基于多星座GNSS的高軌航天器組合導(dǎo)航性能評(píng)估
2023-12-15 08:51:12謝禮偉武領(lǐng)華莊學(xué)彬
無線電工程 2023年12期
謝禮偉,石 濤,武領(lǐng)華,莊學(xué)彬
(中山大學(xué) 系統(tǒng)科學(xué)與工程學(xué)院,廣東 廣州 510006)
0 引言
近年來,高軌航天器的發(fā)射次數(shù)、應(yīng)用服務(wù)和任務(wù)類型逐漸增多,高軌航天器利用全球?qū)Ш叫l(wèi)星系統(tǒng)定位是GNSS的重要應(yīng)用之一[1]。由于GNSS導(dǎo)航衛(wèi)星最初設(shè)計(jì)主要是為地面用戶服務(wù),導(dǎo)航衛(wèi)星的信號(hào)基本都指向地球中心,而高軌航天器的軌道高度遠(yuǎn)大于GNSS衛(wèi)星運(yùn)行軌道高度,因而高軌航天器接收機(jī)只能接收到來自地球另一端的信號(hào),這使得導(dǎo)航衛(wèi)星與高軌航天器之間的距離進(jìn)一步增加,來自路徑和大氣的損耗導(dǎo)致接收信號(hào)的信噪比大幅度降低[2]。 即使高軌航天器可見衛(wèi)星滿足多GNSS定位解算條件,定位誤差也可高達(dá)百米量級(jí)。對(duì)于太空中處于零重力環(huán)境下的高軌航天器,在非機(jī)動(dòng)狀態(tài)下可通過軌道積分遞推直接獲得其短期位置,但其誤差均低于GNSS定位結(jié)果,因而高軌道航天器通常采取軌道濾波的形式進(jìn)行定軌計(jì)算并利用GNSS的偽距、偽距率等信息對(duì)軌道參數(shù)進(jìn)行修正[3]。
隨著北斗三號(hào)全球衛(wèi)星導(dǎo)航系統(tǒng)正式向用戶提供全天時(shí)、全天候、高精度的全球定位導(dǎo)航服務(wù),全球有超過120顆能夠提供導(dǎo)航服務(wù)的在軌衛(wèi)星,大量的在軌衛(wèi)星為高軌航天器定位技術(shù)的發(fā)展奠定了良好的基礎(chǔ),同時(shí)利用多星座GNSS可以提高可見衛(wèi)星數(shù),從而有效改善高軌自主定位服務(wù)的可用性[4]。對(duì)于機(jī)動(dòng)模式下的航天器,可利用加速度計(jì)和陀螺儀獲得的加速度數(shù)據(jù)信息來推算出航天器的短期運(yùn)動(dòng)狀態(tài)。慣性測量單元 (Inertial Measurement Unit,IMU) 的采樣頻率遠(yuǎn)高于GNSS接收機(jī)且短期內(nèi)誤差低于GNSS定位誤差,因此捷聯(lián)慣性系統(tǒng) (Strapdown Inertial Navigation System,SINS)通常作為實(shí)時(shí)輸出航天狀態(tài)信息的主要系統(tǒng)。由于IMU 的噪聲以及長期積分會(huì)導(dǎo)致誤差累積,因此常采用GNSS 導(dǎo)航或天文導(dǎo)航來校正SINS的參數(shù)[5]。
