基于顯著性劃分的機載激光雷達點云濾波算法優化
2023-12-25 06:33:15曾忱劉凱馮琪
化工自動化及儀表 2023年6期
曾忱 劉凱 馮琪
作者簡介:曾忱(1985-),高級工程師,從事輸電線路運維管理工作,zengc009@tom.com。
引用本文:曾忱,劉凱,馮琪.基于顯著性劃分的機載激光雷達點云濾波算法優化[J].化工自動化及儀表,2023,50(6):000-000.
DOI:10.20030/j.cnki.1000-3932.202306000
摘? 要? 針對點云數據擬合精度較低、點云顯著性渲染效果較差的問題,提出一種基于顯著性劃分的機載激光雷達點云濾波優化算法。實驗結果顯示,一類錯誤率、二類錯誤率、總體錯誤率、Kappa值的均值分別為2.53%、2.27%、2.38%、95.10,可有效實現高精度點云濾波目的。
關鍵詞? 點云濾波算法? 機載激光雷達? 顯著性劃分? 虛擬格網? 網格分段? 曲面擬合
中圖分類號? TN713? ? ? ? ? ? ? ?文獻標識碼? A? ? ? ? ? ? ? ? 文章編號? 1000-3932(2023)06-0000-00
機載激光雷達作為一種全新的采集地形信息方式,相較于以往所使用的航空攝影方式,可有效穿透部分植被遮擋,提升地形信息采集精度[1]。然而在實際操作過程中,由于機載激光雷達具有無拓撲盲目性[2],故其采集的點云數據不僅包含地面信息,還包含地物信息。為獲取數字高程模型,需采用濾波算法清除初始點云內的地物信息,以此提高信息采集精度,因此濾波算法成為機載激光雷達技術應用的關鍵環節[3]。
張漫等在采集三維激光雷達點云數據后,采用直通濾波法對數據實施濾波處理[4]。但該方法在實際應用過程中過度依賴鄰近點云的尋找過程,耗時較多。劉帥等在針對機載激光雷達點云濾波處理問題進行研究時,采用漸進數學形態濾波方法,并以Kappa系數為標準驗證該方法性能[5],但該方法對于地形較為復雜、起伏較為顯著的點云圖濾波效果較差。朱依民等在研究機載激光雷達點云濾波方法時,采用曲面擬合濾波算法[6],該方法對于擬合精度要求較高,擬合策略與參數設定對于最終的濾波結果影響顯著。針對上述問題,筆者提出一種基于顯著性劃分的機載激光雷達點云濾波算法,通過優化濾波算法,顯著提升機載激光雷達點云濾波精度,達到提升地形信息采集精度的目的。
