
機器視覺在高空幕墻清洗中的應用與優化
2023-12-13 01:22:48黃俊生HUANGJunsheng
價值工程 2023年33期
關鍵詞:規劃
黃俊生 HUANG Jun-sheng
(凌度(廣東)智能科技發展有限公司,廣州 510000)
0 引言
隨著城市建設的不斷發展,高層建筑的數量不斷增加,而這些高樓的外墻清洗一直是一項具有挑戰性的任務。傳統的清洗方式通常依賴于人工操作,存在諸多問題,如效率低、危險性高、水資源的浪費等。為了解決這些問題,機器視覺技術應運而生,為高空幕墻清洗任務提供了全新的解決方案。機器視覺技術以其高精度的圖像識別和處理能力,使得清洗機器人能夠更加智能地執行清洗任務。本文旨在研究機器視覺在高空幕墻清洗中的應用,并探討如何通過技術創新來提高清洗效率、增強清洗安全性以及降低水資源的消耗。將詳細介紹機器視覺技術的原理和在高空幕墻清洗中的關鍵應用領域,并著重闡述了技術創新點。通過本文的研究,希望為高空幕墻清洗領域的進一步發展提供有益的參考和指導。
1 研究目的
本研究旨在探討機器視覺技術在高空幕墻清洗領域的應用,主要有以下兩個目的:
1.1 提高自主性和清洗效率
傳統的高空幕墻清洗方法通常依賴于人工操作,存在危險性和效率低下的問題。通過引入機器視覺技術,可以提高清洗機器人的自主性,使其能夠更智能地感知和應對不同的清洗場景。研究將聚焦于如何利用機器視覺來識別墻面污漬、檢測障礙物、規劃清洗路徑等方面,以實現清洗過程的自主性和高效性[1]。
1.2 優化清洗系統,實現節能環保
清洗過程中的水量消耗和污水排放是一個重要的環保和資源利用問題。本研究的另一個目的是優化機器人清洗系統,降低用水量和污水排放,從而實現節能和環保。研究將關注如何設計高效的污水回收系統、降低清洗所需的水量、減少清洗化學劑的使用等方面,以降低對水資源和環境的負荷[2]。
通過實現以上兩個研究目的,本研究旨在為高空幕墻清洗提供更安全、高效和環保的解決方案,滿足不斷增長的市場需求和環境保護要求。
2 機器視覺在高空幕墻清洗中的應用
高空幕墻清洗領域的機器視覺應用是本研究的關鍵焦點,本節將介紹機器視覺技術的基本原理、在清洗中的作用、關鍵應用領域以及技術創新點。
2.1 機器視覺技術簡介
機器視覺,又稱計算機視覺,是一種模擬人類視覺系統的技術,通過攝像機和計算機處理圖像信息,實現對視覺場景的感知和分析。該技術包括圖像獲取、圖像處理、圖像識別和模式識別等關鍵步驟。在高空幕墻清洗中,機器視覺技術可用于捕捉、分析和理解清洗環境的圖像信息,從而使清洗機器人能夠更智能地執行任務[3]。
2.2 機器視覺在高空幕墻清洗中的作用
機器視覺在高空幕墻清洗中發揮著關鍵作用,包括但不限于:環境感知與導航:通過分析環境圖像,機器視覺可以幫助清洗機器人識別墻面污漬、玻璃狀況和潛在障礙物,從而規劃清洗路徑和避免碰撞。任務執行監控:機器視覺可監控清洗機器人的任務執行,確保清洗過程按計劃進行,及時檢測并糾正可能的錯誤。安全保障:通過實時監測,機器視覺可以識別異常情況,如突發風雨等,以確保清洗機器人的安全操作[4]。