高精度自主定位是高軌航天器的核心關(guān)鍵技術(shù),多星座GNSS的在軌衛(wèi)星數(shù)量多、衛(wèi)星所在軌道分布廣,且高軌道用戶終端和導(dǎo)航衛(wèi)星相對(duì)動(dòng)態(tài)關(guān)系變化快,對(duì)導(dǎo)航性能的可用性提出了較大的挑戰(zhàn)。基于以上因素,本文首先對(duì)多星座GNSS和北斗三號(hào)星座構(gòu)型進(jìn)行簡要介紹,然后對(duì)高軌航天器的定位系統(tǒng)誤差狀態(tài)進(jìn)行推導(dǎo)以確定衛(wèi)星導(dǎo)航與慣性導(dǎo)航緊組合的狀態(tài)觀測模型,最后通過仿真對(duì)比結(jié)果證明,超同步轉(zhuǎn)移軌道(Super-Synchronous Transfer Orbit, SSTO)典型高軌航天器應(yīng)用高軌緊組合算法可獲得較穩(wěn)定的定位信息和更高的定位精度。
1 多星座GNSS
與單個(gè)衛(wèi)星系統(tǒng)相比,多星座組合可以增加可見衛(wèi)星的數(shù)量,有效改善衛(wèi)星的空間幾何結(jié)構(gòu),提高衛(wèi)星定位的可靠性[6]。
1.1 多星座系統(tǒng)時(shí)間融合
由于BDS、GPS、Galileo、GLONASS四個(gè)系統(tǒng)時(shí)間都與協(xié)調(diào)世界時(shí) (UTC) 相關(guān),將其他3個(gè)系統(tǒng)的時(shí)間都統(tǒng)一為GPST,從而完成多星座時(shí)間數(shù)據(jù)的融合。根據(jù) GPS 接口控制文件中的內(nèi)容,GPST、GLONASST 的時(shí)間基準(zhǔn)可以用下式進(jìn)行轉(zhuǎn)換[7]:
(1)

tGPS-tGALILEO≈19 s±30 ns。
(2)
根據(jù)BDS接口控制文件內(nèi)容,BDT和GPST的時(shí)間基準(zhǔn)可以用下式進(jìn)行轉(zhuǎn)換:
(3)
(4)
式中:tBDS是北斗時(shí)間,A0GPS是2個(gè)系統(tǒng)之間的鐘差,A1GPS是2個(gè)系統(tǒng)的鐘速差。
