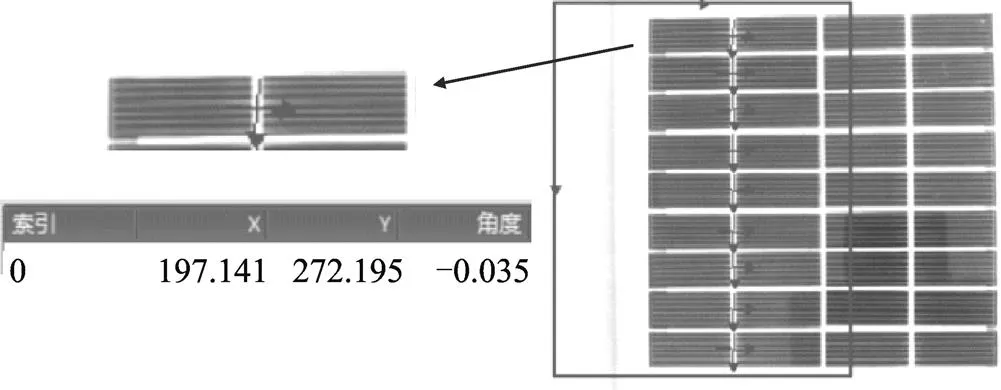
圖4 單片電池定位后得到的相對坐標(biāo)和角度
3.2 仿真工作站光伏電池串位置調(diào)整
本文通過真實(shí)康耐視相機(jī),對光伏電池串進(jìn)行定位,將定位后的坐標(biāo)傳送至機(jī)器人仿真工作站中,以實(shí)現(xiàn)真實(shí)模擬機(jī)器人正確抓取物料的過程。
仿真工作站中的電池串根據(jù)相機(jī)的坐標(biāo)和角度值,自動(dòng)調(diào)整位置。為了實(shí)現(xiàn)此功能,首先通過RobotStudio仿真軟件,建立一個(gè)smart組件,添加RapidVariable、Positioner兩個(gè)smart功能模塊獲取位置和角度信息。組件通過“gets”變量使能,當(dāng)該變量為1時(shí),組件自動(dòng)獲取機(jī)器人控制器得到的位置變量和角度變量。以上文中相機(jī)獲得的第一個(gè)光伏電池坐標(biāo)、角度為例,smart組件的設(shè)計(jì)如圖5所示。仿真工作站中的電池串位置調(diào)整前后如圖6所示。

圖5 定位smart組件
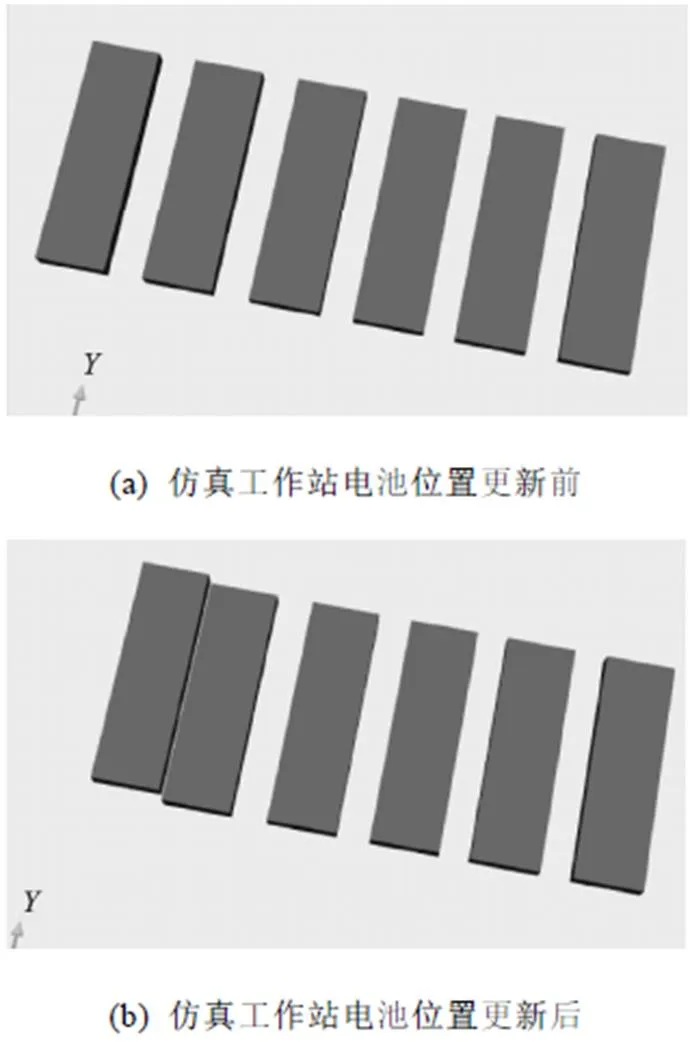
圖6 仿真工作站中電池根據(jù)相機(jī)數(shù)據(jù)更新
4 上位機(jī)開發(fā)
上位機(jī)通過C#軟件實(shí)現(xiàn)桌面應(yīng)用程序的開發(fā)。按照項(xiàng)目需要,需要開發(fā)實(shí)現(xiàn)對機(jī)器人軸關(guān)節(jié)數(shù)據(jù)的監(jiān)控、日志的監(jiān)控、物料擺放規(guī)劃等功能。需要開發(fā)的功能如圖7所示。