1? 機載激光雷達點云濾波算法優化
機載激光雷達點云濾波算法優化過程中,以虛擬格網組織激光雷達三維點云為基礎,通過多方向掃描方法進行網格分段,并采用高斯權值平均曲率的方式確定機載激光雷達點云圖像中的地面顯著性值,以此為基礎大致確定地形類別。考慮到地形類別的差異性,采用曲面擬合的方式確定高精度的濾波分類面,實現機載激光雷達點云濾波目的。
1.1? 地面顯著性劃分
1.1.1? 虛擬格網構建
構建虛擬格網的主要目的是在二維空間中通過尺寸一致的矩形網格單元劃分機載激光雷達點云[7]。一般條件下,可設定二維平面內網格單元的長與寬一致。針對機載激光雷達點云中的激光腳點,依照其在二維平面的坐標信息將其歸屬于對應的網格內,依照點坐標能夠確定對應網格行列號,基于網格ID可獲取網格內包含的全部機載激光雷達點云序號。通過虛擬格網方式完成機載激光雷達點云數據的組織過程后,單一網格單元的高程通常利用該網格中的最低機載激光雷達點云高程進行描述[8],由此簡化計算過程。格網化公式為:
(1)
(2)
其中,、和、分別表示格網的行列號與機載激光雷達點云的水平坐標;和、分別表示網格間距與機載激光雷達點云的水平邊界值。
1.1.2? 地面顯著性計算
以表示地面顯著性,通過比較地面顯著性值的差異,可以對高程劃分度較為顯著的地物網格與地面網格進行分離[9]。該過程可分為網格分段與顯著性值計算兩個環節,第一環節通過多方向掃描方法進行網格分段,第二環節通過高斯權值的平均曲率方式確定機載激光雷達點云網格單元中的地面顯著性值。
網格分段作為顯著性計算的第一環節,主要目的是對機載激光雷達點云內的若干個網格進行分段處理,通過這一過程實現高程存在明顯區別的網格單元的劃分[10],令相鄰且高程接近的網格能夠劃分到相同分段內。
