基于模糊自適應PID 的液壓支架群移架同步控制策略研究
2023-11-29 10:24:54姜家升武俊峰祝永濤
中國礦業 2023年11期
鄭 爽,姜家升,武俊峰,祝永濤
(1.黑龍江科技大學電氣與控制工程學院,黑龍江 哈爾濱 150022;2.雙鴨山礦業集團有限公司,黑龍江 雙鴨山 155199)
0 引言
液壓支架作為采煤過程的重要設備之一,在自主跟機采煤過程中應用于推溜刮板輸送機和移架兩個重要過程,為井下工作人員提供安全保障的同時又承擔著重要工作[1-2]。在移架過程中,液壓支架間的協同控制十分復雜且重要。液壓支架主要有四個過程:升架、降架、移架、推溜,在移架過程中又分為順序移架、成組移架、交錯移架三種方式[3]。為提高采煤效率,加快采煤機的速度,需要液壓支架成組移架或交錯移架以提高跟機速率,在多臺液壓支架同時工作時,多采用同步控制的方式將其移動到指定位置[4]。近幾年,為滿足煤礦“三直一平”中“液壓支架群直”,對減小液壓支架群位置控制同步誤差的要求越來越高,已成為研究熱點[5]。楊繼東等[6]選用Ziegler-Nichols 調節律對PID 參數進行整定,仿真結果表明液壓桿運動的快慢與電磁閥受到的電信號成正比,電磁閥受到的電信號越大、液壓桿運動越快,同時同步誤差就越大。劉曉琳等[7]設計了BP 神經網絡和RBF 神經網絡的PID 控制器控制閥控電液缸同步系統,實驗結果分析得出:在PID 控制器的控制參數不合理的情況下,BP 神經網絡能夠即時調整PID控制參數;同時,RBF 神經網絡能夠修改BP 神經網絡的加權值,使得BP 神經網絡更準確。姚建峰[8]為使升降設備的四個液壓缸實現同步控制,增加系統的平穩性,對整個升降設備結構分析的同時搭建動力學模型,確定了升降設備的四臺液壓缸的最大運行速度、承受的最大壓力、能夠到達的最大位置等。利用多目標遺傳算法得到液壓缸最佳的升降速度和升降設備運行的最佳位置,使得升降設備運行更加穩定,升降更加平穩。利用實驗說明控制過程中對PID 參數進行修改校正能夠更有效地提高系統的同步控制精度。
傳統PID 控制雖然能夠較好地控制單臺液壓支架,但考慮到液壓支架間的協同控制,它并不能滿足要求,為實現液壓支架群同步移架控制,減小同步過程中的同步誤差,需要引用耦合控制方式,同時對PID 參數進行校正,提高系統的同步控制精度,增強系統的抗干擾能力,增強系統的穩定性,使系統響應更迅速[9-11]。
