高性能永磁同步電機(jī)顯式模型預(yù)測控制算法研究
2023-11-22 08:55:18劉忠永何國林溫旭輝
電工技術(shù)學(xué)報(bào) 2023年22期
劉忠永 范 濤 何國林 溫旭輝
高性能永磁同步電機(jī)顯式模型預(yù)測控制算法研究
劉忠永1,2范 濤1,2何國林2溫旭輝1,2
(1. 中國科學(xué)院大學(xué) 北京 100049 2. 中國科學(xué)院電工研究所 北京 100190)
該文提出一種應(yīng)用于永磁同步電機(jī)的級聯(lián)式高性能顯式模型預(yù)測控制算法,基于多參數(shù)規(guī)劃思想建立系統(tǒng)參數(shù)化模型,離線求解有約束條件下的最優(yōu)解并以狀態(tài)量的分段仿射函數(shù)形式保存,解決了連續(xù)控制集模型預(yù)測控制算法在線求解的算力需求問題;全面介紹了顯式模型預(yù)測控制的應(yīng)用思想及設(shè)計(jì)流程,分析了在永磁同步電機(jī)控制中模型失配、死區(qū)效應(yīng)、數(shù)字延時(shí)等非理想因素帶來的影響并給出了應(yīng)對措施;與傳統(tǒng)PI控制算法進(jìn)行對比,通過仿真與實(shí)驗(yàn)驗(yàn)證了顯式模型預(yù)測控制算法的有效性及優(yōu)越性。
永磁同步電機(jī)(PMSM) 顯式模型預(yù)測控制 最優(yōu)化控制 轉(zhuǎn)速預(yù)測控制 電流預(yù)測控制
0 引言
在新世紀(jì)“雙碳”國家能源戰(zhàn)略大背景下,伴隨著“電動(dòng)化、智能化、網(wǎng)聯(lián)化”相互賦能,我國的電動(dòng)汽車產(chǎn)業(yè)發(fā)展已經(jīng)進(jìn)入了一個(gè)嶄新的階段。
在三電之一的電機(jī)控制領(lǐng)域中,過去數(shù)十年間應(yīng)用最為廣泛的PI控制策略屬于經(jīng)典的多環(huán)路控制策略(multiloop control)[1],基于誤差調(diào)節(jié)的控制思想使其具有較強(qiáng)的普適性,但是也仍然存在一些問題:PI控制的增益系數(shù)通常只在特定的工作區(qū)內(nèi)表現(xiàn)優(yōu)異,缺乏針對電機(jī)狀態(tài)變化的優(yōu)化考慮[2];電機(jī)d、q軸之間的耦合項(xiàng)被定義為擾動(dòng),前饋交叉解耦等策略將影響到系統(tǒng)的動(dòng)態(tài)性能[3];控制量的選擇沒有考慮到系統(tǒng)的約束條件,如定子電流大小以及電壓源逆變器的最大可輸出電壓,限制了電驅(qū)系統(tǒng)的性能及效率,且由于積分控制器的存在,抗飽和策略的引入可能會導(dǎo)致線性系統(tǒng)的不穩(wěn)定[4]。
20世紀(jì)70年代于過程工業(yè)提出的預(yù)測類控制算法標(biāo)志著業(yè)界控制思想開始由調(diào)節(jié)向?qū)?yōu)方向的轉(zhuǎn)變,從基于脈沖、階躍響應(yīng)模型的預(yù)測算法[5-6]到廣義預(yù)測控制(General Predictive Control, GPC)的提出[7-8],再到結(jié)合最優(yōu)化控制以及李雅普諾夫穩(wěn)定性思想的綜合性理論,經(jīng)過數(shù)十年的發(fā)展,模型預(yù)測控制(Model Predictive Control, MPC)算法已經(jīng)成為針對多輸入多輸出、具有復(fù)雜約束條件的非線性動(dòng)態(tài)系統(tǒng)的有效控制策略,其實(shí)現(xiàn)思想是在每一個(gè)控制周期內(nèi),基于系統(tǒng)預(yù)測模型及當(dāng)前的狀態(tài)量(測量值或估計(jì)值),求解代價(jià)函數(shù)(cost function)在預(yù)測時(shí)域內(nèi)最優(yōu)的控制序列,選取第一個(gè)控制量作用于控制對象,并不斷重復(fù)該過程。然而,受限于MPC對于尋優(yōu)問題的巨大算力需求,直到近些年來,隨著計(jì)算處理單元的迅速發(fā)展和各類新算法的提出,才開始廣泛應(yīng)用于電力電子和電機(jī)控制領(lǐng) 域[9]。
永磁同步電機(jī)(Permanent Magnet Synchronous Motor, PMSM)控制領(lǐng)域中,根據(jù)是否需要脈沖寬度調(diào)制(Pulse Width Modulation, PWM)技術(shù),MPC分為有限控制集(Finite Control Set, FCS)及連續(xù)控制集(Continuous Control Set, CCS)兩類[10]。FCS直接以逆變器開關(guān)組合為控制動(dòng)作,遍歷求解使得代價(jià)函數(shù)最優(yōu)的開關(guān)狀態(tài),并延伸出了一系列優(yōu)化算法,如多矢量控制[11-17]、多步控制[18-19]等;CCS控制策略依賴PWM技術(shù),基于系統(tǒng)模型及代價(jià)函數(shù)求解一個(gè)最優(yōu)化控制問題,最優(yōu)控制量以幅值及相位皆連續(xù)可調(diào)的電壓矢量表達(dá),保證了固定的開關(guān)頻率。最優(yōu)化控制問題一般為無約束或有約束的二次規(guī)劃形式,對于無約束問題,基于代數(shù)黎卡提方程求解的最優(yōu)控制量具有解析解形式,此類控制方法也被稱之為線性二次型調(diào)節(jié)器(Linear Quadratic Regulator, LQR)。對于有約束問題,由于約束條件的復(fù)雜性,其最優(yōu)解不存在解析解形式,可以通過一些數(shù)值求解方法求得近似最優(yōu)的數(shù)值解,如梯度投影法、內(nèi)點(diǎn)法、有效集法等,但是對于電機(jī)系統(tǒng)此類響應(yīng)時(shí)間要求較快的控制對象,很難在較短的控制周期內(nèi)完成對于目標(biāo)問題的迭代求解[20]。顯式模型預(yù)測控制(Explicit Model Predictive Control, EMPC)思想的提出[21],將有約束問題在線求解的數(shù)值解形式轉(zhuǎn)化為離線關(guān)于狀態(tài)量的分段仿射(Piecewise Affine, PWA)函數(shù)顯式表達(dá),有效地解決了MPC在線求解困難的問題。
本文提出一種基于EMPC思想的高性能永磁同步電機(jī)控制策略。采用多參數(shù)規(guī)劃思想分別建立電流控制及轉(zhuǎn)速控制的系統(tǒng)線性化模型,消除狀態(tài)之間的耦合及非線性環(huán)節(jié)影響,離線求解在有效約束條件下使得代價(jià)函數(shù)最優(yōu)的控制量并以分段仿射函數(shù)的形式保存,實(shí)際運(yùn)行中通過查詢當(dāng)前狀態(tài)量組合所在分區(qū),獲取對應(yīng)的最優(yōu)控制量。對MPC應(yīng)用中的模型失配、數(shù)字延時(shí)、死區(qū)效應(yīng)等問題進(jìn)行了全面分析并給出了相應(yīng)的解決方案,基于一套全自動(dòng)對拖測試平臺驗(yàn)證了算法的有效性。
1 顯式模型預(yù)測控制
MPC的三大組成要素分別為:預(yù)測模型、代價(jià)函數(shù)、滾動(dòng)優(yōu)化,定義線性時(shí)不變系統(tǒng)預(yù)測模型為

式中,、、為系統(tǒng)常系數(shù)矩陣;、分別為系統(tǒng)的狀態(tài)及控制向量;為時(shí)間。
、的維度及約束條件定義為

假設(shè)系統(tǒng)在時(shí)刻所有狀態(tài)量皆可測量或可估計(jì)得到,定義預(yù)測時(shí)域(→+)內(nèi)的有約束有限時(shí)間尺度最優(yōu)化控制(Constrained Finite Time Optimal Control, CFTOC)問題(在MPC中稱之為代價(jià)函數(shù))為
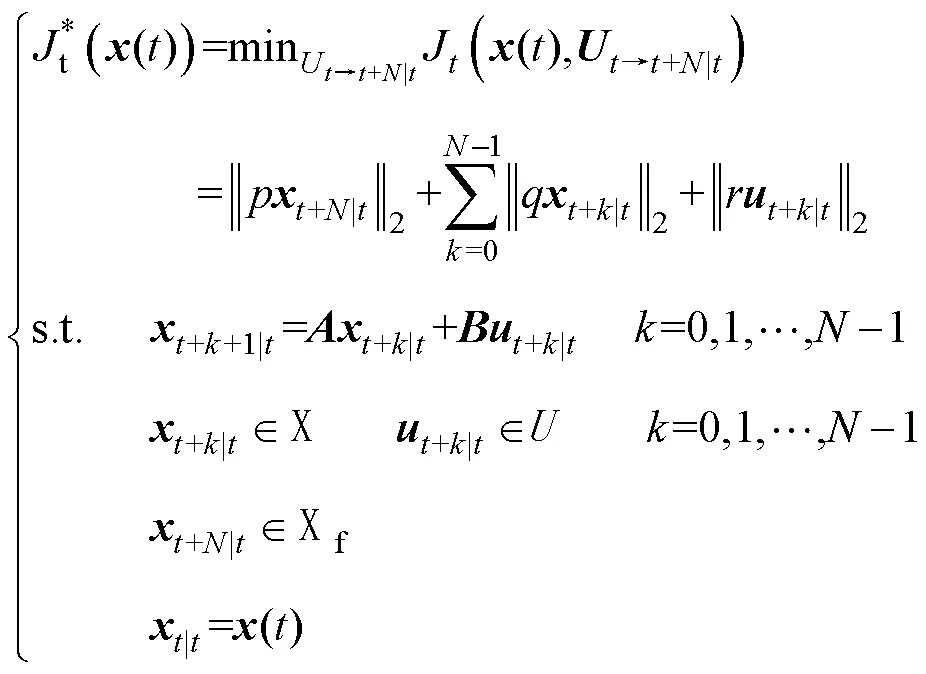


