波前校正的變論域模糊控制方法
2023-12-12 12:32:10張亦睿周益林賈晶晶李趙儀
激光與紅外 2023年11期
張亦睿,陳 波,周益林,賈晶晶,李趙儀
(華北理工大學 電氣工程學院,河北 唐山 063210)
1 引 言
自適應光學系統(tǒng)主要分為無波前探測型和波前探測型[1],基于哈特曼-夏克(Hartmann-Shack,H-S)傳感器的波前探測系統(tǒng)目前仍廣泛應用于高速實時校正技術中[2],利用比例-積分-微分(Proportion-integral-differential,PID)算法即可實現(xiàn)較好的效果[3]。但傳統(tǒng)的PID控制依賴于變形鏡的響應模型[4],響應模型易受擾動影響因此標定過程較為復雜。針對此問題,2017年劉章文等人[5]提出了一種模糊PID控制方法,該方法利用波面加權模板[5],無需對響應矩陣進行標定,擺脫了對變形鏡對響應模型的依賴[6],證實了模糊PID控制應用于波前校正的可行性。2020年,張丹玉[7]提出一種雙重模糊PID算法,該算法更加靈活,提高了系統(tǒng)的自適應性,但輸入輸出論域的選取要根據(jù)實驗環(huán)境使用專家經(jīng)驗法判定,不合適的論域選取會影響波面評價指標[7]進而影響系統(tǒng)校正效果。2021年,程爽[8]提出一種基于PID控制的殘差校正畸變算法,應用于大幅度畸變波前校正[8],實現(xiàn)了對畸變變量中除周期擴展外殘差部分的消除,但仍需對響應矩陣進行分析,計算量較為復雜。
針對上述問題提出一種變論域模糊控制(Variable domain fuzzy control)方法,對波前校正過程進行了優(yōu)化。變形鏡的每一個驅(qū)動器都有獨立的變論域模糊推理過程,對比例、積分、微分系數(shù)分別進行自整定,也就無需對變形鏡的響應模型進行標定,同時具有更高的自適應性。