基于雷達的新型長壁煤礦機器定位自動化研究
2023-11-30 04:45:26李鵬
機械管理開發 2023年10期
李 鵬
(晉能控股煤業集團有限公司技師學院,山西 大同 037003)
0 引言
煤層通常是夾在巖層之間、高度不等的連續楔形煤。煤炭開采過程的目標是以一種高效和安全的方式提取盡可能多的這種煤層,同時對周圍環境的影響最小。在長壁煤礦中,兩條被稱為“閘道”的長期水平巷道被切割進煤層中,形成被稱為“長壁板”的大型矩形煤塊的主要邊界。道路采礦設備的主要部分是安裝在后面的面板。隨著開采的進行、地質和設備的相互作用造成長壁工作面壓力的變化,導致工作面設備向閘板巷道的側向滑動逐漸增加,稱為長壁蠕變。如果不進行檢查,可能導致長壁設備最終撞到大門路肋,有效地使臉陷入停頓。后退和蠕變對應了長壁閘門巷道采礦設備的沿軌和跨軌位置。由于該設備與整個長壁工作面機械連接,因此閘門道路機械的準確定位能夠改善長壁工藝的管理。相對定位(即對周圍礦山基礎設施如隧道壁的測量)和在整個礦區內的絕對定位都是至關重要的[1-3]。
針對這一應用開發的特定雷達系統改編自FMR 250 工業雷達液位傳感器。本文選擇這種傳感器的首要考慮因素是它能在爆炸性環境中使用,這是煤礦井下富甲烷環境中電氣設備運行的關鍵要求。
1 系統實驗
1.1 雷達系統初始測試
雷達裝置安裝在裝滿煤的盒子上方的可移動龍門上,以便在采煤坑的各個點進行測量。測試包括對煤表面的基本測距,以及基于煤表面上通常會在礦井環境中遇到的各種目標的雷達響應變化的詳細分。肋壁表面沒有任何雜亂,這為初始概念驗證測試提供了理想的條件。為了在現實條件下對傳感器進行完整的現場試驗,需要在更現實的條件下,包括在典型煤礦中發現的管道、標志和其他金屬結構的存在下,對采煤巷道進行一段重要的試驗。
1.2 傳感器平臺系統
井下試驗采用了一套完整的傳感器硬件,安裝在一個試驗平臺上,該平臺設計將儀器設置在與閘門路礦井機械相同的高度。本文開發了一系列定制的應用軟件,以獲取和同步不同的傳感儀器的數據。試驗使用的傳感器有主雷達單元,基于26 GHz Endress Hauser 儀器;三個SICK LMS 200 激光掃描儀,兩個安裝在航行方向的側面,掃描隧道壁(以驗證蠕變測量),第三個在航行方向(以提供與系統撤退估計比較的基礎);用于地下的低照度攝像機;數據采集PC 機(標準便攜式計算機)。實時數據采集系統對來自雷達和激光掃描儀的數據進行時間同步,允許快速后處理、比較分析和數據融合。試驗后的數據處理是在Matlab 中進行的,但數據存儲和檢索協議是為了最終集成到現有的實時長壁自動化軟件系統。
1.3 系統測試描述
在距離肋墻不同偏移距離處,沿著確定的門路段進行了一系列測量。目標被定位在測試航向的每一端為雷達數據提供一個可靠的沿航跡參考從前看激光掃描儀。在2 d 的測試期間,總共獲得了26 個數據集。在大多數測試中,雷達傳感器被放置在測試臺車沿軌道前進方向的90 處,傳感器直接指向肋壁,以提供對蠕變距離的直接測量。金屬網格為雷達傳感器提供了一個額外的雜波源,因此還對試驗巷道的整個試驗長度進行了額外的掃描,以確保能夠生成一個真正具有代表性的數據集,其中包含了絕大多數地下煤礦中遇到的最常見的頂板和肋板條件。
2 試驗結果