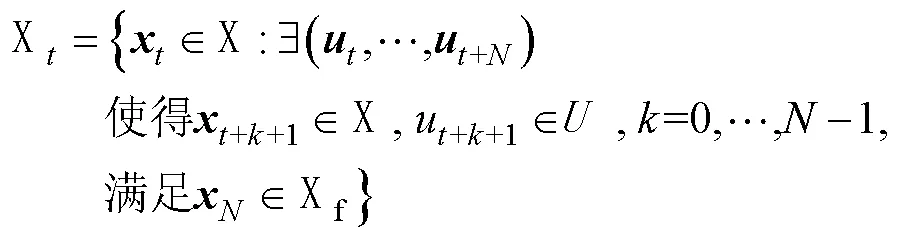
對于可行集內(nèi)的任意狀態(tài)量都可以求得最優(yōu)控制量,使得在預(yù)測時(shí)域內(nèi)的狀態(tài)量滿足約束條件。


式中,、、為系統(tǒng)約束矩陣。
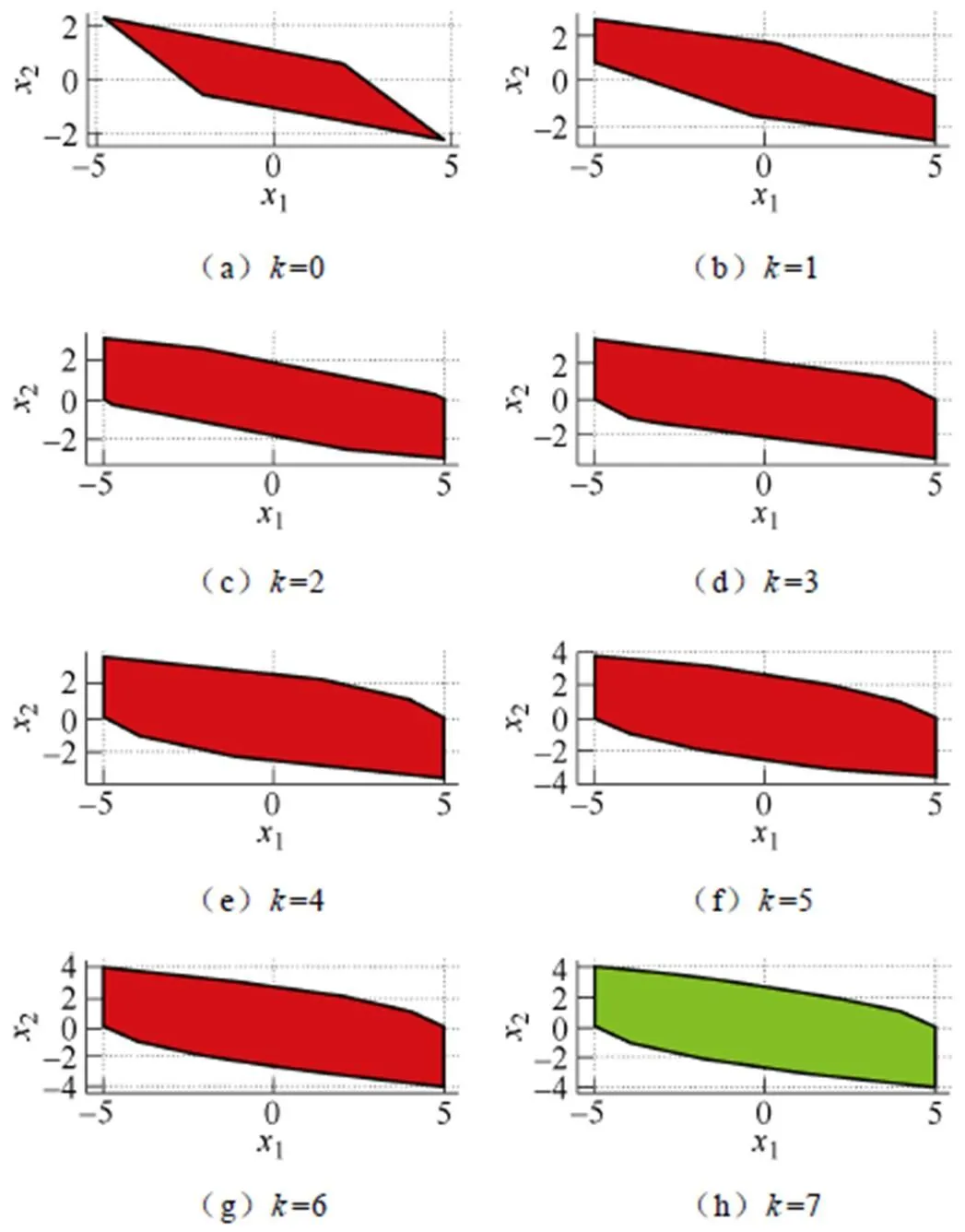
圖1 控制不變集的迭代求解
將線性系統(tǒng)本身定義的等式約束代入到代價(jià)函數(shù)中,采用批處理法將待求的多時(shí)間尺度問題轉(zhuǎn)化為基于系統(tǒng)當(dāng)前狀態(tài)值() 的單時(shí)間尺度內(nèi)的多維控制問題,有


定義時(shí)刻的新控制變量如式(7)所示,為原問題控制量及狀態(tài)量()的線性仿射組合,則式(6)所示原問題可轉(zhuǎn)化為標(biāo)準(zhǔn)的二次規(guī)劃形式如式(8)所示。



圖2 滾動(dòng)時(shí)域控制
對于式(8)所示的CFTOC問題,基于運(yùn)籌學(xué)中的多參數(shù)規(guī)劃理論將其轉(zhuǎn)化為多參數(shù)二次規(guī)劃問題(Multiparametric Quadratic Program, Mp-QP)。將狀態(tài)量看做參數(shù),研究在整個(gè)狀態(tài)范圍內(nèi)的最優(yōu)解變化趨勢,根據(jù)Karush-Kuhn-Tucker(KKT)條 件[22]離線求出在不同狀態(tài)組合下的最優(yōu)解,顯含狀態(tài)量為

Mp-QP的最優(yōu)解存在兩種情況:在約束條件內(nèi)部或者在約束條件邊界上。根據(jù)最優(yōu)解是否觸發(fā)約束條件進(jìn)行臨界區(qū)域(Critical Region, CR)劃分如式(10)所示,A()為最優(yōu)解處于約束條件邊界時(shí)的分區(qū),NA()為最優(yōu)解在約束條件內(nèi)部時(shí)的分區(qū)。

對于在NA()分區(qū)內(nèi)的最優(yōu)解,原問題等效為LQR問題,不再過多討論。對于約束條件成立的最優(yōu)解分區(qū)A(),基于KKT條件求得在不同約束條件成立下的最優(yōu)解為


式中,f為仿射函數(shù)關(guān)系;、分別為在分區(qū)內(nèi)最優(yōu)解和狀態(tài)量的仿射系數(shù)。
EMPC的實(shí)現(xiàn)思想完全涵蓋RHC的理念,實(shí)現(xiàn)邏輯如圖3所示,離線計(jì)算在不同狀態(tài)分區(qū)下的CFTOC問題最優(yōu)解,確定在狀態(tài)空間上關(guān)于最優(yōu)解的顯式函數(shù)表達(dá),在線控制算法基于狀態(tài)當(dāng)前值確定所屬臨界分區(qū)從而得到對應(yīng)的仿射控制律,只取預(yù)測時(shí)域內(nèi)的第一個(gè)控制量,作用到系統(tǒng)完成控制。最優(yōu)控制律以PWA的形式儲存在處理器中,由于函數(shù)調(diào)用中只有乘加運(yùn)算,不含除法,且分區(qū)查詢代碼也較為簡單,大大提高了MPC應(yīng)用的便利性。

圖3 EMPC控制邏輯
2 EMPC設(shè)計(jì)


圖4 EMPC電機(jī)控制框圖
2.1 離散化控制模型
EMPC設(shè)計(jì)第一步是確定系統(tǒng)預(yù)測模型及代價(jià)函數(shù),PMSM離散化電流控制模型為



預(yù)測模型確定后要定義代價(jià)函數(shù),以求得在預(yù)測時(shí)域滿足控制目標(biāo)的最優(yōu)控制量,定義EMPC電流控制代價(jià)函數(shù)為
式中,c為電流控制權(quán)重系數(shù)。
EMPC電機(jī)轉(zhuǎn)速外環(huán)模型為
在電機(jī)級聯(lián)控制中,轉(zhuǎn)速外環(huán)的輸出為電流內(nèi)環(huán)的q軸電流指令,以轉(zhuǎn)速跟蹤為控制目標(biāo),定義轉(zhuǎn)速外環(huán)代價(jià)函數(shù)為

