帶有LC正弦波濾波器的內(nèi)置式永磁同步電機(jī)電流控制器諧振抑制參數(shù)設(shè)計(jì)
2023-11-22 10:46:26劉志恒韓耀飛何鳳有
電工技術(shù)學(xué)報(bào) 2023年22期
關(guān)鍵詞:系統(tǒng)
吳 翔 李 超 劉志恒 韓耀飛 何鳳有
帶有LC正弦波濾波器的內(nèi)置式永磁同步電機(jī)電流控制器諧振抑制參數(shù)設(shè)計(jì)
吳 翔1李 超1劉志恒1韓耀飛2何鳳有1
(1. 中國(guó)礦業(yè)大學(xué)電氣工程學(xué)院 徐州 221008 2. 同濟(jì)大學(xué)磁浮交通工程技術(shù)研究中心 上海 200092)
帶有LC正弦波濾波器的內(nèi)置式永磁同步電機(jī)系統(tǒng)形成了一個(gè)LCL電路,矢量控制系統(tǒng)的穩(wěn)定性會(huì)受到LCL電路固有諧振現(xiàn)象的影響。通過(guò)在電流控制器中引入有源阻尼可從理論上實(shí)現(xiàn)諧振抑制,為了獲得滿意的諧振抑制效果,必須對(duì)電流控制器的參數(shù)進(jìn)行合理設(shè)計(jì)。該文研究帶有LC正弦波濾波器的內(nèi)置式永磁同步電機(jī)電流控制器諧振抑制參數(shù)設(shè)計(jì)方法,分析了帶有電容電流反饋有源阻尼(CCFAD)的電流控制器的頻率特性,通過(guò)頻域穩(wěn)定判據(jù)分析了電流比例積分調(diào)節(jié)器參數(shù)、有源阻尼系數(shù)、LC正弦波濾波器參數(shù)與電機(jī)參數(shù)對(duì)系統(tǒng)諧振現(xiàn)象的影響機(jī)理,給出了電流控制器諧振抑制參數(shù)設(shè)計(jì)方法。通過(guò)實(shí)驗(yàn)驗(yàn)證了所提方法的有效性。
LC正弦波濾波器 內(nèi)置式永磁同步電機(jī) PI控制器 有源阻尼
0 引言
內(nèi)置式永磁同步電機(jī)(Interior Permanent Magnet Synchronous Motor, IPMSM)通常是由電壓源型逆變器(Voltage-Source Inverter, VSI)供電,功率開關(guān)器件快速開關(guān)動(dòng)作引發(fā)較大的電壓變化率d/d,帶來(lái)了一些不可忽視的負(fù)面效應(yīng),如電機(jī)絕緣應(yīng)力增加[1]、引發(fā)軸電壓和軸電流[2]、產(chǎn)生突出的電磁干擾[3]。在一些特殊工業(yè)應(yīng)用場(chǎng)景中,如海洋勘測(cè)、油田鉆井、采礦業(yè)等,VSI安裝位置與IPMSM距離較遠(yuǎn),“長(zhǎng)線效應(yīng)”使得上述負(fù)面效應(yīng)更加突出[4]。在VSI與IPMSM之間安裝d/d濾波器[5-7]能夠一定程度上緩解上述負(fù)面效應(yīng),但只對(duì)一定的電纜長(zhǎng)度適用[8]。LC正弦波濾波器能夠?qū)SI輸出的電壓轉(zhuǎn)換成正弦波,適用于任何長(zhǎng)度的線纜,能有效解決上述問(wèn)題[9-19]。帶LC正弦波濾波器的IPMSM驅(qū)動(dòng)系統(tǒng)如圖1所示。
然而,LC正弦波濾波器的加入使系統(tǒng)模型階數(shù)增加,且會(huì)產(chǎn)生固有的諧振現(xiàn)象,對(duì)IPMSM的電流控制器設(shè)計(jì)提出了挑戰(zhàn)。在LC正弦波濾波器中增加額外的電阻器是抑制諧振的有效方法[20],此種方法被定義為無(wú)源阻尼法,但電阻器的引入不可避免地給系統(tǒng)帶來(lái)額外有功功率損耗,降低了系統(tǒng)效率。
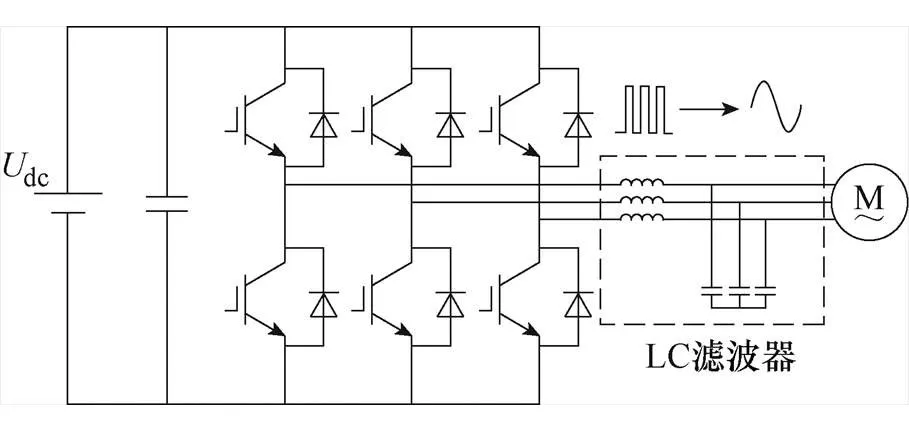
圖1 帶LC正弦波濾波器的IPMSM驅(qū)動(dòng)系統(tǒng)
為了減小功率損耗,有源阻尼法通過(guò)在控制器中引入虛擬的電阻,在無(wú)需增加額外損耗的情況下即可實(shí)現(xiàn)抑制諧振的目的。文獻(xiàn)[13-14]針對(duì)帶有LC正弦波濾波器的感應(yīng)電機(jī)驅(qū)動(dòng)系統(tǒng),提出了一種電感電流反饋有源阻尼方法,通過(guò)在電感上串聯(lián)虛擬電阻的方式抑制諧振。文獻(xiàn)[15]研究了基于電容電壓補(bǔ)償?shù)挠性醋枘岬闹C振抑制方法,將電容電壓與有源阻尼系數(shù)的乘積疊加在逆變器輸出電壓指令上,其控制效果相當(dāng)于在電容支路串聯(lián)一個(gè)虛擬電阻。文獻(xiàn)[16]研究了一種電容電流反饋有源阻尼(Capacitor- Current-Feedback-Active-Damping, CCFAD)方法,將電容電流與有源阻尼系數(shù)的乘積疊加在逆變器輸出電壓指令上,相當(dāng)于在電容支路并聯(lián)一個(gè)虛擬電阻。針對(duì)帶有LCL正弦波濾波器的永磁同步電機(jī)驅(qū)動(dòng)系統(tǒng),文獻(xiàn)[17]在同步旋轉(zhuǎn)坐標(biāo)系下研究了CCFAD方案,并提出了一種新型的電流解耦策略。此外,還有學(xué)者提出了一些新型低損耗諧振抑制方法,如文獻(xiàn)[18]研究了模型預(yù)測(cè)電流控制器中有源阻尼控制器的設(shè)計(jì)方法。文獻(xiàn)[19]通過(guò)優(yōu)化脈寬調(diào)制的延時(shí)時(shí)間來(lái)確保帶有LC正弦波濾波器的電機(jī)驅(qū)動(dòng)系統(tǒng)穩(wěn)定性,但實(shí)現(xiàn)方式較為復(fù)雜。
在帶有LC正弦波濾波器的IPMSM電流控制器中引入有源阻尼策略時(shí),電流環(huán)所采用的比例積分(Proportional Integral, PI)控制參數(shù)與有源阻尼系數(shù)的設(shè)置對(duì)系統(tǒng)的穩(wěn)定性至關(guān)重要。然而,現(xiàn)有文獻(xiàn)對(duì)于帶有LC正弦波濾波器的交流電機(jī)電流控制器諧振抑制參數(shù)設(shè)計(jì)的研究成果較少。文獻(xiàn)[13-15]針對(duì)感應(yīng)電機(jī),給出了在特定PI控制器參數(shù)的基礎(chǔ)上有源阻尼系數(shù)的設(shè)計(jì)方法,未充分考慮PI控制器參數(shù)與有源阻尼系數(shù)的耦合影響機(jī)理。PI控制器參數(shù)、有源阻尼系數(shù)與IPMSM參數(shù)和LC正弦波濾波器參數(shù)之間相互耦合,如果控制器參數(shù)設(shè)置不合理,系統(tǒng)的諧振現(xiàn)象將無(wú)法得到有效抑制[13],這會(huì)導(dǎo)致系統(tǒng)產(chǎn)生很高的電壓和電流,給系統(tǒng)的運(yùn)行帶來(lái)極大的風(fēng)險(xiǎn)。
針對(duì)上述問(wèn)題,本文分析了采用矢量控制時(shí)帶有LC正弦波濾波器的IPMSM控制系統(tǒng)的電流環(huán)諧振產(chǎn)生機(jī)理,確定了影響系統(tǒng)穩(wěn)定性的主要因素。研究了帶有LC正弦波濾波器的IPMSM電流控制器諧振抑制參數(shù)設(shè)計(jì)方法,分析了含有CCFAD的電流控制器的頻率特性,通過(guò)頻域穩(wěn)定判據(jù)分析了PI控制器參數(shù)、有源阻尼系數(shù)、LC正弦波濾波器參數(shù)與IPMSM參數(shù)對(duì)系統(tǒng)諧振現(xiàn)象的影響機(jī)理,給出了電流控制器諧振抑制參數(shù)設(shè)計(jì)方法。實(shí)驗(yàn)結(jié)果驗(yàn)證了所提方法的有效性。
1 帶有LC濾波器的內(nèi)置式永磁同步電機(jī)數(shù)學(xué)模型
LC正弦波濾波器在同步旋轉(zhuǎn)坐標(biāo)系中的數(shù)學(xué)模型如下。



