輪腿式可變形車輪設計及整車控制研究
2023-11-28 10:30:13耿雪晴吳孟武華林
中國機械工程 2023年12期
耿雪晴 吳孟武 華林

摘要:針對當前復雜地形與路況對整車機動性及越障能力的需求,設計了一種輪腿式可變形車輪結構,該車輪結構可在不同地形與路況下進行輪式與腿式的狀態轉換。介紹了可變形車輪的設計原理并對結構參數進行了計算與優化,分析得到了輪腿式可變形車輪最大變徑比。設計了一套簡單有效的輪腿式可變形車輪智能變形控制系統,并據此開展整車布局設計,分析整車運動過程。制作并搭建了樣車平臺,通過實驗測試了整車的機動性與越障能力。結果表明該變形車輪可在輪式與腿式狀態下快速智能轉換,使得整車系統可同時在結構化與非結構化路面穩定行駛,具有較高的機動性與越障能力。
關鍵詞:可變形車輪;最大變徑比;智能轉換;整車控制
中圖分類號:TH122
DOI:10.3969/j.issn.1004-132X.2023.12.007
Study on Design of Wheel-leg Deformable Wheel and Vehicle Control
GENG Xueqing WU Mengwu HUA Lin1,2
Abstract: In view of the demands of vehicle mobility and obstacle-crossing ability in complex terrain and road conditions, a deformable wheel structure was designed with the characteristics of switching between wheeled and legged states under different terrain and road conditions. The design principle of the deformable wheel was introduced and the structural parameters were calculated and optimized, the maximum diameter ratio of the wheel-leg deformable wheel was obtained. A set of simple and effective wheel-leg deformation control system was also designed. And then the vehicle layout design and movement process analysis was carried out. Finally, a prototype vehicle platform was made to verify the mobility and obstacle-crossing ability by physical experiments. The results show that the deformable wheel may be quickly and intelligently switched between wheeled and legged types, which enables the vehicle to run stably on both structured and unstructured roads, resulting in a high mobility and obstacle-crossing ability of the vehicle system.
Key words: deformable wheel; maximum diameter ratio; intelligently switch; vehicle control