式中,s為轉(zhuǎn)速控制權(quán)重系數(shù)。
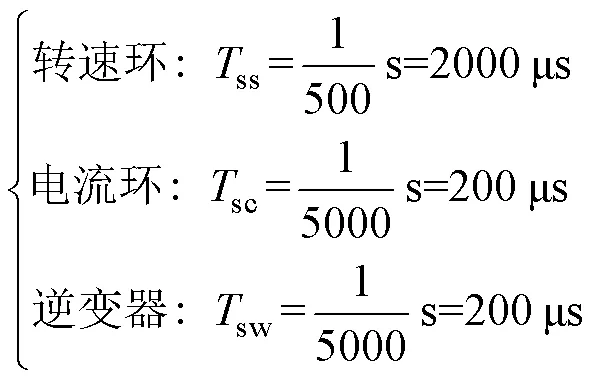
預(yù)測模型的建立需要考慮離散步長,離散步長越小意味著模型越精確。確定了預(yù)測時(shí)域及代價(jià)函數(shù)后,模型離散步長直接表征預(yù)期的響應(yīng)時(shí)間及控制量大小,因此首先要考慮控制對象的時(shí)間常數(shù),避免出現(xiàn)控制量更新頻率太快而系統(tǒng)無法響應(yīng)的情況。對于電機(jī)系統(tǒng)而言,內(nèi)外環(huán)的時(shí)間常數(shù)差異較大,采用非級聯(lián)控制可能會出現(xiàn)二者性能難以兼顧的問題,級聯(lián)控制方式的優(yōu)勢體現(xiàn)在可以對內(nèi)外環(huán)選用不同的離散步長以滿足各自需求。本次實(shí)驗(yàn)功率器件選擇ABB公司的5SNG 1000X170300的IGBT,開關(guān)頻率設(shè)置為5 kHz,電流、位置、轉(zhuǎn)速等參與控制信息的采樣頻率設(shè)置為5 kHz,電流環(huán)電氣時(shí)間常數(shù)較小,能夠?qū)崿F(xiàn)較快的動(dòng)態(tài)響應(yīng),與逆變器頻率保持一致為5 kHz,轉(zhuǎn)速環(huán)機(jī)械時(shí)間常數(shù)較大,可選擇數(shù)倍慢于內(nèi)環(huán)的控制頻率運(yùn)行,經(jīng)多次仿真與實(shí)驗(yàn),設(shè)置為500 Hz,有
此外還需要考慮預(yù)測時(shí)域的選擇,其表示對于系統(tǒng)未來狀態(tài)預(yù)測的拍數(shù),等于待求解最優(yōu)化控制問題及最優(yōu)解的維度,s表示在本次求解中待預(yù)測的絕對時(shí)間跨度,因此越長,對于系統(tǒng)未來的預(yù)測越全面,隨之也會加劇問題求解的難度,導(dǎo)致臨界分區(qū)數(shù)激增,由于RHC策略的存在,預(yù)測時(shí)域只需要能夠包含系統(tǒng)動(dòng)態(tài)特性即可。對于級聯(lián)控制而言,無論是從電壓指令給出到電流響應(yīng),還是從電流指令給出到轉(zhuǎn)速響應(yīng),考慮到數(shù)字控制的延遲特性,選擇預(yù)測時(shí)域=3可保證對于系統(tǒng)未來實(shí)現(xiàn)完整的預(yù)測。值得一提的是,由于約束條件的存在,使得跟蹤誤差最小的最優(yōu)解未必能在預(yù)測時(shí)域內(nèi)完成指令跟蹤。
2.2 約束條件
EMPC中以不等式約束形式對狀態(tài)量及控制量限定邊界,納入到最優(yōu)化控制問題的求解。電機(jī)系統(tǒng)在工作中受到的主要約束為電壓及電流約束,電壓約束是指電機(jī)最大輸出電壓受到電源限制,電流約束由電機(jī)溫升和功率器件所決定,有

式中,dc為直流母線電壓;max為逆變器基于SVPWM方法能產(chǎn)生的最大相電壓峰值;電流約束由電機(jī)溫升和功率器件所決定,max為電機(jī)相電流最大值。
EMPC問題不能處理如式(19)所示的非線性約束,以多邊形近似的方式將其轉(zhuǎn)化為線性約束如式(20)所示,EMPC電壓及電流約束限制如圖5所示。
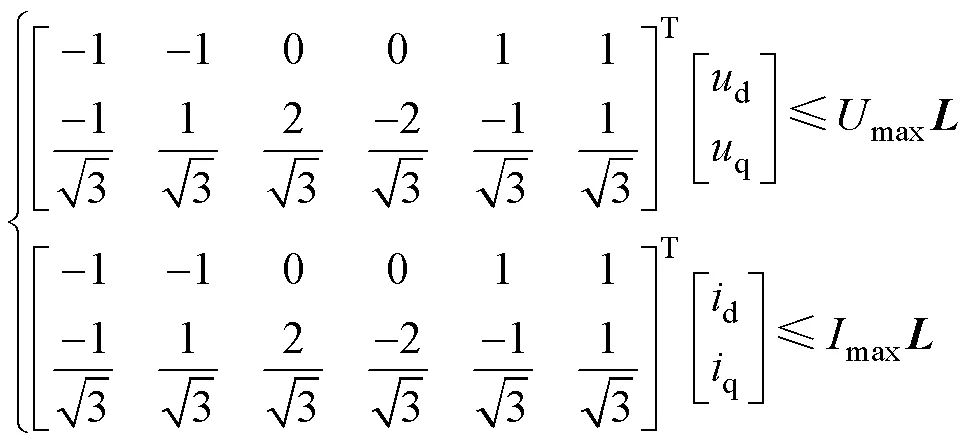
其中


圖5 電壓及電流約束
轉(zhuǎn)速外環(huán)控制在電流約束的基礎(chǔ)上,定義轉(zhuǎn)速約束以及負(fù)載轉(zhuǎn)矩約束為

2.3 參數(shù)失配
由于約束條件的存在,EMPC不具備統(tǒng)一的解析解形式,約束條件的存在有兩方面影響:一是對于控制量的直接約束;二是基于狀態(tài)約束反推的間接約束。以指令跟蹤為目標(biāo),在約束條件未激活的主分區(qū)內(nèi),分析參數(shù)失配的影響,定義在第拍的代價(jià)函數(shù)為


對控制量求梯度為0,得到在拍的無約束最優(yōu)解為


依照式(13)推導(dǎo)的電流控制模型,將式(13)代入式(23),得到電流內(nèi)環(huán)在拍的最優(yōu)解為

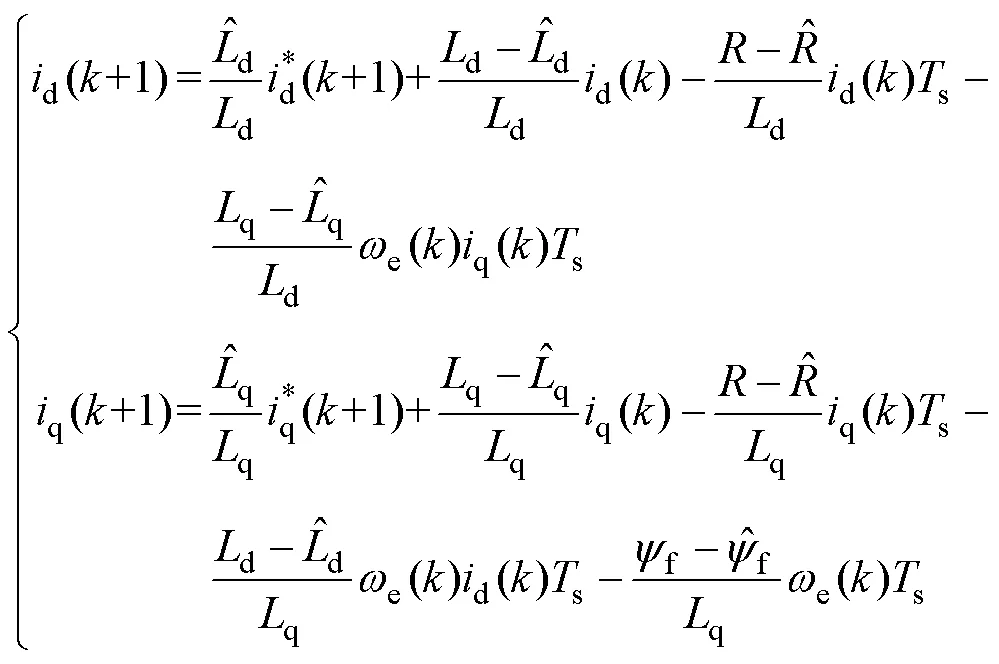
求得+1拍電流誤差如式(26)所示,當(dāng)參數(shù)誤差皆為0時(shí),電流誤差為0。



圖6 dq軸電流誤差示意圖
將式(16)代入式(23),轉(zhuǎn)速外環(huán)在拍的最優(yōu)解為

將式(27)代入轉(zhuǎn)速預(yù)測方程式(16),+1拍轉(zhuǎn)速為


2.4 數(shù)字延時(shí)
DSP的數(shù)字延時(shí)特性也屬于模型失配范疇,數(shù)字控制時(shí)序如圖8所示,簡而言之,即數(shù)字延時(shí)導(dǎo)致電壓指令無法即刻生效,在MPC的應(yīng)用中將會引起電流振蕩甚至失穩(wěn)[23]。
定義、分別為第拍的真實(shí)電壓、電流,*()為第拍計(jì)算得到的指令電壓,()為第拍的采樣電流,二者關(guān)系為

在-1拍計(jì)算的電壓指令*(-1),在拍下發(fā),記為,經(jīng)過一拍的作用產(chǎn)生電流,并于+1拍采樣,即期望在+1拍采樣的電流值到達(dá)指令值,需要于-1拍進(jìn)行計(jì)算,于拍下發(fā),有

其中





為方便理解,拍待求的最優(yōu)解*()的表達(dá)式為


在數(shù)字控制中還需要考慮角度延時(shí)帶來的問題。在FOC策略中,磁場定位的準(zhǔn)確性直接影響控制性能,當(dāng)電壓指令作用到電機(jī)時(shí),轉(zhuǎn)子已經(jīng)轉(zhuǎn)過了一定的角度,有

2.5 逆變器非線性
在EMPC應(yīng)用中,逆變器非線性將帶來兩方面影響:一是死區(qū)電壓使得EMPC電壓指令與作用到電機(jī)的真實(shí)電壓有區(qū)別,產(chǎn)生預(yù)測誤差,進(jìn)而導(dǎo)致求解的最優(yōu)控制量誤差[26],由于缺乏對于跟蹤誤差的校正機(jī)制,控制目標(biāo)將出現(xiàn)偏置誤差;二是死區(qū)電壓將會產(chǎn)生高次電流諧波,引起轉(zhuǎn)矩脈動(dòng)[27-29]。
考慮逆變器非線性效應(yīng)的負(fù)載對地電壓ag為

