協作機器人專利技術研究熱點及趨勢分析
2023-12-09 08:07:42王雪婷
機電產品開發與創新 2023年6期
關鍵詞:研究
馮 龍, 王雪婷, 何 華
(北京市科學技術研究院 智能裝備研究所, 北京 100061)
0 引言
隨著全球勞動力成本的不斷增加, 制造企業需要開發新技術以提高生產率。機器人技術的更新迭代,使人機協作顯示出巨大潛力。相比傳統工業機器人,協作機器人憑借著安全、靈活、易部署等特點,快速融入多元場景,在工業、物流、醫療、教育等諸多領域實現了良好應用,尤其自2020 年新冠肺炎疫情發生以來,協作機器人因具有無人接觸、遠程服務、代替人工等優勢,更是發揮了重要作用,得到了快速發展。專利作為科技發展的前沿蘊含著大量的技術創新信息, 通過對協作機器人的專利進行分析能夠客觀地認識到行業相關技術的研發現狀, 對相關政府、高校、科研院所及企業的決策制定、調控及研發布局具有一定的意義[2]。 本文聚焦協作機器人,通過使用incoPat 全球專利數據庫,從時間及地域兩個維度對協作機器人技術熱點及技術發展趨勢進行研究, 為國內協作機器人企業、高校科研院所的技術研究和創新提供參考。
1 數據來源及檢索方式
1.1 數據來源& 檢索方式
本文專利檢索部分數據來源為Incopat 全球專利數據庫,輔助使用ItgInsight[6]工具進行數據分析[1]。 在進行檢索前, 首先結合協作機器人的主要構成和應用領域對協作機器人技術主要IPC 分類號進行提取, 在得到協作機器人IPC 分類號的基礎上,結合協作機器人常用關鍵詞,確定協作機器人專利檢索式。
1.2 IPC 分類& 檢索降噪
通過將協作機器人技術分為本體技術、控制系統技術、驅動系統技術及應用場景技術四大類后, 再依據IPC 分類表對各技術關鍵詞匹配IPC 分類號, 得到協作機器人技術分支及其對應的IPC 分類號[4],如表1 所示。 由于協作機器人應用領域廣泛的特殊性,為防止醫療機器人、服務機器人等與協作機器人無關的噪聲出現,本文檢索側重于“檢準”原則。 因此檢索結果可能無法涵蓋一些“非典型”協作機器人公司所申請的專利,如鎂伽科技公司的相關專利。

表2 國內協作機器人研究熱點省市專利技術主題詞分布
2 全球協作機器人專利技術研究熱點及趨勢
2.1 全球協作機器人專利申請趨勢
雖然近年全球機器人產業專利增速逐步趨緩[3],但協作機器人專利申請呈快速增長態勢。 從1985—2022 年全球協作機器人領域專利申請情況來看, 協作機器人發展大體分為3 個階段。 第一階段(1985—2007):在這一階段,專利申請較少,數量在10 件以內波動。 申請人數量也較少, 企業投入意愿較低, 處于技術的萌芽期。 第二階段(2008-2014):專利申請數量較之前有明顯攀升,整體呈增長態勢,數量維持在100 件以內。 第三階段(2015—至今):自2015 年起,協作機器人專利呈急劇增長態勢,并在2021 年達到頂峰,數量為918 件。由于專利公開存在滯后性,2021—2022 年部分發明專利未能完全統計在內。因此2022 年專利申請量的下降并非實際專利申請量下降。

圖1 全球協作機器人專利申請趨勢
2.2 全球協作機器人專利技術演變
從1985 年—2022 年的發展歷程來看,協作機器人的研究熱點主要經歷了三個階段:
第一階段(1985—1990 年):多以協作機器人本體結構和用于機器人的控制方法為主展開研究, 代表專利如1986 年來自保加利亞的“協作機器人平衡機械手”專利、1987 年來自美國發那科的“機械腕機構“專利、1990 年來自日本的“用于機器人的控制方法”專利等;
第二階段(1991—2009 年):在這一階段,關于協作機器人本體的基礎研究逐漸增多, 并依次在焊接、 裝配拆卸、理療按摩、機床加工等工業領域開展應用研究。 同時關于軌跡跟蹤、參數優化、實現人機協同的數據處理等協作機器人關鍵技術也在這一階段得到沉淀和積累;
第三階段(2010—至今):在這一階段,協作機器人本體研究較之前發展速度有明顯大幅提升, 應用場景在深耕工業領域的基礎上,逐步向手術醫療、教育、管理等行政領域進一步拓展。同時,關于協作機器人核心零部件技術的專利也開始廣泛布局,拖動示教、機器視覺、精度測試、碰撞檢測等一系列人機交互和自主認知技術也在這一階段興起。
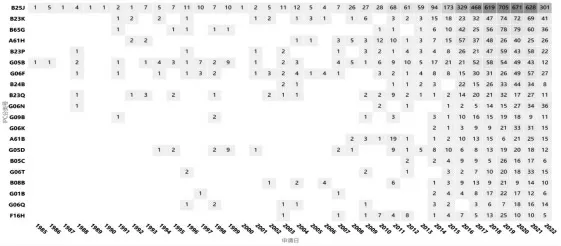
圖2 全球協作機器人專利技術研究趨勢
2.3 全球協作機器人專利技術研究熱點
通過對全球協作機器人主要IPC 分類進行整理和匯納,可以發現協作機器人技術熱點主要分布在本體和末端執行器、焊接裝配等工業場景應用、手術理療等醫療機器人、運動軌跡的跟蹤和優化以及算法方面,如圖3 所示。
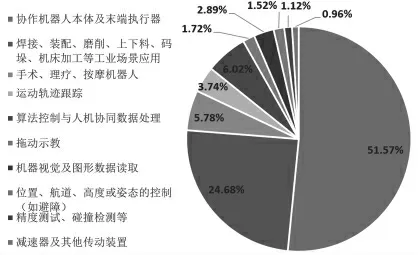
圖3 全球協作機器人專利技術研究熱點
3 國內協作機器人專利技術研究熱點及趨勢
3.1 國內重點地區協作機器人專利技術研究熱點及趨勢
將我國按照長三角、珠三角、京津冀和東北地區進行區域劃分,可以了解國內不同地域下的協作機器人熱點分布情況。從我國不同地區專利分布來看,長三角地區:協作機器人產業鏈布局較為齊全,在本體、核心零部件與其他關鍵技術方面的占比都領先全國其他地區。 相對來說,長三角的研發熱點主要包括:協作機器人本體領域;零部件領域中的傳感器、控制器、伺服電機與抱閘;關節模組一體化、智能自主和機器視覺等關鍵技術。 ①珠三角地區:在核心零部件領域具有較強優勢,其研發熱點主要包括:減速器和抱閘;本體領域中的機器人本體與機械臂以及智能自主關鍵技術;②京津冀地區:研發熱點主要集中于末端執行器、編碼器和機器視覺領域,相對而言在機械臂、伺服電機與智能自主技術方面布局占比較少;③東北地區:在運動控制這一關鍵技術具有明顯優勢,而在抱閘這一零部件的布局上與其他地區相比具有明顯差距,如圖4 所示。
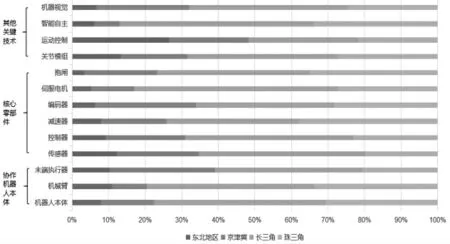
圖4 國內重點地區協作機器人專利技術研究熱點布局
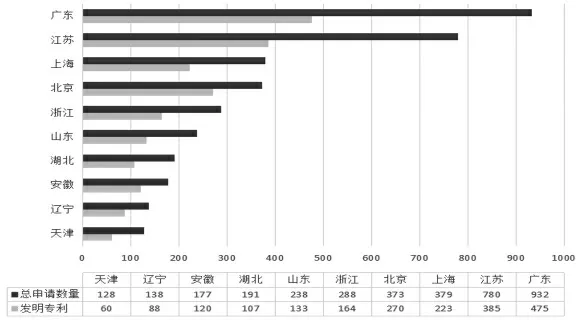
圖5 國內協作機器人研究熱點省市專利技術申請量
3.2 國內協作機器人專利技術研究熱點省市
通過對中國協作機器人專利按照省市進行排名,前五名分別是廣東、江蘇、上海、北京和浙江,北京在專利申請總量上位居全國第四位。但從發明專利的比例上看,北京發明專利占比最高,達到72.39%,一定程度上反應出北京的研發創新優勢。 廣東、江蘇兩地實用新型專利占比較高,一定程度上反應出兩地協作機器人研發成果的產品應用較多。
3.3 國內不同省市協作機器人專利布局差異