針對上述問題,本文將模糊控制理論與積分分離PID 控制結合,將用于液壓支架同步控制系統的并行同步、主從同步、相鄰交叉耦合和均值耦合這四種經典的耦合同步控制策略與模糊自適應積分分離PID 控制相結合,通過仿真實驗對比得到最優的控制方法,實現液壓支架群同步控制,以減小液壓支架間的位置誤差。
1 液壓支架系統分析
液壓支架總體結構如圖1 所示。液壓支架由頂梁、底座、掩護梁、前連桿、后連桿、立柱、平衡缸和推移裝置等組成[12]。
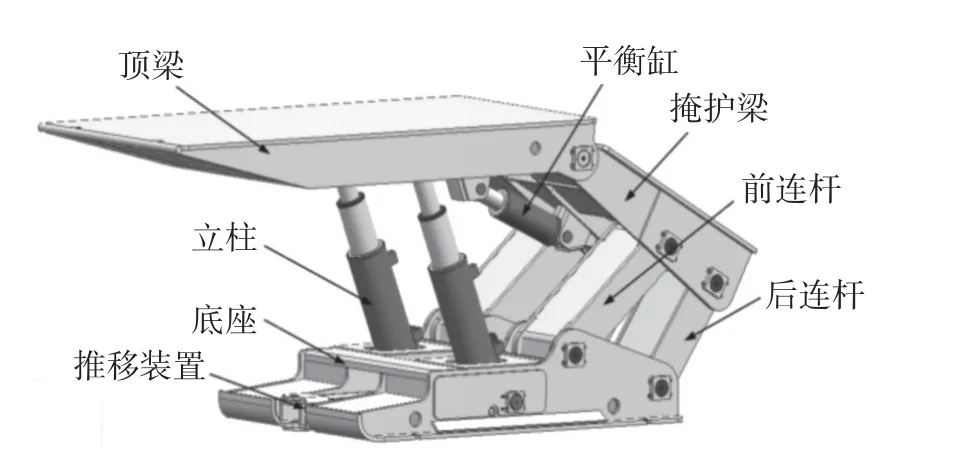
圖1 液壓支架總體結構示意圖Fig.1 Schematic diagram of the overall structure of the hydraulic support
液壓支架群移架過程是指立柱完成降柱動作后,以刮板輸送機為基準,推移裝置帶動液壓支架做收缸運動,移動到指定位置,完成移架過程。移架過程的控制水平直接影響液壓支架群的直線度,決定后續采煤過程能否順利進行。本文采用ZY3200/08/18D型液壓支架作為研究對象,根據ZY3200/08/18D 型液壓支架的參數對AMESim 軟件搭建的液壓缸模型參數進行設置,利用AMESim-Simulink 進行聯合仿真實驗,分析比較四種控制策略,得到最優的控制方法。ZY3200/08/18D 型液壓支架主要的參數見表1[13]。
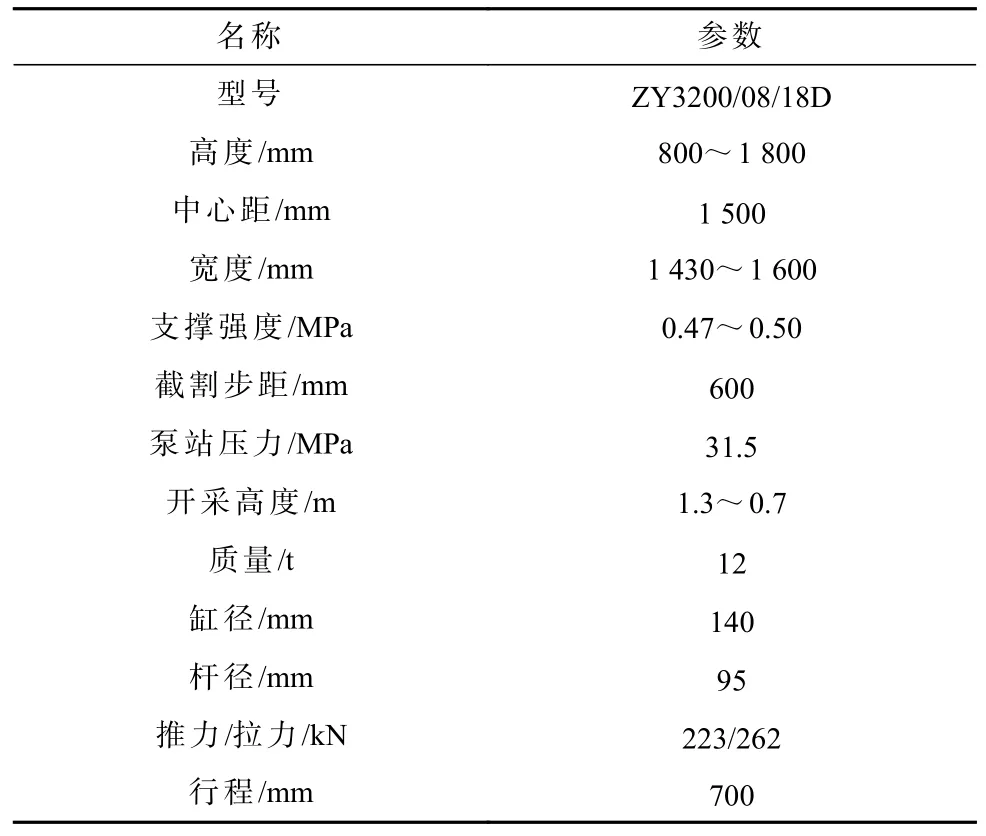
表1 液壓支架主要參數Table 1 Main parameters of hydraulic support
2 控制系統數學模型
閥控非對稱缸結構原理如圖2 所示。假定:油路管道對稱,且忽略管道中的壓力損失;供油的油溫、密度、體積模量等參數均是常數;供油系統為恒壓。
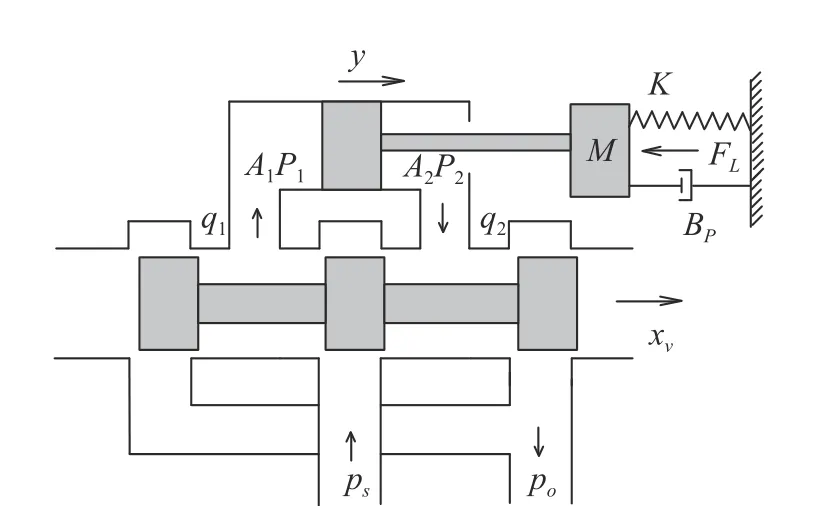
圖2 閥控非對稱缸結構原理圖Fig.2 Schematic diagram of valve controlled asymmetric cylinder structure
當閥芯右移時,閥控缸的動態特性可由閥的流量方程、流量連續性方程以及液壓缸力平衡方程表述,計算見式(1)~式(3)。
