重載鐵路過負荷保護誤動分析及對策分析
2023-11-28 11:31:14郝海峰
電力安全技術 2023年10期
關鍵詞:智能
郝海峰
(國能朔黃鐵路發展有限責任公司,河北 肅寧 062350)
0 引言
電氣化鐵路牽引變電所是牽引供電系統的一個重要節點,是為電力機車供電的核心設施。實際運行中,牽引變電所保護測控裝置常見的跳閘原因有過負荷[1-3]、金屬性接地短路、帶電過分相及高阻接地[4]等。隨著電氣化鐵路的發展,鐵路行車速度加快,機車密度加大,列車載貨量加大,導致機車牽引負荷急劇變化,供電線路的供電能力日趨緊張,過負荷跳閘問題日益突出[5]。目前現有技術中,一般牽引變電所采取的措施是投入反時限過負荷保護,其主要原理是利用反時限曲線,根據過負荷電流的大小調整跳閘時間,防止接觸網長時間大電流發熱,從而保證列車及接觸網安全。這種方式對于一般的行車密度不大、不涉及越區供電的普通鐵路線路,可以起到保護線路及機車安全的作用,但是過負荷時間達到定值后仍會跳閘,造成供電中斷。對于供電線路較長,列車行車密度較大或涉及越區供電的重載鐵路,現有主保護均為變電所饋線距離保護。實際應用中,若供電區間線路較長,用電列車過多,則線路最大負荷電流將接近甚至超過接觸網末端短路電流,導致既有牽引供電系統繼電保護功能無法準確區分過負荷電流與接觸網末端短路電流,造成列車正常運行時不必要的過負荷誤跳閘,從而對行車安全和整個線路產生不利影響,亟需盡快改進完善。
因此,針對重載鐵路因無法區分越區供電、行車密度大時的末端短路電流及過負荷電流導致的弊端,基于現有成熟通信技術及朔黃鐵路接觸網光纖復合保護線,通過供電臂不同變電所間智能保護裝置的數據交互,完成機車負荷與短路情況的判別,進而調整牽引變電所過負荷保護定值,確保過負荷保護不誤動,達到牽引供電系統接觸網安全供電的目的。
1 既有過負荷保護功能缺陷與隱患
朔黃重載鐵路正線總長近598 km,設計年運輸能力為近期3.5 億t (2013 年),遠期4.5 億t。一般情況下,2 萬t 級單臺電力機車負荷電流約為700 A[6]。對于常規的長度為45 km 的供電臂,在列車追蹤時間較短的情況下,同時存在的列車數量可能超過3 臺;或者在越區供電情況下,同一供電區間的列車數量也可能超過3 臺。3 臺機車的負荷電流最大可達2 100 A,已經超過接觸網末端短路電流。
因此,牽引變電所饋線繼電保護裝置將無法區分運行大電流是由過負荷引起還是由接觸網末端短路引起,對線路安全造成隱患。具體產生的安全隱患有以下三個方面。
1) 重載線路的牽引變壓器容量較大,線路末端短路時,線路短路電流很大,但由于繼電保護裝置無法區分此大電流是過負荷電流還是短路電流,故其跳閘時間不能確定,因此,會對線路及設備產生較長時間的沖擊。
