煤礦企業(yè)轉型下的掘進機器人可靠性分析
2023-12-11 03:04:16王磊
現(xiàn)代商貿工業(yè) 2023年24期
王磊

摘?要:在當前煤礦企業(yè)面對產業(yè)轉型,低碳發(fā)展的情況下,為了分析掘進機器人的可靠性,提升采礦過程中操作人員安全,幫助企業(yè)更好、更平穩(wěn)地度過轉型期。通過對煤巷掘進機器人的故障模式影響和危害性分析,本文探討了其可靠性的評估方法。結果表明掘進機器人最容易出現(xiàn)故障的部位是示教機,所以應該加緊進行智能化改裝,讓其擁有自主工作能力,減少操作人員的介入,避免發(fā)生人員傷害,以此幫助企業(yè)轉型。
關鍵詞:掘進機器人;FMECA;可靠性分析
中圖分類號:F27?????文獻標識碼:A??????doi:10.19311/j.cnki.16723198.2023.24.027
0?引言
隨著“中國制造2025”國家戰(zhàn)略以及“十四五”規(guī)劃的提出,在我國工業(yè)發(fā)展上,智能化已經成為一種必然趨勢。作為工業(yè)高質量發(fā)展的基石,煤礦工業(yè)的安全高質量發(fā)展是至關重要的。目前的煤礦掘進裝備仍然需要輔助人力,需要先對機器人的示教機進行編程,然后根據現(xiàn)場情況進行協(xié)調指揮。但是由于礦井下復雜的地理環(huán)境以及不確定性的安全隱患,對于操作人員的人身安全造成威脅。鑒于此,掘進設備的智能化和機器人化是實現(xiàn)安全生產的有效途徑。
1?掘進機器人
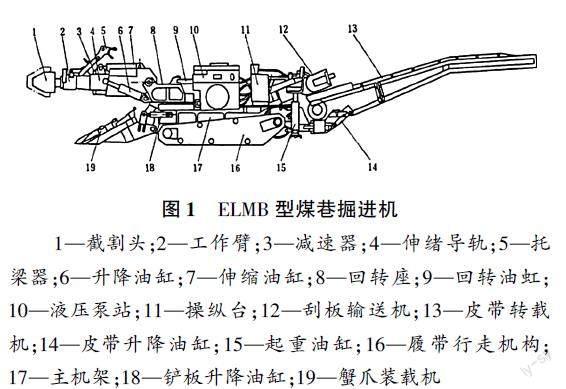
本文以ELMB型煤巷掘進機為例(如圖1-1),為了應對井下復雜的工作環(huán)境,掘進機器人需要具備高級的智能控制和參數(shù)感知能力。
圖1?ELMB型煤巷掘進機
1—截割頭;2—工作臂;3—減速器;4—伸緒導軌;5—托梁器;6—升降油缸;7—伸縮油缸;8—回轉座;9—回轉油虹;10—液壓泵站;11—操縱臺;12—刮板輸送機;13—皮帶轉載機;14—皮帶升降油缸;15—起重油缸;16—履帶行走機構;17—主機架;18—鏟板升降油缸;19—蟹爪裝載機
機械、電子、計算機等多種類型的元器件和控制軟件共同組成掘進機器人的復雜系統(tǒng)。為了滿足本文研究的需求,同時夜微涼突出掘進機器人關鍵部件所產生的重要性,將掘進機器人整體拆分,劃分為本體、控制系統(tǒng)和驅動系統(tǒng)三個子系統(tǒng),他們具備的特點和功能如下:
1.1?本體
掘進機器人的本體一般由多個部分組成,通常包括回轉座、工作臂、運動油缸、液壓泵站等,是掘進機器人動作的執(zhí)行部件。回轉座是機器人的核心部件,它負責控制機器人的運動方向,具有足夠的強度和剛度,并且穩(wěn)定性良好。工作臂位于回轉座的上方,可以實現(xiàn)回轉運動,從而改變機器人的工作范圍。伸縮、升降油缸通過控制油缸內的壓力,來調節(jié)工作臂的位置,從而幫助機器人完成工作。液壓泵站的主要功能是為油缸提供壓力。
1.2?控制系統(tǒng)
掘進機器人的控制系統(tǒng)的主要功能有:一是控制機器人的本體完成指令規(guī)定的動作,二是需要能夠做到人機交互,把操作人員的指令通過編碼傳輸給機器本體之中。掘進機器人的控制系統(tǒng)由以下幾個部分組成:示教器、傳感器、編碼器、通信接口等,可以快速對附加硬件進行集成,對提升機器人的云頂精度、性能等能力具有至關重要的作用。
1.3?驅動系統(tǒng)
驅動系統(tǒng)是掘進機器人的核心部分,它可以通過輸入伺服信號來控制電機的運行,這些驅動方式包括液壓驅動、氣動驅動和電動驅動等,它們可以滿足不同的工業(yè)需求,其中通過電機直接驅動取消機械傳動部件是工業(yè)機器人伺服驅動系統(tǒng)當前的研究熱點和發(fā)展趨勢。由于掘進機器人所要進行的工作是進行隧道挖掘、破壁等工作,所以采用液壓驅動的方式,通常液壓驅動系統(tǒng)也被用于大型工業(yè)機器人。液壓驅動系統(tǒng)主要是為掘進機器人提供巨大的速度和強度,在掘進機器人工作過程中需要提供前進方向的動力以及對于巷道的支撐力,防止掘進過程中巷道塌方而被掩埋。
2?可靠性分析