圖7 需要制作的功能模塊
4.1 啟動(dòng)與監(jiān)控功能模塊設(shè)計(jì)
啟動(dòng)與監(jiān)控功能模塊包含刷新獲取虛擬控制器、登出控制器、判斷機(jī)器人手/自動(dòng)模式、啟動(dòng)IO是否滿足、啟動(dòng)位置是否安全、啟動(dòng)或停止機(jī)器人、電機(jī)上電、程序指針復(fù)位、設(shè)置程序指針、設(shè)定機(jī)器人速度的功能,主要做機(jī)器人基本控制,如圖8所示。
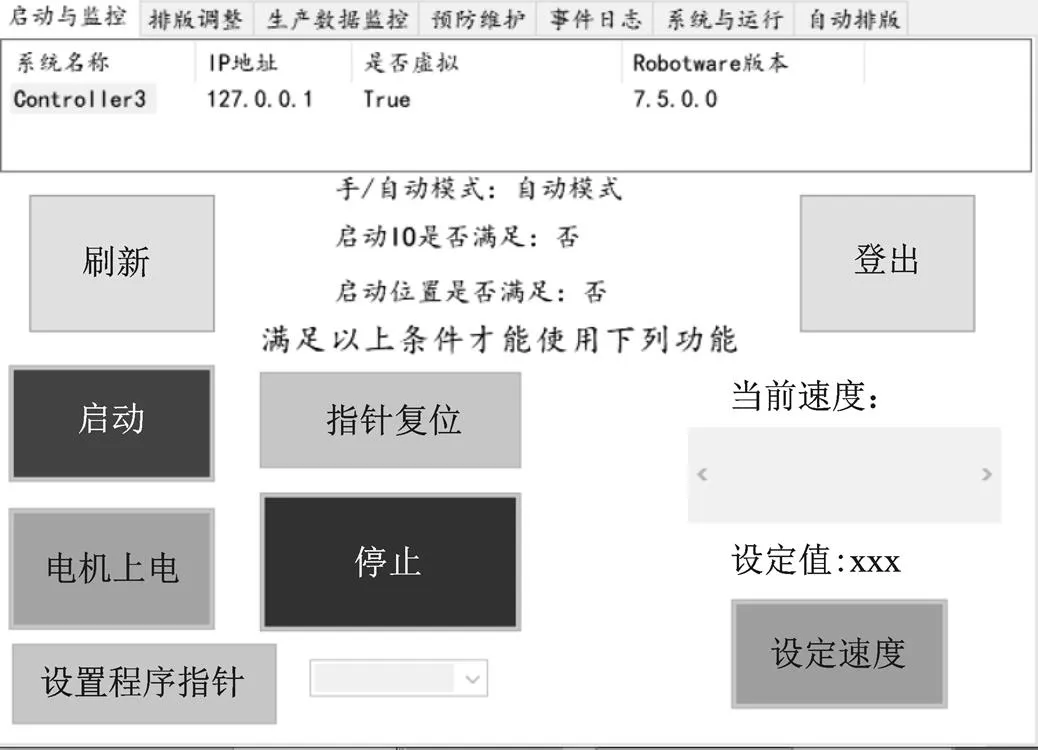
圖8 啟動(dòng)與監(jiān)控功能模塊
4.2 電池串位置微調(diào)模塊設(shè)計(jì)
功能模塊包含獲取更新目標(biāo)點(diǎn)的pPlaceBase3的大地坐標(biāo)、歐拉角坐標(biāo)、wPlace工件坐標(biāo)的數(shù)據(jù),修改目標(biāo)點(diǎn)pPlaceBase3的大地坐標(biāo)、歐拉角坐標(biāo)和wPlace工件坐標(biāo)的數(shù)據(jù),主要作用是方便對單串的位置進(jìn)行修改,以及對版塊的整體移動(dòng)更加便捷,如圖9所示。

圖9 電池串位置微調(diào)模塊
4.3 生產(chǎn)數(shù)據(jù)監(jiān)控模塊設(shè)計(jì)