波前校正實驗的結(jié)果表明,經(jīng)變論域模糊控制校正后波面的波前峰谷值(Peakto Valley,PV)與波前均方根值(Root Mean Square,RMS)均小于傳統(tǒng)模糊控制校正后的波面,波前殘差的均方根值也更小。控制器性能實驗的結(jié)果表明,變論域模糊控制較傳統(tǒng)模糊控制魯棒性更高、響應時間更短,最終實現(xiàn)增強系統(tǒng)校正的適應能力、提高校正效率與準確度的目的。
2 變論域模糊控制模型及校正原理
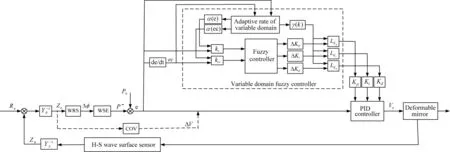
圖1 波前校正的變論域模糊控制模型
2.1 波面評價指標的提取
WRS為波前重構過程,設波前重構矩陣為A,WRS計算過程如公式(1)所示:
Δφ=AZn
(1)
WSE為波面評價過程,波面評價過程主要是從實時重構出的波前Δφ中提取波面評價指標P,對應變形鏡單個驅(qū)動器采集重構波面的深度信息[5]。COV為PID控制時的電壓解算過程,傳統(tǒng)PID控制跳過WRS和WSE,直接由Zn通過COV解出電壓殘差ΔV輸入到PID控制器。電壓殘差ΔV可表示為:
ΔV=BAZn=BΔφ=CZn
(2)
式中,B即為變形鏡的響應模型矩陣。可以看出,傳統(tǒng)PID控制嚴格依賴矩陣B,而矩陣B的標定又容易受到變形鏡溫度漂移、振動干擾等因素影響,最終對整個校正過程的精確性與快速性產(chǎn)生影響。同時由公式(2)可以發(fā)現(xiàn)C=BA,即變形鏡各驅(qū)動器相對于H-S傳感器子孔徑的相對位置矩陣,會限制實驗器材在實際光路調(diào)試中的安裝位置。而在變論域模糊控制中只需要在波前重構之后確定波面評價指標P(n),不需要再對矩陣B進行標定。