0 引言
結構化路面一般是指背景單一的城市干道或高速公路,而類似山石地形、沙坑泥濘路面等無法預估且多變的路面則稱為非結構化路面[1]。現有車輛通常采用輪式車輪或履帶式車輪,其中輪式車輪多適用于結構化路面,行駛速度快且平順性好,但難以穿越復雜地形與路面;而履帶式車輪多行駛于山石地形,具有高機動性,但越障能力不足,且速度與平順性較差。因此,當前車輛難以同時滿足快速、高機動性與越障能力強、平順性好等要求。而在軍事偵察或自然災害(如泥石流、地震等)救災搶險場景中,車輛通常面臨復雜的地形與路況[2-3]。隨著機構學與控制技術的不斷發展,可變形車輪的概念應運而生。與傳統結構形式的車輪不同,可變形車輪可以在不同地形與路面上進行狀態轉換,而裝載有這種可變形車輪的整車綜合性能如機動性與越障能力等得到大幅提高,因此可變形車輪及其整車的設計與控制成為當前國內外的研究熱點[4-6]。
已有研究中將可變形車輪分為多種類型,按復合方式可分為足履復合式、輪履復合式、輪足復合式;按外形結構則分為固定結構異形車輪及動態變形車輪[7]。國外對可變形車輪的研究較早,如以色列埃爾比特系統公司的“VIPER”輪履復合式變形車輪,其履帶可變形收縮成三角形,便于穿越山石地形[8];日本東京工業大學的“Roller-Walker”輪足復合式變形車輪在四條腿末端加裝被動輪用以實現輪式滾動或腿式移動,從而可在不同路面上行駛[9];日本大阪大學也提出了一種具備輪足兩種形態的變形車輪,通過重構將輪式轉變為足式[10];加拿大舍布魯克大學的“AZIMUT”足履復合式變形車輪采用搖桿式腿式設計并在每條腿上加裝履帶[11];日本千葉工業大學的“Quince”同樣采用的是足履式設計,將車輪設計成一種擺臂形式[12];而美國佐治亞理工學院則設計了“仿蜥蜴式”單片弧形結構異形車輪[13]。國內一些高校和研究機構也針對可變形車輪及其整車開展了相應研究,如孫鵬[14]研制的裝有輪履復合式變形車輪的森林巡防整車系統、范明聰等[15]研制的新型六輪腿機構、田潤等[16]研制的采用三根弧形輻條組成的輪腿式異形車輪、王書琦等[17]研制的“仿蜘蛛式”四足仿生車輪結構以及CHEN等[18]研制的TurboQuad系列變形車輪。
通過分析以上多種類型的可變形車輪可以看出,固定結構異形車輪如仿生式弧形結構車輪越障能力強且可以緩沖減振,然而由于其不具備完整輪形,在結構化路面上行駛時速度較慢、平順性較差,且當整車移動時,由于其輪式狀態不規則,容易發生失穩現象。在動態變形車輪中,輪履復合式車輪既具備了輪式的快速移動特性,也兼具了履帶的高機動性,但其越障能力有限,環境適應能力較差,且狀態切換比較復雜,難以在短時間內迅速切換;足履復合式車輪的穩定性好、越障能力優良但運行不夠靈活;而輪足復合式車輪具有優越的越障及環境適應能力,但已有研究中其結構形式復雜,控制不夠簡便,且當其切換為足式時,輪式通常不能收起,導致機構繁雜不便。因此,開展輪足復合式可變形車輪的結構設計及其整車控制研究具有重要的理論意義和實際應用前景[19]。
基于輪腿(足)式可變形車輪的優點,本文設計了一種可變形車輪結構,該車輪結構可以在輪式和腿式之間自由轉換,以同時適應結構化和非結構化路面。在可變形車輪結構參數計算與優化的基礎上,研究車輪自主變形觸發方式及其整車控制策略,制定整車布局方案。最后,制作并搭建實物樣車平臺,通過實驗驗證整車性能。
1 輪腿式可變形車輪結構設計與優化
輪腿式可變形車輪的結構設計是優化整車越障能力和運動穩定性的基礎及關鍵,對整車綜合性能如平順性、機動性及越障能力等具有重要的意義。
1.1 車輪結構設計