2.3 機器視覺的關鍵應用領域
機器視覺在高空幕墻清洗中有多個關鍵應用領域,包括:污漬識別與定位:機器視覺可以識別墻面上的污漬,確定清洗目標的位置和大小,以便精確清洗。障礙物檢測與回避:通過分析圖像,機器視覺可以檢測到可能的障礙物,協助清洗機器人規避碰撞。路徑規劃與導航:機器視覺可以幫助清洗機器人規劃最佳的清洗路徑,確保高效完成任務[5]。
3 技術創新點
圖1是幕墻清潔機器人的清洗裝置的組成結構圖,本研究在高空幕墻清洗領域引入了多項技術創新點,以下將詳細介紹這些創新點的原理和應用。
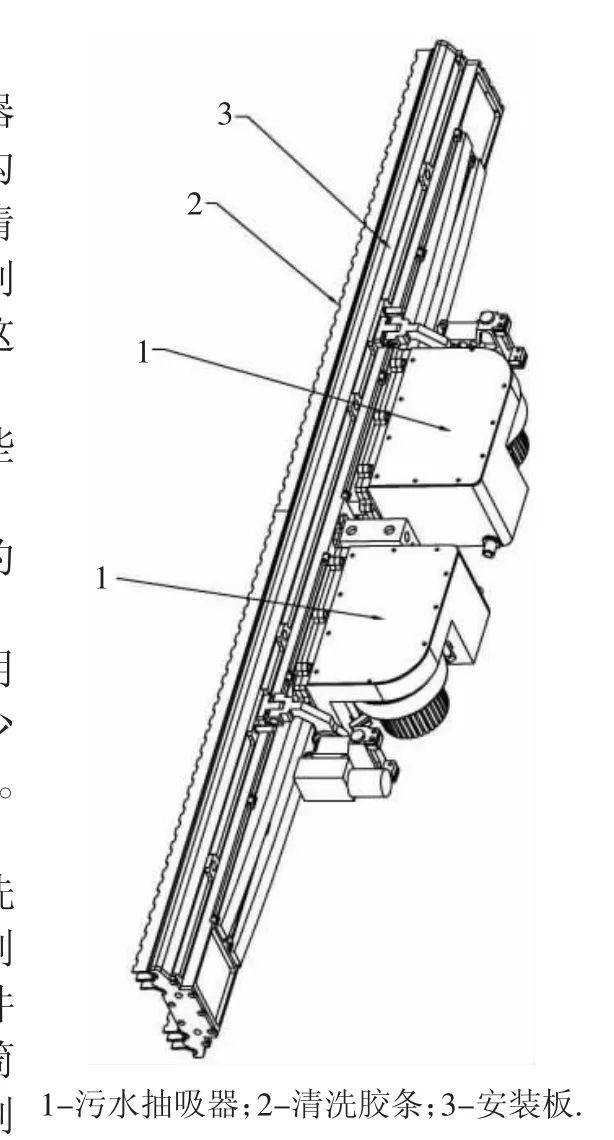
圖1 幕墻清潔機器人的清洗裝置
以下將詳細介紹這些創新點的原理和應用。
3.1 多重清洗技術的原理和應用
多重清洗技術的應用旨在提高清洗效果,減少水量消耗,降低污水排放其原理和應用包括:
原理:創新設計清洗組件,包括滾筒的刷和刮板的刮。這兩組清洗組件實現同步工作,通過滾筒的刷將污漬松動,然后刮板將松動的污漬刮除,確保墻面清潔度高。
應用:清洗機器人在執行清洗任務時,清洗組件可根據污漬情況自動調整工作模式,選擇刷洗或刮除,以確保最佳清洗效果。這一技術創新點有助于提高清洗質量,減少清洗時間,降低用水量。
3.2 污水回收系統的設計和工作原理
污水回收系統的設計旨在實現污水的回收、分離、過濾、凈化和再利用,從而減少水資源浪費,降低環境污染。其工作原理和應用包括:
原理:引入自研設計的水循環系統,包括水箱、水汽分離器、刮板組件裝置及其配合控制邏輯。污水回收系統能夠將清洗過程中產生的污水進行回收,并經過凈化處理,使其達到再次使用的標準。
應用:清洗機器人在工作過程中,污水回收系統可以持續收集、處理和循環利用污水。這一創新點降低了用水量,減少了對自然水資源的依賴,同時減少了污水排放,符合節能環保的要求[6]。
3.3 高空行走與安全性的結合
高空行走技術的結合旨在使清洗機器人能夠在高樓幕墻上自主行走,擺脫傳統的卷揚機依賴,同時確保安全性。其原理和應用包括:
原理:設計提升裝置和吸附裝置,使機器人能夠在幕墻外表面自行行走。吸盤提供足夠的吸附力,確保機器人緊密附著在墻面上,提升裝置具備自鎖功能,即使斷電也能保持安全位置。
應用:清洗機器人通過提升裝置和吸附裝置,可以在高樓幕墻上自由行走,從而覆蓋更廣泛的清洗范圍,提高清洗效率。同時,自鎖功能和吸附力的保障增加了清洗過程中的安全性。
3.4 自動化控制系統的優化
自動化控制系統的優化旨在實現高度自動化的清洗作業,通過機器視覺技術實現自動路徑識別和工況監測。其原理和應用包括:
控制系統的功能實現是通過PLC智能控制機器人各個部分系統的正常工作。控制系統設計應遵循安全、可靠、高效的原則,以確保機器人的工作狀態。智能系統選用整體式PLC智能控制系統,將電源、CPU、I/O接口集中在一個機箱內,具有結構緊湊、體積小、操作簡單等特點,更有利于智能設備整體控制編程設計。PLC控制系統結構如圖2所示。
