基于穩定逆的生化過程操作曲線求取方法
2023-12-25 05:08:31戴吟劉飛
化工自動化及儀表 2023年6期
戴吟 劉飛
基金項目:國家自然科學基金項目(批準號:61833007)資助的課題。
作者簡介:戴吟(1998-),碩士研究生,從事工業過程控制及應用的研究。
通訊作者:劉飛(1965-),教授,從事先進過程控制方面的教學與科研工作,fliu@jiangnan.edu.cn。
引用本文:戴吟,劉飛.基于穩定逆的生化過程操作曲線求取方法[J].化工自動化及儀表,2023,50(6):000-000.
DOI:10.20030/j.cnki.1000-3932.202306000
摘? 要? 針對生化過程中操作曲線的求取問題,提出一種非線性穩定逆的近似求解方法。該方法根據過程動力學模型,利用改進的穩定逆算法來求解對應生產輸出目標的操作曲線。并針對穩定逆算法計算量過大的問題,通過對穩定逆原理中的內動態進行離散化處理,將原本利用非線性系統內動態方程求解內動態解析解的過程,利用遞推公式轉化成求解內動態的離散數值解,從而加快穩定逆算法的計算速度。最后以化學反應器為例進行操作曲線設計的仿真,驗證了所提方法的可行性。
關鍵詞? 操作曲線? 動力學模型? 非線性穩定逆? 內動態方程? 化學反應器
中圖分類號? TP273? ? ? ? ?文獻標志碼? A? ? ? ? ?文章編號? 1000-3932(2023)06-0000-00
生物及化工生產目標的實現取決于過程溫度、流量及液位等關鍵變量的操作曲線,一旦工藝確定,控制系統即可按照生產操作曲線進行實時控制,從而完成最終的生產要求[1]。生化過程操作曲線的選取與產品質量、產量及生產時間等目標密切相關,由此過程工藝的制定是實現智能生產的核心環節,也是整個生化生產的基礎。一般情況,調控參數可以通過工藝人員反復實驗得到[2~4],但實驗方法需要耗費大量的人力、物力和時間,尤其難以適應現代生產對多品種、小批量、多目標的生產需求,同時也很難通過實驗設計的方法來得到動態操作曲線[5]。根據生產目標,在已知生產過程動力學的基礎上,通過解析的方法求解操作曲線,是值得開拓的研究領域。從控制理論的角度,這一問題可轉化為在動力學模型基礎上,根據模型輸出軌跡(工藝目標)求取相應的模型輸入軌跡(調控曲線),即模型逆的存在性及求解算法。