式中,f和f分別為L(zhǎng)C正弦波濾波器的電感和電容;id和iq為L(zhǎng)C正弦波濾波器在d、q軸上的輸入電壓;sd和sq為IPMSM在d、q軸上的輸入電壓;id和iq為L(zhǎng)C濾波器在d、q軸上的電流;sd和sq為IPMSM在d、q軸上的電流;e為IPMSM的轉(zhuǎn)子電角速度。
IPMSM在同步旋轉(zhuǎn)坐標(biāo)系下的數(shù)學(xué)模型為

式中,s為定子繞組電阻;d和q為IPMSM在d、q軸上的電感;f為IPMSM的永磁體磁鏈。
根據(jù)式(1)~式(6),將定子繞組電阻產(chǎn)生的壓降和交叉耦合項(xiàng)作為控制系統(tǒng)擾動(dòng)源,可將LC濾波器和IPMSM組成的系統(tǒng)簡(jiǎn)化為圖2所示等效電路。

圖2 帶LC正弦波濾波器的IPMSM控制系統(tǒng)等效電路
圖2b所示的q軸等效電路模型在域中的傳遞函數(shù)可以描述如下。


控制系統(tǒng)的q軸等效電路諧振頻率可表示為
2 基于CCFAD的諧振抑制策略

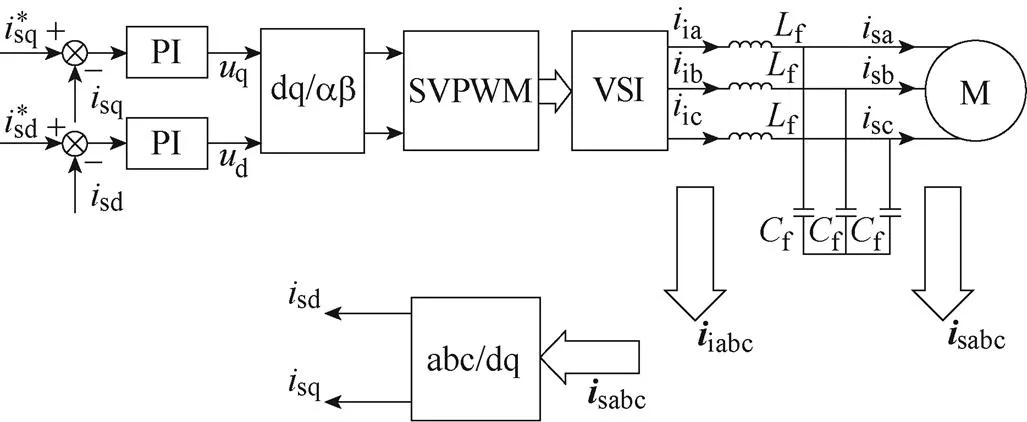
圖3 不采用有源阻尼的電流控制器架構(gòu)
2.1 傳統(tǒng)電流控制器諧振現(xiàn)象分析
當(dāng)控制系統(tǒng)電流控制器采用如圖4所示的架構(gòu)時(shí),其諧振頻率對(duì)系統(tǒng)的穩(wěn)定性會(huì)產(chǎn)生影響。圖中p和i分別為PI控制器的比例和積分系數(shù),對(duì)于圖4建立的電流控制回路,其開環(huán)傳遞函數(shù)為

式中,d為系統(tǒng)延遲時(shí)間。
圖4 q軸電流反饋的控制結(jié)構(gòu)
Fig.4 Current feedback control structure of q axis
根據(jù)Nyquist穩(wěn)定性判據(jù),當(dāng)系統(tǒng)滿足式(12)時(shí),系統(tǒng)可以達(dá)到穩(wěn)定。
式中,為開環(huán)傳遞函數(shù)中具有正實(shí)部的極點(diǎn)數(shù);+表示當(dāng)幅頻特性曲線大于0dB時(shí)相頻特性曲線正穿越(2+1)p線的次數(shù);-表示當(dāng)幅頻特性曲線大于0 dB時(shí)相頻特性曲線負(fù)穿越(2+1)p線的次數(shù)。
根據(jù)圖5所示的q軸電流反饋環(huán)路開環(huán)傳遞函數(shù)Bode圖,相頻特性曲線在諧振頻率處穿過(guò)-p,此時(shí)由于系統(tǒng)諧振的影響會(huì)產(chǎn)生遠(yuǎn)高于0 dB的幅頻特性曲線,從而使系統(tǒng)無(wú)法達(dá)到穩(wěn)定。
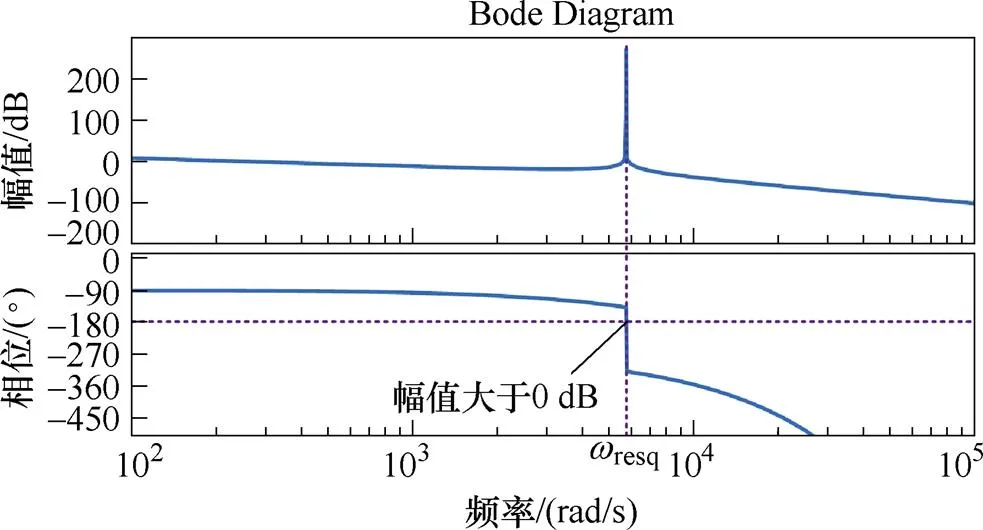
圖5 開環(huán)傳遞函數(shù)的Bode圖(Lq=2.05 mH, Lf =0.5 mH, Cf =75 mF, kp=3.7, ki=92.4)
2.2 基于CCFAD的諧振抑制策略
根據(jù)上述分析,為了保證IPMSM在帶有LC正弦波濾波器時(shí)可以穩(wěn)定運(yùn)行,在系統(tǒng)的電流調(diào)節(jié)器中加入基于電容電流的比例反饋環(huán)節(jié)作為系統(tǒng)的有源阻尼。所采用方法的總體控制結(jié)構(gòu)如圖6所示,其中為有源阻尼系數(shù)。