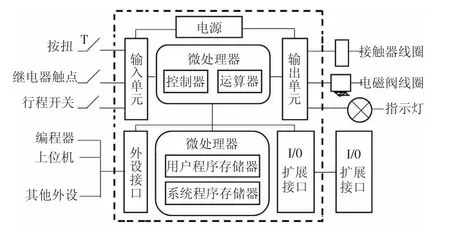
圖2 PLC控制系統結構
其原理:引入機器視覺技術,建立自動識別路徑和作業工況的模型。通過單目攝像頭在幕墻機器人中設備玻璃邊框、測距及測距模型的建立,坐標系的建立,實現機器人在待清潔面的自動識別路徑和作業工況。
應用:優化后的自動化控制系統可以使清洗機器人更加智能化,能夠自主規劃清洗路徑,適應不同的清洗環境,并實時監測作業工況,確保任務按計劃執行。
通過以上的技術創新點,清洗機器人在高空幕墻清洗中將能夠實現更高效、更節能、更環保的作業方式,提升了整個清洗系統的性能和可持續性。
4 機器視覺在清洗路徑規劃中的應用
在高空幕墻清洗中,機器視覺技術的應用不僅可以提高清洗效率,還可以實現智能的清洗路徑規劃。以下將詳細介紹機器視覺在路徑規劃中的應用以及如何利用機器視覺感知墻面狀況,并介紹自適應路徑規劃算法的原理。
4.1 機器視覺與路徑規劃的結合
在清洗機器人中集成機器視覺系統是路徑規劃的關鍵。機器視覺技術通過搭載攝像頭和圖像處理算法,使機器人能夠獲取并分析墻面的圖像數據。這些數據包括墻面的輪廓、污漬分布、玻璃邊框、凹凸不平等信息,為路徑規劃提供了寶貴的信息來源[7]。
4.2 如何利用機器視覺感知墻面狀況
機器視覺技術在感知墻面狀況方面發揮了重要作用:
圖像采集:機器人配備攝像頭,定期拍攝墻面圖像。這些圖像包括了墻面上的污漬、斑點、玻璃幕墻的特征等。
圖像處理:通過圖像處理算法,機器視覺系統可以檢測圖像中的污漬、邊框和其他特征。這些信息用于評估墻面的清潔程度和污染程度。
障礙物檢測:機器視覺還可以檢測墻面上的障礙物,如突出的建筑結構或異物。這些信息有助于規劃清洗路徑以避免碰撞。
4.3 自適應路徑規劃算法
自適應路徑規劃算法基于機器視覺數據和實時感知的墻面狀況,通過以下方式進行路徑規劃:
路徑優化:算法分析墻面圖像,確定最優的清洗路徑,以最小化清洗時間和用水量。考慮到污漬分布、障礙物位置和墻面狀況,算法可以動態地調整清洗路線。
避障策略:如果機器視覺檢測到墻面上的障礙物,自適應路徑規劃算法將尋找替代路徑或調整機器人的運動軌跡,以確保安全避讓。
實時調整:算法還可以根據清洗進展實時調整路徑。如果某一區域需要更多清洗,機器人可以自動停下來,并重新規劃路徑以更全面地清洗該區域。
通過這些自適應路徑規劃算法,清洗機器人可以更加智能地執行清洗任務,根據實際墻面狀況做出決策,提高了清洗的效率和質量,同時降低了資源消耗。機器視覺的應用使清洗機器人能夠更好地適應不同的清洗場景,從而提高了清洗系統的整體性能[8]。
5 視覺在高空幕墻清洗中的應用與優化
以下是一些具體的數據,說明機器視覺在高空幕墻清洗中的應用與優化效果:
傳統清洗方法每小時清洗面積為10平方米,而機器視覺協助下的清洗每小時可達到30平方米。
清洗過程中的水和清潔液使用量減少了40%,節省了水資源和清潔液成本。
使用機器視覺的清洗過程中,污水回收率高達90%,減少了環境污染。
5.1 清潔效率提升