1996年HUNT L R等針對非最小相位過程首次提出非因果穩定逆的方法[6]。由于穩定逆方法需要未來無窮時刻的軌跡,因此改進的基于預覽信息的穩定逆方法被提出[7,8],進一步引入輸出誤差和控制器輸出能量為性能指標,給出了最優預覽穩定逆方法[9]。考慮到穩定逆算法需要很大預作用時間區間,利用最優狀態轉移的方法使過程狀態轉移到穩定逆初態,進而提出了基于最優狀態轉移的穩定逆算法[10]。
由于穩定逆算法所需計算量很大,近年來有學者利用迭代學習結合樣條技術得到精確跟蹤所需的輸入控制量[11],還有基于最小二乘、B樣條等基函數的方法來求解非最小相位過程的穩定逆[12]。一般而言,與線性穩定逆算法有所區別,非線性過程穩定逆計算中需要利用Picard迭代方法來得到非線性內動態方程的解[8],對于復雜過程模型或者輸出軌跡,求解內動態方程時會遇到計算量過大,甚至解析解無法描述的困難。
考慮生化過程非線性動力學情形,筆者基于穩定逆方法,提出了一種生產操作曲線的快速求取方法,即根據過程動力學模型,利用改進的穩定逆算法來求解對應生產輸出目標的操作曲線。首先將穩定逆算法中內動態進行離散化處理,利用遞推公式推導內動態的離散數值表達式;再以Picard迭代進行遞推求取非線性內動態方程的數值解,從而減少計算量、加快穩定逆算法的計算速度;最后以化學反應器為例,進行操作曲線設計驗證。
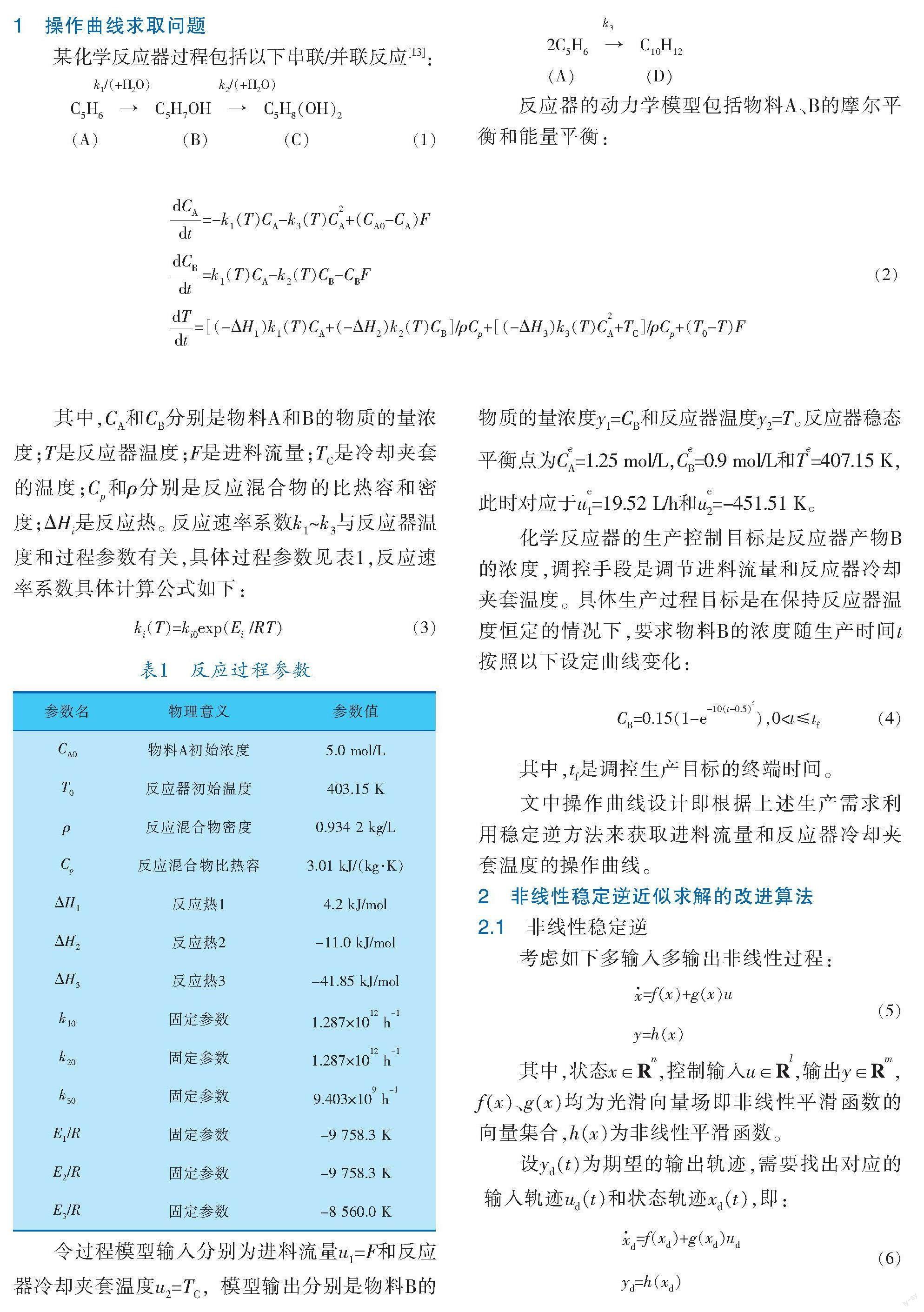
1? 操作曲線求取問題
考慮一個化學反應器過程,包括以下串聯/并聯反應[13]:
(1)
反應器的動力學模型包括物料A、B的摩爾平衡和能量平衡:
(2)
其中,CA和CB是物料A和B的摩爾濃度;T是反應器溫度;是進料流量;TC是冷卻夾套的溫度;Cp和分別是反應混合物的比熱容和密度;是反應熱。反應速率系數k1~k3與反應器溫度和過程參數有關,具體過程參數見表1,反應速率系數具體計算公式如下:
(3)
令過程模型輸入分別為進料流量u1=F和反應器冷卻夾套溫度u2=TC,模型輸出分別是物料B的摩爾濃度y1=CB和反應器溫度y2=T。反應器穩態平衡點為和,此時對應于和。
化學反應器的生產控制目標是反應器產物B的濃度,調控手段是調節進料流量和反應器冷卻夾套溫度。具體生產過程目標是在保持反應器溫度恒定的情況下,要求物料B的濃度隨生產時間按照以下設定曲線變化:
(4)
其中,tf是調控生產目標的終端時間。
文中操作曲線設計即根據上述生產需求利用穩定逆方法來獲取進料流量和反應器冷卻夾套溫度的操作曲線。
2? 非線性穩定逆近似求解的改進算法
2.1? 非線性穩定逆
考慮如下多輸入多輸出非線性過程:
(5)
其中,狀態,控制輸入,輸出,、均為光滑向量場即非線性平滑函數的向量集合,為非線性平滑函數。