式中:QL為負載流量;PL為負載壓力;Kq為流量增益系數;KC為流量壓力系數;Cie為液壓缸等效泄漏系數;Cf為液壓缸附加泄漏系數;βe為彈性體積模量;Vt為等效總容積;Mt為活塞及負載折算到活塞上的總質量;F為液壓缸輸出力;AP為液壓缸活塞有效面積。
對式(1)~式(3)進行拉普拉斯變換,并聯立。假設該系統只存在慣性負載,忽略彈性負載,則可得非對稱閥控缸系統的傳遞函數,計算見式(4)。
液壓缸的傳遞函數計算見式(5)。
將比例方向閥視為二階振蕩環節,其傳遞函數計算見式(6)。
式中:wv為電液比例方向閥的固有頻率;ξv為比例方向閥的阻尼比。
比例放大器的傳遞函數計算見式(7)。
式中:i(s)為比例放大器的輸出電流;u(s)為比例放大器的輸入電壓。
位移傳感器傳遞函數計算見式(8)。
式中:uf(s)為反饋電壓;y為液壓缸活塞位移;Kf為位移傳感器的增益。由式(5)~式(8)可得系統傳遞函數框圖,如圖3 所示。

圖3 系統傳遞函數框圖Fig.3 Diagram of system transfer function block
3 同步控制器設計
3.1 模糊自適應積分分離PID 控制器
采用積分分離PID 控制,模糊PID 控制系統結構如圖4 所示。
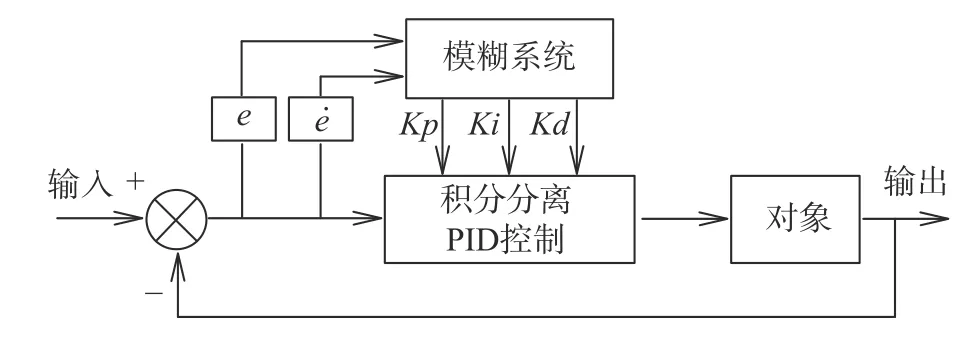
圖4 模糊PID 控制系統框圖Fig.4 Block diagram of fuzzy PID control system
模糊控制原理是將輸入的控制量進行模糊處理,經過設定的規則庫將清晰的控制量變成模糊的控制量,再經過解模糊化后得到清晰的輸出量控制系統。模糊PID 控制在原有的PID 控制器基礎上,將液壓缸的位移誤差e和誤差變化速率ec作為模糊控制系統的輸入,經過設定好的模糊規則,調整PID 參數,將調整好的PID 參數加入到原有的PID 控制器,對原有的PID 控制器參數進行調整,以應對系統再運行時的變化,提高系統對非線性系統的控制精度。在搭建模糊PID 的控制規則庫時,如果設置的規則數目過多會導致掃描規則庫時間過長,程序運行速度下降。因此,一般取3~9 個模糊子集。