通過多方向掃描方法進行格網單元分段,掃描方向以機載激光雷達點云二維平面坐標為標準,以y軸正方向為基礎進行順時針運動,在360°中平均設定8個不同的掃描方向,每個方向間的掃描過程不具備相關性。在不同方向上根據單一格網內全部機載激光雷達點云最低高程信息值劃分掃描線段落[11],在隨后的地面顯著性計算過程中同樣使用該機載激光雷達點云最低高程信息值。
以表示高差閾值,在任意掃描方向內的任意掃描線上,以最初的網格單元為起始點,利用根據掃描方向依次向前進行一次訪問。在后相鄰網格的網格高程同當前網格高程相比所得差高于、或后相鄰網格為空的條件下[12],即可將最初的網格單元至當前網格間的全部網格劃分成一個分段;由后相鄰的非空網格為新的起始點,再次進行前向訪問完成分段。
通過格網單元分段能夠有效識別標準的建筑物,所以通常情況下可將值設定成低于去標區域內最低建筑物的高度,一般取值為1.25 m±0.25 m,在此條件下就能夠有效實現網格高程的劃分。
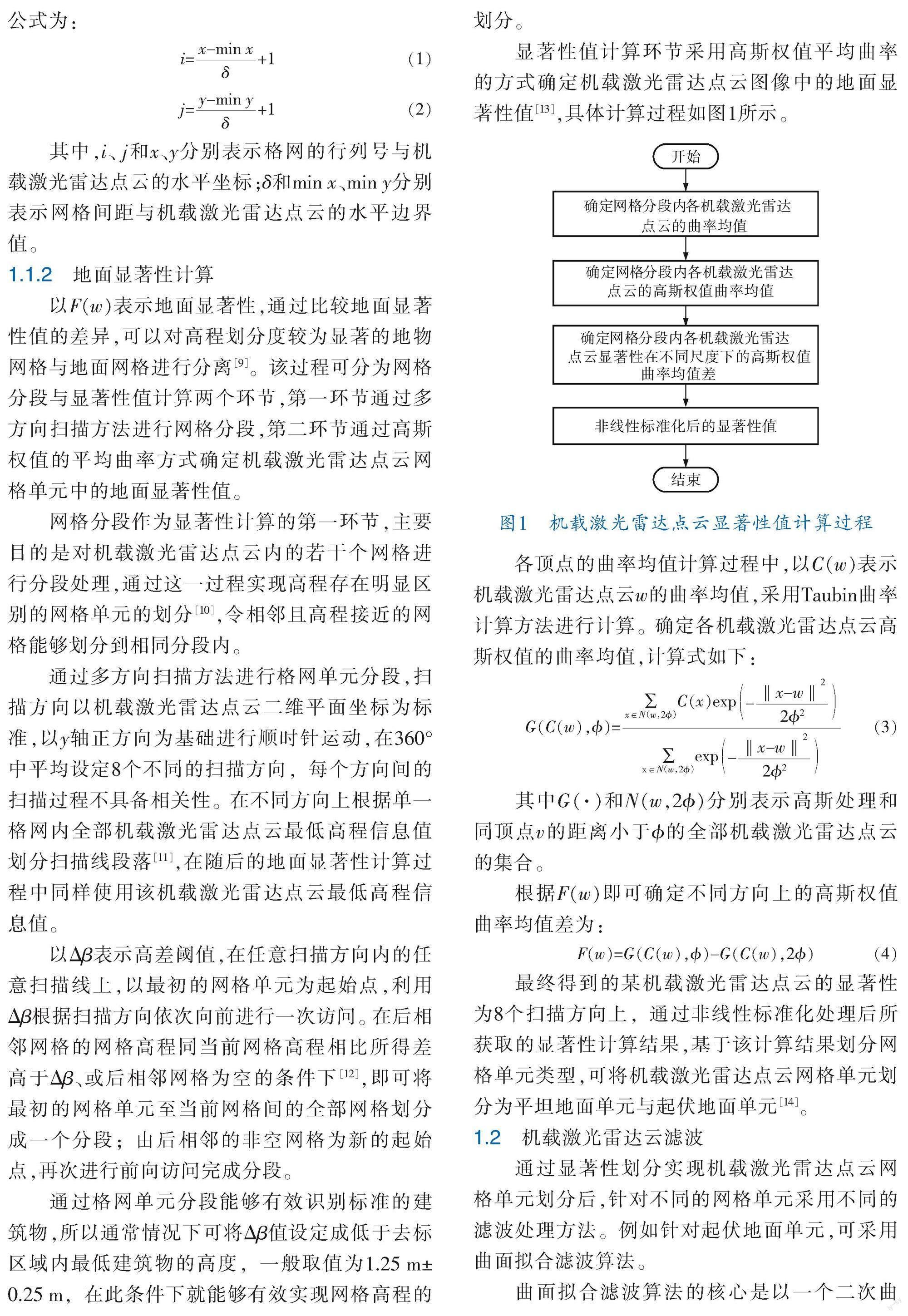
顯著性值計算環節采用高斯權值平均曲率的方式確定機載激光雷達點云圖像中的地面顯著性值[13],具體計算過程如圖1所示。
各頂點的曲率均值計算過程中,以表示機載激光雷達點云的曲率均值,采用Taubin曲率計算方法進行計算。確定各機載激光雷達點云高斯權值的曲率均值,計算式如下:
(3)
其中,和分別表示高斯處理和同頂點v的距離小于的全部機載激光雷達點云的集合。
根據F(w)即可確定不同方向上的高斯權值曲率均值差為:
(4)
最終得到的某機載激光雷達點云的顯著性為8個掃描方向上,通過非線性標準化處理后所獲取的顯著性計算結果,基于該計算結果劃分網格單元類型,可將機載激光雷達點云網格單元劃分為平坦地面單元與起伏地面單元[14]。
1.2? 機載激光雷達云濾波
通過顯著性劃分實現機載激光雷達點云網格單元劃分后,針對不同的網格單元采用不同的濾波處理方法。例如針對起伏地面單元,可采用曲面擬合濾波算法。
曲面擬合濾波算法的核心為以一個二次曲面函數描述任意復雜空間曲面,利用函數值描述擬合過程獲取的相應平面點高程值,確定其與實際高程值間的差值就能夠獲取擬合高程差。