為了保障掘進機器人能夠正常安全地運行,就要求機器人的各個子系統(tǒng)都能夠可靠地運行,這就意味著在掘進機器人的設計過程中不僅僅元器件的可靠性和制造工藝的可靠性需要重視,各個子系統(tǒng)在可靠性方面也要同樣的重視。可靠性是度量產品可信賴、可靠程度的評價指標,其定義是在規(guī)定的條件、時間下完成規(guī)定功能的能力。可靠性評估方法通常包括故障模式及影響分析和危害性分析(Failure?Mode?Effects?and?Criticality?Analysis,F(xiàn)MECA)、故障樹分析法(Fault?Tree?Analysis,F(xiàn)TA)。
故障模式影響及危害性分析(Failure?Mode,Effects?and?Criticality?Analysis,簡稱FMECA)是由故障模式影響分析(FMEA)和危害性分析(Criticality?Analysis,即CA)組合構成的用于分析故障模式的方法,能夠定性、定量地分析歸納全部子系統(tǒng)和零部件可能發(fā)生的每一種故障模式及故所產生的影響,再按照嚴重程度進行分類。對各種不同的故障模式進行定性、定量的評估,以確保主機的安全運行,并有效地預測潛在的損失,從而進一步提高主機的安全效率,提升主機的整體壽命,進一步提高主機的安全運行效果。20世紀50年代初,美國格魯門公司開始使用FMECA分析法來評估飛機的性能。經過多年的實踐,F(xiàn)MECA的準確性和可靠性得到了顯著的改善。而1964年,美國科學院的Coutinbo也首次發(fā)表了他的分析結論,指明了故障的類型和可能的原因。在80年代初期,F(xiàn)MECA技術已經廣泛應用于各種領域,從航空航天到福特汽車,它不僅能夠有效地提高電子元器件的可靠性,還能夠有效地改善汽車的電氣設計。此外,中國也在這段時期內,積極推廣FMECA,并將其應用到本土,制定出多項與本土相匹配的規(guī)范。在接下來的幾十年中,F(xiàn)MECA的使命已經超越了原本的高科技領域,如飛行、火箭、軍事、農業(yè)、工業(yè)、教育、衛(wèi)星、能源、環(huán)境監(jiān)測、能源管理、能源利用、能源保障、能源安全。FMECA分析法已經發(fā)展為全球領先的可靠性分析技術,其結果被嚴格按照《GJB/Z?1391-2006?故障模式、影響及危害性分析指南》的要求進行評估,這也使得FMECA分析法得到了更加完善的發(fā)展。
FMECA分析是一種十分先進的技術,它不僅能夠幫助企業(yè)更好地了解產品的失效情況,還能幫助企業(yè)更好地識別出潛在的問題,從而更好地改善產品的質量,它的使用十分方便,非常適合各種行業(yè)的需求。盡管采取的定性分析只能夠解決部分問題,比如單個影響因素,也不能夠充分反映出不同的故障模式,比如說,當發(fā)現(xiàn)某種設備或者產品出現(xiàn)了共同的問題時,這種分析方法就會受到較大的制約,盡管如此,它的應用范圍也相當廣闊,能夠覆蓋到整體壽命的每個環(huán)節(jié),從而獲得較好的實際應用價值。這里為了驗證掘進機器人的可靠性,就使用FMECA分析法對機器人以及各個子系統(tǒng)進行分析。
2.1?FMECA分析步驟
(1)系統(tǒng)定義。方便分析人員對產品進行功能分析和功能框圖繪制。
(2)故障模式分析。分析掘進機器人工作過程中可能發(fā)生的故障。
(3)產生故障原因分析。針對每個故障,找到引發(fā)故障的原因,例如設計缺陷、環(huán)境因素等。
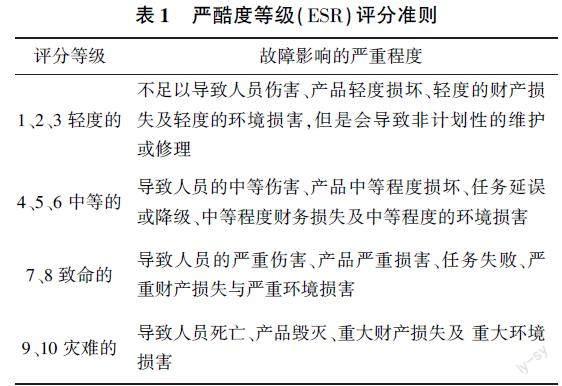
(4)故障影響及嚴酷度分析。通過嚴格的評估,我們可以準確地衡量機器人故障模式對系統(tǒng)性能的影響。詳情請參見表1。
(5)故障發(fā)生概率等級(OPR)。通過對某個故障模式的實際發(fā)生可能性進行評估,我們可以將其分為不同的等級,并以此為基礎確定它們的概率值范圍。發(fā)生概率等級評定準則如表2所示。
(6)CA分析。通過采用RPN法,我們可以根據風險優(yōu)先級的不同,對掘進機器人的風險進行有效的排序,從而更加直觀地識別出風險最高的部位。
RPN、ESR、OPR三者的關系如:RPN=ESR*OPR
2.2?FMECA約定層次
合理的約定層次是FMECA的基本要求,在本文中將掘進機器人按照結構進行劃分,所以將掘進機器人分為三個子系統(tǒng),分別為本體、控制、驅動,其各自的結構組成如圖2示