圖6 含有CCFAD的電流控制器架構(gòu)
諧振現(xiàn)象導(dǎo)致系統(tǒng)不穩(wěn)定的主要原因是開環(huán)傳遞函數(shù)在諧振頻率處的幅頻特性曲線遠(yuǎn)高于0 dB,可通過(guò)引入電容電流比例反饋來(lái)抑制。圖7展示了基于電容電流有源阻尼的電流調(diào)節(jié)器結(jié)構(gòu),相應(yīng)的開環(huán)傳遞函數(shù)為

圖7 含有CCFAD的q軸電流控制環(huán)


通過(guò)比較式(11)和式(13)的分母,后者明顯多了一個(gè)額外的3項(xiàng),其可以提供阻尼將不穩(wěn)定的極點(diǎn)移動(dòng)到虛軸的左半平面,從而保證系統(tǒng)的穩(wěn)定性。
圖8給出了式(13)中開環(huán)傳遞函數(shù)的Bode圖,其中所用的參數(shù)與圖5相同。從圖中可以看出,通過(guò)有源阻尼法可以很好地抑制諧振頻率附近的幅頻特性曲線。因此,可以通過(guò)選擇合適的有源阻尼系數(shù)以使系統(tǒng)避免急劇穿越-p線,從而保證系統(tǒng)的穩(wěn)定運(yùn)行。

圖8 含有CCFAD的q軸電流控制環(huán)的開環(huán)傳遞函數(shù)Bode圖
根據(jù)上述分析,CCFAD可以有效地抑制系統(tǒng)諧振現(xiàn)象,從而保證系統(tǒng)穩(wěn)定性。然而,在設(shè)計(jì)控制系統(tǒng)過(guò)程中,當(dāng)PI控制器參數(shù)與有源阻尼系數(shù)設(shè)置不當(dāng)時(shí),系統(tǒng)的諧振現(xiàn)象無(wú)法得到有效的抑制,控制系統(tǒng)的穩(wěn)定性也無(wú)法得到保證。
3 電流控制器諧振抑制參數(shù)設(shè)計(jì)
根據(jù)以上分析,對(duì)于含有CCFAD的電流控制器,需要合理設(shè)計(jì)控制器參數(shù)才能起到較好的諧振抑制效果。因此,需要對(duì)電流控制器參數(shù)設(shè)計(jì)進(jìn)行研究。為了更好地評(píng)估電流控制器性能與各參數(shù)之間的關(guān)系,本文進(jìn)行了一些近似變換來(lái)降低系統(tǒng)的復(fù)雜程度。
首先,引入Taylor展開式可以進(jìn)行如下近似變換:
當(dāng)系統(tǒng)頻率高于L=i/p時(shí),PI控制器中的積分作用很小,根據(jù)圖9所示的Bode圖,可以將此種情況下的PI控制器簡(jiǎn)化為p的形式。
圖9 PI控制器Bode圖
Fig.9 Bode plot of PI controller
圖7所示的控制系統(tǒng)開環(huán)傳遞函數(shù)在不同條件下的Bode圖如圖10所示。圖10a表明有源阻尼系數(shù)僅在諧振頻率附近對(duì)頻率響應(yīng)有顯著影響。因此,在研究諧振頻率左側(cè)的系統(tǒng)頻率響應(yīng)時(shí)參數(shù)對(duì)系統(tǒng)的影響可以忽略。由圖10b可知,當(dāng)值不變,PI控制器p的增加會(huì)導(dǎo)致系統(tǒng)幅頻特性曲線上升,從而致使截止頻率不斷接近諧振頻率,最終使系統(tǒng)陷入失穩(wěn)狀態(tài)。圖10c表明實(shí)際系統(tǒng)與電感串聯(lián)系統(tǒng)在低于諧振頻率的頻段具有類似的幅頻特性曲線。當(dāng)控制系統(tǒng)帶有LC正弦波濾波器后,大于諧振頻率的諧波幅值被有效限制,因此dq軸電流主要由直流分量和小于諧振頻率的諧波分量組成。根據(jù)圖10c,對(duì)于dq軸電流所在的頻率范圍,簡(jiǎn)化后的電感f+q串聯(lián)系統(tǒng)與原系統(tǒng)具有相同的幅頻特性。

圖10 不同條件下系統(tǒng)開環(huán)傳遞函數(shù)Bode圖
因此,可以將原系統(tǒng)簡(jiǎn)化為電感串聯(lián)簡(jiǎn)化分析,控制系統(tǒng)控制結(jié)構(gòu)可簡(jiǎn)化為圖11所示的電感串聯(lián)模型的電流調(diào)節(jié)器結(jié)構(gòu)。此種情況下,PI控制器中的積分增益對(duì)高于L頻率范圍影響較小,為簡(jiǎn)化系統(tǒng)分析時(shí)PI控制器可以簡(jiǎn)化為p。此時(shí),系統(tǒng)的截止頻率可以表示為
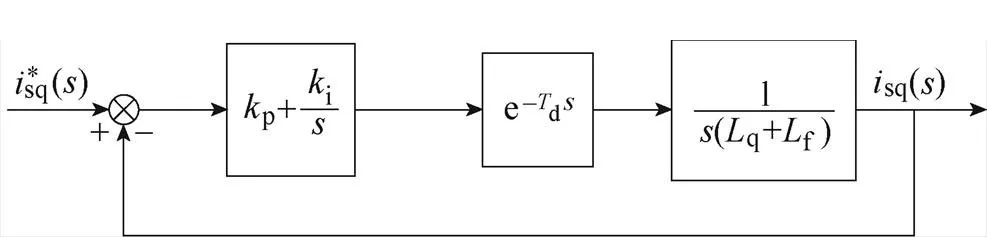
圖11 電感串聯(lián)模型的電流調(diào)節(jié)器結(jié)構(gòu)

在圖10c中,當(dāng)控制系統(tǒng)簡(jiǎn)化為電感f+q串聯(lián)系統(tǒng)時(shí),基于有源阻尼的控制系統(tǒng)與簡(jiǎn)化后的電感串聯(lián)系統(tǒng)的幅頻特性相同,但是原系統(tǒng)的相頻特性較簡(jiǎn)化的系統(tǒng),其相位滯后性隨著頻率的升高而變大,因此需要對(duì)兩者的相頻特性的差異化進(jìn)行處理。文獻(xiàn)[21]在忽略積分對(duì)高頻段影響的同時(shí)將系統(tǒng)的截止頻率作為諧振頻率resq的一部分(c=resq)并與系統(tǒng)阻尼因子共同建立了控制系統(tǒng)在截止頻率處的相位滯后的關(guān)系,通過(guò)調(diào)節(jié)p參數(shù)將系統(tǒng)的截止頻率設(shè)置為c=0.25resq可以兼顧電流調(diào)節(jié)器的響應(yīng)性能。PI控制器的積分增益i可以通過(guò)系統(tǒng)的相位裕度確定。圖11的系統(tǒng)開環(huán)傳遞函數(shù)為
當(dāng)系統(tǒng)設(shè)置合適的比例增益p后,相位裕度與積分增益i之間的關(guān)系可表示為

電容電流比例反饋增益與PI控制器的比例增益p相關(guān),因?yàn)槎呔绊懼C振頻率附近的頻率響應(yīng)。控制系統(tǒng)的閉環(huán)傳遞函數(shù)可以表示為

根據(jù)Routh穩(wěn)定性判據(jù),可以得出滿足式(20)時(shí)系統(tǒng)將保持穩(wěn)定,其可作為參數(shù)的下限值,即
在實(shí)際應(yīng)用中存在多種實(shí)際問(wèn)題會(huì)影響系統(tǒng)的穩(wěn)定性與性能。首先,實(shí)際系統(tǒng)的運(yùn)行是基于數(shù)字控制系統(tǒng)實(shí)現(xiàn)的,這會(huì)對(duì)系統(tǒng)的穩(wěn)定性和性能產(chǎn)生一定的影響。采用零階保持(Zero Order Hold, ZOH)變換將式(8)、式(9)轉(zhuǎn)化為離散域模型,即