機載激光雷達點云內,地面點云的擬合高程差相對較小,非地面點云的差值則相對較大,基于此可通過設定科學有效的擬合高程差閾值實現地面點云與非地面點云的劃分。
設第個地面點云的三維坐標值為,地表二次曲面擬合模型表達式如下:
(5)
其中,0~u5表示待求參數。
誤差方程V的表達式如下:
(6)
在值不小于6的條件下,能夠獲取最優,以此為基礎實現該空間曲面擬合。
以根據各掃描方向的權組成的權陣為單位陣,依照取最小值的標準,得到計算式如下:
(7)
在式(7)內引入所獲取的參數值就能夠確定擬合曲面方程,在其中輸入機載激光雷達點云的平面坐標值就能夠得到擬合高程值,通過對比擬合高程差同相比即可完成機載激光雷達點云的濾波。
2? 測試結果與分析
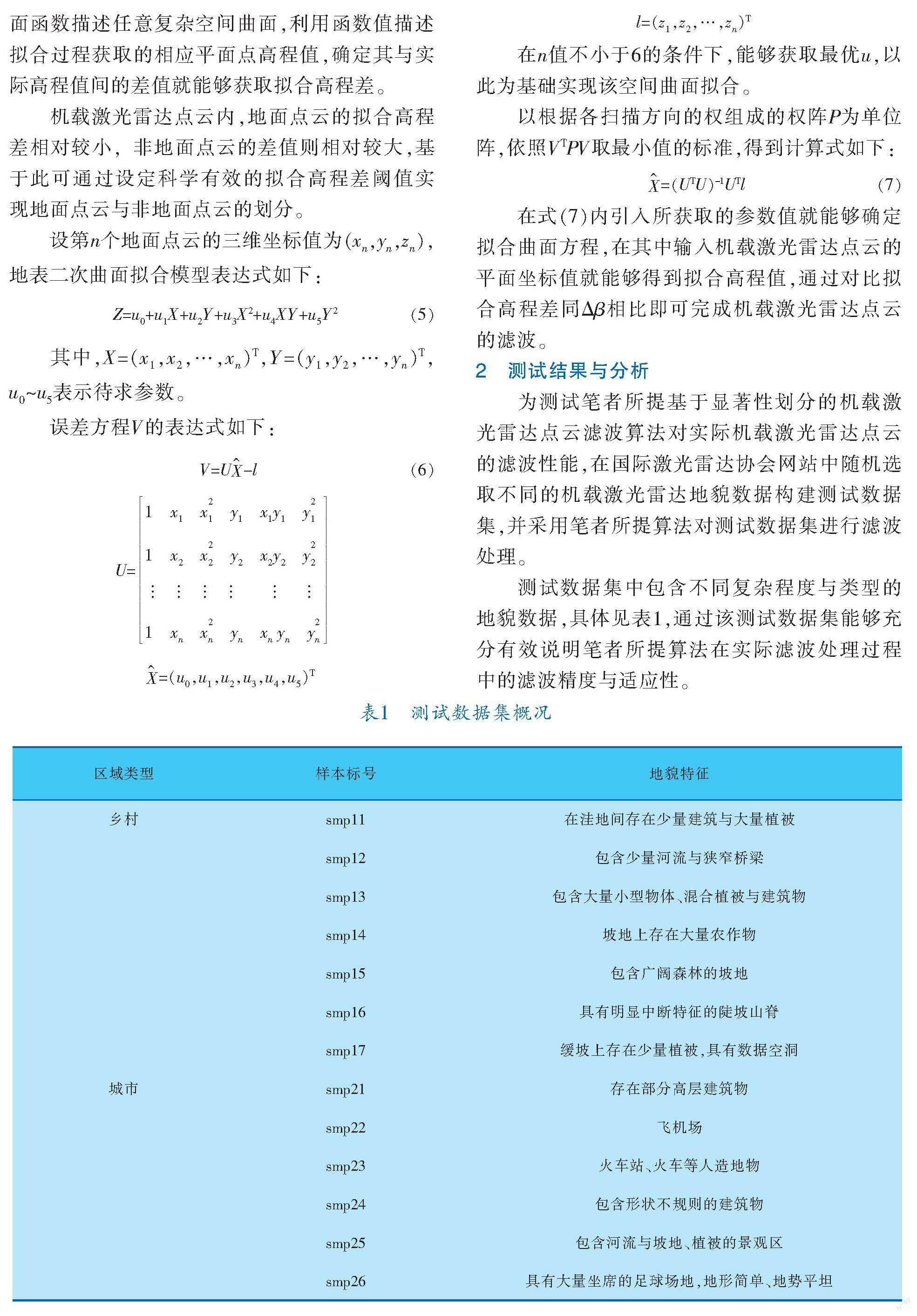
為測試筆者所提基于顯著性劃分的機載激光雷達點云濾波算法對實際機載激光雷達點云的濾波性能,在國際激光雷達協會網站中隨機選取不同的機載激光雷達地貌數據構建測試數據集,并采用筆者所提算法對測試數據集進行濾波處理。
測試數據集中包含不同復雜程度與類型的地貌數據,具體見表1,通過該測試數據集能夠充分有效說明筆者所提算法在實際濾波處理過程中的濾波精度與適應性。
2.1? 地面顯著性劃分結果
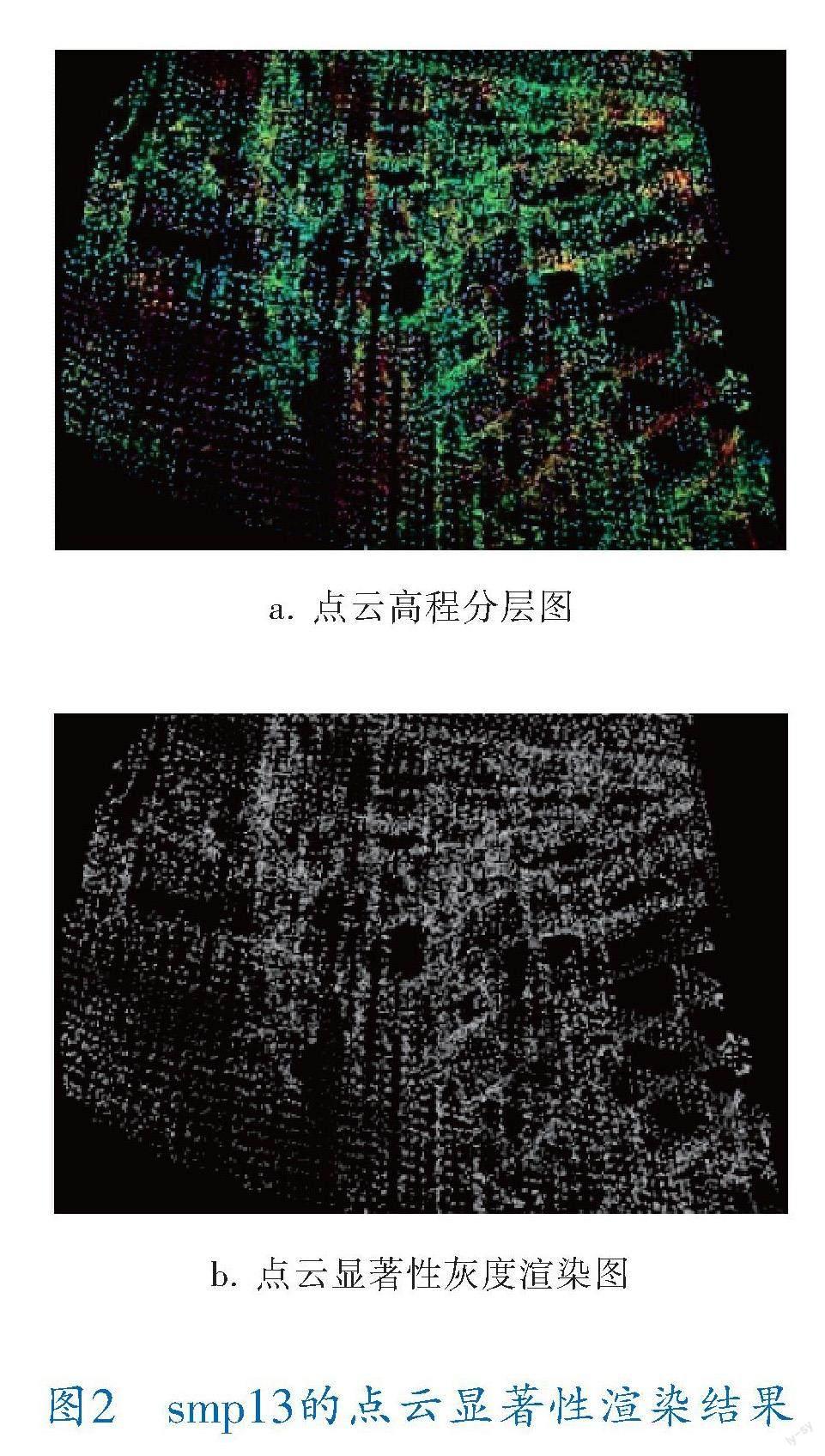
以測試數據集內的smp13為例,采用筆者所提方法對其進行顯著性劃分。圖2為smp13的點云顯著性渲染結果,其中灰度渲染圖內的灰度值取值范圍為0~1。圖2a中,紅色為點云高程值上限,藍色為高程值下限;圖2b中,當灰度值為黑色時代表其顯著性為0,表明顯著性較低,當灰度值為白色時代表其顯著性為1,表明顯著性較高。
2.2? 點云濾波結果
在不同區域類型中分別選取一幅樣本,采用筆者所提方法對其進行濾波處理,并將濾波結果與初始點云進行對比,結果如圖3、4所示。