分析并綜合考慮液壓缸實際運動情況,將位移e和位移變化率ec離散化為7 個等級,分別為:{NB(負大),NM(負中),NS(負小),ZO(零),PS(正小),PM(正中),PB(正大)};e、ec的論域設為{-6,-4,-2,0,2,4,6};ΔKp、ΔKi、ΔKd的論域均設為{-6,-4,-2,0,2,4,6},模糊子集為{NB,NM,NS,ZO,PS,PM,PB}。本文采用三角形隸屬度函數作為輸入輸出的隸屬度函數。ΔKp/ΔKi/ΔKd模糊控制規則見表2。
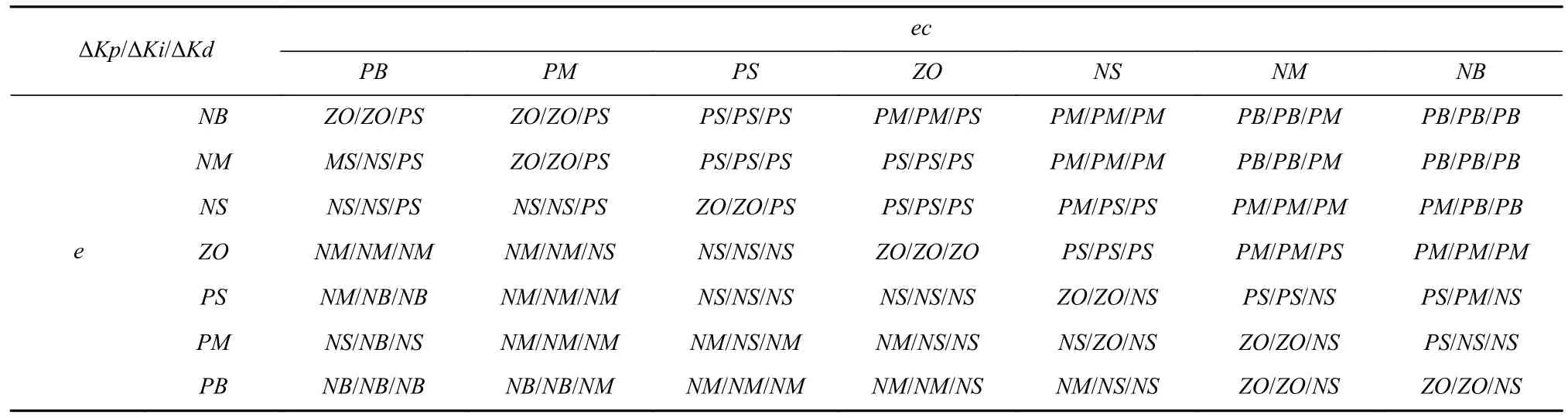
表2 ΔKp/ΔKi/ΔKd 模糊控制規則表Table 2 Table of ΔKp/ΔKi/ΔKd fuzzy control rule
3.2 清晰化處理
解模糊方法包括重心法、最大隸屬度函數法、系數加權平均法三種。采用重心法進行解模糊,計算見式(9)。
式中:u為輸出清晰量;uj為橫坐標;A(uj)為隸屬度函數。
4 控制系統仿真分析
本文采用最常見的液壓缸仿真軟件——AMESim。AMESim 軟件能夠還原液壓缸的具體參數,還可以更改模型數據,同時此軟件開放性較強,能夠與多款軟件進行聯合仿真[14-15]。搭建控制器模型采用Simulink,Simulink 是Matlab 中的可視化仿真工具,具有強大的數據處理能力。使用AMESim 和Simulink 對三臺液壓支架進行聯合仿真,充分發揮兩個軟件的優勢[16-17]。
利用AMESim 軟件搭建三臺液壓缸模型,設置ZY3200/08/18D 型液壓支架的參數,同時對參數進行修改,模擬實際中工作面未知的擾動。利用Simulink搭建四種同步控制器,將采集到的位移信號分析、處理、輸出到AMESim 模型中的電磁閥上,實現對液壓缸的控制。
4.1 液壓系統仿真模型
在AMESim 環境下,搭建了液壓支架同步控制模型,并且創建了一個Simulink 接口模塊。液壓支架同步控制系統AMESim 模型如圖5 所示。
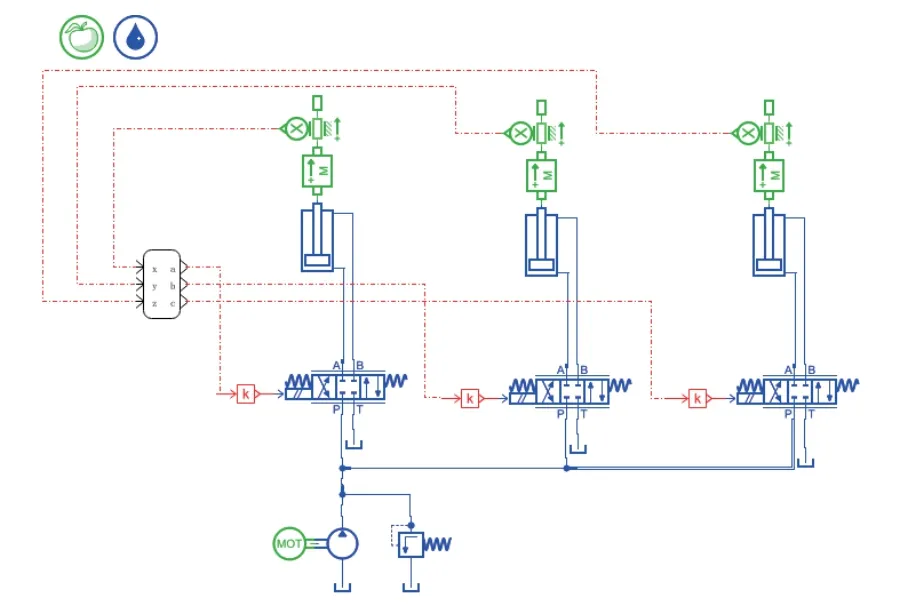
圖5 液壓支架同步控制系統AMESim 模型Fig.5 AMESim model of hydraulic support synchronous control system