1.2 北斗三號(hào)星座構(gòu)型
北斗三號(hào)系統(tǒng)的空間星座由 3 顆地球靜止軌道(Geostationary Earth Orbit, GEO)衛(wèi)星、3顆傾斜地球同步軌道(Inclined GeoSynchronous Orbit, IGSO)衛(wèi)星和24 顆中圓地球軌道(Medium Earth Orbit, MEO)衛(wèi)星混合組成[8],如圖1所示。
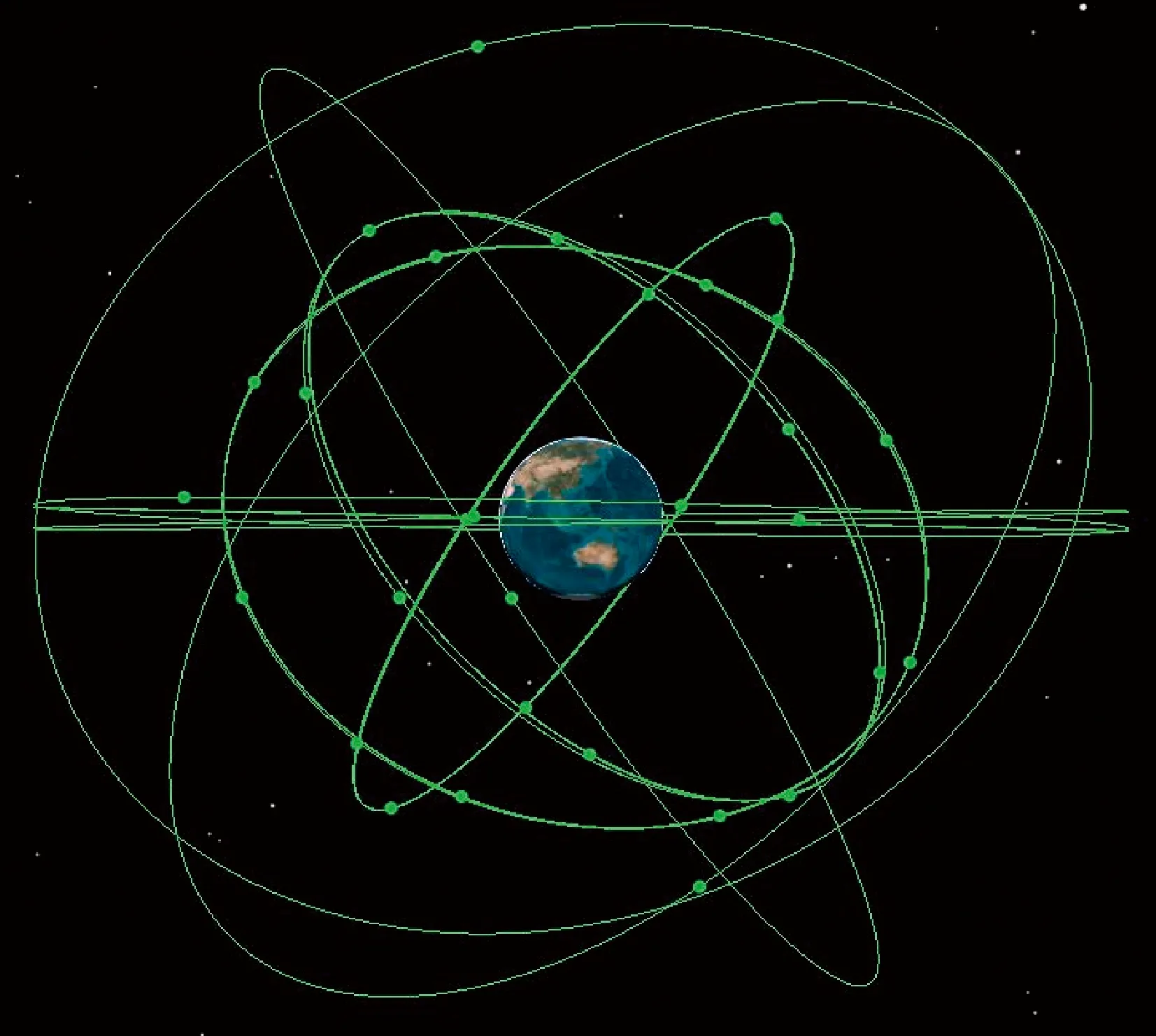
圖1 三維空間結(jié)構(gòu)Fig.1 Three-dimensional spatial structure
GEO衛(wèi)星的軌道面與地球赤道面重合,星下點(diǎn)相對(duì)地面基本保持靜止;IGSO衛(wèi)星與GEO衛(wèi)星的軌道高度相同,位于3個(gè)軌道面上,星下點(diǎn)相對(duì)地面自南向北運(yùn)動(dòng),軌跡呈現(xiàn)“8字型”;MEO衛(wèi)星星下點(diǎn)相對(duì)地面自西向東運(yùn)動(dòng),軌跡呈現(xiàn)“波浪型”。GEO和IGSO衛(wèi)星的使用可以大大提高北斗系統(tǒng)的導(dǎo)航性能和抗遮擋能力,而MEO衛(wèi)星可為北斗系統(tǒng)服務(wù)全球打下堅(jiān)實(shí)的基礎(chǔ),提高系統(tǒng)的可靠性和魯棒性[9]。
2 定位系統(tǒng)模型
針對(duì)高軌多GNSS連續(xù)定位解算難以保障問題,基于偽距、偽距率的高軌緊組合定位算法對(duì)高軌航天器的系統(tǒng)誤差狀態(tài)進(jìn)行推導(dǎo),確定衛(wèi)星導(dǎo)航與慣性導(dǎo)航緊組合的系統(tǒng)誤差狀態(tài)模型。
2.1 緊組合模型
緊組合是一種相對(duì)復(fù)雜的組合方式,如圖2所示。在該組合方式中,GPS和IMU僅作為測量傳感器,利用IMU輸出的位置和速度信息來估計(jì)GPS的偽距和偽距率,并將其與GPS定位原始信息進(jìn)行比較。觀測方程經(jīng)過卡爾曼濾波以獲得準(zhǔn)確的導(dǎo)航解。
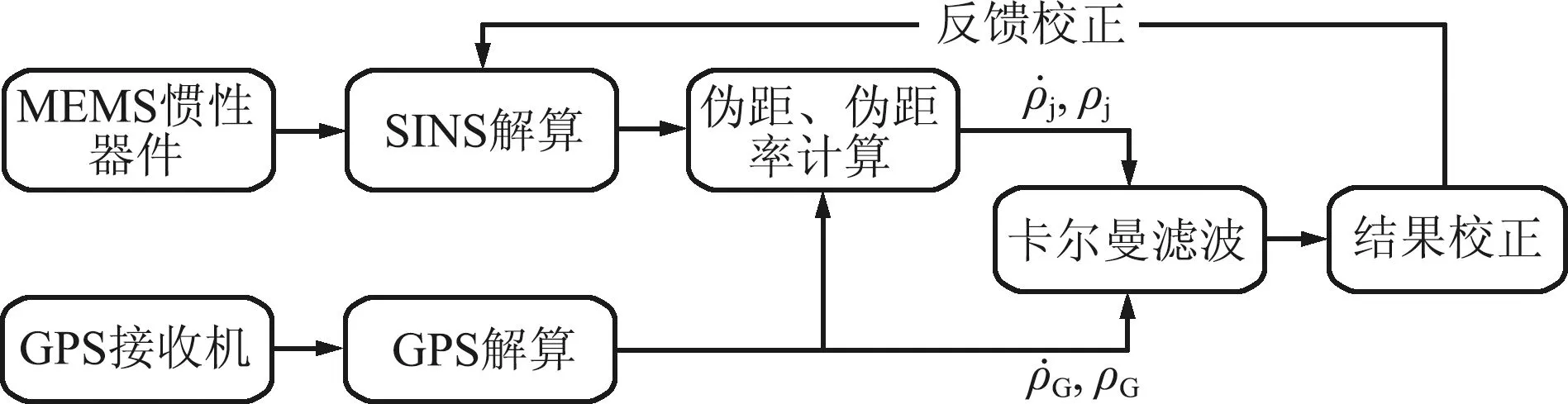
圖2 緊組合模型Fig.2 Tight combination model