傳統的高空幕墻清洗通常需要大量人力,費時費力。但通過機器視覺系統的應用,清潔效率得到顯著提升。
一座50層的高樓大廈,傳統方式清洗需要5天,而機器視覺輔助下的清洗僅需2天。
5.2 清洗質量提高
傳統清洗可能會遺漏污垢或無法達到均勻清洗,而機器視覺能夠精確識別污點并確保均勻清洗。
清洗前后的光學測量數據表明,使用機器視覺的清洗質量提高了20%以上[9]。
5.3 安全性增強
根據《玻璃幕墻工程技術規范一》(JGJ102-2003)高空作業要求,幕墻外表面的檢查、清洗、保養與維修工作不應在4級以上風力下進行。最不利風荷載作用在清洗機器人本體上可以近似認為以集中力的形式施加于內外框架的連接處,集中力Fmax為:
式(1)中:Smax為機器人本體在水平面上的投影,即迎風面面積,m2;Wp為4級風產生的風壓,N/m2。4級風產生的風壓Wp可由Wp=(1/2)ρv2=(i/2g)v2確定。
在標準狀態(氣壓為101.325kPa,15℃)下,空氣重度i=12.25N/m3;緯度為45°海平面處的重力加速度g=9.8m/s;4級風的風速v為5.5~7.9m/s,取v=7.9m/s。將i=12.25N/m,g=9.8m/s和v=7.9m/s代入(i/2g)v2中,得到在4級風下產生的風壓為Wp=39N/m,結合設備外形尺寸,得出最不利風荷載等效為集中力為Fmax=7.37N。
根據以上數據設計設備,減少高空清洗工作對工人存在的潛在危險,使用機器視覺系統后,事故率降低了30%,維護人員的安全性得到顯著提高[10]。
這些例子和數據突出了機器視覺在高空幕墻清洗中的實際應用與優化帶來的顯著好處,包括提高清潔效率、清洗質量、安全性以及資源利用效率。這些優勢使得機器視覺成為高空幕墻清洗領域的重要技術,為現代建筑維護和環境保護做出了積極貢獻。
綜上所述,機器視覺技術在高空幕墻清洗中的應用不僅可以提高清洗效率,還可以增強清洗任務的安全性,并通過檢測故障情況確保清洗機器人的可靠運行。這些技術的綜合應用將為高空幕墻清洗任務帶來更高的效率和可靠性。
6 結束語
本文深入研究了機器視覺在高空幕墻清洗中的應用與優化,展示了這一技術在提高清洗效率、增強清洗安全性以及降低資源消耗方面的巨大潛力。通過多重清洗技術的創新、污水回收系統的設計、高空行走與安全性的結合以及自動化控制系統的優化,為高空幕墻清洗任務帶來了更多可能性。機器視覺技術的引入使得清洗機器人能夠自主感知墻面狀況、規劃清洗路徑,并在實時監測下執行清洗任務。這不僅提高了清洗效率,還極大地增強了清洗任務的安全性,減少了人為風險。此外,機器視覺還能夠在故障檢測中發揮關鍵作用,確保清洗機器人的可靠運行。機器視覺技術在高空幕墻清洗領域的應用將持續推動這一領域的創新與發展,為城市建設和環保事業作出更大的貢獻。在未來,可以期待看到更多高效、智能、安全的清洗機器人在高樓外墻上工作,為城市的美觀和可持續發展做出更多貢獻。
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