根據ZY3200/08/18D 型液壓支架的實際參數對模型進行設定:平衡缸內徑為140 mm,活塞桿直徑為95 mm,行程為0.7 m,方向閥額定流量為100 L/min,泵流量為150 L/min,負載重量為12 000/160 kg,供液壓力31.5 MPa,黏性阻尼系數1 000 N/(m/s),液壓缸泄漏系數4×10-13m3/s/Pa,有效體積彈性模量7×108Pa。
4.2 同步控制器模型
在四種耦合同步控制策略中,并行控制策略將各子系統分別跟蹤給定信號,系統之間不存在耦合作用,使得各子系統間相互作用最小,系統響應速度快[18-19]。主從同步控制策略將控制信號作用在首個液壓缸上,其余液壓缸將前一個液壓缸的輸出作為輸入信號,主從控制方式主要根據各子系統的差別,將響應速度較高的子系統作為從動缸跟蹤主缸運動,達到同步控制效果[20-21]。相鄰交叉耦合控制策略主要是利用相鄰兩缸間的同步誤差,將同步誤差再次作為控制信號,對原控制信號加強或抑制,加強相鄰兩缸的同步控制效果,極大提高了跟蹤精度[2,22]。均值耦合控制策略通過先計算出所有液壓缸的跟蹤誤差,再除以液壓缸的數量,得到平均誤差,將平均誤差經過控制器作用到液壓缸上,對原控制信號加強或抑制,提高同步控制精度。這種策略適合應用在結構復雜、耦合作用強的系統當中,具有運算量小、控制精度高等特點[23]。根據以上特點,在Simulink 中分別建立了四種同步控制策略的系統控制器模型,如圖6 所示。
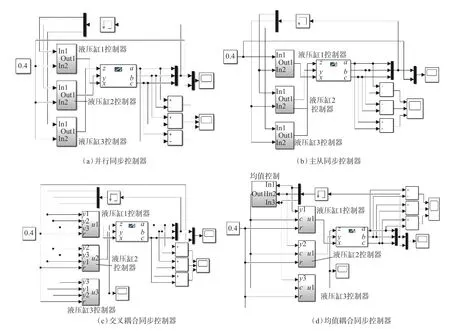
圖6 四種同步控制策略控制器模型Fig.6 Controller models for four synchronous control strategies
4.3 仿真結果分析
4.3.1 穩定性實驗仿真結果分析
在穩定性實驗中,采用模糊自適應積分分離PID 的控制方法,同時與四種控制策略相結合,保證在模型相同、參數相同的情況下,對四種控制策略的仿真結果進行對比分析。
在AMESim 軟件中將液壓桿連接的質量塊分別設置為10 000 kg、30 000 kg、50 000 kg。設置不同的參數以模擬液壓支架在移架過程中因未知的環境因數導致參數不一,仿真結果分別是液壓缸實際的移動距離和液壓缸之間的同步誤差。四種同步控制策略仿真結果如圖7~圖10 所示。