相對(duì)而言,緊組合導(dǎo)航系統(tǒng)具有更高的導(dǎo)航解算精度。 同時(shí),即使載體移動(dòng)或受到外部信號(hào)干擾,緊組合導(dǎo)航系統(tǒng)也能執(zhí)行GPS信息有限環(huán)境下的導(dǎo)航方案,避免組合導(dǎo)航系統(tǒng)退化成純慣性導(dǎo)航系統(tǒng),并且使用偽距、偽距率或載波相位等同級(jí)信息來修正慣性導(dǎo)航系統(tǒng)對(duì)可見星數(shù)的要求較低,不需要接收機(jī)先單獨(dú)完成解算,因此緊組合方式具有更好的實(shí)現(xiàn)效果[10]。下文將基于高軌航天器采用多星座導(dǎo)航系統(tǒng)/慣導(dǎo)緊組合方法進(jìn)行定位性能仿真和評(píng)估。
2.2 高軌航天器運(yùn)動(dòng)狀態(tài)的誤差狀態(tài)模型
對(duì)于高軌航天器,其運(yùn)動(dòng)狀態(tài)可用位置、速度、加速度零偏、角速度零偏和姿態(tài)進(jìn)行描述,分別用pi、vi、ab、ωb和θbi表示,其中上角標(biāo)i代表該值在i系中的矢量值,b則代表機(jī)體b系,θbi為機(jī)體b系旋轉(zhuǎn)至i系的旋轉(zhuǎn)矢量(簡寫為θ)。
將系統(tǒng)狀態(tài)的誤差值作為ESKF系統(tǒng)狀態(tài)空間向量:
δX=[δpT,δvT,δθT,δaT,δωT,δbT,δd]T。
(5)
系統(tǒng)誤差狀態(tài)維數(shù)為20。將所有誤差項(xiàng)利用泰勒展開并略去二階以上高階項(xiàng),進(jìn)行線性化后得到誤差狀態(tài)的微分方程為:
(6)
(7)
(8)
(9)
(10)
(11)
(12)
因而,誤差狀態(tài)方程為:
(13)
此時(shí)可以得到ESKF的預(yù)測公式中狀態(tài)轉(zhuǎn)移矩陣為:
(14)
式中:F33=RT{(ωm-ωb)}×。根據(jù)系統(tǒng)噪聲W的定義得到ESKF更新式中的協(xié)方差矩陣為:
(15)
2.3 系統(tǒng)觀測模型
對(duì)于ESKF來說,需要額外的觀測信息對(duì)濾波器進(jìn)行矯正,在緊組合模型中選取偽距與偽距率作為觀測值。接收機(jī)偽距觀測方程為:
(16)
式中:T表示矩陣轉(zhuǎn)置,ρj表示當(dāng)前第j顆可見星,pj表示該衛(wèi)星坐標(biāo)(i系),p為當(dāng)前接收機(jī)坐標(biāo)(由于忽略了桿臂誤差,等效為航天器坐標(biāo)),nρ為對(duì)所有衛(wèi)星相同的白噪聲。
從而,觀測方程寫成:
δZ=HδX+V。
(17)
若當(dāng)前觀測到n顆衛(wèi)星,則有:
(18)
式中:衛(wèi)星編號(hào)為1~n。由于當(dāng)觀測到的n顆衛(wèi)星可能來自4個(gè)不同系統(tǒng),其量測矩陣寫為:
(19)
式中:Bj(j=1,2,…,n)為1×4維第j顆衛(wèi)星時(shí)鐘偏差分配矩陣,根據(jù)衛(wèi)星所屬系統(tǒng)不同分別取對(duì)應(yīng)列為1,其余列為0。匯總標(biāo)稱狀態(tài)與誤差狀態(tài)更新過程,系統(tǒng)運(yùn)動(dòng)狀態(tài)的更新流程如圖3[13]所示。
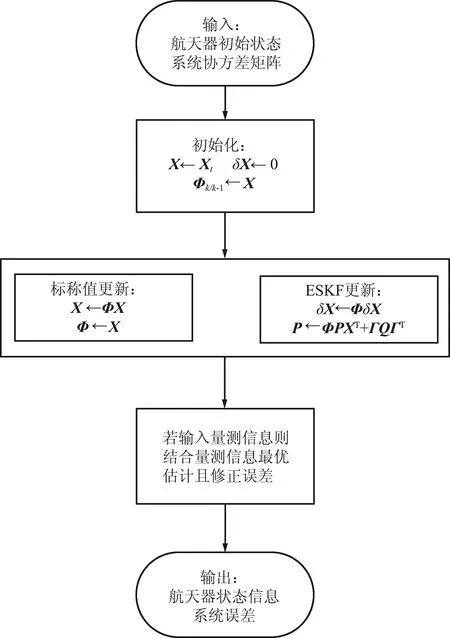
圖3 航天器狀態(tài)更新流程Fig.3 Update process of spacecraft status
3 高軌選星算法
典型高軌可見星分布普遍較差,僅依靠幾何分布進(jìn)行衛(wèi)星選擇不大適用于高軌多GNSS定位,選星算法旨在提升高軌航天器多GNSS定位時(shí)的性能。
3.1 PGA
目前,并行遺傳算法(Parallel Genetic Algorithm,PGA)是一種基于不同種群并行優(yōu)化的遺傳算法,如圖 4所示,主要有3種模型:主從模型、粗粒度模型和細(xì)粒度模型[14]。
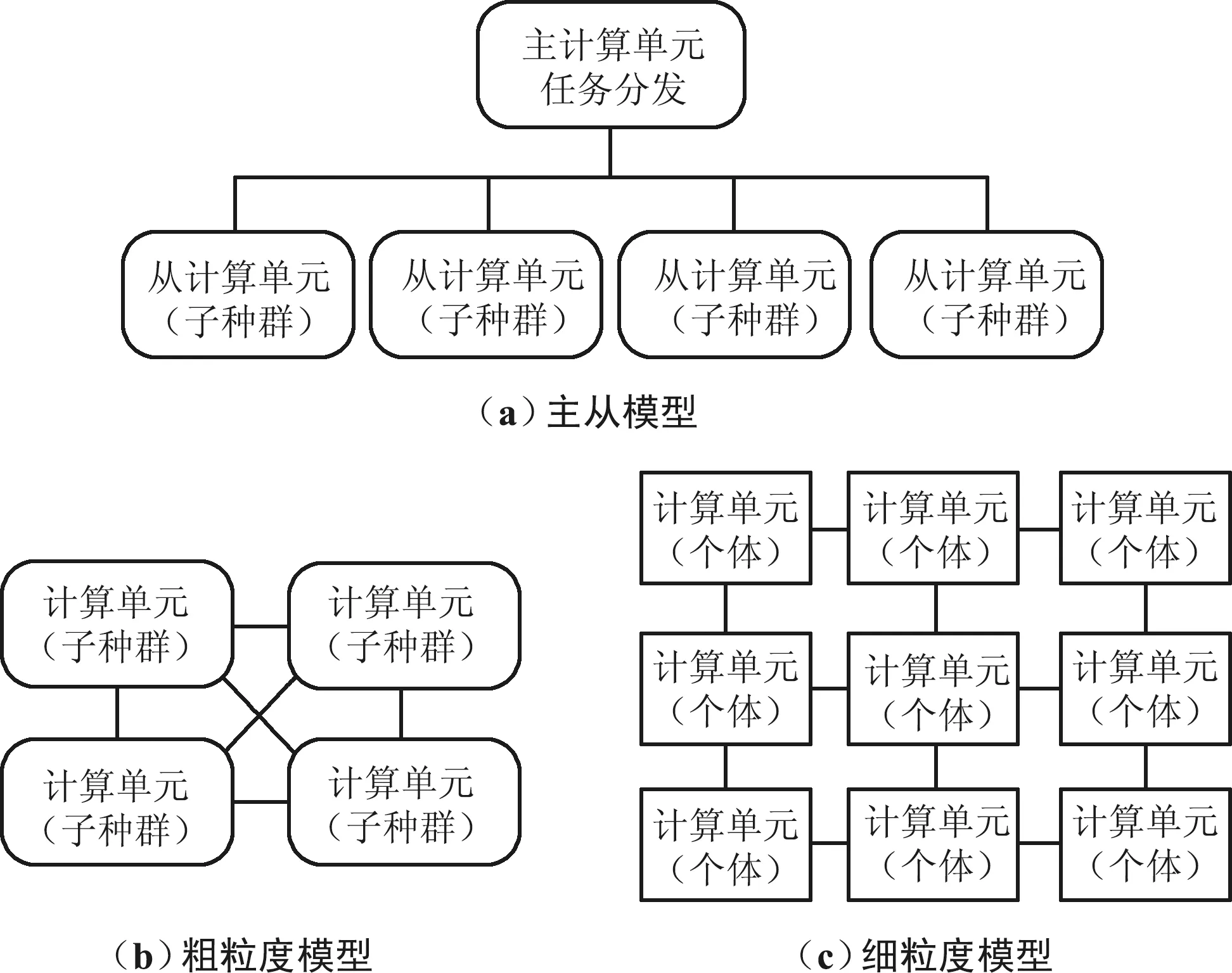
圖4 PGA Fig.4 PGA
3.2 基于并行遺傳的選星算法
航天器機(jī)載計(jì)算機(jī)頻率普遍低于地面工業(yè)產(chǎn)品頻率。為了滿足計(jì)算要求,現(xiàn)代航天器電子系統(tǒng)主要采用分布式計(jì)算結(jié)構(gòu),用多個(gè)處理核心或計(jì)算單元完成各種任務(wù)[15]。該低頻多核計(jì)算結(jié)構(gòu)適應(yīng)粗粒度模型且實(shí)現(xiàn)方法靈活。因此,選擇基于粗粒度模型的PGA。圖5為基于并行遺傳的選星算法流程[16]。
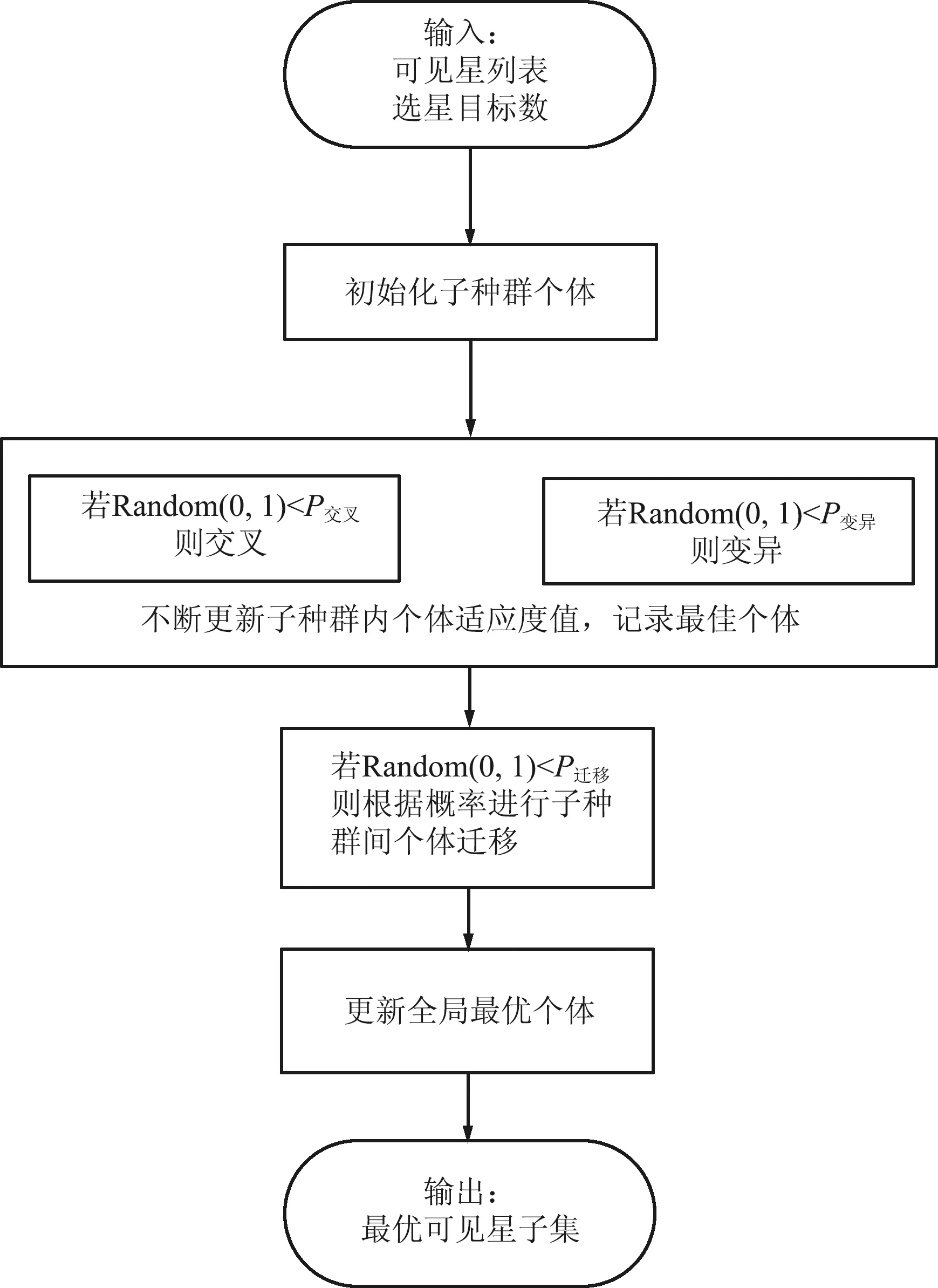
圖5 選星算法流程Fig.5 Process of star selection algorithm
4 實(shí)驗(yàn)及結(jié)論
4.1 仿真環(huán)境說明
通過仿真軟件Satellite Tool Kit (STK) 分析SSTO航天器在遠(yuǎn)地點(diǎn)機(jī)動(dòng)到地球同步軌道期間結(jié)合多GNSS與慣導(dǎo)緊組合定位的精度。由于在軌的每顆 GNSS 衛(wèi)星都在不斷維護(hù)和更新,因此可以服務(wù)的衛(wèi)星數(shù)量會(huì)隨時(shí)間而變化,本實(shí)驗(yàn)使用了最新公開發(fā)布的GNSS兩行根數(shù) (Two-Line Element) 文件和各系統(tǒng)運(yùn)行狀態(tài)以及各系統(tǒng)建設(shè)計(jì)劃,模擬生成對(duì)應(yīng)的星座,其具體配置如圖6所示。北斗系統(tǒng)中的同步軌道衛(wèi)星分為GEO和IGSO兩類。