目前關于輪腿式可變形車輪的基本構型主要分為三類:曲柄連桿(或曲柄滑塊)型[20]、銷槽型[21]、四連桿型[22]。其中,銷槽型結構摩擦力大且變形不易,四連桿型的結構復雜,而曲柄連桿型的結構最為簡單有效。研究對心曲柄連桿機構構型發現,可以將滑塊的往返直線運動轉換為曲柄的回轉運動,圖1所示為對心曲柄連桿機構構型原理。曲柄在OA′C′與OAC之間做往復旋轉,通過連桿帶動滑塊在B′與B之間做往復運動。分析可知,改變滑塊位置可以改變車輪的狀態,使得車輪直徑發生變化,從而得到車輪腿式狀態下的等效直徑與圓輪狀態下直徑之比,即變徑比。而變徑比是衡量整車越障能力的重要指標。因此,本文最終選用對心曲柄連桿機構作為所要設計的可變形車輪的基本構型。
確定基本構型后,進行可變形車輪結構詳細設計。綜合考慮輪式與腿式結構狀態轉換的簡便性以及腿式車輪運動的平穩性,車輪在圓輪狀態下分為三段,對應腿式狀態下的三條輪腿。圖2所示為設計的輪腿式可變形車輪詳細結構,可以看出可變形車輪主要包括內輪輻、外輪輻、連桿、拉桿、輪腿五個部分,整體呈軸對稱形式。基于對心曲柄連桿構型,圖2中內輪輻即為構型中的曲柄部分,以連桿與輪腿連接點作為滑塊部分,并在外輪輻結構中設置直槽,使得滑塊在槽內往復直線運動,結合拉桿與輪腿的連接作用,通過旋轉內輪輻即可以實現車輪在輪式與腿式狀態之間的轉換。為了減小摩擦,提高可變形車輪狀態轉換的靈活性與可靠性,各部件之間采用鉸鏈連接形式,并在輪腿與連桿連接處加裝軸承,使得滑塊在直槽內往復運動更為靈活。同時為避免可變形車輪在狀態轉換過程中出現過度變形而造成車輪機構鎖死或干涉,在內輪輻輻條頂處設計了限位凸臺。
本文設計的輪腿式可變形車輪以圓輪狀態為源結構,圖3為可變形車輪結構變形前后示意圖,固定外輪輻不動,通過旋轉內輪輻使得內外輪輻發生相對轉動,并通過內輪輻的旋轉帶動連桿推動滑塊在外輪輻直槽內直線運動,輪腿另一側通過拉桿固定,最終切換成圖3b所示的腿式狀態。
1.2 車輪結構參數計算與優化
根據設計的可變形車輪結構,外輪輻直槽頂點位置不能超過車輪在圓輪狀態下的輪腿外緣面,且根據對心曲柄連桿構型原理,滑塊運動極限位置即為曲柄連桿處于一條直線上時連桿頂點處的位置,此時車輪輪腿可展開程度達到最大,也即此時輪腿式可變形車輪變徑比取得最大。圖3中,A(B)、B′(A′)、B″(A″)三點為內輪輻三個支點,C點為銷槽極限位置點,E、D兩點分別為單輪腿前后端點,E′、D′點為輪腿展開后端點,且D′點為輪腿展開最高點。可變形車輪結構在任何時候都呈軸對稱形式,三條輪腿是等效的,且同步變形,因此選取其中一個輪腿進行參數計算即可。
由式(6)可看出β達到最大值時,輪腿可展開至最大幅度,此時可變形車輪變徑比最大。由于拉桿E′F限制,β最大約為145°,由此計算式(4)中的變徑比λ可得最大變徑比約為1.8,表明該輪腿式可變形車輪展開后車輪等效直徑為圓輪的1.8倍,因此本文所設計的輪腿式可變形車輪具有優越的越障能力。
2 整車控制與布局
2.1 整車控制
為提高整車機動性及靈活性,并簡化輪腿式可變形車輪變形控制方式,需要設計一套變形觸發裝置控制車輪在輪式與腿式之間轉換。如圖4所示,整個觸發裝置主要由電機、驅動齒輪、鎖定軸、內輪輻聯軸器以及微型電磁離合器組成。當整車在結構化路面上行駛時,微型電磁離合器不通電吸合,外輪輻未鎖定,電機驅動齒輪帶動內輪輻轉動,外輪輻隨之同步轉動,內外輪輻不發生相對轉動,此時可變形車輪處于圓輪狀態;當整車處于非結構化路面,如遇到山石地形或者沙坑泥濘路面時,微型電磁離合器通電吸合,通過鎖定軸鎖定外輪輻,電機驅動齒輪帶動內輪輻轉動,內外輪輻發生相對轉動,當內輪輻轉過120°后,可變形車輪轉換為腿式狀態,此時驅動整車跨越障礙或其他復雜地形。這種觸發機制可以有效實現可變形車輪在輪式與腿式之間的轉換,且不增加額外驅動,簡化控制方式。
整車選用Robomaster C板作為電機控制器,Robomaster C板采用高性能STM32主控芯片,并選用M3508電機作為驅動電機,單電機的最大扭矩可達5 N·m,減速后額定轉速為469 r/min,持續扭矩可達2.8 N·m,符合整車運動特性要求。根據整車車輪分布式驅動需求,選用了C620電調,參考其原理,可變形車輪整車底層控制采用CAN總線技術。