式中,s為采樣周期。

在離散域下,含有CCFAD的q軸電流控制器的結(jié)構(gòu)框圖如圖12所示。
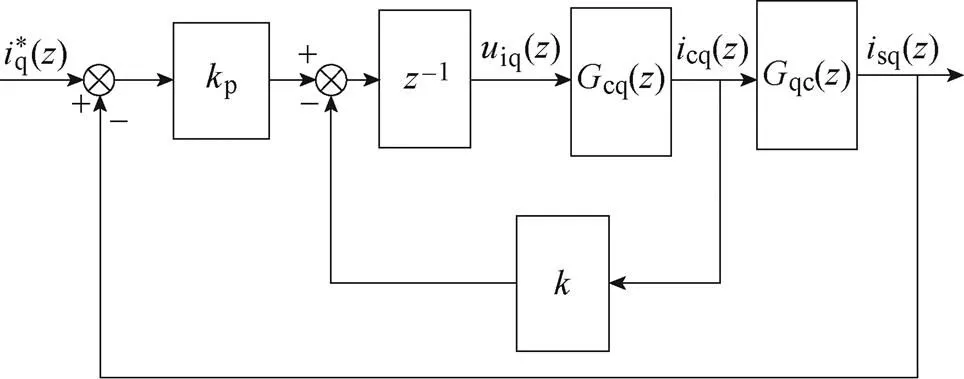
圖12 含有CCFAD的q軸電流控制器在z域的框圖
對(duì)于圖12中的控制系統(tǒng),閉環(huán)傳遞函數(shù)為

為了獲得系統(tǒng)關(guān)于參數(shù)的根軌跡,將其轉(zhuǎn)化為等效開環(huán)傳遞函數(shù),有
圖13給出了控制系統(tǒng)在不同p值下關(guān)于參數(shù)的根軌跡圖。可以看出,系統(tǒng)根軌跡進(jìn)入單位圓時(shí)的值近似等于式(20)得出的下限值結(jié)果。同時(shí),通過(guò)比較圖13a、圖13b和圖13c可以看出,隨著p的增加,系統(tǒng)根軌跡離開單位圓的極點(diǎn)將略微向著special的左側(cè)移動(dòng)。其中圖13a中的特殊極點(diǎn)special可以表示為
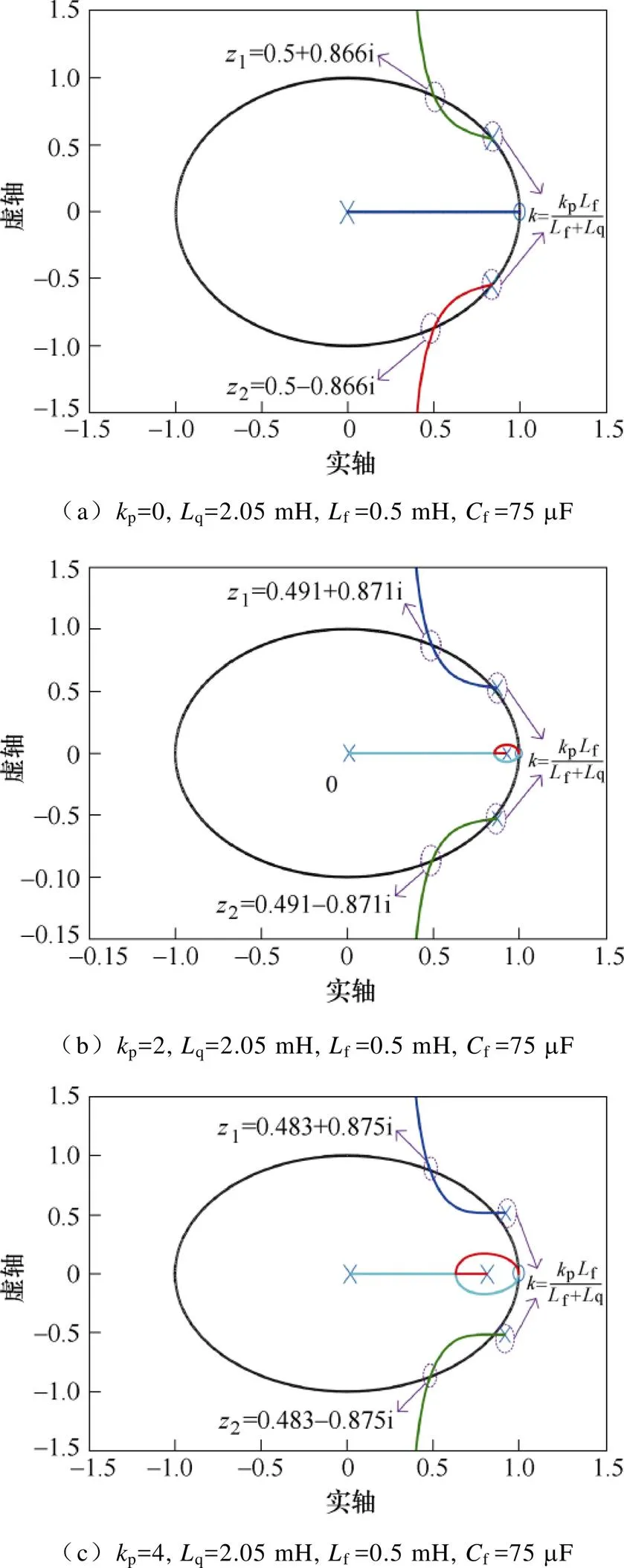
圖13 不同kp時(shí)有源阻尼系數(shù)k的根軌跡圖

圖13a中離開單位圓的特殊極點(diǎn)可以代入系統(tǒng)閉環(huán)傳遞函數(shù)的特征方程得到參數(shù)的另一個(gè)限制條件。因此可以得出結(jié)論,對(duì)應(yīng)于系統(tǒng)special極點(diǎn)的值將確保控制系統(tǒng)在不同的p條件的穩(wěn)定性。同時(shí)也表明,當(dāng)p=0時(shí),special點(diǎn)可以近似用來(lái)確定有源阻尼系數(shù)的另一個(gè)約束條件,因?yàn)殡S著p從0開始增大,離開單位圓的極點(diǎn)會(huì)出現(xiàn)在special的左側(cè),此時(shí)special點(diǎn)必然出現(xiàn)在單位圓內(nèi)部。
根據(jù)上述分析,參數(shù)的上限值可以通過(guò)將極點(diǎn)special代入系統(tǒng)的特征方程得到,結(jié)果為