通過對比不同省市協作機器人專利主題詞分布情況可知,北京市在末端執行器、傳感器、編碼器、關節模組、運動控制與機器視覺等方面具備一定優勢; 廣東省專利數量在全國排名第一,其產業鏈布局也較為齊全,其中在協作機器人本體、機械臂、減速器、編碼器方面的專利布局上領先優勢突出; 江蘇省在全產業鏈布局方面也較為突出,其中,在末端執行器、傳感器、控制器、伺服電機、關節模組與機器視覺方面的專利布局優勢突出。
4 結論
(1)協作機器人技術發展正處于快速成長期。 從1985—2022 年全球協作機器人專利申請情況來看,協作機器人技術在不斷發展,市場在不斷擴大,專利權人也在急劇增長。當前, 無論是專利數量還是申請人數量都處于快速增長階段,并沒有放緩趨勢,尚未顯露出技術成熟期階段的放緩趨勢,因此可以判定協作機器人技術正處于快速成長時期。
(2)協作機器人專利技術創新突破領域。通過分析全球協作機器人專利技術研究熱點可以發現, 目前全球范圍內在協作機器人拖動示教(G09B)、機器視覺及圖形數據讀取(G06V)、位置及姿態控制(G05D1/02)、精度測試與碰撞檢測(G01B21)以及協作機器人減速器等傳動裝置方面(F16H)專利技術布局仍較少。 當然協作機器人也面臨很多實際應用場景適應性、可靠性與安全性提升的問題。例如通過感知外部極小的力矩變化并做出反應避免碰撞(G01L3/G01L25),讓人機協作過程更輕松(G06F)、安全和精準控制(G05D19/G05B)等方面都是在實際應用場景中要解決的問題,上述相關領域可作為后續高校、科研院所及行業企業研發創新的突破口。
(3)協作機器人技術研究熱點由機構學向機器視覺、觸覺、控制算法、人工智能領域轉變。 通過分析全球協作機器人專利技術研究熱點及趨勢可以發現,目前高校在協作機器人領域的研發方向已由原來的機械手、機械臂的設計向機器視覺、觸覺、人工智能、控制算法等方向轉變,如哈佛大學目前在做的柔性機器人、斯坦福大學在做的機器人觸覺、清華大學在做的視覺語義感知、北京航空航天大學在做的機械臂感知與運動規劃等,這些研究的目的都是為協作機器人本體更好的賦能。
(4)協作機器人在非工業應用領域專利技術布局逐漸增長。協作機器人作為一種新興的工業機器人品類,其產品面向的應用場景已拓展至工業應用場景以外的消費領域范疇,近年協作機器人專利技術在教育、手術、康復、理療、新能源充電樁、餐飲(飲料制備)、肉類加工、服裝(縫紉)等領域申請量逐年增長。 相較于傳統工業機器人,協作機器人因具備人機協作、易裝配、安全等特點,使其具有更廣泛的應用場景領域。
(5)從專利布局看國內主要協作機器人省市布局特點。從國內協作機器人專利技術申請量看,廣東省、江蘇省、北京市和上海市排名靠前。 從四個省市協作機器人專利技術布局情況看,北京市發明專利占比最高,創新優勢明顯,這主要得益于北京市高校及科研院所資源豐富,專利大多集中在高校和科研院所[5],且北京市協作機器人企業多以本部加研發機構為主有關。廣東省、江蘇省專利申請量多,實用新型占比量較高,這得益于協作機器人企業生產制造多布局在兩地有關。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學報(2017年2期)2017-07-05 08:13:02
國際商務財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19