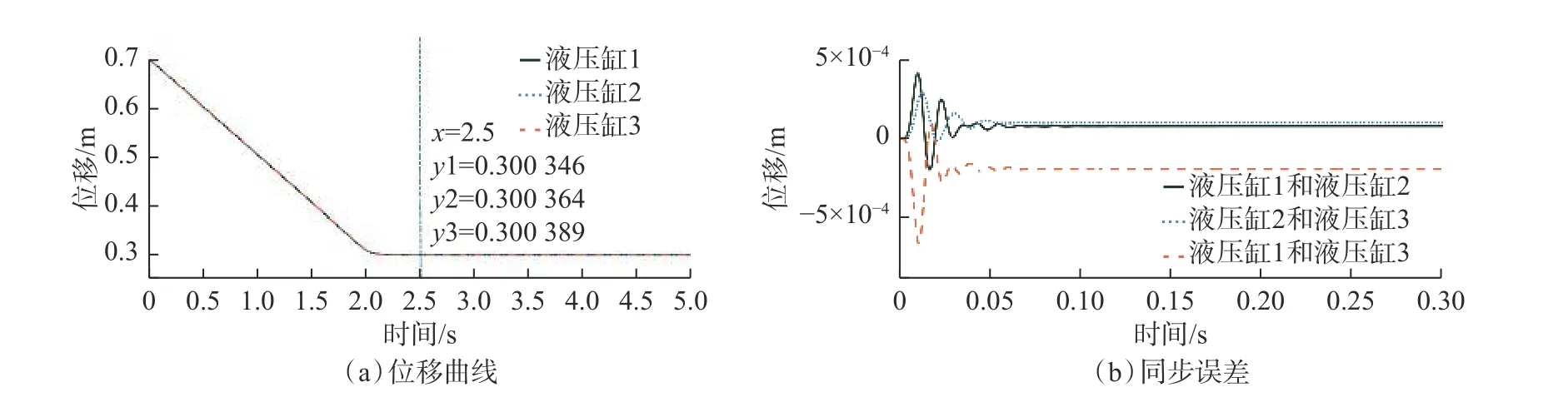
圖7 穩定性實驗均值耦合控制策略位移曲線圖、同步誤差圖Fig.7 Displacement curves and synchronization error diagram of mean-coupled control strategy in stability experiment

圖8 穩定性實驗交叉耦合控制策略位移曲線圖、同步誤差圖Fig.8 Displacement curves and synchronization error diagram of cross-coupled control strategy in stability experiment
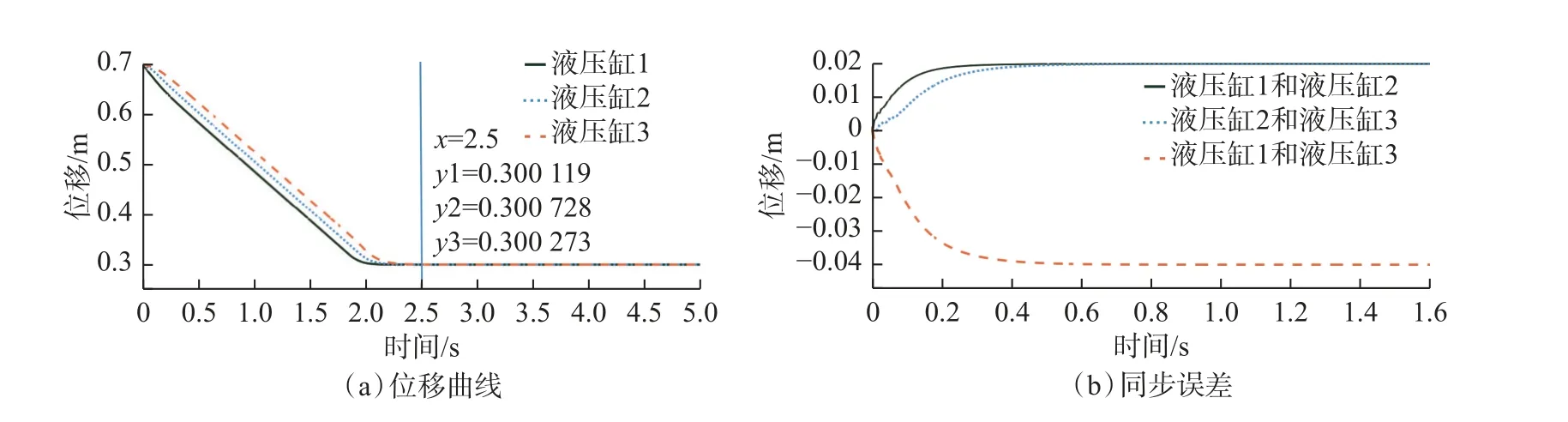
圖9 穩定性實驗主從控制策略位移曲線圖、同步誤差圖Fig.9 Displacement curves and synchronization error diagram of master-slave control strategy in stability experiment
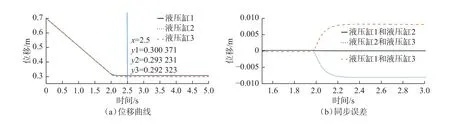
圖10 穩定性實驗并行控制策略位移曲線圖、同步誤差圖Fig.10 Displacement curves and synchronization error diagram of parallel control strategy in stability experiment
從圖7~圖10 可以得出四種控制策略的控制參數,見表3。從表3 中可以看出,對穩定前后同步誤差值綜合比較,控制精度最高的是均值耦合控制策略,其次是交叉耦合控制策略、主從控制策略、并行控制策略。此外,當采用交叉耦合控制策略時,系統在穩定后出現小幅震蕩,這是因為液壓缸間的差值在三臺液壓缸間不能消減,使得三臺液壓缸在穩定時形成小幅振蕩,很難平穩;當采用主從控制策略時,其工作原理是主液壓缸先運動,然后帶動其余兩個液壓缸運動,導致運動過程中有“延后性”,不符合同步控制的“實時性”;當采用并行控制策略時,液壓缸間不存在耦合關系,在改變質量快的參數時,穩定后同步誤差值為90.0 mm,系統穩定性最差;當采用均值耦合控制策略時,三臺液壓缸位移曲線重合度較高,穩定前后的同步誤差值是四種控制策略中最小的,同步效果最好。