圖5所示為輪腿式可變形車輪整車控制系統架構。根據設計的可變形車輪變形觸發裝置,需要加裝可以控制微型電磁離合器吸合的器件。結合可變形車輪智能自主變形的需求,選擇超聲波傳感器用以識別整車在行進過程中遇到的復雜地形或障礙物,進而將信號轉化為電信號傳遞給延時繼電器用以控制電磁離合器的吸合,從而自主判斷并完成車輪變形動作。圖6為超聲波傳感器探頭及其安裝位置示意圖,探頭安裝在車架前端位置,2個超聲波傳感器采集的信號分別用于控制左右兩邊車輪的變形。
2.2 整車布局
整車采用左右對稱式布局,前部裝有兩個輪腿式可變形車輪,兩后輪則采用普通結構圓輪,可以支撐整個車架部分。圖7所示即為前部裝有兩個輪腿式可變形車輪的整車系統,車架部分設計成前低中高后低的結構形式,提高了整車底盤的通過性。另外,車架部分多處挖空可以有效減小整車質量。
確定好整車的控制系統及布局后,分析輪腿式可變形車輪整車運動過程。圖8所示為整車遇到障礙后,通過智能控制執行車輪變形動作,車輪轉換為腿式后翻越障礙物的過程,整個過程可分為以下4個步驟:
(1)圓輪狀態車輪行駛到障礙物前一定距離,當此距離小于超聲波傳感器設定的距離時,超聲波傳感器發送電信號觸發車輪變形;
(2)微型電磁離合器吸合,通過鎖定軸鎖定外輪輻,此時驅動電機持續轉動引起內外輪輻的相對轉動,使得車輪由圓輪模式變換成輪腿模式;
(3)車輪變換到輪腿模式極限位置后,驅動電機繼續轉動,帶動變形輪往上攀爬,直至整車越過障礙物;
(4)車輪越過障礙物后,通過電機反轉,在整車自身重力作用下使車輪由輪腿模式轉變成圓輪模式,然后電機正轉繼續前行。
3 樣車搭建與實驗測試
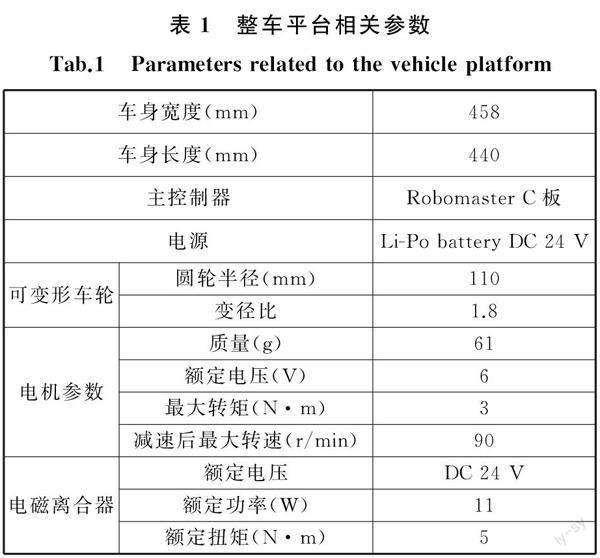
為使整車搭建更簡便靈活,同時不影響整車設計功能,樣車制作時采用了3D打印工藝加工完成主要部件,如車身、車架、兩后輪等。對于強度及配合精度要求較高的部件,如驅動軸、傳動軸、變形車輪以及齒輪等,則采用鋁合金材料機加工制作而成。整車模型運用CATIA三維軟件繪制如圖9所示,整車平臺相關參數詳見表1。樣車實驗主要對整車的設計功能和性能進行驗證,包括可變形車輪輪式與腿式狀態智能自主轉換的動作穩定性、響應時間以及整車的越障能力等。
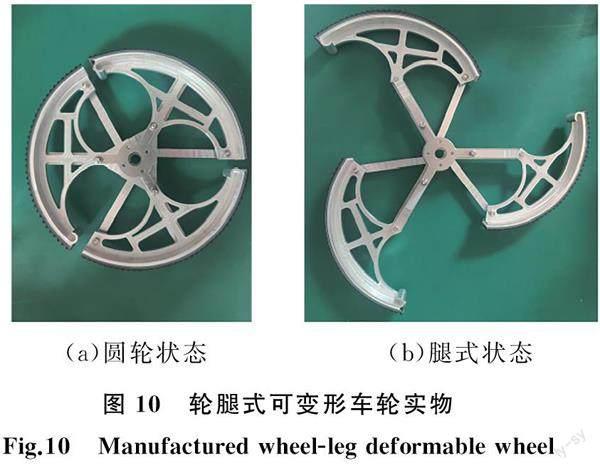
圖10為輪腿式可變形車輪實物圖,其中圖10a所示為可變形車輪的圓輪狀態,圖10b所示為可變形車輪的腿式狀態。將可變形車輪裝車后進行狀態轉換控制實驗,其變形過程與前述理論分析一致,實驗結果表明本文設計制作的輪腿式可變形車輪能夠靈活完成其主動變形,輪腿式狀態轉換可在1.5 s內完成。
整車越障實驗過程如圖11所示,可以直觀地反映整車越障能力。以距障礙物500 mm處作為
整車起始位置,對整車越障過程中整車移動距離、可變形車輪半徑變化及所對應的時間進行測算,并根據測算結果繪制出圖12。
結果顯示,整車整個越障過程耗時4 s,可分為以下四個階段:
(1)0~0.5 s,圓輪正常行駛及輪腿式觸發階段。整車上的超聲波傳感器檢測到車身與障礙物的距離在300 mm內時,信號傳遞給主控制器,觸發可變形車輪變形機制,開始進入輪腿式狀態轉換階段。
(2)0.5~1.5 s,變形階段。電機繼續旋轉,內外輪輻發生相對轉動,促使車輪持續變形,可變形車輪完成由輪式向輪腿式的轉換。
(3)1.5~3.0 s,越障階段。整車車輪在輪腿模式下,電機繼續旋轉,變形輪腿越過障礙物,繼而帶動整車越過障礙物。
(4)3.0~4.0 s,變形恢復階段。整車越過障礙物后,電機反轉,可變形車輪依靠整車自重由輪腿式恢復至輪式,然后電機正轉整車向前行駛。