經(jīng)過校正后,變形鏡第k次、第n個驅(qū)動器的輸出電壓為:
v(n)(k)=v0+Δv(n)(k)
(3)

(4)
公式(4)中e(n)(k)為第k次、第n個驅(qū)動器的波面評價指標P的殘差參數(shù),所有殘差參數(shù)記為e=[e(0)(k),e(1)(k),…,e(n)(k)]T。

即:
(5)

2.2 模糊論域及規(guī)則庫的設計
首先確定論域的選取范圍,包含輸入論域{e}和{ec}以及輸出論域{Kp}、{Ki}和{Kd},符號{·}表示集合。輸入論域的選取參考波面評價指標P的范圍,設定{e}和{ec}在模糊集合上的范圍分別為[-120,120]和[-6,6]。對于輸出論域的選取,當隸屬度為正負對稱時Kp、Ki和Kd通常需要設定初始值,而隸屬度為正分布時則不需要設定初始值[10],因此設定{Kp}、{Ki}和{Kd}在模糊集合上的范圍均為[0,1]。其次將模糊集合的范圍劃分為7個模糊子集,即負大(NB)、負中(NM)、負小(NS)、零(ZO)、正小(PS)、正中(PM)和正大(PB)[11]。模糊控制規(guī)則的設計要求如下:誤差較大時,控制參數(shù)傾向于快速減小誤差的效用;誤差較小時,控制參數(shù)在消除誤差的同時,還需要盡量避免系統(tǒng)振蕩、減小超調(diào)[12]。根據(jù)系統(tǒng)在受控過程中對應不同范圍的e和ec,建立合適的關于Kp、Ki、Kd的模糊邏輯語句:
1)If(eis NB)and(ecis NB)then(Kpis PB)(Kiis NB)(Kdis PS)
2)If(eis NB)and(ecis NM)then(Kpis PB)(Kiis NB)(Kdis NS)
3)If(eis NB)and(ecis NS)then(Kpis PM)(Kiis NM)(Kdis NB)
……