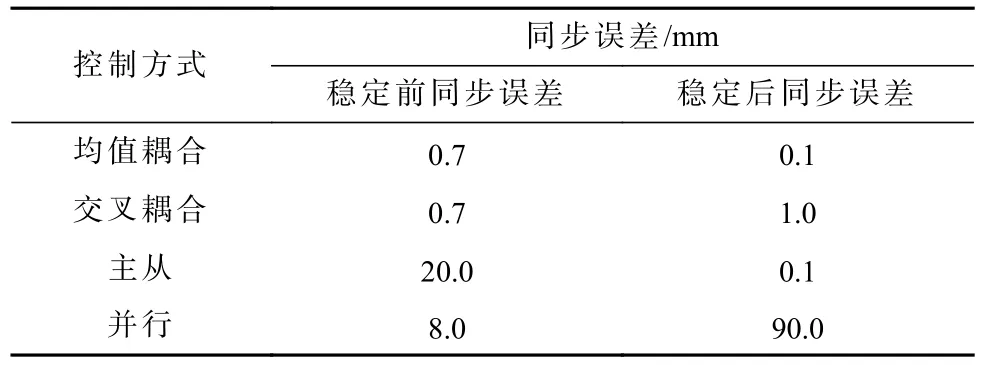
表3 穩定性實驗不同控制策略效果參數Table 3 Effect parameters of different control strategies in stability experiments
通過四種控制策略仿真結果表明,均值耦合同步控制策略,相比于交叉耦合同步控制策略、主從控制策略和并行控制策略,其同步精度更高,系統最穩定。
4.3.2 抗干擾實驗仿真結果分析
通過上述分析得出在穩定性實驗中均值耦合控制策略較于其他三種耦合策略同步精度高,在此基礎上,增加一個擾動外力,進一步比較四種控制策略抗干擾能力及受力后系統恢復的能力。在程序運行的1.0 s 后對三臺液壓缸分別增加三個力為10 000 N、20 000 N、30 000 N。四種耦合同步控制策略仿真結果如圖11~圖14 所示。

圖11 抗干擾實驗均值耦合控制策略位移曲線圖、同步誤差圖Fig.11 Displacement curves and synchronization error diagram of mean-coupled control strategy in anti-interference experiment
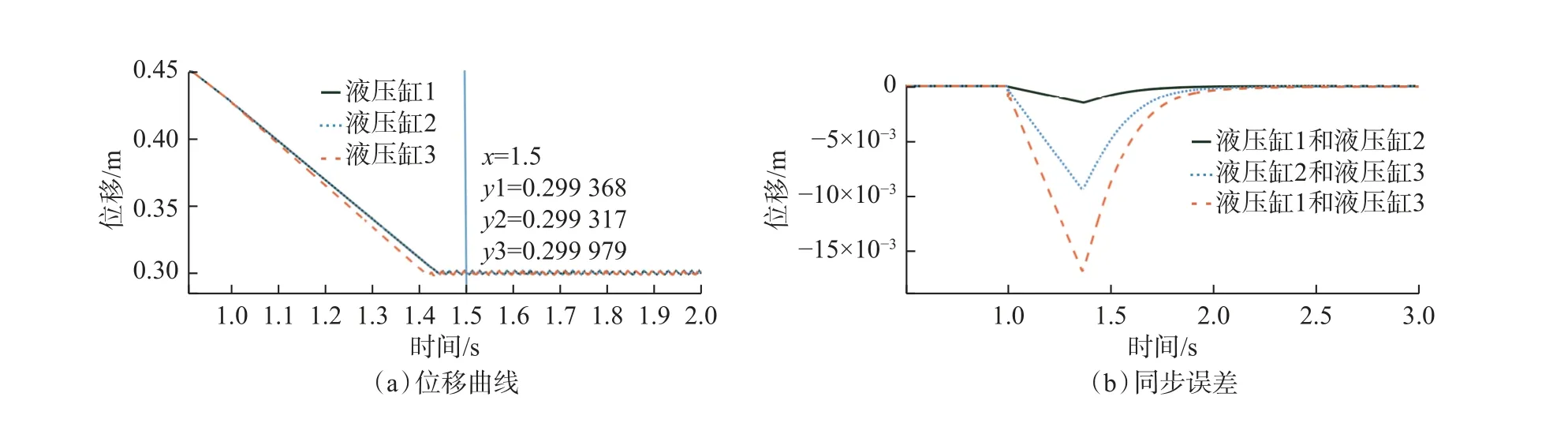
圖12 抗干擾實驗交叉耦合控制策略位移曲線圖、同步誤差圖Fig.12 Displacement curves and synchronization error diagram of cross-coupled control strategy in anti-interference experiment

圖13 抗干擾實驗主從控制策略位移曲線圖、同步誤差圖Fig.13 Displacement curves and synchronization error diagram of master-slave control strategy in anti-interference experiment
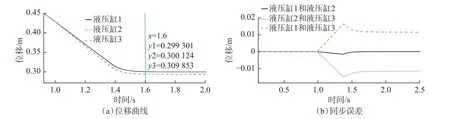