式中,ce、d分別為功率器件管壓降及二極管壓降;a為A相導(dǎo)通時(shí)間;sw為逆變器開關(guān)周期;a為A相電流;sign(a)為A相電流符號,定義由逆變器流向負(fù)載為正方向。可知,開關(guān)周期內(nèi)的平均電壓由導(dǎo)通時(shí)間及電流流向決定。
可求得A相電壓為

式中,b、c分別為B、C相導(dǎo)通時(shí)間。
死區(qū)時(shí)間內(nèi)上下橋臂處于關(guān)閉狀態(tài),負(fù)載通過續(xù)流二極管被鉗位至dc或0,死區(qū)效應(yīng)下有效導(dǎo)通時(shí)間為
在死區(qū)影響下的A相電壓為

圖9 死區(qū)失真電壓(A相)
Fig.9 Dead zone distortion voltage (phase A)
體現(xiàn)在DSP數(shù)字化實(shí)現(xiàn)過程中,對EMPC查詢得到的最優(yōu)電壓控制量進(jìn)行電壓重構(gòu),首先將三相失真電壓變換到dq坐標(biāo)系,有

2.6 無靜差跟蹤
模型失配是MPC算法在應(yīng)用中的共性問題,包括預(yù)測模型之外的擾動(dòng)及模型內(nèi)參數(shù)失配[30-31],2.3~2.5節(jié)皆屬于模型失配范疇。由于EMPC的最優(yōu)控制量只取決于當(dāng)前狀態(tài)值,與歷史無關(guān),因此無法保證系統(tǒng)實(shí)現(xiàn)無靜差跟蹤,常見的方法是構(gòu)建擾動(dòng)模型[32-33]或者在環(huán)路中加入積分器[2]。本文構(gòu)建非線性積分環(huán)節(jié)為

體現(xiàn)在EMPC數(shù)字化實(shí)現(xiàn)過程中,即在拍進(jìn)行臨界分區(qū)查詢時(shí)將式(36)所示的狀態(tài)量更新為

2.7 EMPC實(shí)現(xiàn)
基于KKT條件的CFTOC問題離線求解需要進(jìn)行約束條件與最優(yōu)解的邏輯判定。隨著系統(tǒng)狀態(tài)量維度的增高,人工求解的難度大大提升,本文使用基于Matlab軟件的多參數(shù)工具箱(Multi-Parametric Toolbox 3.0)完成問題定義及求解[34]。按照2.1節(jié)、2.2節(jié)定義的問題及約束條件,定義母線電壓約束峰值dc=150 V,電流峰值max=100 A,預(yù)測時(shí)域=3,算法實(shí)現(xiàn)流程如圖10所示,左側(cè)為離線部分,展示從系統(tǒng)定義到最優(yōu)控制律代碼生成的過程,并標(biāo)注了MPT3工具箱相關(guān)函數(shù),主要函數(shù)用法在本文附錄中展示;右側(cè)為在線部分,展示最優(yōu)控制律查詢及相關(guān)非理想因素補(bǔ)償策略。


圖11 EMPC臨界分區(qū)-電流控制
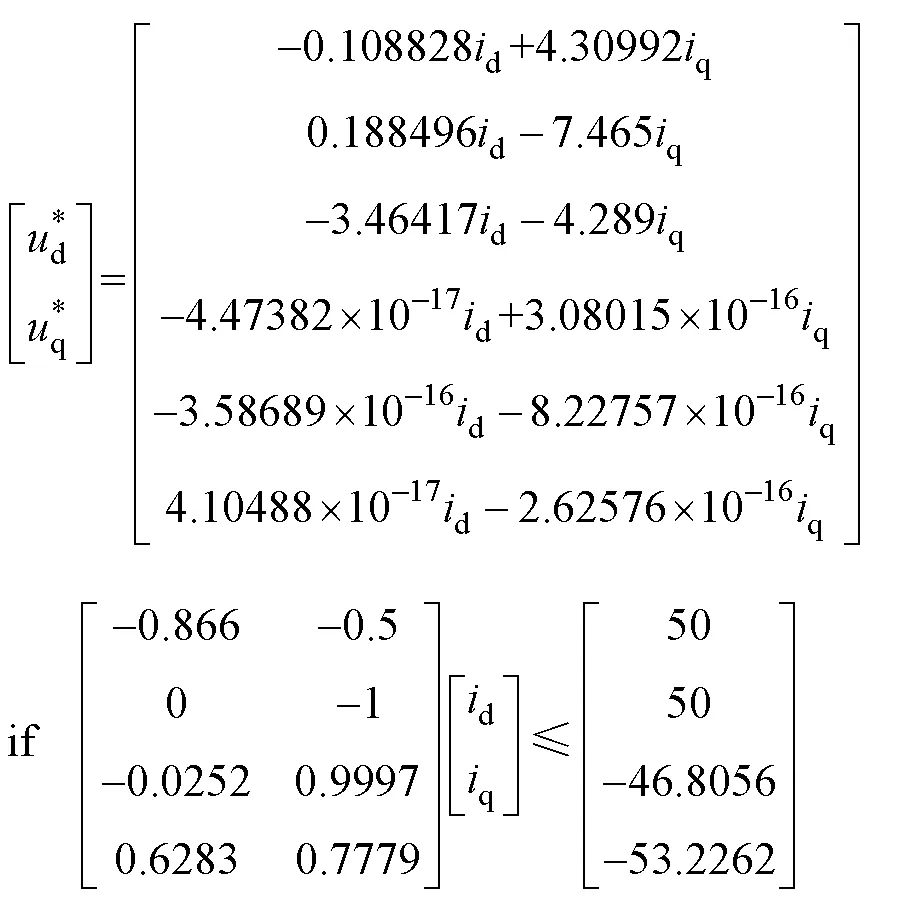
圖13 EMPC臨界分區(qū)-轉(zhuǎn)速控制
Fig.13 EMPC critical region-speed control

不同分區(qū)內(nèi)的最優(yōu)代價(jià)函數(shù)如圖14所示,可知除無解分區(qū)外,還存在代價(jià)函數(shù)不等于0的分區(qū),即約束條件的存在使得最優(yōu)解在預(yù)測時(shí)域內(nèi)無法完成跟蹤目標(biāo)。
圖14 EMPC臨界分區(qū)-轉(zhuǎn)速控制
Fig.14 EMPC critical region-speed control
3 仿真驗(yàn)證

3.1 電流控制

表1 永磁同步電機(jī)參數(shù)

圖15 參數(shù)失配-電流控制仿真
圖16a、圖16b為死區(qū)影響下的EMPC電流控制效果,圖16c為d、q電流快速傅里葉變換(Fast Fourier Transform, FFT)分析,二者皆出現(xiàn)了明顯的6次諧波,且q軸電流已經(jīng)無法完成指令跟蹤。基于式(41)~式(43)進(jìn)行電壓重構(gòu)后有效解決了偏置誤差及電流諧波的問題。
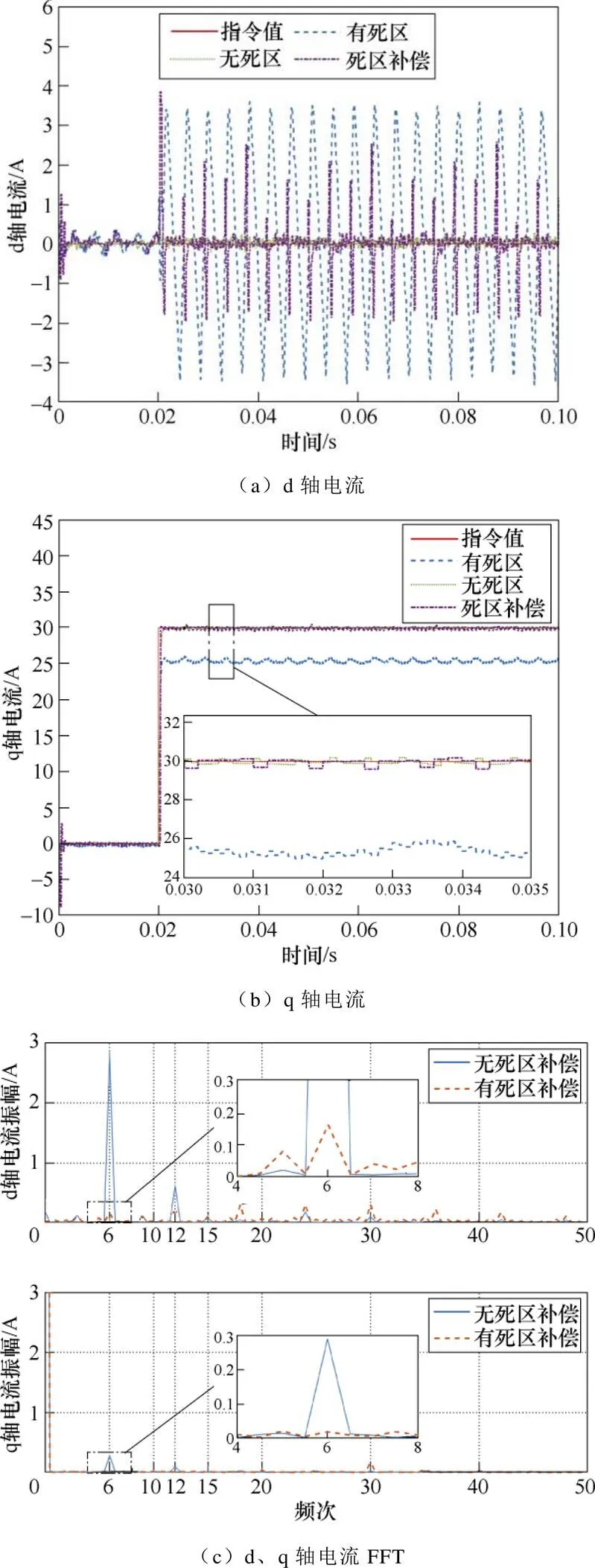
圖16 死區(qū)效應(yīng)-電流控制仿真
圖17a、圖17b展示d、q軸電流由DSP數(shù)字延時(shí)及角度延時(shí)帶來的影響,以及基于式(35)~式(37)的補(bǔ)償效果。如2.4節(jié)分析,數(shù)字延時(shí)將導(dǎo)致大幅電流振蕩,角度延時(shí)導(dǎo)致FOC磁場定位偏差,在d軸上出現(xiàn)偏置誤差。