49)If(eis PB)and(ecis PB)then(Kpis NB)(Kiis PB)(Kdis PB)
最后選取高斯型(Gaussmf)函數(shù)構造如表1、表2、表3所示隸屬度分布的模糊規(guī)則表。
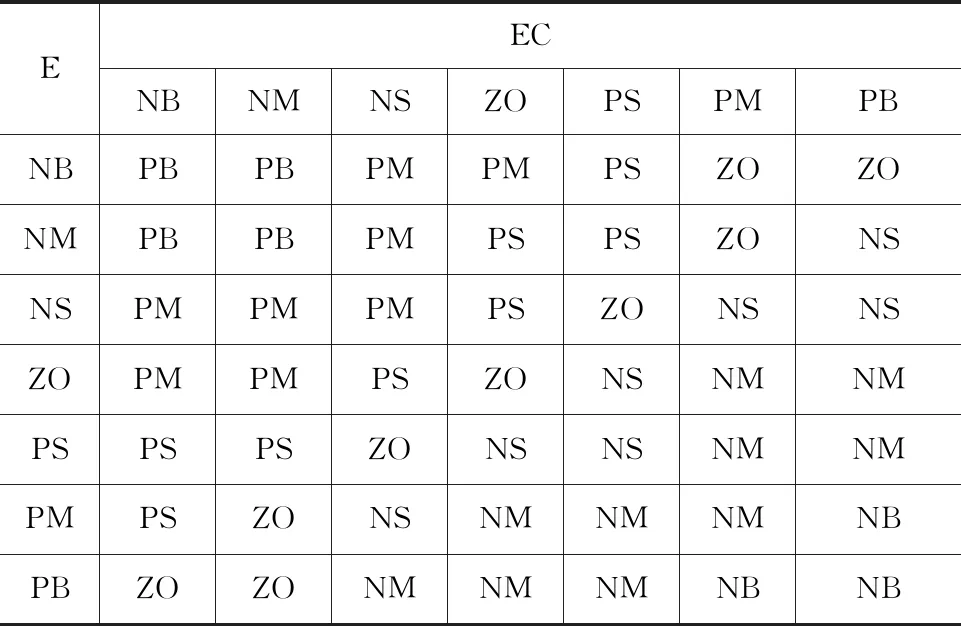
表1 Kp的模糊規(guī)則表
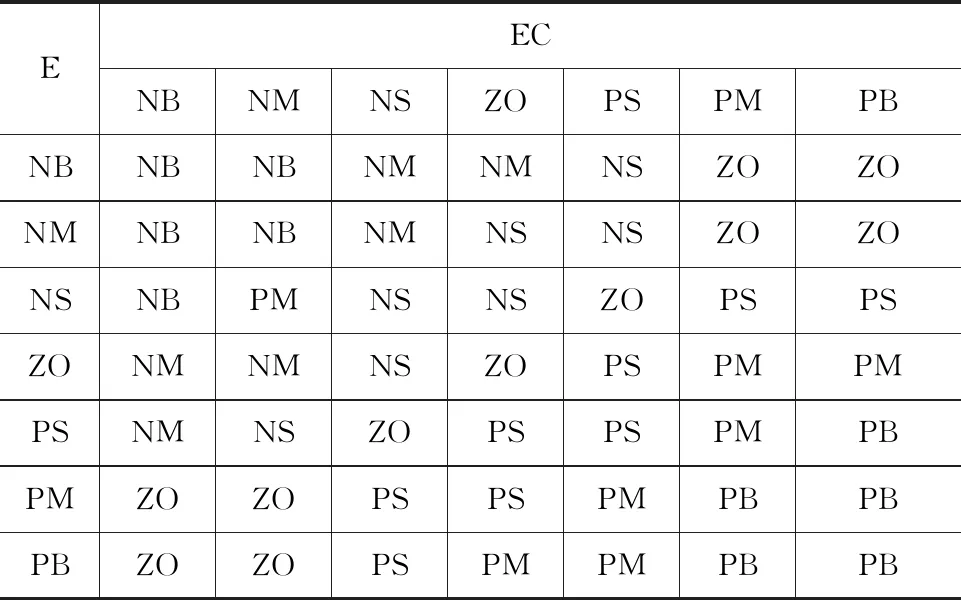
表2 Ki的模糊規(guī)則表
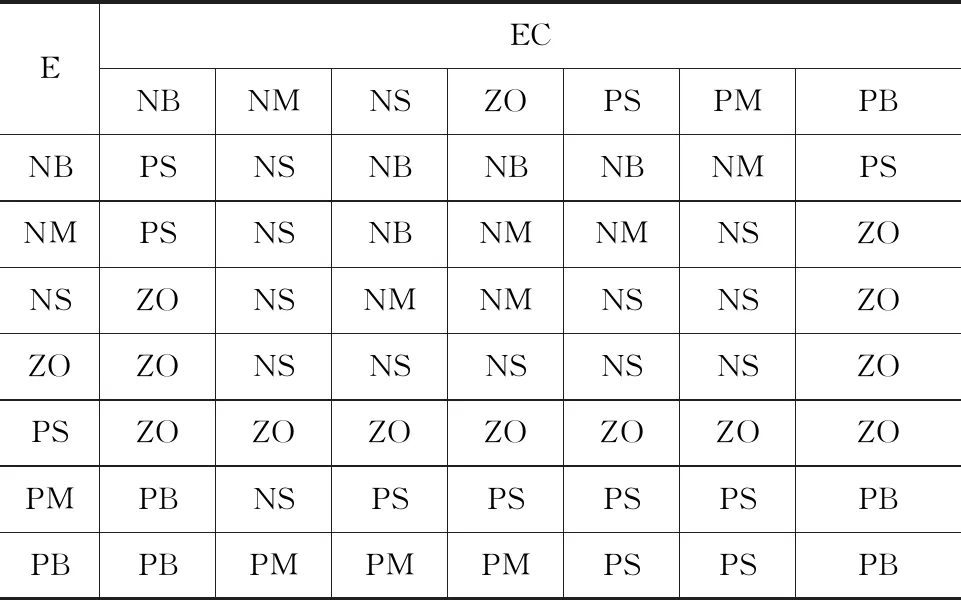
表3 Kd的模糊規(guī)則表
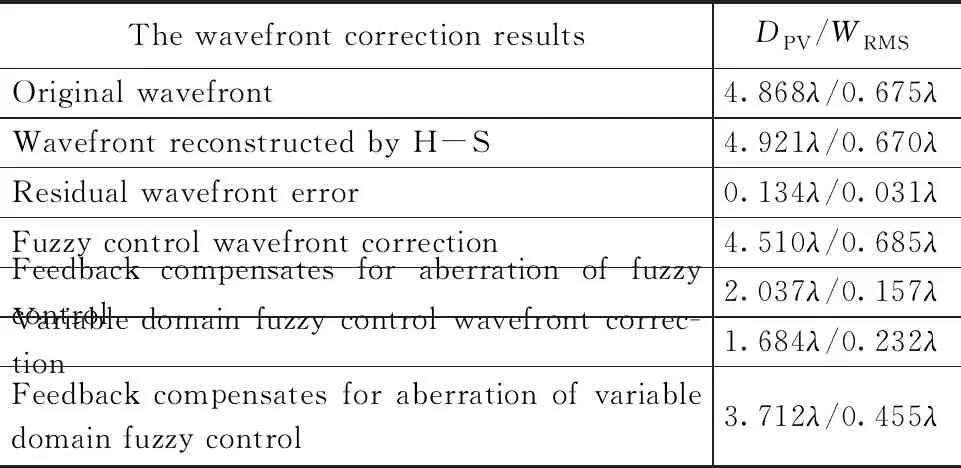
表4 波前校正結(jié)果評價指標
2.3 變論域模糊控制算法的設計
變論域模糊算法實質(zhì)上是在已有規(guī)則的模糊控制器的基礎上合理添加變論域調(diào)節(jié)因子,原本的論域范圍就會隨著誤差的變化而實時更新,進而將模糊規(guī)則庫轉(zhuǎn)變?yōu)楦屿`活的自適應規(guī)則庫。輸入變量為e,通過伸縮因子α(e)(α∈[0,1])將初始論域[-αE,αE])變換為[-α(e′)E,α(e′)E],如圖2所示,無論當論域膨脹還是壓縮,都相當于對控制規(guī)則進行實施調(diào)控,從而提高了控制系統(tǒng)的動態(tài)性能,最終達到提升控制精度的效果。
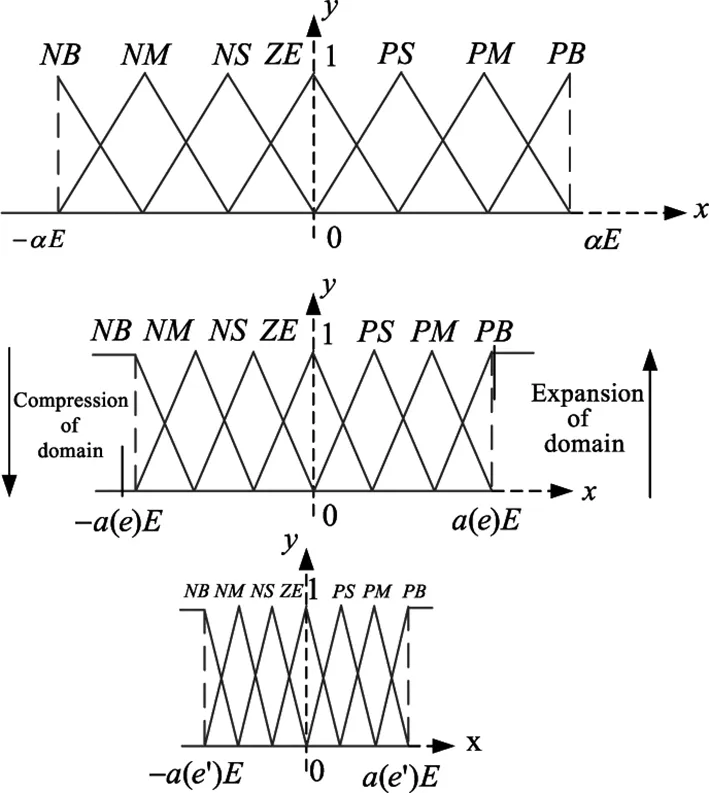
圖2 可變論域模糊控制規(guī)則變化圖
變論域調(diào)節(jié)因子使用函數(shù)法[13]來確定,模糊輸入變量的伸縮因子的算式為:
(6)