圖6 多GNSS配置參數(shù)Fig.6 Multi-GNSS configuration parameters
航天器初始高度約為71 225 km,初始位置誤差為10 m,速度誤差為0.1 m/s。總仿真時(shí)間為11 000 s,慣性導(dǎo)航系統(tǒng)輸出頻率為10 Hz,多GNSS接收機(jī)輸出觀測信息頻率為1 Hz。航天器在9 078~10 578 s段以約0.5 m/s2的加速度在恒定推力模式下進(jìn)行機(jī)動(dòng)。偽距率誤差取0.1 m/s。表1展示了IMU和機(jī)載時(shí)鐘誤差模型的相關(guān)參數(shù)[17-20]。仿真硬件采用的處理器為Intel Core i7-10700F @2.90 GHz,采取C++11標(biāo)準(zhǔn)多線程(std::thread)模擬實(shí)現(xiàn)多種群的粗粒度并行,仿真程序使用Python3.7編寫。
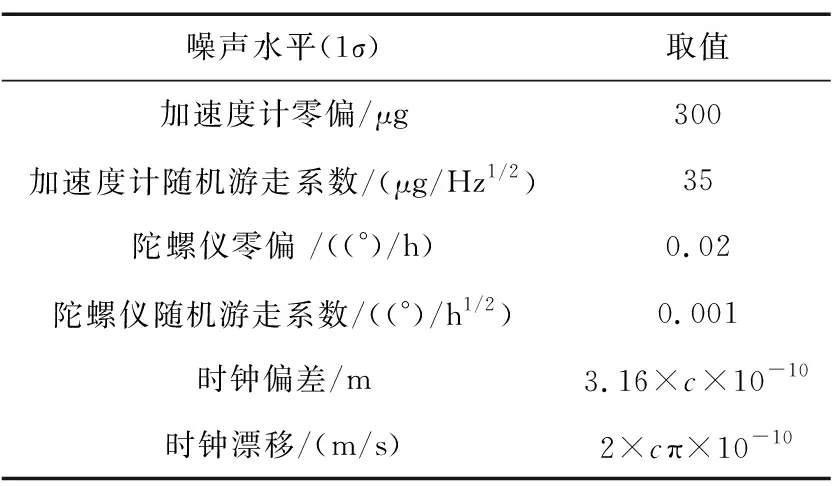
表1 IMU與時(shí)鐘誤差模型參數(shù)設(shè)定值Tab.1 Parameter settings for IMU and clock error model
4.2 可見衛(wèi)星分布
通常采用方位圖統(tǒng)計(jì)分析高軌道航天器一個(gè)軌道周期內(nèi)的可見衛(wèi)星分布,其中俯仰角θ定義為航天器接收機(jī)天線的信號(hào)接收角,方位角ψ定義為航天器與衛(wèi)星的連線與航天器當(dāng)前速度方向的夾角。θ、ψ的計(jì)算如下:
(20)
(21)

(22)
式中:n為航天器接收機(jī)此刻位置向徑。
根據(jù)同時(shí)滿足接收機(jī)與導(dǎo)航衛(wèi)星間幾何可見和接收功率大于門限值來分析SSTO航天器一個(gè)軌道周期內(nèi)的可見衛(wèi)星統(tǒng)計(jì)分布情況,如圖7所示。可以看出,BDS在高軌場景下具有更好的可見星分布(俯仰角范圍更大);與其他系統(tǒng)相比,Galileo的分布不利于高軌道航天器的導(dǎo)航,并且主瓣內(nèi)缺少部分角度下的分布。結(jié)合在軌衛(wèi)星的實(shí)際數(shù)據(jù)可看出,BDS的GEO/IGSO衛(wèi)星在優(yōu)化可見衛(wèi)星的幾何分布方面發(fā)揮了明顯的作用[21]。