設為期望的輸出軌跡,需要找出對應的輸入軌跡和狀態軌跡,即:
(6)
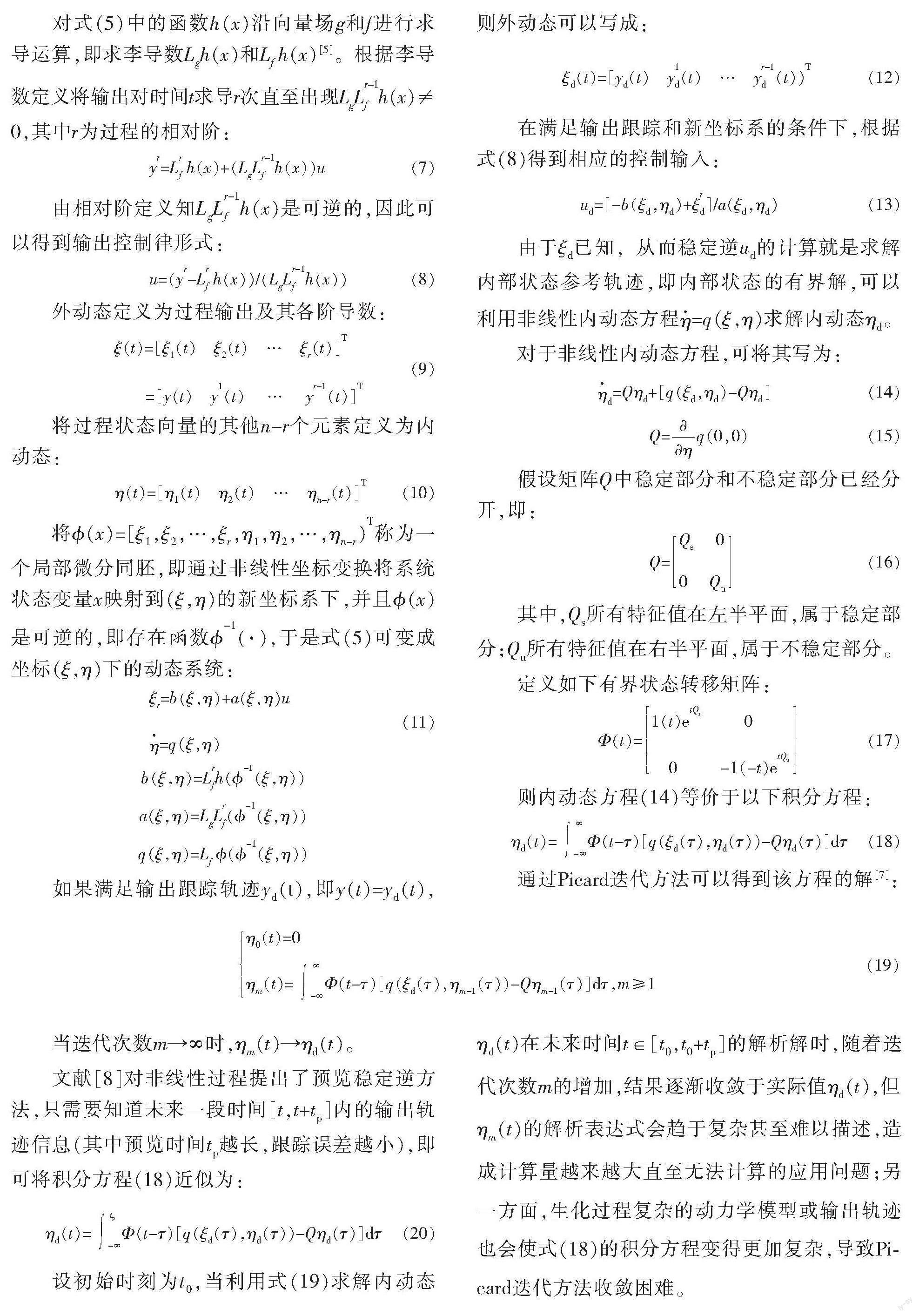
對式(5)中的函數h(x)沿向量場g和f進行求導運算,即求李導數和[5]。根據李導數定義將輸出對時間t求導r次直至出現,其中r為過程的相對階:
(7)
由相對階定義知是可逆的,因此可以得到輸出控制律形式:
(8)
外動態定義為過程輸出及其各階導數:
(9)
將過程狀態向量的其他n-r個元素定義為內動態:
(10)
將稱為一個局部微分同胚,即通過非線性坐標變換將系統狀態變量x映射到的新坐標系下,并且是可逆的,即存在函數,于是式(5)可變成坐標下的動態系統:
(11)
如果滿足輸出跟蹤軌跡,即,則外動態可以寫成:
(12)
在滿足輸出跟蹤和新坐標系的條件下,根據式(8)得到相應的控制輸入:
(13)
由于已知,從而穩定逆的計算就是求解內部狀態參考軌跡,即內部狀態的有界解,可以利用非線性內動態方程求解內動態。
對于非線性內動態方程,可將其寫為:
(14)
(15)
假設矩陣Q中穩定部分和不穩定部分已經分開,即:
(16)
其中,Qs所有特征值在左半平面,屬于穩定部分;Qu所有特征值在右半平面,屬于不穩定部分。
定義如下有界狀態轉移矩陣:
(17)
則內動態方程(14)等價于以下積分方程:
(18)
通過Picard迭代方法可以得到該方程的解[7]:
(19)
當迭代次數時,。
文獻[8]對非線性過程提出了預覽穩定逆方法,只需要知道未來一段時間內的輸出軌跡信息,其中預覽時間越長,跟蹤誤差越小。即積分方程(18)可以近似為:
(20)
設初始時刻為t0,利用式(19)求解內動態在未來時間的解析解時,隨著迭代次數m的增加,結果逐漸收斂于實際值,但的解析表達式會趨于復雜甚至難以描述,造成計算量越來越大直至無法計算的應用問題;另一方面,生化過程復雜的動力學模型或輸出軌跡也會使式(18)的積分方程變得更加復雜,導致Picard迭代方法收斂困難。
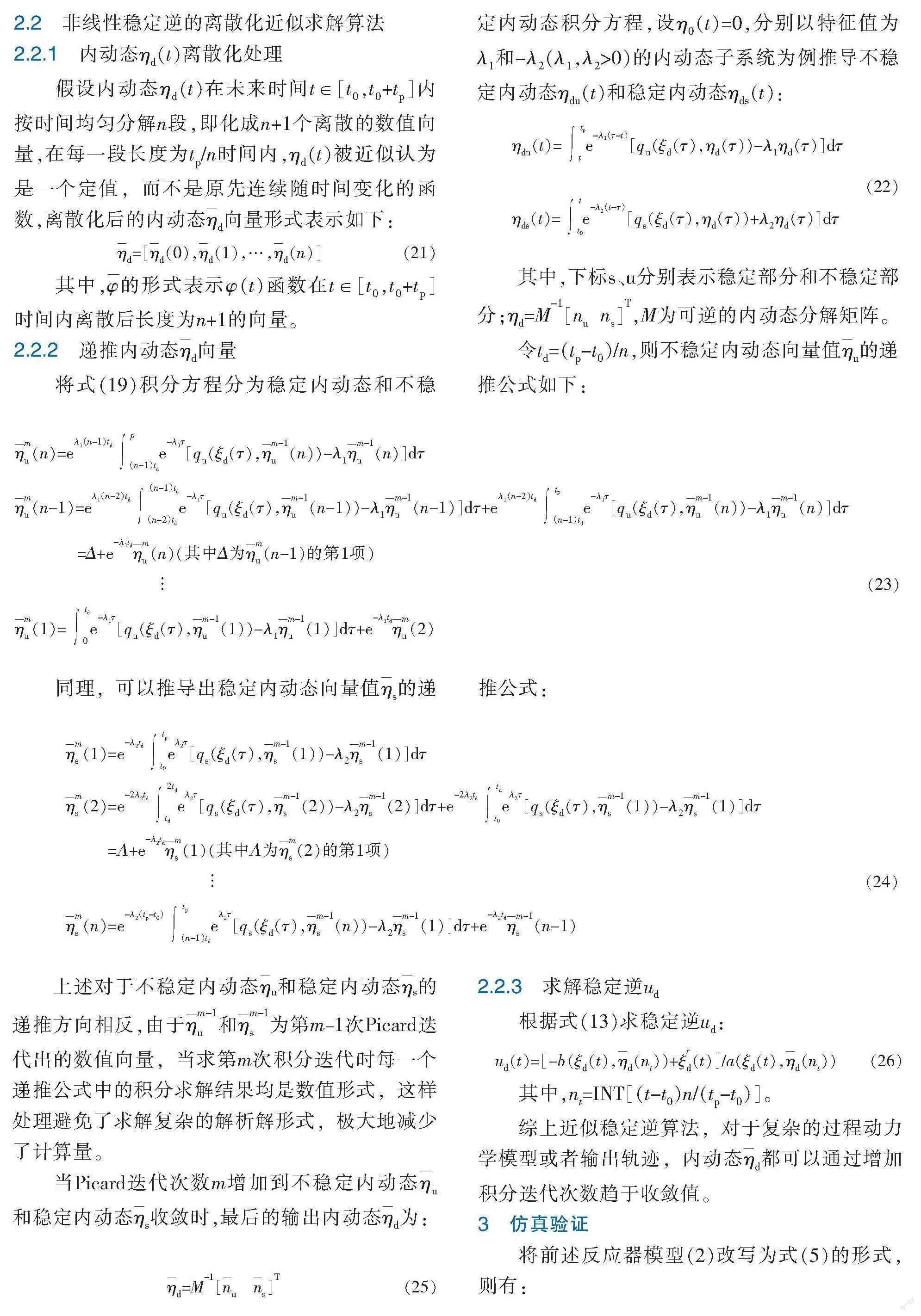
2.2? 非線性穩定逆的離散化近似求解算法
2.2.1? 內動態離散化處理
假設內動態在未來時間內按時間均勻分解n段,即化成n+1個離散的數值向量,在每一段長度為時間內,被近似認為是一個定值,而不是原先連續隨時間變化的函數,離散化后的內動態向量形式表示如下:
(21)
其中,的形式表示函數在時間內離散后長度為n+1的向量。
2.2.2? 遞推內動態向量