圖3中,smp13內包含大量小型物體、混合植被與建筑物,地形相對復雜,地面與地物間大量重疊融合。采用筆者所提算法對其進行濾波處理后,除極少量高度較低物體被錯誤歸類外,絕大多數地面同地物都能夠被有效分離。
圖4中,smp26的主要特征表現為地形簡單、地勢平坦,采用筆者所提算法對其進行濾波處理能夠有效分離地面和植被、建筑等地物,說明筆者所提算法具有良好的濾波效果。
2.3? 濾波精度分析
為驗證筆者所提算法的濾波精度,選取交叉表評價體系與Kappa值兩類指標進行濾波精度分析。
交叉表作為一種評價體系(表2),可根據一類錯誤率、二類錯誤率和總體錯誤率對算法濾波性能實施定量分析。其中,一類錯誤率描述的是漏分錯誤率,能夠體現地面點錯分為非地面點的概率,可通過b和e的比值呈現;二類錯誤率描述的是錯分錯誤率,能夠體現非地面點錯分為地面點的概率,可通過c和f的比值呈現;總體錯誤率描述的是點云分類結果同參考數據間存在誤差的概率,可通過b和c的以及和s間的比值呈現。
Kappa值同點云分類結果與參考數據之間的匹配度呈正比例相關。Kappa值計算式如下:
(8)
表3為采用筆者所提算法對測試數據集內各樣本進行濾波處理后所得的結果。可以看出,一類錯誤率、二類錯誤率、總體錯誤率、Kappa值的均值分別為2.53%、2.27%、2.38%、95.10。以上數據充分說明采用筆者所提算法進行機載激光雷達點云濾波具有較高的精度。
3? 結束語
筆者提出一種基于顯著性劃分的機載激光雷達點云濾波優化算法,通過地面顯著性劃分過程提升機載激光雷達點云濾波效果。實驗結果顯示,筆者所提算法能夠高精度實現機載激光雷達點云濾波。在后續研究過程中將主要針對地形分類機制進行深度研究,以進一步優化筆者所提算法。
參? 考? 文? 獻
[1] 徐俊杰,卜令兵,劉繼橋,等.機載高光譜分辨率激光雷達探測大氣氣溶膠的研究[J].中國激光,2020,47(7):411-420.
[2] 汪洋浪,王科未,鄒斌.基于粒子群優化算法的激光雷達實時檢測隧道中心線[J].激光與光電子學進展,2021,58(3):296-304.