本功能模塊包含獲取機(jī)器人運(yùn)行過程中的程序數(shù)據(jù)、通過程序數(shù)據(jù)對生產(chǎn)的過程進(jìn)行監(jiān)控、顯示當(dāng)前北京時(shí)間、實(shí)時(shí)查看時(shí)間對數(shù)據(jù)的影響、實(shí)時(shí)顯示機(jī)器人運(yùn)行速度、顯示生產(chǎn)目標(biāo)、顯示排版良率、實(shí)時(shí)更新產(chǎn)量統(tǒng)計(jì)等,如圖10所示。
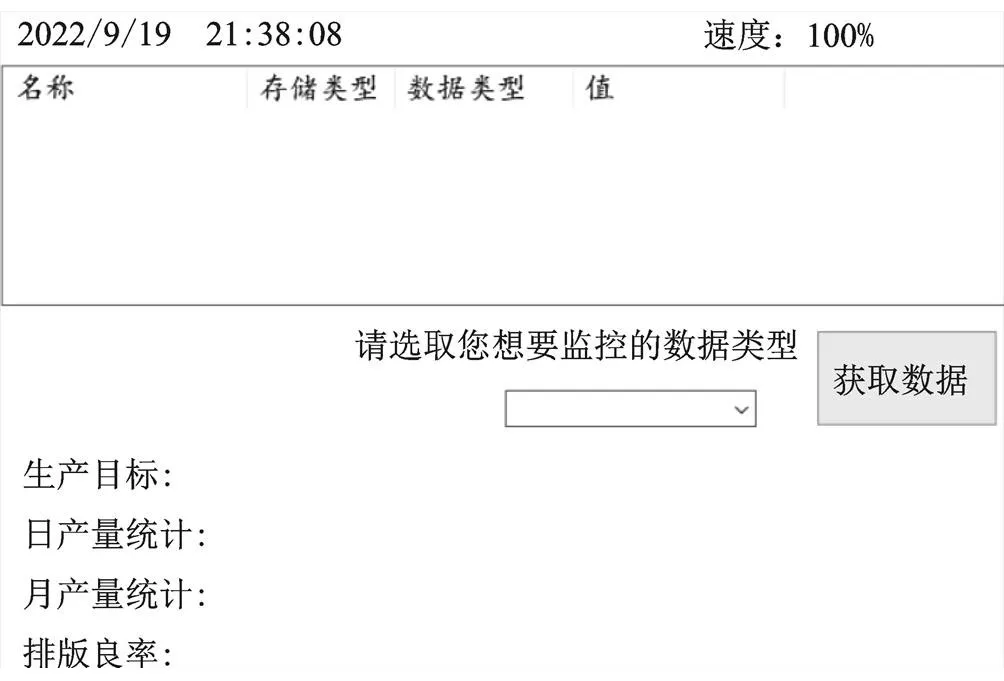
圖10 生產(chǎn)數(shù)據(jù)監(jiān)控功能模塊
4.4 檢查記錄模塊設(shè)計(jì)
本功能模塊包含日常點(diǎn)檢、定期點(diǎn)檢、創(chuàng)建檢查報(bào)告文檔、存儲(chǔ)“txt”日檢報(bào)告檢查記錄文檔到電腦任意位置、記錄開機(jī)時(shí)間、定檢間隔日期。主要作用是提醒管理員、操作人員進(jìn)行開機(jī)前檢查。達(dá)到預(yù)防維護(hù)提高生產(chǎn)效率的作用,如圖11所示。

圖11 預(yù)防維護(hù)功能模塊
4.5 機(jī)器人日志監(jiān)控模塊設(shè)計(jì)
本功能模塊包含獲取當(dāng)前工作站前15條事件日志功能,并實(shí)時(shí)刷新,方便管理員在軟件上對機(jī)器人實(shí)時(shí)狀態(tài)進(jìn)行監(jiān)控,如圖12所示。

圖12 事件日志功能模塊
4.6 機(jī)器人信息監(jiān)控模塊設(shè)計(jì)
如圖13所示,本功能模塊包含:

圖13 機(jī)器人信息監(jiān)控模塊設(shè)計(jì)