2.3?掘進機器人FMECA分析結果
通過詳細分析,我們得出了表3中的詳細結論。
由表3-3和圖3-2可以看出機器人各種功能、故障以及出現(xiàn)故障的原因,由結果來看示教器的故障頻繁性是最高的,緊隨其后的是回轉座與工作臂。由此可知,在掘進機器人工作過程中由于采礦通道的環(huán)境以及示教器在設計方面智能化水平過低,在面對復雜的工作環(huán)境中,經常會發(fā)生一些風險優(yōu)先數(shù)比較高的風險,不僅采礦的進程會受到影響,操作人員的安全也得不到保證。
3?總結與展望
本文對掘進機器人的結構和功能進行了分析,為了驗證掘進機器人的可靠性,采用了常用的故障模式影響及危害性分析(簡稱FMECA)。經過系統(tǒng)深入的分析,我們發(fā)現(xiàn),ELMB掘進機器人的智能化水平較低,不能根據工作環(huán)境自主分析和判斷,導致了在煤礦巷道作業(yè)時,需要的作業(yè)人員數(shù)量多,工作環(huán)境惡劣。人員需要付出的勞動強度大,嚴重危害了工作人員的健康和安全。
所以在此基礎之上,由于現(xiàn)在信息技術的進步,可以給老式的掘進機進行現(xiàn)代化改裝,讓其能夠自行在危險的井下環(huán)境中工作,不僅提高了工作效率,也減少各種機器故障和人員傷害。加裝人工智能決策系統(tǒng)以及視覺系統(tǒng),讓掘進機器人能夠根據井下的情況自行判斷各個子系統(tǒng)的工作方式,減少人員的介入,降低勞動強度,免受惡劣環(huán)境的侵害,才能幫助現(xiàn)代煤礦行業(yè)更快地進行技術升級和轉型。
參考文獻
[1]張雨婷.基于知識整合的新松公司技術創(chuàng)新能力研究[D].哈爾濱理工大學,2017.
[2]楊斌.工業(yè)機器人的可靠性分配方法研究[D].電子科技大學,2019.
[3]程秀作.基于信息融合的工業(yè)機器人整機可靠性分析_程秀作[D].電子科技大學,2020.
[4]王毅.螺旋輪式驅動管道檢測機器人控制系統(tǒng)研究與實現(xiàn)[D].天津理工大學,2016.
[5]李欣.工業(yè)機器人體系結構及其在焊接切割機器人中的應用研究[D].哈爾濱工程大學,2008.
[6]黃敏高,龔仲華,王芳,等.工業(yè)機器人驅動系統(tǒng)現(xiàn)狀與展望[J].機床與液壓,2018,46(3):7983.
[7]吳鍵,張昕,陳燦,等.基于FMECA的CT探測器可靠性分析[J].中國檢驗檢測,2021,29(6):58.
[8]蔣平,李浩澤,杜洪恿,等.基于FMECA方法的旋耕機可靠性分析[J].中國農機化學報,2019,40(12):212216.
[9]LiJun,Xu?Huibin.Reliability?Analysis?of?Aircraft?Equipment?Based?on?FMECA?Method[C]//Physics?Procedia:?Elsevier,2012:18311837.
[10]Jin?Chuanxi,Ran?Yan,Zhang?Genbao.Intervalvalued?qrung?orthopair?fuzzy?FMEA?application?to?improve?risk?evaluation?process?of?tool?changing?manipulator[J].Applied?Soft?Computing?Journal,2021,104.
[11]Ayhan?Mentes,Ismail?H.Helvacioglu.An?application?of?fuzzy?fault?tree?analysis?for?spread?mooring?systems[J].Ocean?Engineering,2010,38(2).
[12]張大鋼,劉雁潮,韓靜,等.故障模式影響及危害性分析(FMECA)技術標準發(fā)展和應用研究[J].質量與可靠性,2013,No.165(3):4851.
[13]戴云徽,韓之俊,朱海榮,等.故障模式及影響分析(FMEA)研究進展[J].中國質量,2007,(10):2326.
[14]張志強,莫建軍.考慮故障模式相關性的FMECA分析[J].電子測試,2022,36(22):4346.