圖17 數(shù)字延時(shí)、角度延時(shí)-電流控制仿真
3.2 轉(zhuǎn)速控制
轉(zhuǎn)速控制仿真設(shè)定永磁同步電機(jī)工作在轉(zhuǎn)矩模式,在0.02 s處給定轉(zhuǎn)速階躍指令*=600 r/min,0.06 s處給定負(fù)載階躍l=20 N·m。圖18展示各項(xiàng)參數(shù)失配對于轉(zhuǎn)速控制的影響以及加入非線性積分后的控制效果,結(jié)合式(29)分析結(jié)果,轉(zhuǎn)速控制穩(wěn)態(tài)精度受磁鏈參數(shù)影響較明顯,本文后續(xù)實(shí)驗(yàn)中選擇非線性積分系數(shù)s=0.01。圖19為轉(zhuǎn)速控制中的死區(qū)效應(yīng)以及死區(qū)補(bǔ)償效果,在未加死區(qū)補(bǔ)償工況下,EMPC轉(zhuǎn)速控制無法完成無靜差跟蹤。

圖18 參數(shù)失配-轉(zhuǎn)速控制仿真

圖19 死區(qū)效應(yīng)-轉(zhuǎn)速控制仿真
4 實(shí)驗(yàn)驗(yàn)證
搭建了基于TI公司TMS320F2838d作為主控芯片的實(shí)驗(yàn)平臺,該芯片有兩個(gè)C28x架構(gòu)的32位CPU,每個(gè)CPU各有44 KB的本機(jī)RAM及共享128 KB的全局RAM。EMPC最優(yōu)控制律轉(zhuǎn)化為C代碼后,控制律系數(shù)以數(shù)組形式保存,芯片內(nèi)存占用如圖20所示,單位為字(2 bytes),共生成以MPT為前綴的8個(gè)數(shù)組。圖20中,以_S為后綴的是轉(zhuǎn)速控制分區(qū)數(shù)組,無后綴的是電流控制分區(qū)數(shù)組。其中MPT_ABNC數(shù)組用于判定當(dāng)前狀態(tài)量是否處于全局狀態(tài)約束范圍內(nèi),MPT_HTBFTBGTB數(shù)組用于判定當(dāng)前狀態(tài)量所處的臨界分區(qū)編號,MPT_FG數(shù)組為該分區(qū)內(nèi)的最優(yōu)控制律系數(shù)。芯片內(nèi)存占用空間如式(48)所示,轉(zhuǎn)速控制分區(qū)數(shù)組占用空間1 418×2 bytes,約2.8 KB,電流控制分區(qū)數(shù)組占用空間13 226×2 bytes,約26.4 KB。逆變器開關(guān)頻率s=5 kHz,控制周期總時(shí)長為200ms,在轉(zhuǎn)速環(huán)與電流環(huán)查詢程序前后分別對GPIO引腳進(jìn)行置位,通過示波器采集引腳電平得到的程序運(yùn)行時(shí)間如圖21所示,轉(zhuǎn)速環(huán)程序查詢時(shí)間為12.364 8ms,電流環(huán)程序查詢時(shí)間為54.110 4ms。