上述實驗結果表明,基于本文設計的輪腿式可變形車輪智能變形控制系統,樣車在遇到障礙物后能夠快速觸發并完成可變形車輪的智能自主變形,然后帶動整車翻越障礙,大大提高整車的機動性與越障能力。
4 結語
本文設計了一種可變形車輪,該車輪結構簡單,能夠在輪式與腿式之間靈活轉換,可變形車輪最大變徑比可達1.8。同時設計了一套簡單有效的輪腿式可變形車輪智能變形控制系統,不需要增加額外驅動,能夠快速實現可變形車輪在輪式與腿式之間的智能自主轉換。實物樣車搭建與測試結果表明,可變形車輪能夠在1.5 s內靈活完成輪腿式狀態轉換,樣車在4 s內完成越障過程,機動性與越障能力較高。
鑒于本文所設計及制作的樣車僅兩前輪采用可變形車輪,兩后輪仍設計為普通圓輪形式,因此在越障高度上具有一定的局限性。后續將對樣車進行改進,整車四輪均加裝可變形車輪并采用不同高度的障礙物對樣車進行越障測試。此外,對于超高障礙物,后續將研究并加裝自動避障與轉向系統,以進一步提高整車在復雜地形與路況下的機動性及越障能力。
參考文獻:
[1]張禮華, 費藍冰, 樓飛,等. 新型輪腿式地面移動機器人的結構設計與運動特性分析[J].中國機械工程, 2015,26(21):2867-2872.
ZHANG Lihua, FEI Lanbing, LOU Fei. Structure Design and Analysis of Movement Characteristics for a New Type Wheel-legged UGV[J]. China Mechanical Engineering, 2015,26(21):2867-2872.
[2]王丹. 變形輪移動機器人的設計與研究[D].北京:北京交通大學,2016.
WANG Dan. Design and Research of Mobile Robots with Transformable Wheels[D]. Beijing:Beijing Jiaotong University, 2016.
[3]SHEY, HURD C? J, SU H J. A Transformable Wheel Robot with a Passive Leg[C]∥IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS). Hamburg, 2015:4165-4170.
[4]徐國華,譚民. 移動機器人的發展現狀及趨勢[J]. 機器人技術與應用,2001(3):7-14.
XU Guohua, TAN Min. Development Status and Trend of Mobile Robots[J]. Robot Technique and Application, 2001(3):7-14.
[5]李瑞峰, 李漢舟.地面可移動服務機器人發展現狀[J]. 導航與控制,2017,16(1):104-112.
LI Ruifeng, LI Hanzhou. Present Situation and Development of Ground Mobile Service Robot[J]. Navigation and Control, 2017,16(1):104-112.
[6]官漸. 輪腿式移動機器人主/被動變形機構設計及研究[D].重慶:重慶大學,2019.
GUAN Jian. Design and Research of Passive/Active Transformable Mechanism for Wheel-legged Mobile Robot[D].Chongqing:Chongqing University, 2019.
[7]GOVERS F X.? Elbit Tracks & Wheels VIPeR[J].Robot Magazine,2009,9:24-25.