其中,e∈[-E,E]∈[-120,120],ec∈[-EC,EC]∈[-6,6],τ稱為伸縮因子系數(shù),0<τ1<1,0<τ2<1。將和e和ec分別用α、β表示,采用下述公式計算τ(x)的值:
τ(x)=1-ζe-kx2
(7)
則:
τ(α)=1-ζe-kα2
(8)
τ(β)=1-ζe-kβ2
(9)
其中,k稱為控制系統(tǒng)靈敏度系數(shù),k>0。在合理的范圍內(nèi)k值越大,論域伸縮的響應速度越快,系統(tǒng)的靈敏度也就越高。ζ稱為論域最小取值系數(shù),0<ζ<1。取k=10,ζ=0.1。
模糊輸出變量的伸縮因子的算式為:
(10)
式中,Q為比例常數(shù);T為采樣周期;P為常數(shù)向量;γ(0)為初始值。取Q=100,T=0.001,P=[1,1]T,γ(0)=1。
量化因子ke、kec和比例因子LKp、LKi、LKd的求解按照實際控制系統(tǒng)運行的動態(tài)范圍,[emin,emax]、[ecmin,ecmax]、[Δkmin(m),Δkmax(m)](m=p、i、d),使用論域正規(guī)化[13]變換公式:
(11)
(12)
(13)
2.4 清晰化處理
清晰化過程就是反模糊化的過程,使用重心法[14]可以達到使輸出更加平滑的目的。若ΔKp、ΔKi和ΔKd為經(jīng)過參數(shù)整定后的輸出量,則Kp、Ki和Kd的最終取值為:
(14)
式中,kp0、ki0、kd0為PID的初始值,均設定為零。在控制過程中,重復上述流程至輸出穩(wěn)定最終實現(xiàn)最優(yōu)的參數(shù)自整定。
3 實驗測試與結(jié)果分析
3.1 實驗設置
波前校正實驗中,模擬光源的波長為λ=589 nm,波前畸變由前20階Zernike多項式表示。H-S傳感器孔徑面陣為120×120,變形鏡驅(qū)動器數(shù)為49。為保證系統(tǒng)的魯棒性并提升系統(tǒng)響應的快速性,在波前校正實驗的基礎上,附加了系統(tǒng)性能對比實驗。