在實(shí)際系統(tǒng)應(yīng)用中,可以在離線確定電流控制器中PI控制器p與i參數(shù)后,根據(jù)式(20)與式(26)進(jìn)一步確定有源阻尼增益參數(shù)的上、下限。式(26)形式較為復(fù)雜,但當(dāng)電流環(huán)p確定后,在已知的電機(jī)和濾波器參數(shù)下,可以采用離線計(jì)算的方式確定的上限值,無(wú)需采用數(shù)字處理器實(shí)時(shí)計(jì)算,因此,所提出的算法能夠?qū)嶋H應(yīng)用。
按照所提出的設(shè)計(jì)方法可以保證系統(tǒng)的穩(wěn)定性。將方法中的q用d替代,可以同樣得到d軸控制系統(tǒng)的參數(shù)整定結(jié)果。
4 實(shí)驗(yàn)驗(yàn)證
通過(guò)上述分析算法可以構(gòu)建基于有源阻尼的帶有LC濾波器內(nèi)置式永磁同步電機(jī)矢量控制系統(tǒng)框圖,如圖14所示。其中矢量控制所需要的轉(zhuǎn)子位置角通過(guò)編碼器獲得,ia、ib為測(cè)量的逆變器側(cè)電流,sa、sb為測(cè)量的電機(jī)側(cè)電流,e為電機(jī)轉(zhuǎn)子電角度。同時(shí),在實(shí)驗(yàn)中由于諧振所帶來(lái)的高電壓與大電流會(huì)對(duì)硬件電路產(chǎn)生損害,因此在諧振現(xiàn)象出現(xiàn)的瞬間會(huì)立即觸發(fā)過(guò)電壓、過(guò)電流保護(hù),實(shí)驗(yàn)中無(wú)法做出諧振效果圖。故本文采用仿真輔助實(shí)驗(yàn)的手段驗(yàn)證系統(tǒng)諧振現(xiàn)象以及本文所提參數(shù)設(shè)計(jì)對(duì)系統(tǒng)諧振抑制的有效性。
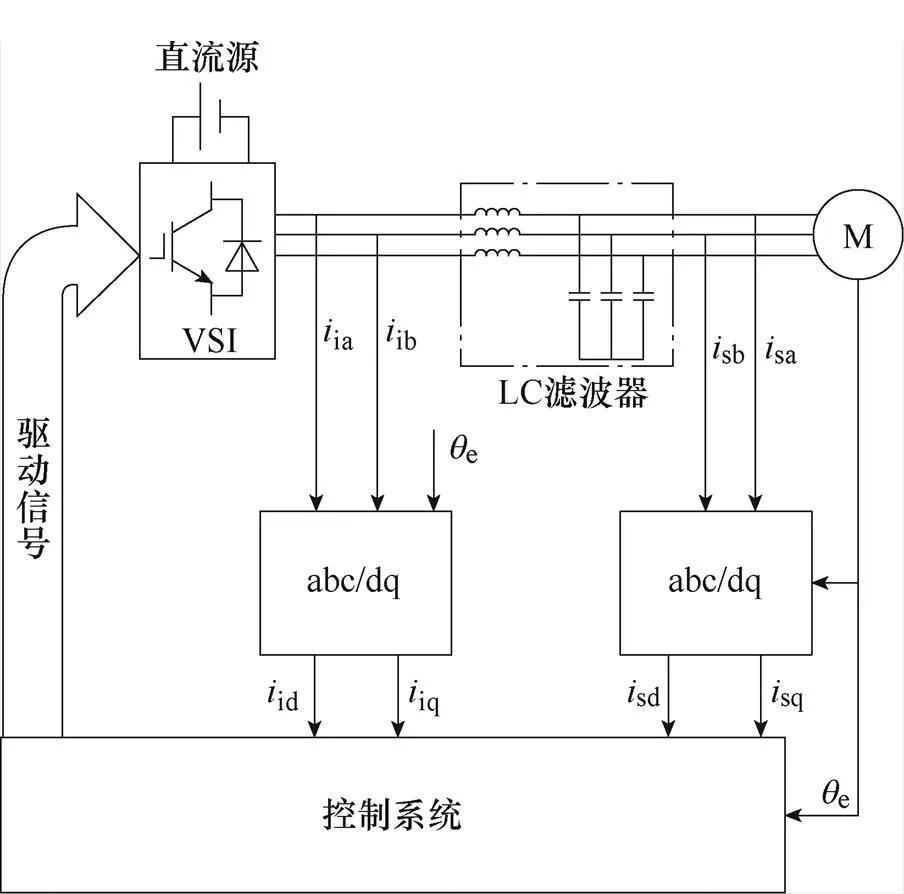
圖14 帶有LC濾波器的IPMSM控制系統(tǒng)框圖
IPMSM、LC正弦波濾波器和電流控制器參數(shù)見(jiàn)表1,其中PI控制器的參數(shù)通過(guò)式(15)和式(18)推導(dǎo)得到。此外,有源阻尼系數(shù)的取值范圍通過(guò)式(20)和式(26)得到。
實(shí)驗(yàn)是在由VSI供電的帶有LC濾波器IPMSM系統(tǒng)中實(shí)施,本文所提出的算法通過(guò)型號(hào)為TMS320F28377D的數(shù)字處理器實(shí)現(xiàn),系統(tǒng)主要參數(shù)設(shè)置見(jiàn)表1。
搭建的實(shí)驗(yàn)平臺(tái)如圖15所示,其中包括基于型號(hào)為TMS320F28377D的主控電路板、電壓源型逆變器、電流傳感器、IPMSM和LC濾波器。

表1 控制系統(tǒng)參數(shù)
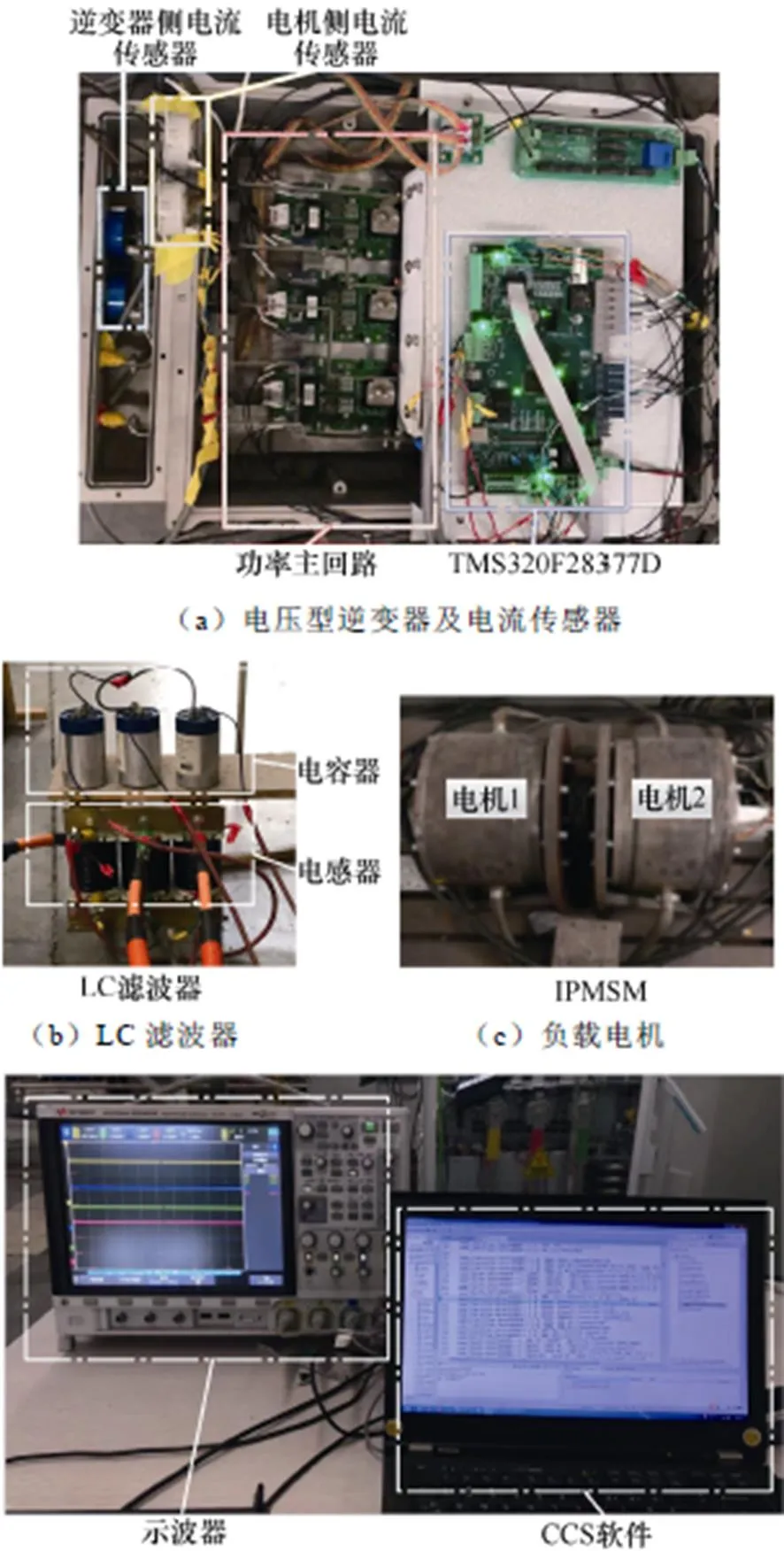
圖15 實(shí)驗(yàn)平臺(tái)
圖16和圖17給出了基于CCFAD的IPMSM控制系統(tǒng)的穩(wěn)態(tài)性能,其中展示了IPMSM帶67.5 N×m負(fù)載并且運(yùn)行于50 Hz和100 Hz時(shí)的逆變器側(cè)相電壓ia、電機(jī)側(cè)相電壓sa以及電機(jī)電流sa波形。