將式(19)積分方程分為穩定內動態和不穩定內動態積分方程,設,分別以特征值為和()的內動態子系統為例推導不穩定內動態和穩定內動態:
(22)
其中,下標s、u分別表示穩定部分和不穩定部分;,M為可逆的內動態分解矩陣。
不穩定內動態向量值的遞推公式如下:
(23)
同理,可以推導出穩定內動態向量值的遞推公式:
(24)
上述對于不穩定內動態和穩定內動態的遞推方向相反,由于和為第m-1次Picard迭代出的數值向量,當求第m次積分迭代時每一個遞推公式中的積分求解結果均是數值形式,這樣處理避免了求解復雜的解析解形式,極大減少了計算量。
當Picard迭代次數m增加到不穩定內動態和穩定內動態收斂時,最后的輸出內動態為:
(25)
2.2.3? 求解穩定逆ud
根據式(13)求穩定逆ud:
(26)
其中,。
綜上近似穩定逆算法,對于復雜的過程動力學模型或者輸出軌跡,內動態都可以通過增加積分迭代次數趨于收斂值。
3? 仿真驗證
將前述反應器模型(2)改寫為式(5)的形式,則有:
(27)
其中,模型輸入,狀態變量,模型輸出。穩定逆方法就是已知為期望的輸出軌跡,找出輸入軌跡ud和狀態軌跡xd。
根據式(4)假設反應器的生產目標是要求產物濃度按照如下時變曲線變化:
(28)
為了求解進料流量和夾套溫度調控的操作曲線即模型的穩定逆,根據式(8)穩定逆輸出為:
(29)
其中,是過程的不穩定內動態,已知內動態就可以推導出穩定逆ud,內動態方程和積分方程如下:
(30)
(31)
對于該非線性內動態方程使用經典穩定逆很難求出解析解,Picard迭代積分也無法應用,通過利用筆者提出近似穩定逆算法結合Picard迭代積分可以求解得到收斂的內動態向量,在選取n=900個分段區間進行模型仿真,結果如圖1所示。
由圖1可知,隨著Picard迭代次數m的不斷增加,反應器產物濃度相對于生產濃度指標的誤差在不斷減少,這驗證了筆者提出的近似穩定逆算法可以與Picard迭代法結合求解非線性穩定逆,通過模型的穩定逆輸出即進料流量和夾套溫度按照給定的操作曲線變化,可以完成對應的生產目標。進料流量u1和夾套溫度u2的最佳操作曲線即Picard迭代次數為8次的近似穩定逆輸出結果(圖2)。
為考察分段區間數對于近似穩定逆算法的影響,對于內動態向量在選取n=900個和n=90兩種分段區間數進行仿真對比,其中Picard迭代次數m=8,仿真結果如圖3所示。