[8]ENDO G, HIROSE S. Study on Roller-Walker-Energy Efficiency of Roller-Walk[C]∥IEEE International Conference on Robotics & Automation. Shanghai, 2011:12375476.
[9]HIROSE S. Variable Constraint Mechanism and Its Application for Design of Mobile Robots[J]. International Journal of Robotics Research, 1999,19(11):1126-1138.
[10]LI S, FENG C, NIU Y, et al. A Fire Reconnaissance Robot Based on SLAM Position, Thermal Imaging Technologies, and AR Display[J]. Sensors(Switzerland), 2019, 19(22):50-36.
[11]MICHAUD F, DOMINIC L, ARSENAULT M, et al. Multi-modal Locomotion Robotic Platform Using Leg-track-wheel Articulations[J]. Autonomous Robots, 2005, 18(2):137-156.
[12]YAMAUCHI Y, FUJIMOTO T, ISHII A, et al. A Robotic Thruster That Can Handle Hairy Flexible Cable of Serpentine Robots for Disaster Inspection[C]∥IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Auckland, 2018:107-113.
[13]GOLDMAN D, KOMSUOGLU? H, KODITSCHEK D. March of the Sandbots[J]. IEEE Spectrum, 2009, 46(4):30-35.
[14]孫鵬. 一種輪履復合式森林巡防機器人平臺的研究[D].哈爾濱:東北林業大學,2010.
SUN Peng. Research on a Wheel-track Composite Forest Patrol Robot Platform[D].Harbin:Northeast Forestry University,2010.
[15]范明聰, 吳月華, 許旻, 等.高機動性越障機器人運動學分析與軌跡控制研究[J].光學精密工程,2004,12(21):194-197.
FAN Mingcong, WU Yuehua, XU Min, et al. Kinematic Analysis and Path Control for a High Mobility Obstacle Crossing Robot[J]. Optics and
Precision Engineering,2004,12(21):194-197.
[16]田潤, 宋軼民, 孫濤, 等.一種新型輪腿式移動機器人的參數設計與實驗研究[J].機器人, 2015, 37(5):538-545.
TIAN Run, SONG Yimin, SUN Tao, et al. Parameter Design and Experiment of a Novel Wheel-legged Mobile Robot[J]. Robot, 2015, 37(5):538-545.
[17]王書琦. 輪足一體化四足仿生機器人研究[D]. 哈爾濱:哈爾濱理工大學, 2019.
WANG Suqi.Research on Four-legged Bionic Robot with Wheel-foot Integration[D]. Harbin :Harbin University of Science and Technology,2019.
[18]CHEN W, LIN H, LIN Y,et al, TurboQuad:a Novel Leg-wheel Transformable Robot with Smooth and Fast Behavioral Transitions[J].IEEE Transactions on Robotics, 2017, 33(5):1025-1040.
[19]羅洋, 李奇敏, 溫皓宇. 一種新型輪腿式機器人設計與分析[J]. 中國機械工程,2013,24(22):3018-3023.
LUO Yang, LI Qimin, WEN Haoyu. Design and Analysis of a New Kind of Wheel-legged Rover[J].China Mechanical Engineering, 2013, 24(22):3018-3023.
[20]SUN T, XIANG X, SU W, et al. A Transformable Wheel-legged Mobile Robot:Design, Analysis and Experiment[J]. Robotics and Autonomous Systems, 2017,98:30-41.
[21]KIM Y? S, JUNG G? P, KIM H, et al. Wheel Transformer:a Wheel-leg Hybrid Robot with Passive Transformable Wheels[J]. IEEE Transactions on Robotics, 2014, 30(6):1487-1498.
[22]WEI X? Z, YAO Y? A, TIAN Y B, et al. A New Method of Creating Expandable Structure for Spatial Objects[J]. Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2006, 220(12):1813-1818.
(編輯 王艷麗)
作者簡介:
耿雪晴,女,1998年生,碩士研究生。研究方向為現代汽車設計與制造。
吳孟武(通信作者),男,1984年生,副教授。研究方向為汽車輕量化設計與成形制造技術、汽車循環利用與再制造技術、特種制造與智能制造技術。E-mail:wumw@whut.edu.cn。
收稿日期:2022-05-08
基金項目:教育部創新團隊計劃(XDQCKF2021011);新能源汽車科學與關鍵技術學科創新引智基地項目(B17034)