圖16 uia、usa和isa在fe=50 Hz時(shí)的波形
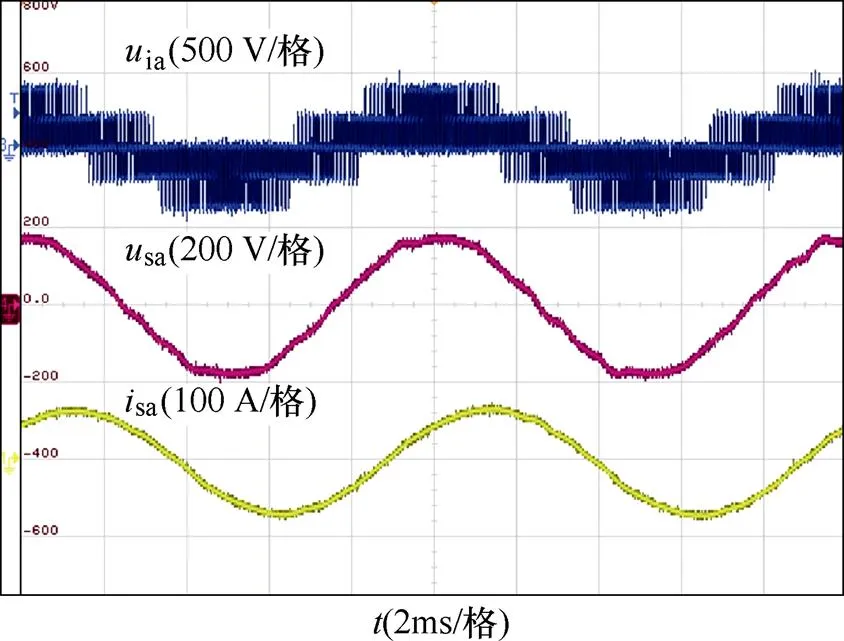
圖17 uia、usa和isa在fe=100 Hz時(shí)的波形
從圖16和圖17中可以看出,逆變器側(cè)電壓可以通過(guò)LC濾波器在電機(jī)端轉(zhuǎn)化為正弦波。PWM算法引起的電壓信號(hào)中的高d/d可以在不同的轉(zhuǎn)速下得到很好的抑制。
圖18~圖20給出了變轉(zhuǎn)速和變負(fù)載情況下的動(dòng)態(tài)實(shí)驗(yàn)結(jié)果。圖18和圖19展示了在電機(jī)運(yùn)行頻率為50 Hz與100 Hz時(shí)負(fù)載突變條件下的的電機(jī)運(yùn)行頻率e、兩相旋轉(zhuǎn)坐標(biāo)系下的電機(jī)定子電流sd、sq以及電機(jī)相電壓sa波形。圖18b、圖18c與圖19b、圖19c展示了波形的局部放大圖。
從圖18和圖19中可以看出,當(dāng)電機(jī)所帶負(fù)載突變時(shí)電機(jī)轉(zhuǎn)速可以跟隨參考值并且沒(méi)有振蕩現(xiàn)象。對(duì)于圖18,在負(fù)載轉(zhuǎn)矩突增時(shí),IPMSM運(yùn)行頻率跌落僅為7.53 Hz,且在30 ms以內(nèi)恢復(fù)穩(wěn)態(tài),在負(fù)載轉(zhuǎn)矩突減時(shí),IPMSM運(yùn)行頻率上升約6.71 Hz,且同樣在30 ms以內(nèi)恢復(fù)穩(wěn)態(tài)。對(duì)于圖19,在負(fù)載轉(zhuǎn)矩突增時(shí),IPMSM運(yùn)行頻率跌落僅為7.97 Hz,且在30 ms以內(nèi)恢復(fù)穩(wěn)態(tài),在負(fù)載轉(zhuǎn)矩突減時(shí),IPMSM運(yùn)行頻率上升約7.86 Hz,且同樣在30 ms以內(nèi)恢復(fù)穩(wěn)態(tài)。動(dòng)態(tài)過(guò)程中,電機(jī)的d、q軸電流響應(yīng)迅速且平穩(wěn),此時(shí)電機(jī)獲得了良好的動(dòng)態(tài)性能。在整個(gè)動(dòng)態(tài)過(guò)程中,電機(jī)相電壓可以很好地被轉(zhuǎn)化為正弦波。
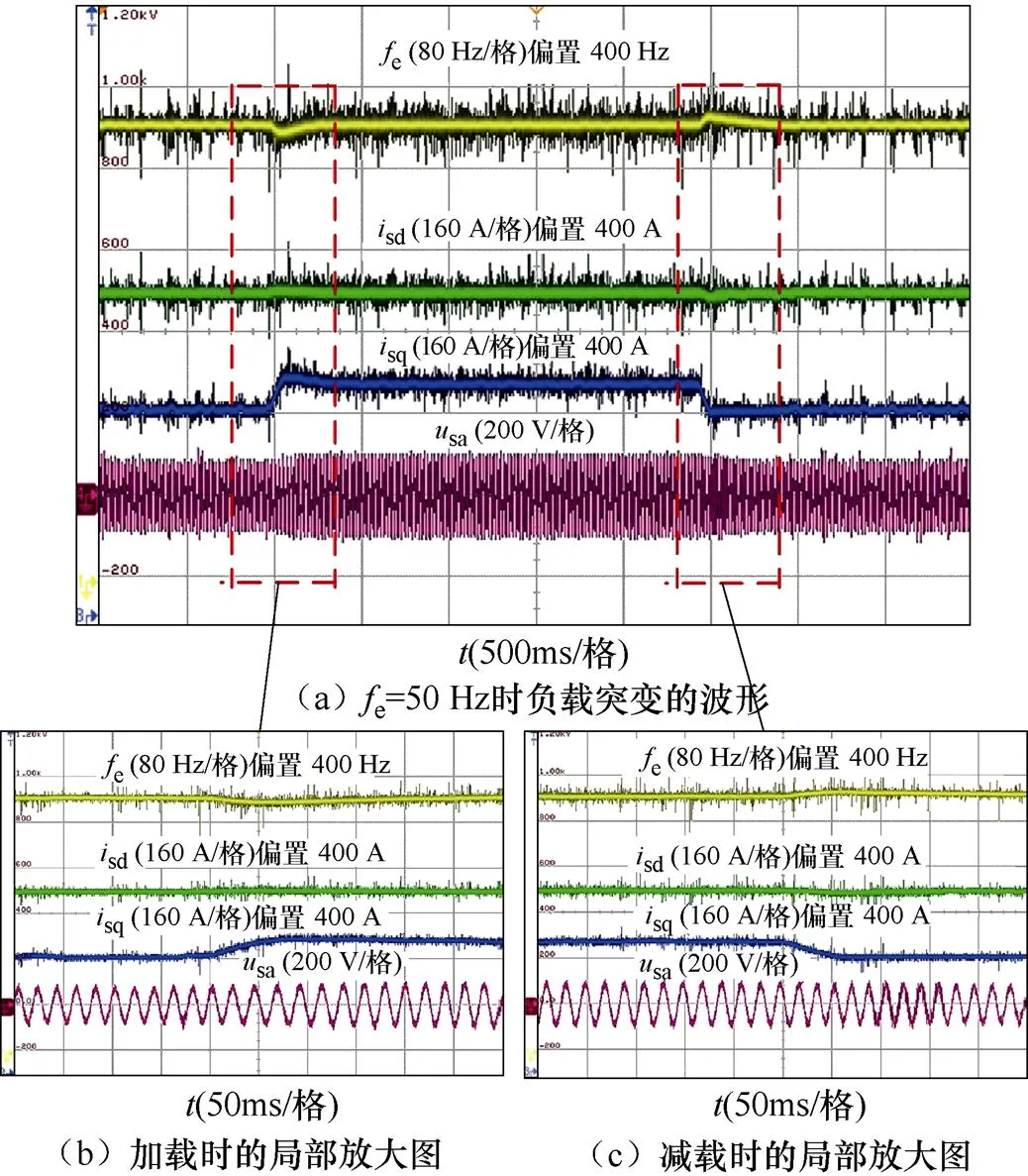
圖18 fe、isd、isq和usa在fe=50 Hz時(shí)負(fù)載突變的波形
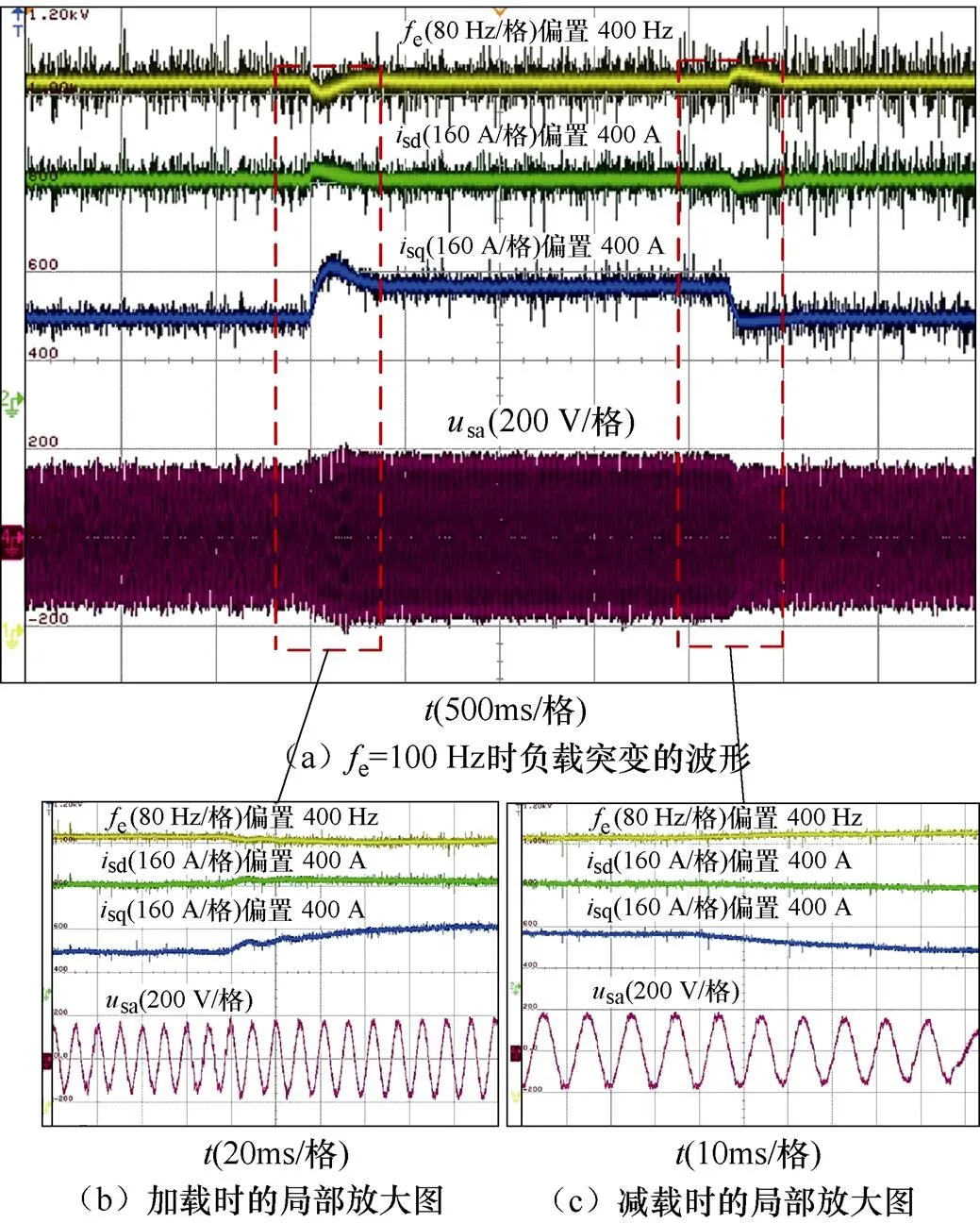
圖19 fe、isd、isq和usa在fe=100 Hz時(shí)負(fù)載突變的波形