1)獲取機(jī)器人選項(xiàng)功能,可以更加直觀地查看機(jī)器人具有哪些選項(xiàng)、缺少哪些選項(xiàng)、機(jī)器人運(yùn)行過程中使用的語言、還有機(jī)器人的具體型號(hào)、載重和工作范圍。
2)獲取機(jī)器人運(yùn)行時(shí)長信息功能,可以查看機(jī)器人的使用時(shí)間,上次服務(wù)后的生產(chǎn)時(shí)間,可以直觀地看到機(jī)器人的生產(chǎn)時(shí)間從而達(dá)到防止機(jī)器人過度使用。上次開機(jī)時(shí)間可以查看本次生產(chǎn)的時(shí)間,顯示主機(jī)中央處理器溫度,可以預(yù)防溫度過高,并及時(shí)采取降溫措施。
4.7 光伏電池串排版模塊設(shè)計(jì)
根據(jù)產(chǎn)線上生成的光伏串長寬尺寸,自動(dòng)匹配模板庫中電池串的擺放方式,自動(dòng)生成新的RAPID程序目標(biāo)點(diǎn)位,新的排版順序,實(shí)現(xiàn)自動(dòng)排版功能,如圖14所示。
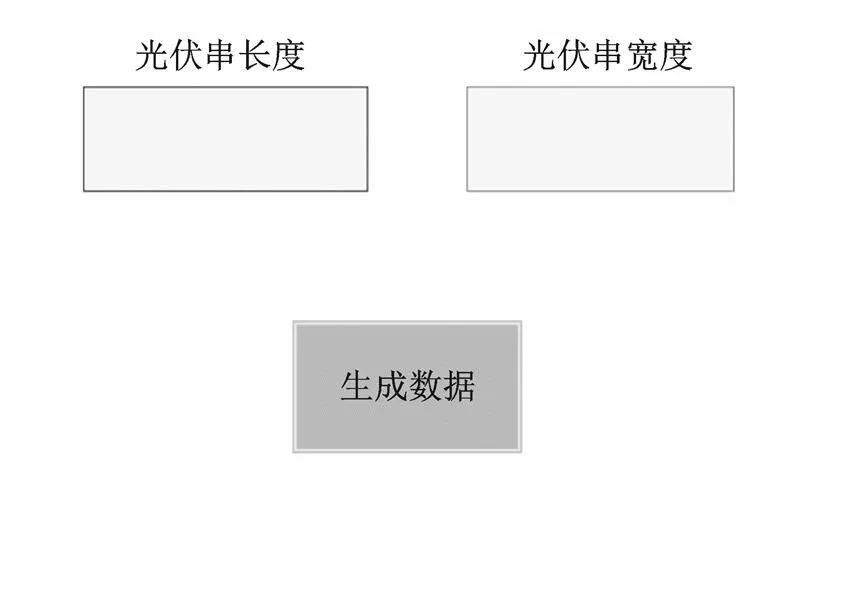
圖14 光伏電池串排版模塊
5 設(shè)備之間的通信
設(shè)備之間的通信方式,采用SOCKET通信實(shí)現(xiàn)。在通信配置中,PLC作為服務(wù)器,上位機(jī)、機(jī)器人、相機(jī)均作為客戶端。下面以PLC與機(jī)器人通信為例,說明通信方法。
5.1 PLC端程序的編寫
PLC需要通過TSEND_C和TRCV_C兩個(gè)功能模塊實(shí)現(xiàn)發(fā)送和接收數(shù)據(jù)。示例程序如圖15所示。