4.3 實(shí)驗(yàn)結(jié)果分析
圖8和圖9顯示了SSTO航天器使用所有可見衛(wèi)星進(jìn)行緊組合定位時(shí)軌道的徑向(R)、切向(T)和法向(N)位置和速度誤差值。由圖 10可以看出,500 s和 4 700 s左右的誤差值明顯高于其他時(shí)間,比較各時(shí)間的平均載噪比,在對(duì)應(yīng)時(shí)間接收到的可見衛(wèi)星信號(hào)的載噪比明顯低于其他時(shí)間。 這是因?yàn)榈洼d噪比會(huì)增加接收器的熱噪聲,因而增加了偽距觀測的誤差。
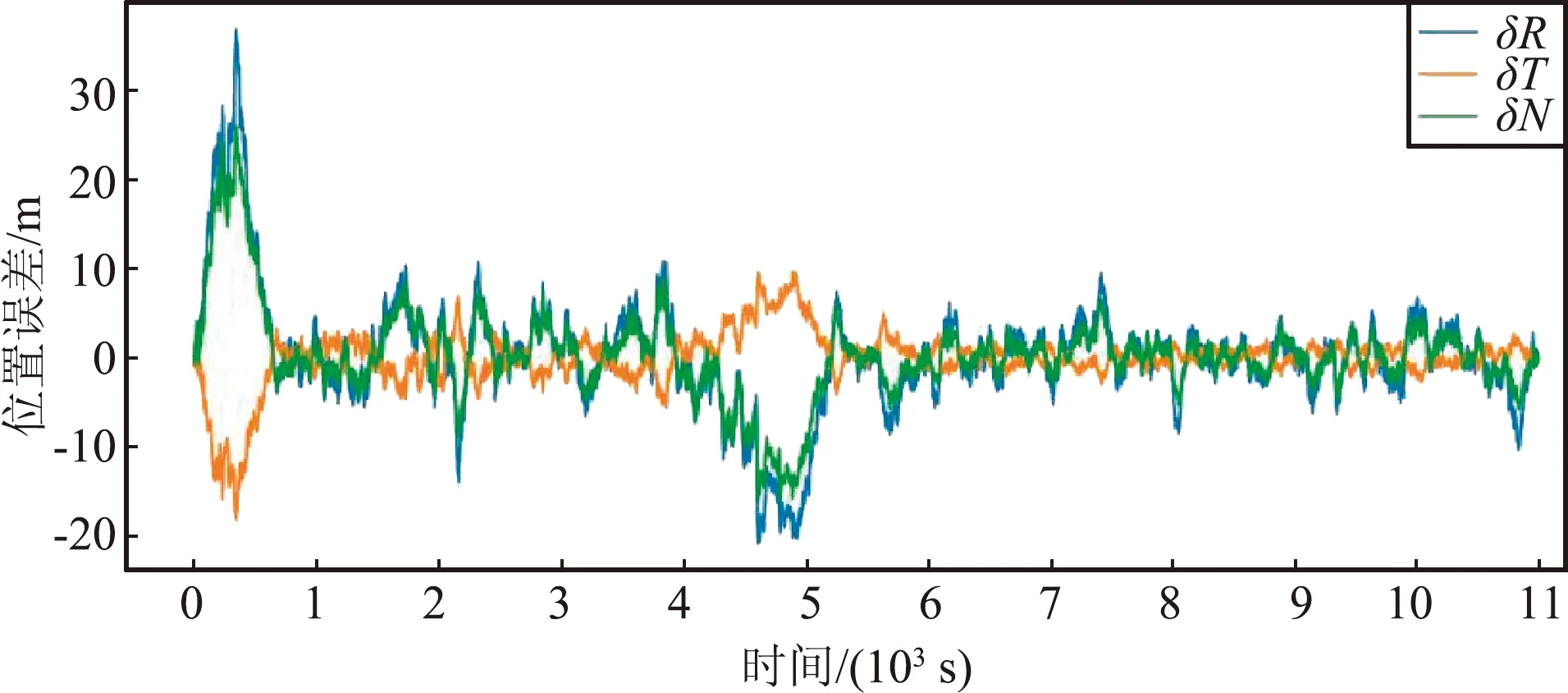
圖8 航天器位置誤差Fig.8 Spacecraft position error
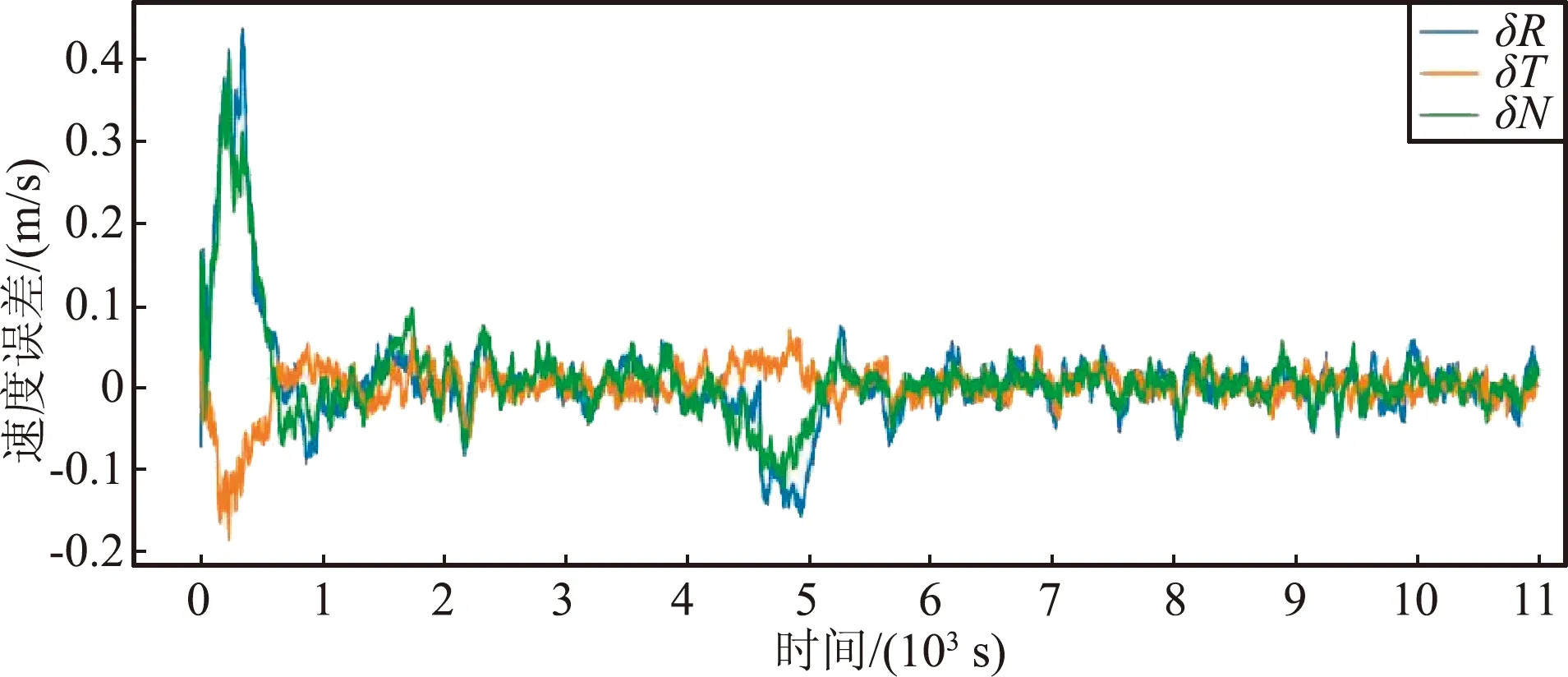
圖9 航天器速度誤差Fig.9 Spacecraft velocity error
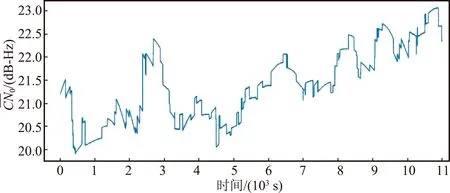
圖10 航天器可見星平均載噪比Fig.10 Average load-to-noise ratio of spacecraft visible star
通過PGA高軌選星算法選出加權(quán)精度因子最優(yōu)的衛(wèi)星組合作為觀測值輸入ESKF模型,結(jié)果如圖11和圖12所示。在選擇的衛(wèi)星組合替換原來觀測量輸入系統(tǒng)之后,定位系統(tǒng)獲得更低的誤差值。表2顯示了緊組合定位的RMSE值,包括軌道徑向、切線、法線和三維誤差項(xiàng)。
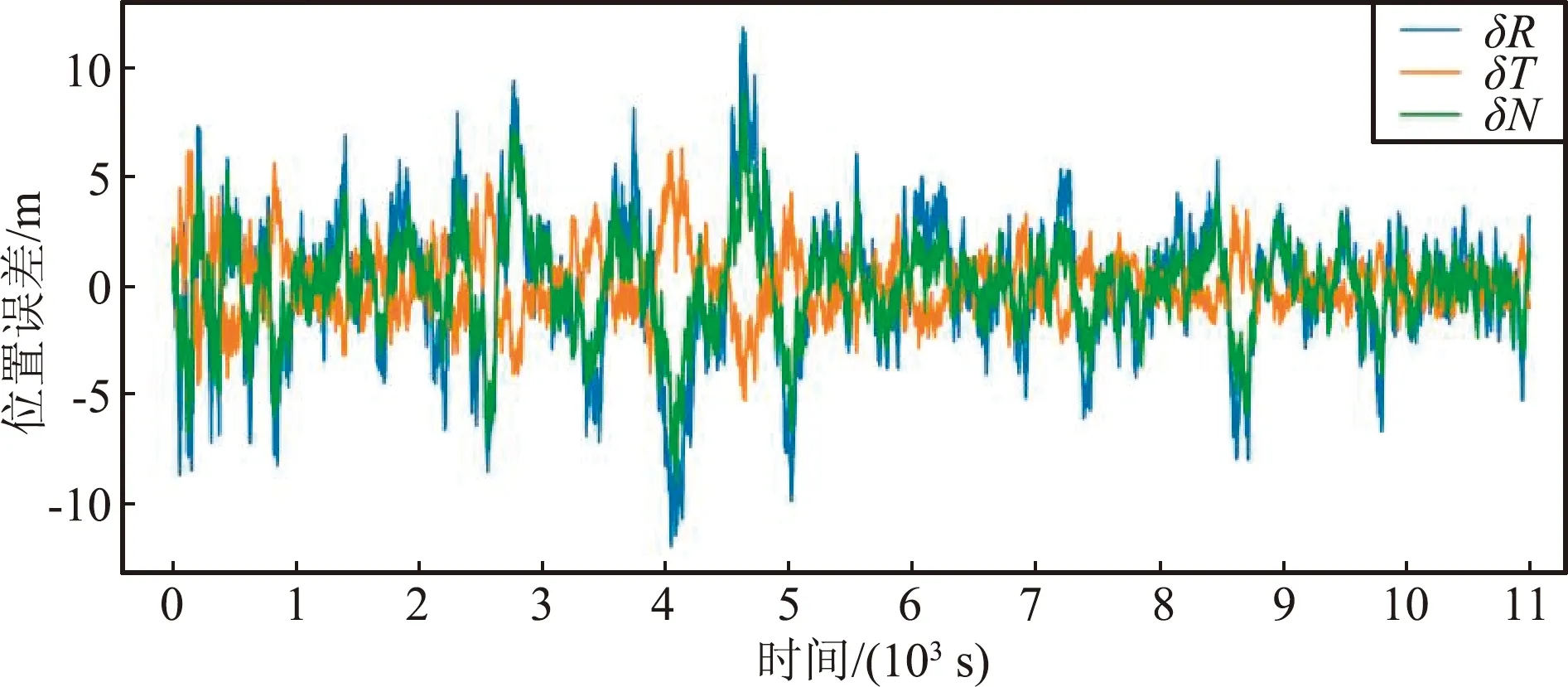
圖11 航天器位置誤差(優(yōu)化選星)Fig.11 Spacecraft position error (optimized star selection)
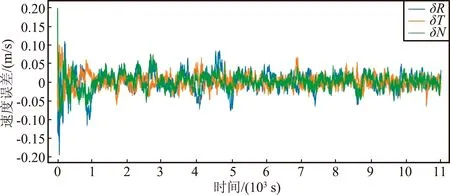
圖12 航天器速度誤差(優(yōu)化選星)Fig.12 Spacecraft velocity error (optimized star selection)
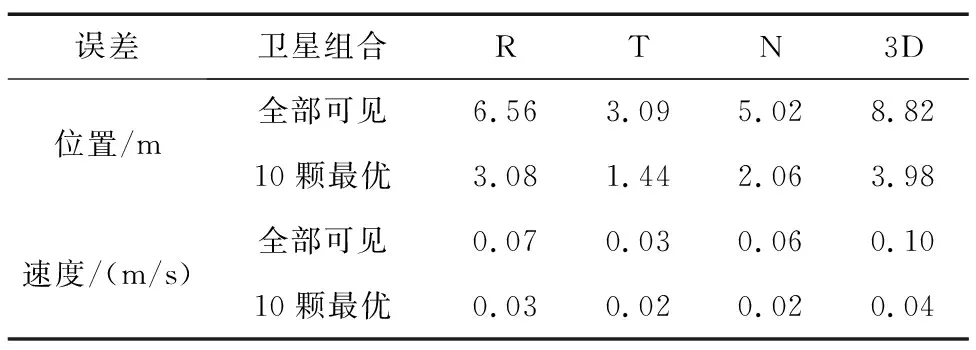
表2 ESKF緊組合定位下徑向、切向、法向與三維誤差值(RMSE)對(duì)比Tab.2 Comparison of radial, tangential, normal and three-dimensional error values (RMSE) for ESKF tight combination positioning