3.2 實驗結(jié)果對比
圖3為兩種模糊控制算法下波前校正的完整過程。模糊控制與變論域模糊控制校正后重構的波面分別為圖3(d)與圖3(f),波面峰谷值DPV和均方根值WRMS分別從4.510λ,0.685λ到1.684λ,0.232λ。圖4波前復原誤差的標準差MSTD由0.206 μm降至0.09 μm。
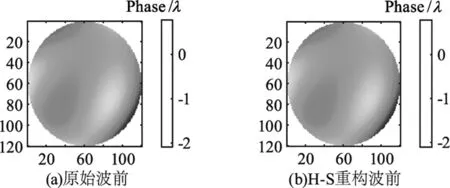
圖3 兩種算法的波前校正結(jié)果
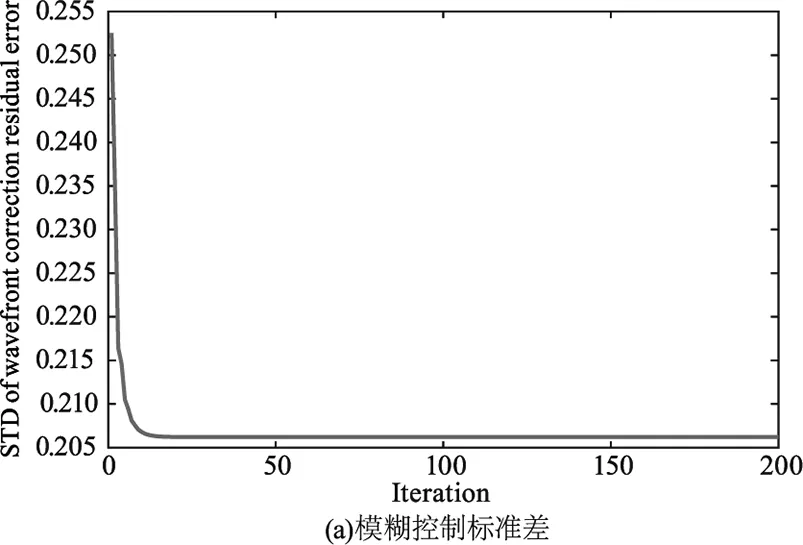
圖4 兩種算法波前校正殘余誤差的標準差
采用頻域分析的方法是證明系統(tǒng)性能的有效方法[15]。通過Simulink搭建模糊控制與變論域模糊控制對比仿真實驗模型,驗證系統(tǒng)對輸入信號的跟蹤性能,如圖5所示。輸入采樣時間為0.01 s,幅值為1 rad的階躍信號。模糊控制和變論域模糊控制的階躍響應曲線如圖6所示。兩條曲線的穩(wěn)態(tài)誤差均為0,通過表5中超調(diào)量、上升時間、調(diào)節(jié)時間和振蕩次數(shù)四個性能指標對比分析,模糊控制超調(diào)量大,振動次數(shù)多,調(diào)節(jié)時間長,充分證明變論域模糊控制具有良好的穩(wěn)態(tài)性能與快速的響應性能。
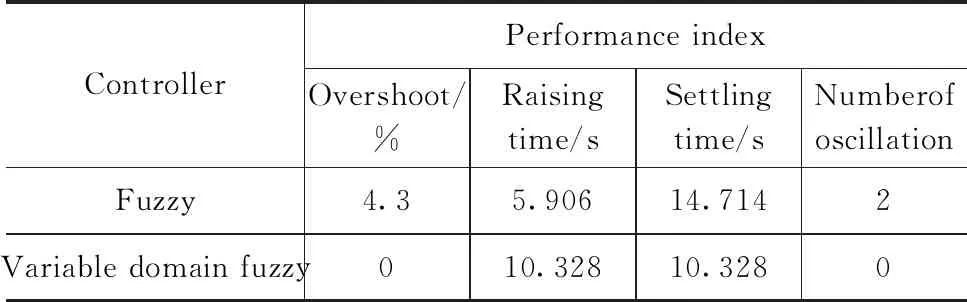
表5 兩種控制器的性能對比
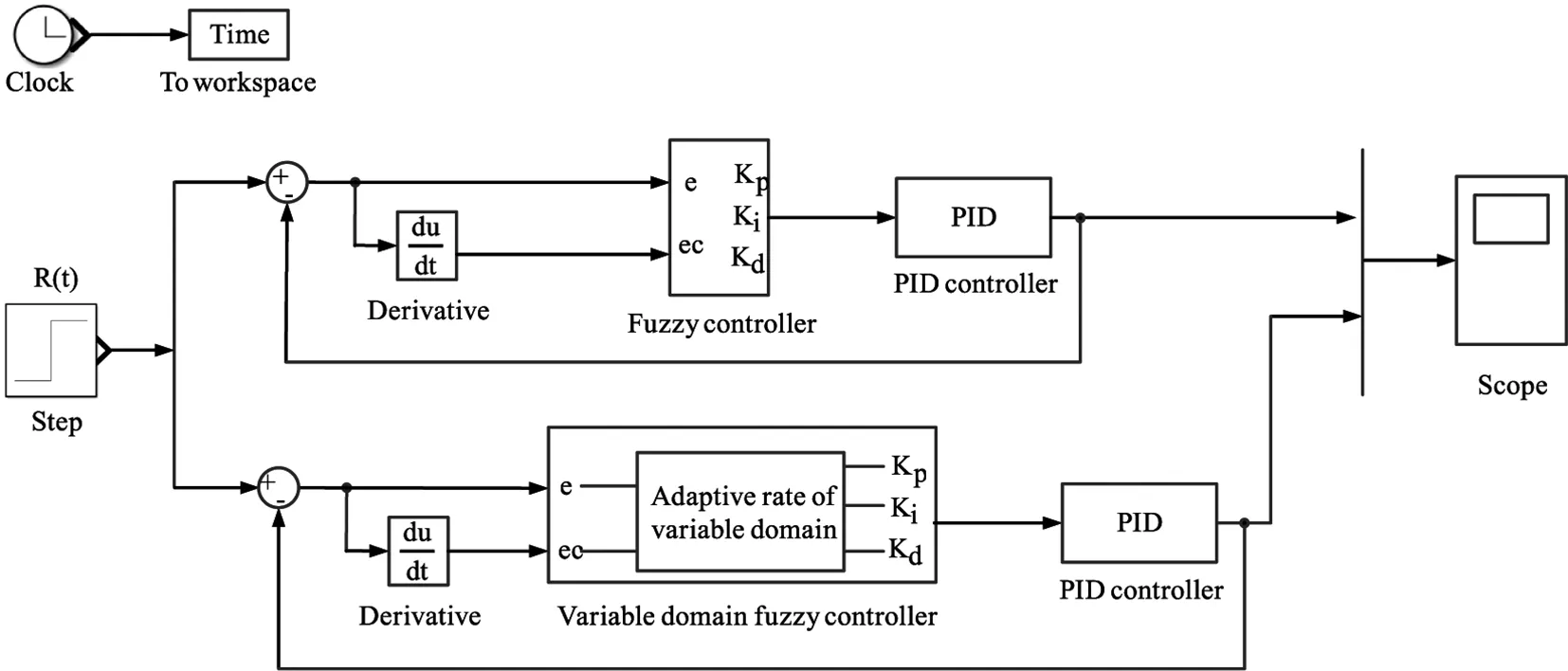
圖5 控制系統(tǒng)對比仿真實驗模型
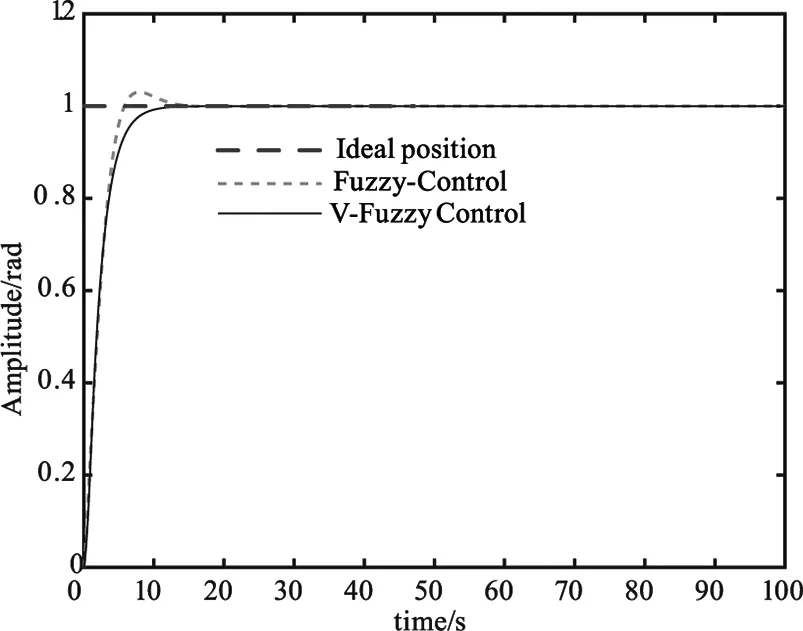
圖6 輸出的階躍響應曲線