圖14 抗干擾實驗并行控制策略位移曲線圖、同步誤差圖Fig.14 Displacement curves and synchronization error diagram of parallel control strategy in anti-interference experiment
從圖11~圖 14 可以得出四種控制策略在受到外力時的控制參數,見表4。由表4 可知,在1.0 s 增加外力時,均值耦合控制策略的最大同步誤差值為8 mm,受力恢復時間0.8 s,均值耦合控制策略受到的影響較小;交叉耦合控制策略的最大同步誤差值為18 mm,受力恢復時間1.0 s,抗干擾能力比均值耦合控制策略差;主從控制策略和并行控制策略在受到外力時影響較大,受力后系統不能恢復。從上述仿真結果能夠看出,在四種控制策略中,均值耦合控制策略抗干擾能力最強,受干擾后恢復時間最短。

表4 抗干擾實驗不同控制策略效果參數Table 4 Effect parameters of different control strategies in antiinterference experiment
5 結論
本文針對液壓支架群移架過程中存在較大同步誤差問題,將四種經典的耦合同步控制策略與模糊自適應積分分離PID 控制相結合,通過仿真試驗對比,得出了最優的控制策略,以達到減小同步誤差的目的,具體結果如下所述。
1)在穩定性實驗中,通過比較穩定前后最大誤差值,確定系統同步控制精度的高低。經比較四種同步控制策略中均值耦合控制策略同步精度最高、同步誤差值最小。
2)在抗干擾實驗中,通過比較最大同步誤差值和受力恢復時間,確定系統抗干擾能力的強弱。經比較四種同步控制策略中均值耦合控制策略抗干擾能力最強、同步誤差值最小。
綜上所述,四種控制策略中,均值耦合模糊自適應積分分離PID 同步控制響應速度快、同步精度高、抗干擾能力強、同步控制效果最好。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
山東冶金(2019年3期)2019-07-10 00:54:04
模具制造(2019年3期)2019-06-06 02:10:54
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