由圖3可知,計算近似穩定逆算法(n=900)模型輸出產物濃度y1和反應器溫度y2相對于生產要求曲線的積分誤差分別為0.613 3和15.829 2;而近似穩定逆算法(n=90)模型輸出產物濃度y1和反應器溫度y2相對于生產要求曲線的積分誤差IAE分別為0.806 4和21.954 3。由此可知,分段數n越大,近似穩定逆的誤差越小。綜合考量誤差和計算量,可以通過近似穩定逆算法得到一個滿足生產過程要求的控制變量操作曲線。
4? 結束語
針對生化過程中操作曲線的求取問題,提出一種非線性穩定逆的近似求解算法,對非線性穩定逆算法中求解內動態方程方法進行了改進,通過將內動態離散化處理,利用遞推公式推導預覽穩定逆中的積分方程的解,將原本求內動態解析解問題轉為求數值向量解問題,這樣不僅可以減少求解穩定逆的計算量,還可以與Picard迭代法結合實現非線性生化過程相應操作曲線的求解。最后通過仿真驗證了所提算法的有效性。
需要說明的是,文中近似穩定逆誤差大小與內動態跟蹤時域內的分段數n有關,如何根據不同跟蹤目標權衡跟蹤精度和計算量,從而選取合適的分段數n是之后需要解決的問題。
參? 考? 文? 獻
[1]仇力,欒小麗,劉飛.基于正交余弦相似度的間歇過程操作曲線優化[J].化學工程,2019,47(1):65-69.
[2]FONSECA B G,SOLEDAD M,INES C R,et al.Bioconversion in batch bioreactor of olive-tree pruning biomass optimizing treatments for ethanol production[J].Biochemical Engineering Journal,2020,164(1):107793.
[3]THANAPIMMETHA A,SAISRIYOOT M,KHOMLAEM C,et al.A comparison of methods of ethanol production from sweet sorghum bagasse[J].Biochemical Engineering Journal,2019,151:107352.
[4]ANWESHA M,PURVI Z,RUSHIKA P,et al.Optimization of microbial fuel cell process using a novel consortium for aromatic hydrocarbon bioremediation and bioelectricity generation[J].Journal of Environmental Management,2021,298:113546.
[5]劉琳.精煉爐最佳吹氬曲線的制定與優化[D].沈陽:東北大學,2013.