控制器同時(shí)驅(qū)動(dòng)兩臺永磁同步電機(jī)同軸共母線運(yùn)行,共享控制信息,L電機(jī)工作在電流環(huán)、R電機(jī)工作在轉(zhuǎn)速環(huán),A電機(jī)工作在電流環(huán)、B電機(jī)工作在轉(zhuǎn)速環(huán),電機(jī)臺架及控制器如圖22所示。
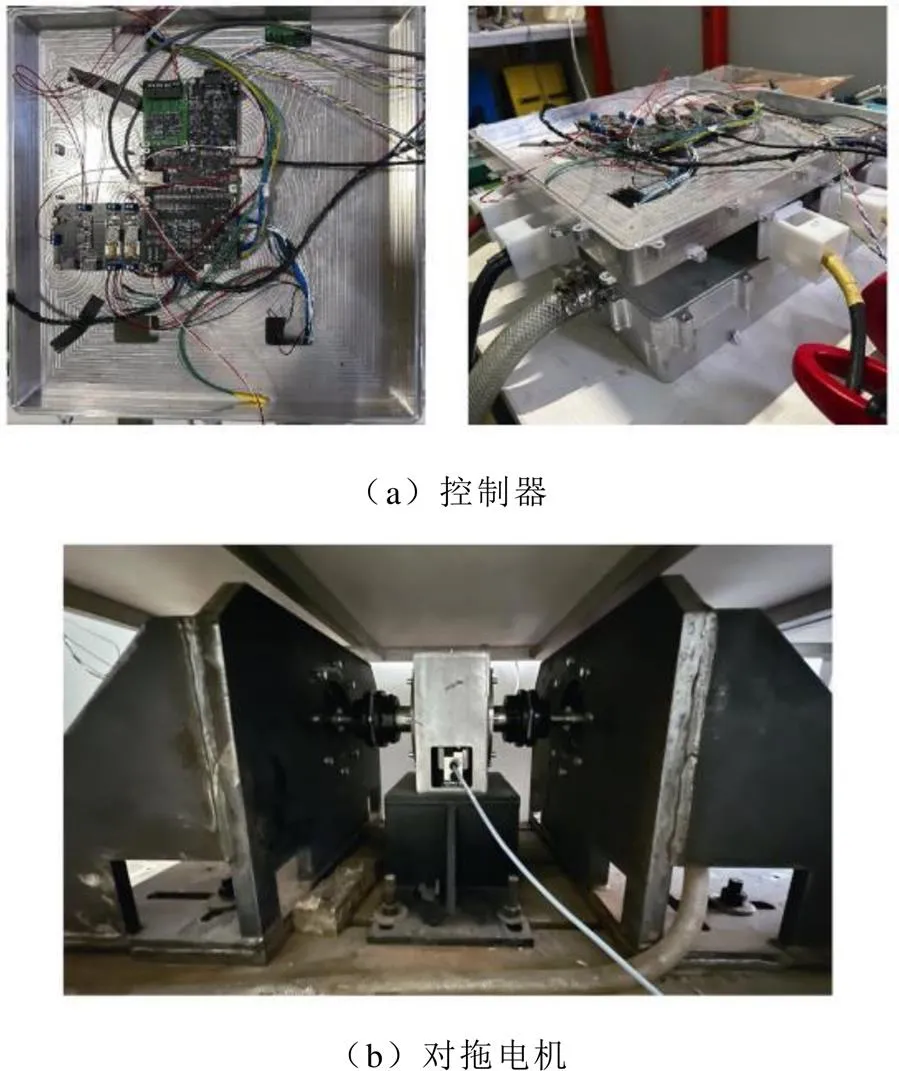
圖22 對拖實(shí)驗(yàn)平臺
4.1 電流控制
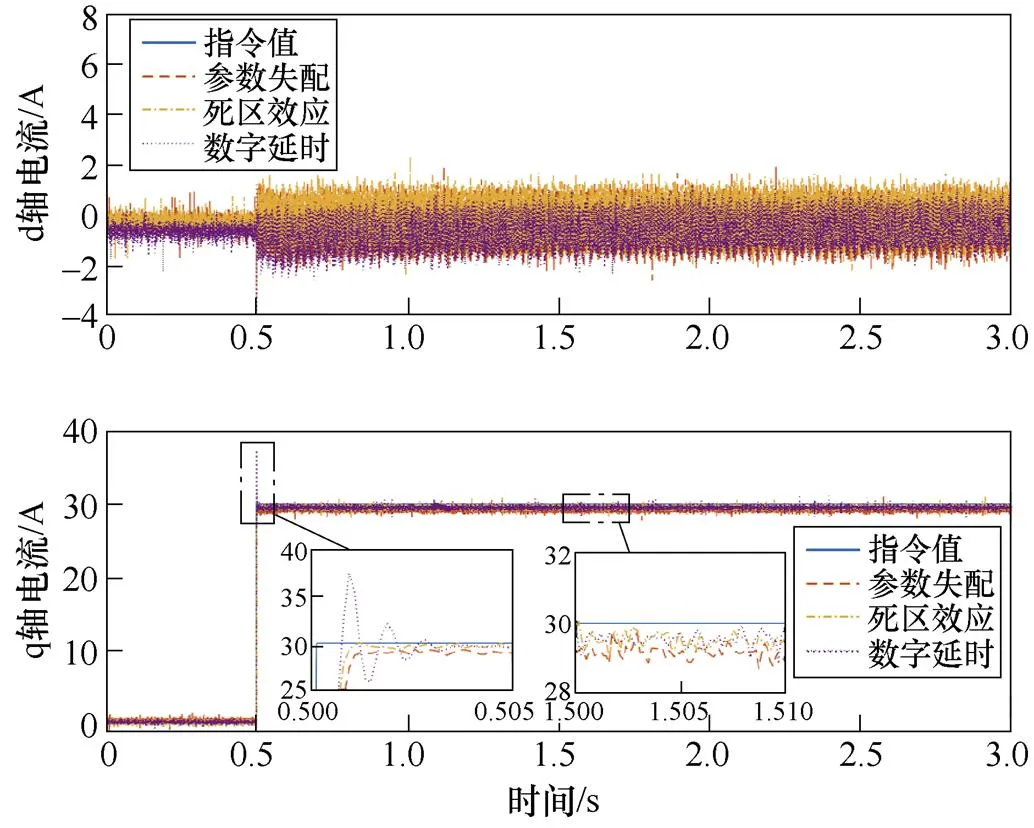
圖23 參數(shù)失配、死區(qū)效應(yīng)、數(shù)字延時(shí)-電流控制實(shí)驗(yàn)
保留失配參數(shù)及死區(qū)時(shí)間,對各類非理想因素進(jìn)行補(bǔ)償后,圖24a、圖24b展示在相同工況下EMPC與PI兩種控制策略的效果對比,圖24c展示兩種算法的電壓指令對比及不同狀態(tài)下EMPC激活的臨界分區(qū)。PI控制中由于環(huán)路之間的耦合影響,q軸電流加載給d軸電流帶來明顯的擾動(dòng)影響,經(jīng)過0.1 s后回到穩(wěn)態(tài),q軸電流于0.5 s處加載后,經(jīng)過0.1 s到達(dá)指令值,且伴隨著一定的超調(diào);EMPC算法于0.5 s處給定電流指令,指令下發(fā)之前,電機(jī)處于臨界分區(qū)7,在指令響應(yīng)初期電機(jī)狀態(tài)發(fā)生變化,切換到臨界分區(qū)22,該分區(qū)內(nèi)控制電壓運(yùn)行在約束邊界,保證最大化的電壓利用率,d、q軸電流皆經(jīng)過7個(gè)控制周期到達(dá)指令值,用時(shí)0.001 4 s,相較PI算法表現(xiàn)出明顯的快速性,有效降低耦合效應(yīng)的同時(shí)無超調(diào)現(xiàn)象,進(jìn)入穩(wěn)態(tài)后最優(yōu)控制電壓處于約束內(nèi)部,切換到臨界分區(qū)17。需要注意的是,EMPC最優(yōu)控制律是控制電壓與臨界分區(qū)內(nèi)狀態(tài)量的仿射關(guān)系,并不指代控制電壓量本身,7與17各自指代一組控制律,該分區(qū)內(nèi)對應(yīng)的最優(yōu)控制量皆處于約束內(nèi)部,22分區(qū)對應(yīng)的最優(yōu)控制量都處于約束邊界。圖25展示兩種算法d、q軸電流FFT分析結(jié)果,相較于PI控制,EMPC算法表現(xiàn)出了更好的諧波電流抑制能力。
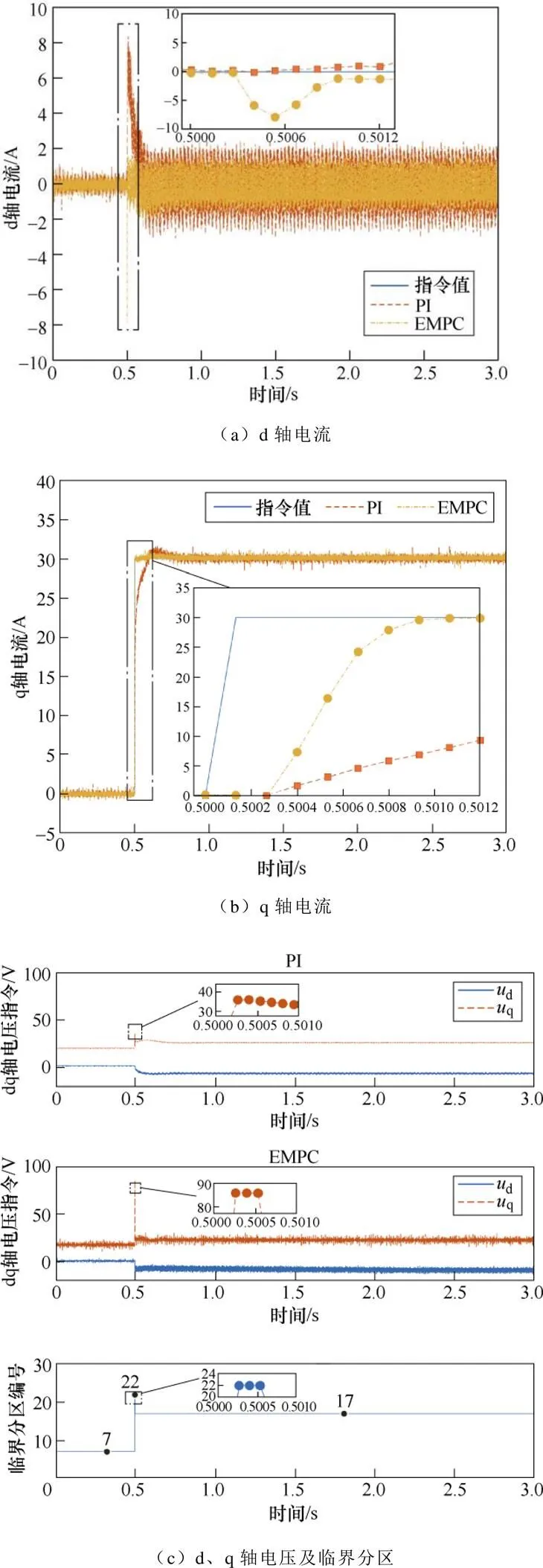
圖24 EMPC、PI電流控制實(shí)驗(yàn)
4.2 轉(zhuǎn)速控制
轉(zhuǎn)速實(shí)驗(yàn)工況與仿真保持一致,給定R電機(jī)轉(zhuǎn)速階躍指令*=600 r/min,圖26展示在參數(shù)失配及死區(qū)效應(yīng)影響下的轉(zhuǎn)速控制效果,二者都產(chǎn)生了偏置誤差,與2.3、2.5、3.2節(jié)仿真及理論分析吻合。
對非理想因素進(jìn)行補(bǔ)償后,圖27a展示EMPC與PI兩種控制策略的效果對比,于0.5 s處給定轉(zhuǎn)速指令,PI算法經(jīng)過1 s到達(dá)穩(wěn)態(tài),伴隨著較為明顯的超調(diào)現(xiàn)象;EMPC算法經(jīng)過0.3 s到達(dá)指令值且無超調(diào)現(xiàn)象。轉(zhuǎn)速環(huán)的最優(yōu)控制量為電流環(huán)q軸電流指令,圖27b展示動(dòng)態(tài)過程中兩種算法的q軸電流指令對比及EMPC臨界分區(qū)切換情況,轉(zhuǎn)速環(huán)模型不存在如電流環(huán)模型d、q軸的狀態(tài)耦合。PI控制在指令跟蹤初期也可以響應(yīng)最大約束電流,但是由于機(jī)械環(huán)節(jié)響應(yīng)速度較慢,基于誤差調(diào)節(jié)的方式無法快速找到最優(yōu)解,仍然有超調(diào)現(xiàn)象存在。EMPC算法在動(dòng)態(tài)響應(yīng)過程中最優(yōu)控制量到達(dá)約束邊界,臨界分區(qū)由9切換到15,進(jìn)入穩(wěn)態(tài)后控制量回到約束內(nèi)部,切換到12。圖27c展示電流內(nèi)環(huán)控制電壓指令。4.1節(jié)對EMPC電流控制分析完畢,此處不再展開。

圖25 EMPC、PI FFT-電流控制實(shí)驗(yàn)
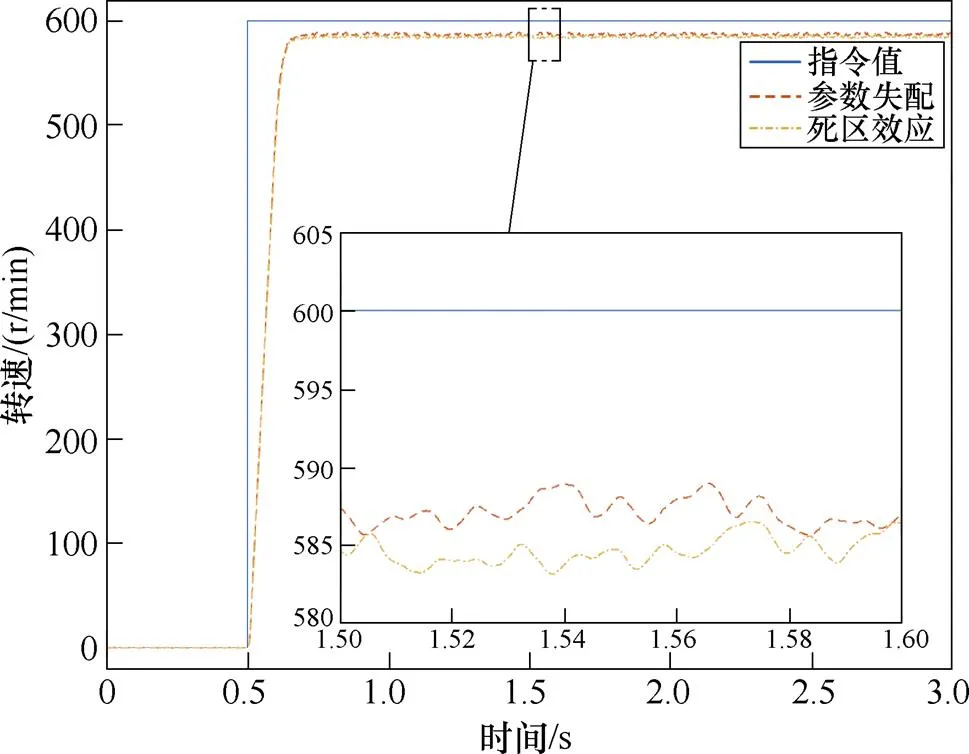
圖26 參數(shù)失配、死區(qū)效應(yīng)-轉(zhuǎn)速控制實(shí)驗(yàn)