2) 若線路已經處于過負荷狀態,此時牽引變電所饋線保護裝置檢測到的電流接近甚至超過短路電流,若饋線保護裝置根據過電流保護原理立刻跳閘,則會影響線路的負載能力,不利于應急狀態及正常運行時的負荷調配。
3) 現有過負荷保護沒有統一的時限及安全預警功能,只是單純的根據過負荷電流的大小,通過反時限方程計算出跳閘時間,這對于日益發展的重載鐵路技術,已顯得落后而僵化,難以與我國正在建設的智能牽引供電系統相適應。
2 解決方案與對策分析
國能朔黃鐵路發展有限公司正在逐步對朔黃、黃萬等重載鐵路進行改造,配置接觸網光纖復合保護線用于接地回流及區間所亭之間的互通信,并在牽引變電所亭內配置智能裝置用于廣域保護。智能保護裝置能夠基于IEC 61850 標準實現相鄰變電所裝置之間的相互通信與信息交互,通信結構如圖1所示。
圖1 所示智能保護裝置內包含有數據收集模塊、數據處理模塊、數據反饋模塊和儲存模塊等。各模塊需要完成的主要功能如下。
1) 數據收集模塊:收集本變電所及本供電臂中AT 所、分區所所有饋線實時負荷數據。
2) 數據處理模塊:基于數據收集模塊收集的負荷數據,分析本供電臂上的列車數量及負荷情況。
3) 數據反饋模塊:將處理完成的數據實時發送至本供電臂牽引變電所內智能裝置及相鄰供電臂牽引變電所的智能裝置,各所智能裝置將相關數據同時上傳至本所的監控主機,再由監控主機將數據下發至變電所內各保護裝置,各保護裝置能對本供電臂饋線保護過負荷及過電流類保護定值進行調整,進而對保護跳閘出口進行控制,減小誤跳對電氣化鐵路安全供電造成的影響。
4) 儲存模塊:儲存本供電臂上牽引變電所及所有AT 所、分區所的各種當前數據、歷史數據,同時儲存相鄰牽引變電所供電臂相關數據,便于后續查詢及追溯,并通過對存儲負荷變化趨勢的分析,有效指導檢修及列車運行圖的調整。
牽引變電所兩側的AT 所、分區所智能裝置通過數據收集模塊收集負荷電流相關數據后,采用IEC 61850 數據傳輸協議,使用光纖復合保護線廣域網絡通道,傳輸給牽引變電所智能裝置。牽引變電所內智能裝置的數據處理模塊,將本所及兩側AT 所、分區所智能裝置數據收集模塊上傳的相關數據進行分析與計算,實時分析當前時刻本供電臂的負荷情況,以及所轄供電臂的負荷變化情況。對突增的電流量,需要判斷該電流變化來源于機車從本供電臂運行至下個供電臂,還是來源于本供電臂末端發生接觸網短路故障。牽引變電所內智能裝置的數據反饋模塊將已處理的數據發送給牽引變電所監控主機,再由監控主機將相關數據信息實時發送給變壓器后備保護裝置和饋線保護裝置,并對牽引變電所所內這兩類裝置的過負荷保護定值進行實時調整,從而達到判別過負荷電流和末端短路電流的目的,使保護既具有選擇性,也更加靈敏靈活。負荷狀態判斷流程如圖2 所示。
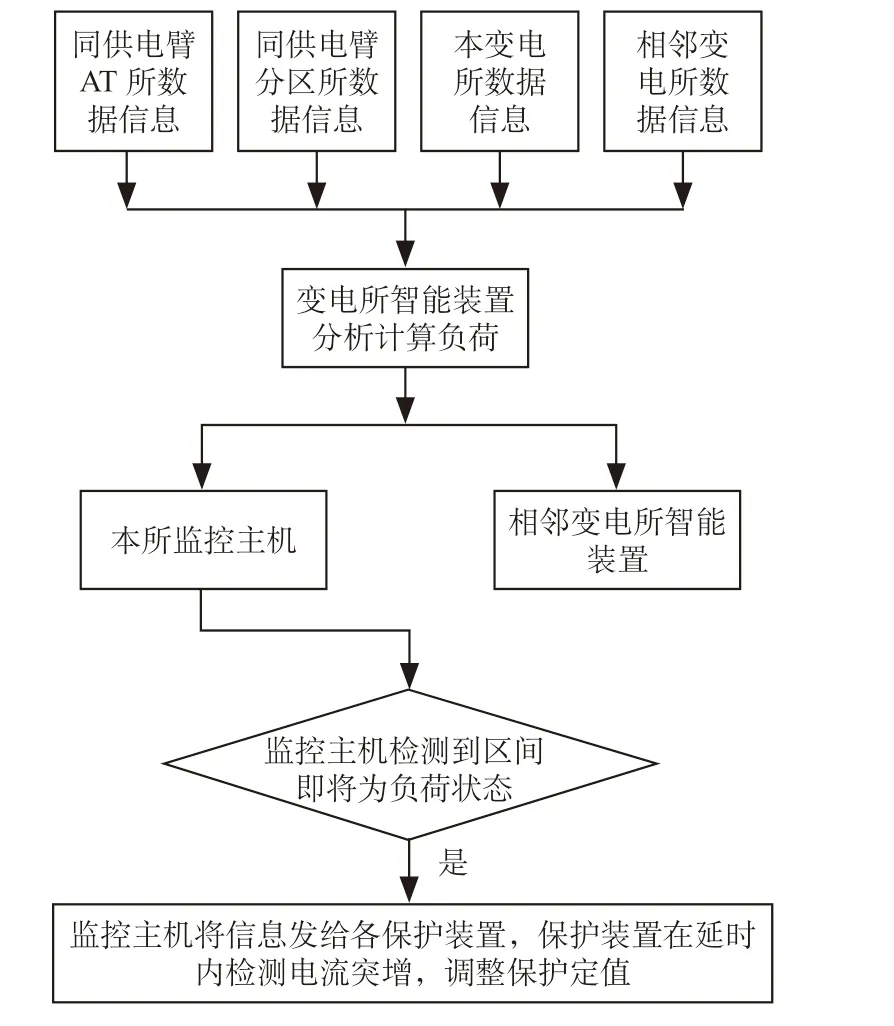
圖2 負荷狀態判斷流程