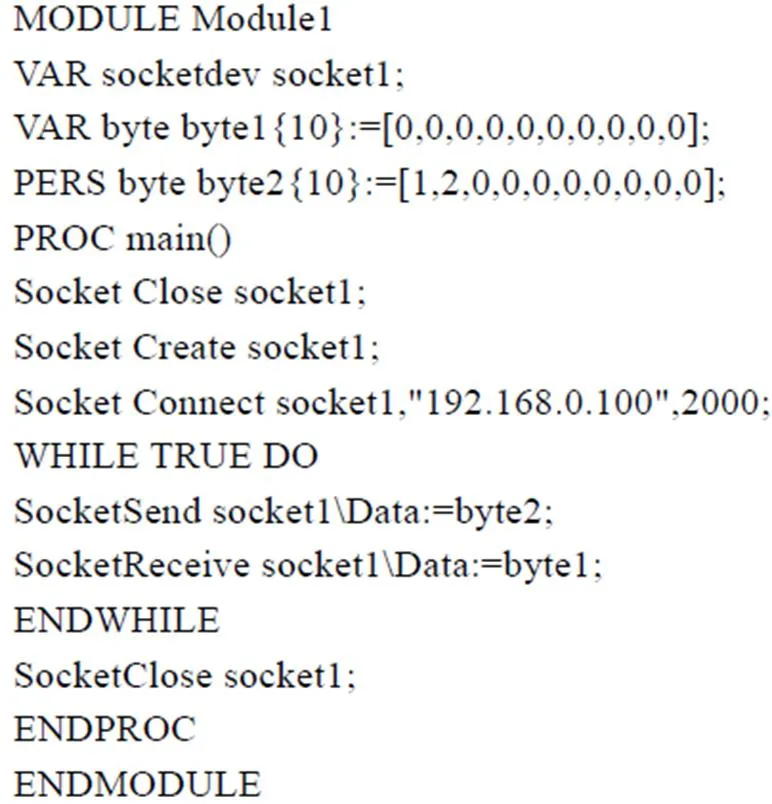
5.2 機(jī)器人端程序的編寫
機(jī)器人需要開通616-1 PC Interface(通信功能)[6]和623-1 Multitasking(多任務(wù))這兩個(gè)功能模塊才能實(shí)現(xiàn)通信。配置機(jī)器人的系統(tǒng)功能,設(shè)置機(jī)器人的IP。機(jī)器人端的程序示例如下:
6 總結(jié)
光伏電池焊接成電池串后,在傳送帶上,會(huì)與預(yù)期位置存在一定的位置偏差,為了保證機(jī)器人擺放位置的準(zhǔn)確性,使用康耐視公司的IS2000- 230智能相機(jī)對光伏電池串進(jìn)行定位。采用IRB 1300機(jī)器人對電池串進(jìn)行排版,IRB920機(jī)器人對電池串進(jìn)行糾偏。同時(shí),針對項(xiàng)目需求,開發(fā)了上位機(jī),并能通過上位機(jī)對光伏電池串搬運(yùn)情況進(jìn)行實(shí)時(shí)監(jiān)控。可以實(shí)現(xiàn)光伏電池串的自動(dòng)擺放與排版功能。將機(jī)器人代替自動(dòng)排版機(jī),能夠大大降低光伏電池串在生產(chǎn)過程中設(shè)備的故障率,提高設(shè)備的可靠性。
[1] 嵇朋朋,竇艷艷.基于ABB機(jī)器人工作站芯片產(chǎn)品排序?qū)崿F(xiàn)方法研究[J].焦作大學(xué)學(xué)報(bào),2019,33(2):80-83, 93.