圖27 EMPC、PI-轉(zhuǎn)速控制實(shí)驗(yàn)
保持相同的控制參數(shù),R電機(jī)進(jìn)入穩(wěn)態(tài)后,由L電機(jī)給定30 A電流負(fù)載,圖28a為PI與EMPC兩種算法在突加負(fù)載時(shí)的轉(zhuǎn)速數(shù)據(jù)對比。PI控制最大超調(diào)量65 r/min,經(jīng)過0.5 s回到穩(wěn)態(tài);EMPC算法最大超調(diào)量6 r/min,經(jīng)過0.1 s回到穩(wěn)態(tài),電流動(dòng)態(tài)響應(yīng)更為平滑。圖28b展示兩種算法q軸電流指令對比及EMPC臨界分區(qū),EMPC電流指令平滑無振蕩,保證了在擾動(dòng)下對于轉(zhuǎn)速指令的快速響應(yīng),該工況下臨界分區(qū)保持在12,最優(yōu)控制律未發(fā)生變化,圖28c展示電流內(nèi)環(huán)控制電壓指令。
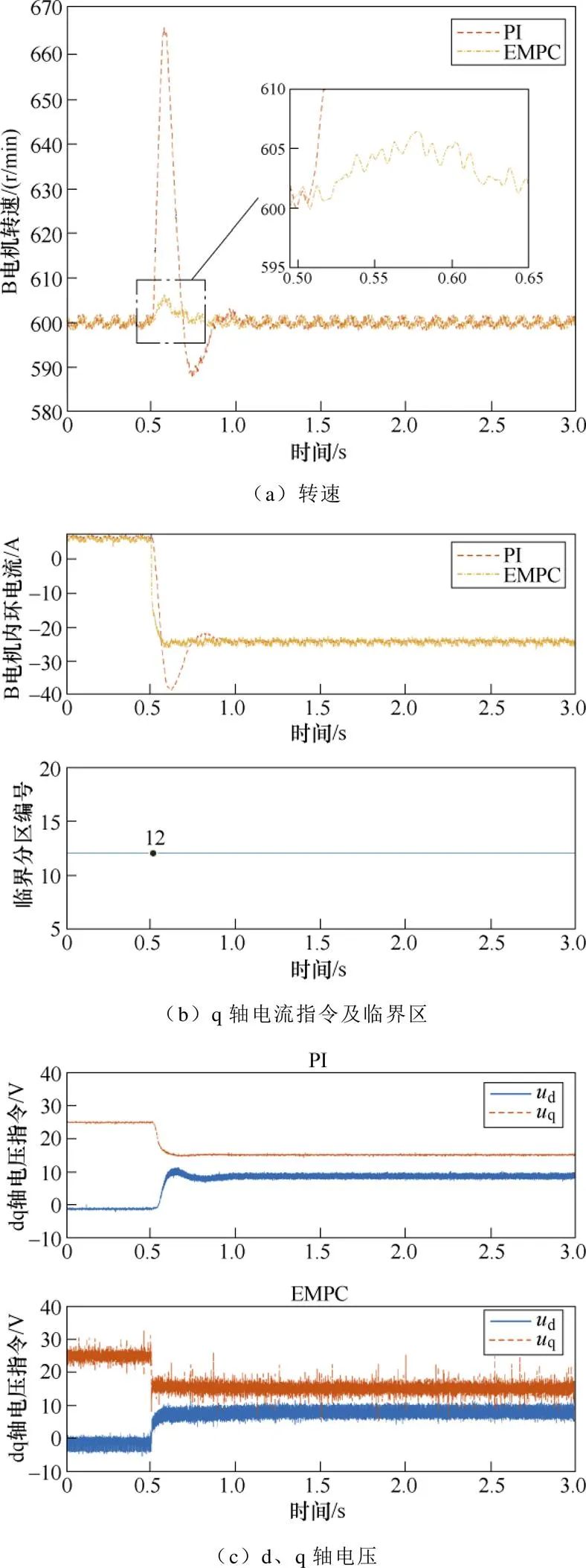
圖28 EMPC、PI-轉(zhuǎn)速控制實(shí)驗(yàn)
5 結(jié)論
本文針對高性能永磁同步電機(jī)控制提出一種級聯(lián)式EMPC算法,以電流及轉(zhuǎn)速跟蹤目標(biāo)為代價(jià)函數(shù),通過離線求解有約束問題的最優(yōu)解,以分段仿射函數(shù)的顯式表達(dá)存儲于多面體臨界分區(qū)中,解決了傳統(tǒng)MPC在線求解算力消耗大的問題。基于多參數(shù)規(guī)劃思想完成系統(tǒng)線性化建模,消除了電機(jī)系統(tǒng)環(huán)路之間的耦合項(xiàng)及非線性轉(zhuǎn)速項(xiàng)帶來的擾動(dòng)。在模型中加入非線性積分環(huán)節(jié),普適性地解決了各類模型失配帶來的影響。通過仿真及實(shí)驗(yàn)驗(yàn)證了算法的有效性及優(yōu)越性,得到以下結(jié)論:
1)相較于抗飽和策略只能應(yīng)用于一些特定工作點(diǎn),并可能導(dǎo)致系統(tǒng)的不穩(wěn)定,EMPC算法將模型及各類約束條件納入控制問題的求解,包含了控制過程中所有的動(dòng)態(tài)特征,保證系統(tǒng)線性穩(wěn)定的同時(shí)得到了更好的動(dòng)態(tài)性能。
2)相較于PI控制,EMPC算法的高帶寬特性使其具有更快的動(dòng)態(tài)響應(yīng)速度及諧波抑制能力;基于多變量控制思想的設(shè)計(jì)方法使其不再需要考慮系統(tǒng)狀態(tài)之間的耦合作用;基于可行域求解的最優(yōu)控制量可以滿足全域的控制需求,不再需要根據(jù)工況進(jìn)行繁瑣的調(diào)參工作。
附錄 MPT3工具箱函數(shù)介紹
MPT3工具箱網(wǎng)址:http://www.tbxmanager.com/
1. Model=LTISystem (‘A’, A, ‘B’, B, ‘C’, C, ‘D’, D, ‘T_s ’, Ts):系統(tǒng)定義函數(shù),定義線性時(shí)不變系統(tǒng),ABCD矩陣定義如2.1節(jié)及表1所示。
2. Ctrl=MPCController (model, horizon):控制器函數(shù),基于線性時(shí)不變系統(tǒng)定義,horizon為預(yù)測時(shí)域。
3. Px/Pu=Polyhedron (‘A’, A, ‘b’, b):多面體函數(shù),定義約束多面體,{|≤}。
4. x/u.setConstraint ( ):對狀態(tài)量及控制量分別設(shè)置控制器約束。
5. y.reference ( ):設(shè)置輸出參考指令。
6. y.penalty ( ):設(shè)置輸出懲罰系數(shù)。
7. Ectrl=model.toExplicit:將控制器轉(zhuǎn)化為顯式MPC。
8. Ectrl.exportToC:將最優(yōu)控制律轉(zhuǎn)化為C代碼。
[1] Cui Kai, Wang Chenchen, Gou Lifeng, et al. Analysis and design of current regulators for PMSM drives based on DRGA[J]. IEEE Transactions on Trans- portation Electrification, 2020, 6(2): 659-667.
[2] Belda K, Vo?mik D. Explicit generalized predictive control of speed and position of PMSM drives[J]. IEEE Transactions on Industrial Electronics, 2016, 63(6): 3889-3896.
[3] Mariethoz S, Domahidi A, Morari M. High-bandwidth explicit model predictive control of electrical drives[J]. IEEE Transactions on Industry Applications, 2012, 48(6): 1980-1992.
[4] De Doná J A, Goodwin G C, Seron M M. Anti-windup and model predictive control: reflections and con- nections[J]. European Journal of Control, 2000, 6(5): 467-477.
[5] Richalet J, Rault A, Testud J L, et al. Model algorithmic control of industrial processes[J]. IFAC Proceedings Volumes, 1977, 10(16): 103-120.
[6] Richalet J, Rault A, Testud J L, et al. Model predi- ctive heuristic control[J]. Automatica, 1978, 14(5): 413-428.
[7] Clarke D W, Mohtadi C, Tuffs P S. Generalized predictive control-part I. the basic algorithm[J]. Automatica, 1987, 23(2): 137-148.
[8] Clarke D W, Mohtadi C, Tuffs P S. Generalized predictive control-part II extensions and inter- pretations[J]. Automatica, 1987, 23(2): 149-160.
[9] Rodriguez J, Cortes P. Predictive control of power converters and electrical drives[M]. Chichester, West Sussex, UK: John Wiley & Sons, 2012.
[10] Karamanakos P, Liegmann E, Geyer T, et al. Model predictive control of power electronic systems: methods, results, and challenges[J]. IEEE Open Journal of Industry Applications, 2020, 1: 95-114.
[11] Zhang Yongchang, Xie Wei, Li Zhengxi, et al. Low-complexity model predictive power control: double-vector-based approach[J]. IEEE Transactions on Industrial Electronics, 2014, 61(11): 5871-5880.
[12] Zhang Yongchang, Xie Wei. Low complexity model predictive control-single vector-based approach[J]. IEEE Transactions on Power Electronics, 2014, 29(10): 5532-5541.
[13] 陳榮, 翟凱淼, 舒胡平. 永磁同步電機(jī)雙矢量固定開關(guān)頻率模型預(yù)測控制研究[J]. 電工技術(shù)學(xué)報(bào), 2023, 38(14): 3812-3823.
Chen Rong, Zhai Kaimiao, Shu Huping. Predictive control of dual vector fixed switching frequency model for permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2023, 38(14): 3812-3823.
[14] 李祥林, 薛志偉, 閻學(xué)雨, 等. 基于電壓矢量快速篩選的永磁同步電機(jī)三矢量模型預(yù)測轉(zhuǎn)矩控制[J]. 電工技術(shù)學(xué)報(bào), 2022, 37(7): 1666-1678.
Li Xianglin, Xue Zhiwei, Yan Xueyu, et al. Voltage vector rapid screening-based three-vector model predictive torque control for permanent magnet syn- chronous motor[J]. Transactions of China Elec- trotechnical Society, 2022, 37(7): 1666-1678.
[15] 張珍睿, 劉彥呈, 陳九霖, 等. 永磁同步電機(jī)幅值控制集模型預(yù)測控制策略[J]. 電工技術(shù)學(xué)報(bào), 2022, 37(23): 6126-6134.
Zhang Zhenrui, Liu Yancheng, Chen Jiulin, et al. Amplitude control set model predictive control strategy for permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2022, 37(23): 6126-6134.
[16] 鄭長明, 陽佳峰, 高昂, 等. 永磁同步電機(jī)長線變頻驅(qū)動(dòng)系統(tǒng)定頻滑模預(yù)測電流控制[J]. 電工技術(shù)學(xué)報(bào), 2023, 38(4): 915-924.
Zheng Changming, Yang Jiafeng, Gao Ang, et al. Fixed switching frequency sliding-mode predictive current control of a PMSM variable-frequency drive system with long cables[J]. Transactions of China Electrotechnical Society, 2023, 38(4): 915-924.
[17] 周奇勛, 劉帆, 吳紫輝, 等. 永磁同步電機(jī)轉(zhuǎn)矩與定子磁鏈模型預(yù)測控制預(yù)測誤差補(bǔ)償方法[J]. 電工技術(shù)學(xué)報(bào), 2022, 37(22): 5728-5739.
Zhou Qixun, Liu Fan, Wu Zihui, et al. Model predictive torque and stator flux control method for PMSMs with prediction error compensation[J]. Transactions of China Electrotechnical Society, 2022, 37(22): 5728-5739.
[18] Geyer T, Quevedo D E. Performance of multistep finite control set model predictive control for power electronics[J]. IEEE Transactions on Power Elec- tronics, 2015, 30(3): 1633-1644.
[19] Scoltock J, Geyer T, Madawala U K. A comparison of model predictive control schemes for MV induction motor drives[J]. IEEE Transactions on Industrial Informatics, 2013, 9(2): 909-919.
[20] Borrelli F, Bemporad A, Morari M. Predictive control for linear and hybrid systems[M]. New York: Cambridge University Press, 2017.
[21] Bemporad A, Morari M, Dua V, et al. The explicit linear quadratic regulator for constrained systems[J]. Automatica, 2002, 38(1): 3-20.
[22] Boyd S, Vandenberghe L. Convex optimization[M]. Cambridge, UK: Cambridge University Press, 2004.
[23] Springob L, Holtz J. High-bandwidth current control for torque-ripple compensation in PM synchronous machines[J]. IEEE Transactions on Industrial Elec- tronics, 1998, 45(5): 713-721.
[24] Abdel-Rady I M Y, El-Saadany E F. An improved deadbeat current control scheme with a novel adaptive self-tuning load model for a three-phase PWM voltage-source inverter[J]. IEEE Transactions on Industrial Electronics, 2007, 54(2): 747-759.
[25] 國敬, 范濤, 章回炫, 等. 高速低載波比下永磁同步電機(jī)電流環(huán)穩(wěn)定性分析[J]. 中國電機(jī)工程學(xué)報(bào), 2019, 39(24): 7336-7346, 7506.