數據處理模塊在具體應用中,如果線路末端發生短路故障時,其電流在供電臂呈現突增趨勢,而對相鄰供電臂上各所無影響(牽引供電系統分相設置的原因);而過負荷時的電流突增,則會隨著機車前行在各區間依次產生。雖然都伴隨著電流突增,但兩者成因是不一樣的。因此,只要收集兩相鄰供電臂的負荷情況,通過負荷數據分析出機車的運行方向及運行速度,從而計算出機車運行至本供電臂的時間,與電流突增時間進行比較,即可判別出是線路過負荷還是短路。由于同一供電臂上牽引變電所、AT 所、分區所之間,以及不同供電臂的牽引變電所之間,這些所亭內的智能裝置的數據反饋模塊均采用IEC 61850 協議通信,通過接觸網光纖復合保護線進行數據信息交互,從而保證了裝置之間通信的實時性。
為實現上述目標,各牽引變電所必須能夠區分負荷狀態、接觸網末端短路狀態及正常運行狀態。
1) 負荷運行狀態及檢測識別。各牽引變電所的數據反饋模塊將數據處理模塊處理后的數據發送至其他供電臂的牽引變電所智能裝置,后者在接收到相關數據后進行延時(此延時與列車運行速度及運行方向有關),并將信息通過監控主機發送給各保護裝置,若在此延時內,各保護裝置檢測到電流量突變,則其認定為負荷增加,機車已經運行到本供電臂,此時擴大過負荷定值,使其與線路末端短路故障進行區分,牽引變電所內保護裝置不跳閘。
2) 接觸網末端短路狀態及識別。若本供電臂變電所在運行中,未收到相鄰供電臂智能保護裝置的數據反饋模塊所發送的有負荷變化的數據信息,但此時本供電臂各處出現線路電流突增,且變電所保護裝置感知到的電流達到過電流保護定值,則可判定為線路末端發生短路故障,需要跳閘,然后牽引變電所保護裝置進入跳閘模式。
過流類保護動作原理如圖3 所示,其中,Iset為過流類保護電流定值,當檢測電流大于電流定值,且未收到相鄰供電臂機車進入區間的信息,延時到達后,即跳閘出口。
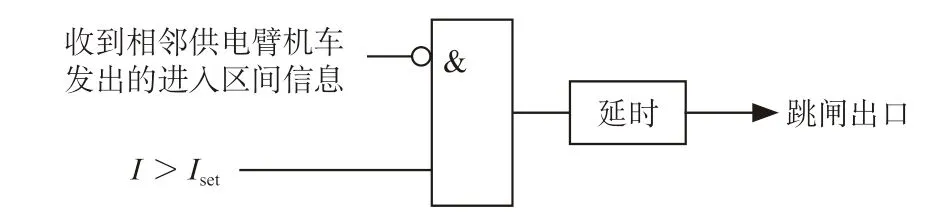
圖3 過流類保護原理
3) 正常運行狀態識別。牽引變電所智能保護裝置的數據處理模塊,將本所及兩側AT 所、分區所智能裝置數據收集模塊上傳的相關數據進行計算,并將所計算結果通過監控主機發送給饋線保護設備,正常運行狀態下,任一智能裝置對故障的判別,均需參考相鄰智能裝置的運行狀態,綜合評估,避免誤判。
3 結束語
各個相鄰牽引變電所或牽引變電所與兩側分區所、AT 所的智能裝置之間,按照IEC 61850 通信標準,通過光纖復合保護線,實現信息交互。牽引變電所智能裝置通過收集本所及其他所相關信息,正確判斷并識別區間負荷運行狀態、接觸網末端短路狀態以及正常運行狀態。當區間處于負荷狀態時,對傳統的過負荷保護及過流類保護進行了自適應性升級改進,確保此類運行狀態下的線路及設備安全,減少了跳閘次數,為電氣化鐵路的正常運行提供了技術支撐。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44