圖20 fe、isd、isq和usa在改變轉(zhuǎn)速時(shí)的波形
圖20展示了起動(dòng)過(guò)程中的e、d、q軸電流以及相電壓波形。電機(jī)e從0 Hz加速到50 Hz再加速到100 Hz。圖20b與圖20c展示了波形的局部放大圖。
從圖20中可以看出,當(dāng)電機(jī)處于起動(dòng)過(guò)程中時(shí),e和d、q軸電流可以獲得很好的跟隨性能,并且此時(shí)的電機(jī)相電壓也保持正弦波形。
圖21展示了IPMSM帶67.5 N·m負(fù)載并且運(yùn)行于50 Hz時(shí)的電機(jī)定子dq軸電流sd、sq以及電機(jī)定子A相電流sa波形。從圖21中可以看出,在保持電流環(huán)PI控制器參數(shù)不變的情況下,有源阻尼系數(shù)先設(shè)置為邊界值范圍內(nèi)的合適值,此時(shí)電機(jī)帶載運(yùn)行狀態(tài)較好。然而,在正常運(yùn)行過(guò)程中突然將有源阻尼系數(shù)設(shè)置為低于下限值時(shí),電機(jī)定子電流立即出現(xiàn)振蕩現(xiàn)象,且在振蕩發(fā)生的20 ms內(nèi)迅速觸發(fā)系統(tǒng)的過(guò)電流保護(hù),電機(jī)立即停止運(yùn)行。
圖22展示了電機(jī)帶載且正常運(yùn)行時(shí),系統(tǒng)突然將有源阻尼系數(shù)設(shè)置為高于上限值時(shí),電機(jī)定子電流中同樣會(huì)出現(xiàn)振蕩現(xiàn)象,并且呈現(xiàn)失控運(yùn)行的狀態(tài),此時(shí)的電機(jī)無(wú)法正常運(yùn)行。

圖21 isd、isq和isa在減小k值時(shí)的波形
通過(guò)圖21與圖22效果圖可以看出,當(dāng)參數(shù)設(shè)計(jì)不滿足論文提出的分析方法時(shí),電機(jī)控制系統(tǒng)均會(huì)產(chǎn)生明顯的振蕩現(xiàn)象,影響電機(jī)的運(yùn)行工作,最終使系統(tǒng)失去穩(wěn)定運(yùn)行狀態(tài)。
因此通過(guò)在不同條件下的實(shí)驗(yàn)結(jié)果可以證明所提出電流控制器諧振抑制參數(shù)設(shè)計(jì)的有效性,采用本文所研究的諧振抑制參數(shù)設(shè)計(jì)方法可以使得帶有LC正弦波濾波器的IPMSM具備優(yōu)異的穩(wěn)、動(dòng)態(tài)調(diào)速性能。
5 結(jié)論
本文針對(duì)帶有LC正弦波濾波器的IPMSM采用矢量控制時(shí)的諧振現(xiàn)象進(jìn)行了分析,并且研究了含有CCFAD的電流控制器參數(shù)對(duì)系統(tǒng)諧振現(xiàn)象的影響。在此基礎(chǔ)上,研究了電流控制器諧振抑制參數(shù)設(shè)計(jì)方法,實(shí)驗(yàn)結(jié)果表明采用所提出的參數(shù)設(shè)計(jì)方法能使得IPMSM驅(qū)動(dòng)系統(tǒng)能獲得優(yōu)異的穩(wěn)態(tài)與動(dòng)態(tài)性能。