[2] 鐘青山.臺(tái)達(dá)機(jī)電產(chǎn)品在太陽能電池串自動(dòng)排版機(jī)上的應(yīng)用[J].電器工業(yè),2016(1):74-76.
[3] 席云飛,吳雙,徐健,等.基于多垛型位置算法的碼垛系統(tǒng)設(shè)計(jì)[J].制造業(yè)自動(dòng)化,2020,42(3):63-67.
[4] 蔣慶磊,聶永濤,郇新.基于RobotStudio的工業(yè)機(jī)器人自動(dòng)化生產(chǎn)線仿真的研究[J].汽車實(shí)用技術(shù),2019, 44(18):177-179,198.
[5] 姜利.基于機(jī)器視覺的光伏電池片位置誤差檢測系統(tǒng)[J].機(jī)械制造與自動(dòng)化,2021,50(3):197-199.
[6] 蘇宇,劉海燕,李國勇.基于PC-Interface的機(jī)器人平面作業(yè)點(diǎn)快速定位系統(tǒng)研究[J].制造業(yè)自動(dòng)化,2023, 45(3):179-182.
A Photovoltaic Cell Robot Typesetting System Based on C#
LIU Liangbin, WANG Yaoxi*, ZHAO Zipeng
( Department of Electrical Engineering, Hunan Industry Polytechnic, Changsha 410208, China)
In order to solve the problems in the series typesetting of photovoltaic cells, such as the position deviation of photovoltaic cells on the conveyor belt after series welding, the position of photovoltaic cells after placing on the substrate needs to be fine-tuned, the high failure rate of traditional truss typesetting machine, the difficulty of debugging, and the occupation of production time. This paper proposes the solution of robot replacing truss typesetting machine. RobotStudio simulation software is used to design a simulation workstation. In the workstation, the positioning camera positioned the photovoltaic cell string on the conveyor belt, and guided the IRB1300 robot to grab the battery string and put it on the substrate; The correction camera locates the battery on the substrate, and the IRB920 robot corrects the battery. In order to verify the robot's grasp and release of batteries with position deviation, IS2000-230 is used to locate photovoltaic cells and update the position of photovoltaic cells in the simulation workstation in real time. At the same time, the upper computer system based on C# is developed to realize the monitoring and real-time adjustment of the robot system. The scheme realizes the typesetting and correcting of battery string by the industrial robot with high reliability, which can reduce the overall failure rate and improve the reliability of the system.
Photovoltaic cell string; Upper computer; Robot;Typesetting system
TP24
A
1671-7988(2023)21-120-06
10.16638/j.cnki.1671-7988.2023.021.025
劉良斌(1988-),男,碩士,講師,研究方向?yàn)槁窂揭?guī)劃、工業(yè)機(jī)器人,E-mail:liuliangbin@126.com。
王瑤茜(1983-),女,碩士,講師,研究方向?yàn)檐浖こ蹋珽-mail:14200100@qq.com
湖南省自然科學(xué)基金(2022JJ60035)。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學(xué)報(bào)(2016年1期)2017-01-20 08:21:20
中國廣播(2016年11期)2016-12-26 10:02:01
軟件導(dǎo)刊(2016年9期)2016-11-07 21:35:42
科技視界(2016年11期)2016-05-23 12:04:33
通信電源技術(shù)(2016年5期)2016-03-22 01:09:49
石油知識(shí)(2016年2期)2016-02-28 16:20:16
自動(dòng)化儀表(2015年11期)2015-04-01 01:02:40