[3] 劉浩然,范偉偉,徐永勝,等.基于無人機激光雷達點云數據的單木分割研究[J].中南林業科技大學學報,2022,42(1):45-53.
[4] 張漫,苗艷龍,仇瑞承,等.基于車載三維激光雷達的玉米點云數據濾波算法[J].農業機械學報,2019,50(4):170-178.
[5] 劉帥,欒奎峰,譚凱,等.基于無人機LiDAR點云的多類型植被覆蓋灘涂地形濾波[J].遙感技術與應用,2021,36(6):1272-1283.
[6] 朱依民,田林亞,畢繼鑫,等.基于PTD和改進曲面擬合的高山區水電工程機載激光雷達點云濾波方法[J].水利水電科技進展,2021,41(1):35-40.
[7] 馮發杰,丁亞洲,吏軍平,等.使用顯著性劃分的機載激光雷達點云濾波[J].紅外與激光工程,2020,49(8):26-34.
[8] 馬樂,陸威,姜鵬,等.基于匹配濾波的Gm-APD激光雷達三維重構算法研究[J].紅外與激光工程,2020,49(2):153-160.
[9] 徐旺,官云蘭,張釗,等.結合薄板樣條插值的機載LiDAR漸進形態學濾波算法[J].激光與光電子學進展,2022,59(10):412-421.
[10] 趙明君,劉超,高翔,等.基于多尺度網格的點云自適應坡度濾波算法[J].合肥工業大學學報(自然科學版),2021,44(2):266-272.
[11] 周建紅,楊彪,王華,等.長江中下游河道岸灘低空機載LiDAR點云地形濾波算法[J].河海大學學報(自然科學版),2019,47(1):26-31.
[12] 李豆,李朋飛,穆興民,等.機載LiDAR測量復雜地形中濾波算法的比較研究[J].水土保持研究,2021,28(4):171-178.
[13] 魏碩,趙楠翔,胡以華,等.基于激光雷達通道線掃描特點的單光子去噪算法[J].激光與光電子學進展,2022,59(12):116-122.
[14] 王麗英,趙元丁.一種灰度體素結構分割模型下的機載LiDAR 3D濾波算法[J].地球信息科學學報,2020,22(11):2118-2127.
(收稿日期:2023-01-14,修回日期:2023-10-17)