4 結(jié) 論
波前校正的變論域模糊控制方法無需標定變形鏡的響應矩陣,降低了光路對準調(diào)試的難度。借助變論域的自整定特性,校正后的波面峰谷值和均方根值大約為常規(guī)模糊控制的50 %,可以更好地實現(xiàn)波前復原。變論域模糊控制器相比于常規(guī)模糊控制器,超調(diào)量幾乎為零,系統(tǒng)調(diào)節(jié)時間提前了大約33 %。變論域模糊控制方法在保證系統(tǒng)具有更高的魯棒性,提升系統(tǒng)的快速性的同時,利用參數(shù)自整定的特性克服了擾動因素對變形鏡響應模型造成的不利影響,增強系統(tǒng)校正的適應能力,縮短了系統(tǒng)的響應時間,提高了校正效率與準確度,對于波前校正更具有實用性。目前已經(jīng)通過仿真證明波前校正的變論域模糊控制方法具有優(yōu)勢,下一步工作需要利用儀器設備繼續(xù)進行算法的優(yōu)化。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數(shù)學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
中華詩詞(2020年1期)2020-09-21 09:24:52
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
Coco薇(2017年11期)2018-01-03 20:59:57
中學生數(shù)理化·七年級數(shù)學人教版(2017年11期)2017-04-23 07:18:00
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
數(shù)學大王·中高年級(2016年12期)2016-12-26 21:37:36