原始雷達數據由雷達信號的“包絡曲線”組成。通過掩蔽和背景減法濾波的應用,消除了發射和接收電路之間的增益偏差和串擾等信號偽影。單個雷達軌跡被疊加,形成雷達輸出的三維時變顯示。圖1 顯示了在距肋墻4 m 的雷達偏移距離下測試的典型結果。圖1 中兩個值得注意的特征是:與側隧道相關聯的明顯的缺口對應著一個直通通道,以及與高反射壁掛式螺栓板相對應的主信號回波的頻繁峰值。
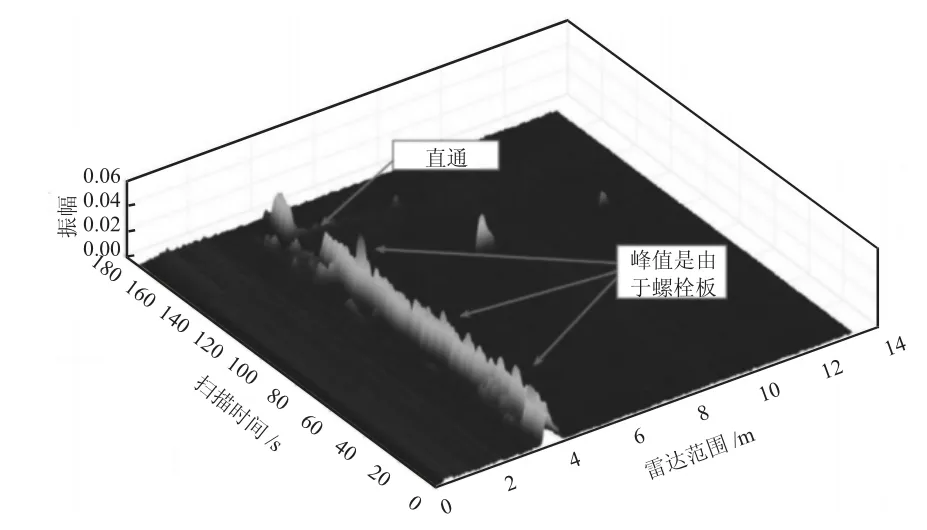
圖1 一段帶截通的門路雷達數據重建
通過合并來自前向掃描器的數據,評估了門路截面的重建平面視圖,使用激光掃描儀進行了幾次測試,以捕獲大門路肋和屋頂的整個表面(見圖2)。進行這些掃描是為了繪制更完整的地雷環境圖像。屋頂的掃描雷達和激光傳感器也獲得為了測試技術的功效在存在網狀表面。詳細的屋頂偵察支持激光掃描儀的數據見圖3。在圖2 和圖3 中,變化與激光的范圍相對應。
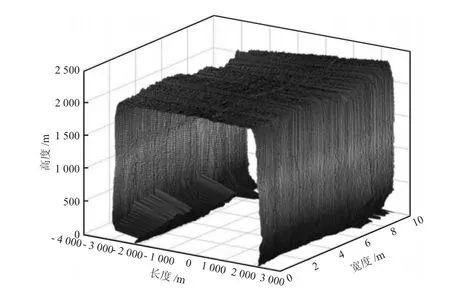
圖2 一段門路拱肋及頂板激光三維重建
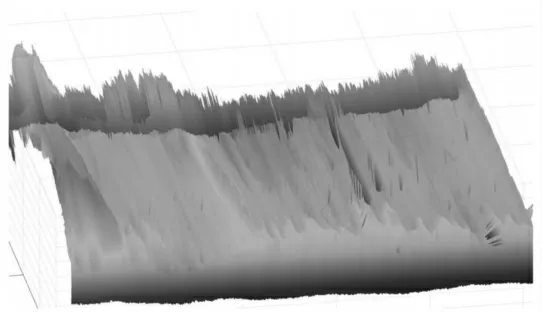
圖3 網格的詳細屋頂部分的激光重建
3 分析與討論
從KF 獲得的蠕變位置估計與激光掃描儀的數據進行了比較,激光掃描儀指向與雷達傳感器相同的肋壁。激光掃描儀生成了離散點的二維掃描線(而不是雷達的單點測量),因此使用激光數據點的中心的平均值進行比較。當激光掃描儀隔爆窗口被灰塵或泥漿遮擋時,會出現較大的垂直偏差,導致在窗口清潔之前對傳感器的估計不準確。這一結果證明了基于雷達的傳感方法的價值,因為雷達安裝在靠近激光掃描儀的外殼中,而不受有效蒙蔽激光的相同灰塵條件的影響。
錨桿支護方式是地下礦山防止巷道塌方的主要支護手段,是礦山嚴格控制的。因此,安裝在閘門道路一段的螺栓數量是一個已知的環境采礦參數,通過跟蹤從前一個割道開始遇到的螺栓數量,可以準確地估計采煤機沿軌道的位置。在兩個過濾后的數據集中,與許多經過的螺栓相關的連續波峰和波谷很容易識別。
本文采用了一種新的數據融合和視覺分析方法,該方法基于將激光掃描儀和雷達數據結合在一個三維交互式顯示器中,以方便檢查重要特征。使原始雷達數據可以直接與激光掃描儀數據生成的表面進行檢查。在試驗過程中,激光單元被定向在垂直平面上掃描,以捕獲門路肋條和車頂的整個表面,并利用激光和雷達傳感器之間的同步,雷達回波信息可以覆蓋,與激光數據提供的高分辨率點云結構相對應。通過調整雷達回波覆蓋在投影肋壁結構上的截面,可以觀察雷達回波的不同方面的變化,并與激光點云的具體特征相關聯。將這種目視檢查數據融合方法應用于礦場試驗的激光和雷達聯合數據集,使雷達回波信息投影到激光掃描儀數據生成的三維表面上。
4 結語
本文描述了一種新的基于雷達的系統,用于地下礦機定位。該方法通過利用地面采礦環境中已經存在的采礦結構(如螺栓板和切割)來生成特征豐富的雷達信號返回,從而避免了安裝額外的參考基礎設施的需要。探索了不同的概率數據處理技術,以提供設備沿軌和跨軌位置的估計。這些估計后來通過使用激光測距掃描儀進行了驗證,發現非常吻合。這些試驗的成功促進了一種改進系統的開發,該系統現在已經準備好集成到作業礦井機械自動化系統中。