[6]HUNT L R,MEYER G,SU R.Noncausal inverses for linear systems[J].IEEE Transactions on Automatic Control,1996,41(4):608-611.
[7]ZOU Q Z,DEVASIA S.Preview-based stable-inversion for output tracking of linear systems[J].Journal of Dynamic Systems,Measurement,and Control,1999,121(4):625-630.
[8]ZOU Q Z,DEVASIA S.Precision preview-based stable-inversion for nonlinear nonminimum-phase systems:The VTOL example[J].Automatica,2007,43(1):117-127.
[9]ZOU Q Z.Optimal preview-based stable-inversion for output tracking of nonminimum-phase linear systems[J].Automatica,2009,45(1):230-237.
[10]張有陵,劉山.基于最優狀態轉移的非因果穩定逆[J].控制理論與應用,2016,33(4):428-436.
[11]WANG H M,KIM K-S,ZOU Q Z.B-spline-decomposition-based output tracking with preview for nonminimum-phase linear systems[J].Automatica,2013,49(5):1295-1303.
[12]ROMAGNOLI R,GARONE E.A general framework for approximated model stable inversion[J].Automatica,2019,101:182-189.
[13]NIEMIEC M P,KRAVARIS C.Nonlinear model-state feedback control for nonminimum-phase processes[J].Automatica,2003,39(7):1295-1302.
(收稿日期:2022-10-20,修回日期:2023-07-13)