圖13對(duì)比了基于ESKF的緊組合定位和松組合定位的位置誤差。其中,9 010~9 110 s可見衛(wèi)星數(shù)為2~6顆,不滿足衛(wèi)星定位方案的要求,此時(shí)定位誤差漸漸上升。當(dāng)滿足解算條件時(shí),松緊組合的誤差處于近似相同水平。當(dāng)可見衛(wèi)星數(shù)量較少且不滿足解算條件時(shí),緊組合模式可以繼續(xù)修正慣性誤差,而松組合模式下誤差持續(xù)發(fā)散且出現(xiàn)定位較大偏移錯(cuò)誤。

圖13 緊組合與松組合定位位置誤差對(duì)比Fig.13 Comparison of positioning position error between tight combination and loose combination
4.4 實(shí)驗(yàn)結(jié)論
基于高軌仿真模型,對(duì)SSTO航天器遠(yuǎn)地點(diǎn)變軌過程進(jìn)行緊組合定位仿真驗(yàn)證。實(shí)驗(yàn)結(jié)果表明,典型的高軌航天器在使用多星座GNSS觀測和SINS進(jìn)行緊組合定位時(shí),可以達(dá)到米級(jí)定位精度。其中SSTO航天器3D位置 RMSE為8.82 m,3D速度RMSE為0.10 m/s。將PGA選星算法應(yīng)用于緊組合定位算法時(shí),3D位置和速度RMSE分別降低至3.98 m和0.04 m/s。與不滿足解算條件時(shí)誤差持續(xù)發(fā)散的松組合相比,緊組合模式可以在更苛刻的高軌環(huán)境下保持較為恒定的誤差水平。
5 結(jié)束語
本文考慮部分高軌任務(wù)中應(yīng)用GNSS進(jìn)行定位時(shí)的非連續(xù)性與慣導(dǎo)組件誤差長期累積的場景,對(duì)基于偽距、偽距率觀測值的高軌緊組合定位算法進(jìn)行研究,得到了多星座 GNSS 背景下典型高軌航天器應(yīng)用緊組合定位時(shí)的誤差結(jié)果。驗(yàn)證了PGA選星算法在緊組合定位中依然能有效降低位置誤差、速度誤差。結(jié)果表明,當(dāng)?shù)湫透哕壓教炱髟谑褂枚嘈亲鵊NSS和SINS進(jìn)行緊組合定位時(shí),可以實(shí)現(xiàn)米級(jí)定位精度,且與松組合定位模式相比,緊組合定位模式導(dǎo)航性能更為高效穩(wěn)定。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19