Guo Jing, Fan Tao, Zhang Huixuan, et al. Stability analysis of permanent magnet synchronous motor current loop control at high speed and low carrier ratio[J]. Proceedings of the CSEE, 2019, 39(24): 7336-7346, 7506.
[26] Chen Jiahao, Mei Jie, Yuan Xin, et al. Online adapta- tion of two-parameter inverter model in sensorless motor drives[J]. IEEE Transactions on Industrial Electronics, 2022, 69(10): 9860-9871.
[27] Choi J W, Sul S K. Inverter output voltage synthesis using novel dead time compensation[J]. IEEE Transa- ctions on Power Electronics, 1996, 11(2): 221-227.
[28] Park Y, Sul S K. A novel method utilizing trapezoidal voltage to compensate for inverter nonlinearity[J]. IEEE Transactions on Power Electronics, 2012, 27(12): 4837-4846.
[29] Hwang S H, Kim J M. Dead time compensation method for voltage-fed PWM inverter[J]. IEEE Transa- ctions on Energy Conversion, 2010, 25(1): 1-10.
[30] Young H A, Perez M A, Rodriguez J. Analysis of finite-control-set model predictive current control with model parameter mismatch in a three-phase inverter[J]. IEEE Transactions on Industrial Elec- tronics, 2016, 63(5): 3100-3107.
[31] Wipasuramonton P, Zhu Z Q, Howe D. Predictive current control with current-error correction for PM brushless AC drives[J]. IEEE Transactions on Industry Applications, 2006, 42(4): 1071-1079.
[32] Muske K R, Badgwell T A. Disturbance modeling for offset-free linear model predictive control[J]. Journal of Process Control, 2002, 12(5): 617-632.
[33] Faanes A, Skogestad S. Offset-free tracking of model predictive control with model mismatch: experi- mental results[J]. Industrial & Engineering Chemistry Research, 2005, 44(11): 3966-3972.
[34] Herceg M, Kvasnica M, Jones C N, et al. Multi- parametric toolbox 3.0[C]//2013 European Control Conference (ECC), Zurich, Switzerland, 2013: 502-510.
Research on High-Performance Explicit Model Predictive Control Algorithm for Permanent Magnet Synchronous Motors
1,21,221,2
(1. University of Chinese Academy of Sciences Beijing 100049 China 2. Institute of Electrical Engineering Chinese Academy of Sciences Beijing 100190 China)
Since the 1970s, model predictive control (MPC) algorithms have proven to be effective control strategies for multi-input and multi-output nonlinear dynamic systems with complex constraints. However, due to the significant computational demands associated with optimization problems, applying MPC to control objects with fast response time requirements, such as motor systems, presents challenges in achieving iterative solutions for constrained problems within short control cycles. This paper proposes a high-performance control strategy for permanent magnet synchronous motors based on the explicit model predictive control (EMPC) concept. The strategy involves the establishment of linearized models for current and speed control using multiparametric programming to eliminate coupling effects and nonlinear influences between states. The offline solution yields optimal control actions under effective constraint conditions, stored as piecewise-affine functions. During operation, the corresponding optimal control actions are obtained by querying the partition containing the current state combination. The paper comprehensively analyzes model mismatch, digital delay, and dead-zone effects in EMPC applications and provides corresponding solutions. A fully automated dyno test platform verifies the proposed algorithm's efficacy.
The paper introduces the theoretical foundations of multiparametric programming and presents a comprehensive design process for explicit model predictive control. It establishes linearized models for controlling current and speed in permanent magnet synchronous motors while linearizing voltage and current constraints. The effects of parameter mismatch, digital delay, and inverter nonlinearity on EMPC are analyzed, and respective compensatory measures are proposed. The EMPC problem definition and optimal control law are solved using the MPT3 toolbox, displaying critical partitions and optimal cost functions under different state combinations. The simulation verifies the algorithm and the preceding analysis of various non-ideal factors. Experimental validation is conducted on a motor dyno test platform, comparing the performance of EMPC with a proportional-integral (PI) control algorithm. In the current control scenario, when given a 30 A current step command, the PI algorithm exhibits a response time of 0.1 s, while the EMPC algorithm responds in 0.001 4 s. In speed control, with a 600 r/min speed step command, the PI algorithm takes 1 s to respond, whereas the EMPC algorithm responds in 0.3 s. When subjected to load disturbances, the PI algorithm reaches a steady state after 0.5 s, while the EMPC algorithm reaches a steady state after 0.1 s. The experimental results demonstrate that EMPC effectively reduces coupling effects without overshooting because each control is optimized under constraints, exhibiting superior harmonic current suppression capabilities.
Based on the theoretical analysis and experimental results, the following conclusions can be drawn:
(1) The EMPC algorithm incorporates models and various constraints into the control problem, which can encompass all dynamic characteristics during the control process, guarantee linear stability, and achieve better dynamic performance compared to anti-saturation strategies.
(2) Due to the high bandwidth characteristic, the EMPC algorithm has faster dynamic response and harmonic suppression than PI control. The design approach based on multivariable control does not consider coupling effects between system states, and the optimal control action obtained through feasible region-solving meets global control requirements. Thus, it eliminates the need for cumbersome tuning based on operating conditions.
Permanent magnet synchronous motor (PMSM), explicit model predictive control, optimal control, speed prediction control, current prediction control
劉忠永 男,1995年生,博士研究生,研究方向?yàn)橛来磐诫姍C(jī)控制、模型預(yù)測控制等。E-mail: lzy@mail.iee.ac.cn
范 濤 男,1981年生,研究員,博士生導(dǎo)師,研究方向?yàn)橛来烹姍C(jī)分析與優(yōu)化設(shè)計(jì)、先進(jìn)電機(jī)控制、高性能電力電子裝備電子系統(tǒng)設(shè)計(jì)開發(fā)等。E-mail: fantao@mail.iee.ac.cn(通信作者)
TM341
10.19595/j.cnki.1000-6753.tces.230547
國家重點(diǎn)研發(fā)計(jì)劃資助項(xiàng)目(2021YFB2500600)。
2023-04-27
2023-06-07
(編輯 崔文靜)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
測控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(xué)(2016年10期)2016-11-23 05:11:56
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
西安航空學(xué)院學(xué)報(bào)(2014年5期)2014-07-13 01:27:52

- 電工技術(shù)學(xué)報(bào)的其它文章
- 考慮外部博弈和內(nèi)部協(xié)同的耦合系統(tǒng)時(shí)序隨機(jī)生產(chǎn)模擬
- “電動(dòng)汽車驅(qū)動(dòng)電機(jī)系統(tǒng)”專題特約主編寄語
- 帶有LC正弦波濾波器的內(nèi)置式永磁同步電機(jī)電流控制器諧振抑制參數(shù)設(shè)計(jì)
- 考慮電-氣-熱-交通相互依存的城市能源系統(tǒng)韌性評估與提升方法
- 基于環(huán)流時(shí)頻圖譜的抽水蓄能機(jī)組勵(lì)磁繞組匝間短路故障診斷
- 低光能觸發(fā)的砷化鎵光導(dǎo)開關(guān)導(dǎo)通機(jī)理