圖22 isd、isq和isa在增大k值時(shí)的波形
[1] 鞠孝偉, 程遠(yuǎn), 楊明亮, 等. SiC逆變器高頻脈沖電壓對(duì)Hairpin繞組絕緣安全的影響分析[J]. 電工技術(shù)學(xué)報(bào), 2021, 36(24): 5115-5124.
Ju Xiaowei, Cheng Yuan, Yang Mingliang, et al. Influence analysis of high frequency pulse voltage of SiC inverter on insulation safety of hairpin winding[J]. Transactions of China Electrotechnical Society, 2021, 36(24): 5115-5124.
[2] 趙方偉, 王秀和, 趙文良, 等. 內(nèi)置式永磁同步電機(jī)動(dòng)態(tài)偏心故障下的軸電壓解析分析和削弱[J]. 電工技術(shù)學(xué)報(bào), 2022, 37(4): 837-848.
Zhao Fangwei, Wang Xiuhe, Zhao Wenliang, et al. Analysis and reduction of shaft voltage in interior permanent magnet synchronous motors under dynamic eccentricity fault[J]. Transactions of China Electrotechnical Society, 2022, 37(4): 837-848.
[3] 段卓琳, 張棟, 范濤. SiC電機(jī)驅(qū)動(dòng)系統(tǒng)傳導(dǎo)電磁干擾建模及預(yù)測(cè)[J]. 電工技術(shù)學(xué)報(bào), 2020, 35(22): 4726-4738.
Duan Zhuolin, Zhang Dong, Fan Tao. Modeling and prediction of electromagnetic interference in SiC motor drive systems[J]. Transactions of China Electrotechnical Society, 2020, 35(22): 4726-4738.
[4] Ganjavi A, Zare F, Kumar D, et al. Mathematical model of common-mode sources in long-cable-fed adjustable speed drives[J]. IEEE Transactions on Industry Applications, 2022, 58(2): 2013-2028.
[5] 姜艷姝, 于曉洋, 齊路路. 基于PWM長(zhǎng)線驅(qū)動(dòng)系統(tǒng)模型的變頻器輸出端RLC濾波器設(shè)計(jì)[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2010, 30(36): 93-97.
Jiang Yanshu, Yu Xiaoyang, Qi Lulu. Design of inverter output RLC filter based on the model of PWM long drive system[J]. Proceedings of the CSEE, 2010, 30(36): 93-97.
[6] Velander E, Bohlin G, Sandberg ?, et al. An ultralow loss inductorless d/dfilter concept for medium- power voltage source motor drive converters with SiC devices[J]. IEEE Transactions on Power Electronics, 2018, 33(7): 6072-6081.
[7] 高強(qiáng), 徐殿國(guó). PWM逆變器輸出端共模與差模電壓d/d濾波器設(shè)計(jì)[J]. 電工技術(shù)學(xué)報(bào), 2007, 22(1): 79-84.
Gao Qiang, Xu Dianguo. Design of common-mode and differential-mode voltage d/dfilter at PWM inverter output terminals[J]. Transactions of China Electrotechnical Society, 2007, 22(1): 79-84.
[8] 劉學(xué)忠, 徐傳驤. PWM變頻調(diào)速電動(dòng)機(jī)端子上過(guò)電壓的抑制[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2001, 21(8): 84-88.
Liu Xuezhong, Xu Chuanxiang. Suppression of overvoltage acting on the terminal of PWM inverter- fed motor[J]. Proceedings of the CSEE, 2001, 21(8): 84-88.
[9] 肖燁然, 邵俊波, 邱長(zhǎng)青. 基于正弦波濾波器的輪緣推進(jìn)永磁同步電機(jī)無(wú)速度傳感器控制[J]. 電網(wǎng)技術(shù), 2021, 45(9): 3618-3626.
Xiao Yeran, Shao Junbo, Qiu Changqing. Speed sensorless control of rim driven PMSM based on sine wave filter[J]. Power System Technology, 2021, 45(9): 3618-3626.
[10] 趙仁德, 趙斌, 徐海亮, 等. 帶LC濾波器的永磁同步電機(jī)控制系統(tǒng)及策略研究[J]. 電工技術(shù)學(xué)報(bào), 2019, 34(增刊1): 79-86.
Zhao Rende, Zhao Bin, Xu Hailiang, et al. Research on control method of permanent magnet synchronous motor with LC filter[J]. Transactions of China Elec- trotechnical Society, 2019, 34(S1): 79-86.
[11] Xue Cheng, Zhou Dehong, Li Yunwei. Finite-control- set model predictive control for three-level NPC inverter-fed PMSM drives with LC filter[J]. IEEE Transactions on Industrial Electronics, 2021, 68(12): 11980-11991.
[12] Piippo A, Salomaki J, Luomi J. Signal injection in sensorless PMSM drives equipped with inverter output filter[J]. IEEE Transactions on Industry Applications, 2008, 44(5): 1614-1620.
[13] Mishra P, Maheshwari R, Patil D. Stabilization of rotor flux-oriented control of induction motor with filter by active damping[J]. IEEE Transactions on Industrial Electronics, 2019, 66(12): 9173-9183.
[14] Mishra P, Maheshwari R. A simple feedforward approach to stabilize VSI-fed induction motor with filter in RFOC[J]. IEEE Transactions on Industrial Electronics, 2020, 67(12): 10191-10201.
[15] Hatua K, Jain A K, Banerjee D, et al. Active damping of output LC filter resonance for vector-controlled VSI-fed AC motor drives[J]. IEEE Transactions on Industrial Electronics, 2012, 59(1): 334-342.
[16] Geng Weiwei, Zhang Zhuoran, Li Qiang. Analysis and experimental verification of a conventional inverter with output LC filter to drive ironless stator axial-flux PM motor[J]. IEEE Transactions on Transportation Electrification, 2021, 7(4): 2600-2610.
[17] Yao Yu, Huang Yunkai, Peng Fei, et al. Dynamic- decoupled active damping control method for improving current transient behavior of LCL- equipped high-speed PMSMs[J]. IEEE Transactions on Power Electronics, 2022, 37(3): 3259-3271.
[18] Walz S, Liserre M. Hysteresis model predictive current control for PMSM with LC filter considering different error shapes[J]. IEEE Open Journal of Power Electronics, 2020, 1: 190-197.
[19] Yang Ming, Lü Zekai, Xu Donglin, et al. Resonance suppression and EMI reduction of GaN-based motor drive with sine wave filter[J]. IEEE Transactions on Industry Applications, 2020, 56(3): 2741-2751.
[20] 陳希有, 顏斌, 徐殿國(guó), 等. 變頻器輸出濾波器的模糊優(yōu)化設(shè)計(jì)[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2003, 23(8): 71-75.
Chen Xiyou, Yan Bin, Xu Dianguo, et al. Fuzzy optimization of inverter output filter in motor drive system[J]. Proceedings of the CSEE, 2003, 23(8): 71-75.
[21] Tang Yi, Loh P C, Wang Peng, et al. Exploring inherent damping characteristic of LCL-filters for three-phase grid-connected voltage source inverters[J]. IEEE Transactions on Power Electronics, 2012, 27(3): 1433-1443.
Parameter Design of the Current Controller for Interior Permanent Magnet Synchronous Motor with LC Sinusoidal Filter to Suppress Resonance
11121
(1. School of Electrical Engineering China University of Mining and Technology Xuzhou 221008 China 2. Institute of Rail Transit Tongji University Shanghai 200092 China)
An interior permanent magnet synchronous motor (IPMSM) is usually powered by a voltage source inverter (VSI). The fast switching action of power switching devices leads to a large voltage change rate (d/d), which brings about adverse effects that cannot be ignored, such as the increase of insulation stress of the motor, the induction of shaft voltage and shaft current, and the generation of prominent electromagnetic interference. In some particular industrial application scenarios, such as marine surveys, oil field drilling, and mining, the VSI installation location is far away from the IPMSM, and the “l(fā)ong-line effect” makes such adverse effects more prominent. LC sinusoidal filter can convert VSI output voltage into a sine wave, which applies to any cable length and can effectively solve the above problems. However, adding an LC sine wave filter increases the order of the system model. It will produce an inherent resonance phenomenon in the current loop, which poses a challenge to the current controller design of IPMSM.
With the flux-oriented control, resonance suppression can be achieved theoretically by introducing active damping (AD) into the current controller. When the AD is introduced into the IPMSM current controller with an LC sinusoidal filter, the setting of proportional-integral (PI) control parameters and AD coefficient used in the current loop is critical to the stability of the system. However, there are few research results on the resonance suppression parameter design of AC motor current controllers with LC sinusoidal filters. The PI controller parameters, AD coefficient, IPMSM parameters, and LC sinusoidal filter parameters are coupled. If the controller parameters are set unreasonably, the resonance phenomenon of the system will not be effectively suppressed, which will lead to high voltage and current in the drive system and bring great risks to the operation of the system.
In order to obtain a satisfactory resonance suppression effect and guarantee the control performance of the IPMSM with an LC sinusoidal filter, the parameters of the current controller must be reasonably designed. This paper studies the design method of resonance suppression parameters of the current controller for IPMSM with an LC sinusoidal filter and analyzes the frequency characteristics of the current controller with capacitor- current- feedback AD (CCFAD). In addition, the influence mechanism of the current proportional integral regulator, AD coefficient, LC filter parameters, and motor parameters on the system resonance phenomenon is analyzed through the stability criterion in the frequency domain. The design method of resonance suppression parameters of the current controller is accordingly given by the mathematical models in the s and zdomains. The experimental results show that using the proposed parameter design method, the IPMSM drive system can obtain excellent steady-state and dynamic performance.
The paper is organized as follows. The mathematical model of the IPMSM with LC sinusoidal filter is given, the resonance phenomenon and resonance suppression strategy based on CCFAD are analyzed, and the design method of the resonance suppression parameters of the current controller is proposed.
LC sinusoidal filter, interior permanent magnet synchronous motor, proportional integral controller, active damping
吳 翔 男,1990年生,博士,講師,研究方向?yàn)殡娏﹄娮优c電力傳動(dòng)。E-mail: wux@cumt.edu.cn(通信作者)
李 超 男,1996年生,碩士研究生,研究方向?yàn)橛来磐诫姍C(jī)控制。E-mail: ts20130118p31@cumt.edu.cn
TM351
10.19595/j.cnki.1000-6753.tces.221734
江蘇省自然科學(xué)基金(BK20200652)和國(guó)家自然科學(xué)基金(52007190)資助項(xiàng)目。
2022-09-12
2022-11-23
(編輯 郭麗軍)
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
