刮板式撈渣機斷鏈保護優化簡析
2023-12-26 10:55:52熊澤清
機電信息 2023年24期
張 興 萬 帥 熊澤清 楊 磊
(國能寧夏大壩三期發電有限公司,寧夏 青銅峽 751607)
0 引言
國能寧夏大壩三期發電有限公司的鍋爐采用東方鍋爐股份有限公司設計制造的前后墻對沖燃燒、亞臨界參數自然循環爐,型號為DG2070/17.5-Ⅱ6;撈渣機選用的是青島阿爾斯通四洲電力設備有限公司設計生產的水浸式、液壓驅動、水平可移動、可變速的刮板式撈渣機。該種刮板撈渣機的工作原理如下:渣井下來的高溫爐渣落入撈渣機殼體內,通過殼體內的冷卻水對高溫爐渣進行冷卻,同時保持爐膛與外界隔絕。
冷卻后的爐渣通過撈渣機雙馬達驅動,帶動刮板、鏈條運動,將其連續輸送到爐膛外面的渣倉中,當除渣系統出現故障需要停運時,可暫時關閉撈渣機液壓關斷門,讓爐膛充當渣斗,儲存爐渣,待除渣系統恢復后,可再次投入運行。
在撈渣機運行過程中,鏈條因長時間運行導致疲勞變形或者磨損,會發生斷鏈現象。在運行人員或檢修人員未及時發現時,液壓馬達帶動鏈條繼續轉動,最終鏈條會在局部卡住,一般情況下會造成撈渣機槽體變形損壞、驅動裝置故障。
當設備受損不嚴重時可以隔離除渣系統緊急修復,嚴重時會造成設備嚴重變形,無法短時間修復,最終導致停運機組進行檢修,同時還存在因設備持續受力,損壞崩出的高速物體飛出傷人的風險。
因此,合理設計撈渣機斷鏈保護,提高撈渣機斷鏈保護的可靠性在火電廠安全生產中發揮著重要作用。
1 原撈渣機斷鏈保護設計方式及存在問題分析
1.1 原撈渣機斷鏈保護設計方式
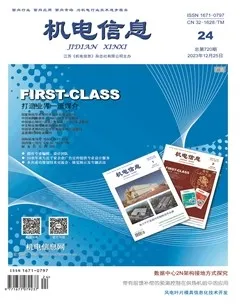
該電廠最初的撈渣機斷鏈保護設計是由兩個外供電AC220 V的接近開關檢測裝在撈渣機張緊輪兩側的鋸齒,當撈渣機正常運轉時,兩個接近開關將得到的脈沖信號經4個時間繼電器組成的信號判斷回路做成保護。時間繼電器分為兩組,每個探頭信號使用兩個時間繼電器,一個使用延時閉合節點,另一個使用延時斷開節點,當任意時間繼電器檢測到在保護設定的延時時間內,接近開關檢測到的開關量信號不翻轉,認為撈渣機鏈條已經停止運行,并發出停止撈渣機液壓馬達運行的保護信號。接近開關的安裝方式及分布情況如圖1所示,撈渣機斷鏈保護原理圖如圖2所示。
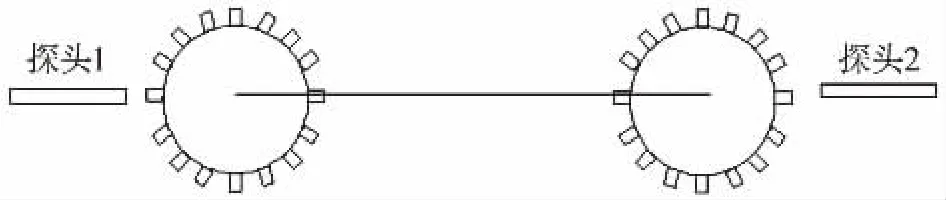
圖1 撈渣機斷鏈保護探頭分布示意圖

圖2 撈渣機斷鏈保護電氣原理圖
1.2 原撈渣機斷鏈保護存在的問題
電廠檢修人員針對2017—2018年撈渣機斷鏈保護動作情況進行分析,造成斷鏈保護動作的原因有撈渣機張緊輪軸躥損壞探頭、時間繼電器故障、接近開關線纜損壞、撈渣機鏈條卡異物、撈渣機斷鏈,經對撈渣機斷鏈保護動作缺陷統計數據進行歸納整理,得到表1。

表1 撈渣機斷鏈保護動作缺陷統計
對表1數據進行分析后發現,在運行過程中,因撈渣機鏈條出現嚴重磨損變形,撈渣機張緊輪軸頻繁左右躥動,頻繁出現因斷鏈保護誤動造成的撈渣機跳停,每次誤動后都需要熱控人員耗費大量時間檢查保護的各個環節,判斷缺陷發生原因[1]。通過大量的故障處理,電廠檢修人員分析引起撈渣機斷鏈保護誤動作的主要原因如下:
1)撈渣機斷鏈保護為單點保護,不滿足熱控檢修規程要求,任意側探頭故障后均會造成斷鏈保護誤動。斷鏈保護接近開關安裝在張緊輪兩側,就地安裝環境非常惡劣,鋸齒形圓盤上經常被灰渣覆蓋,影響接近開關的檢測,造成誤動。因安裝角度有限,無法安裝多個接近開關,無法做到保護信號冗余。在運行過程中,張緊輪會隨著張緊油壓的波動上下躥動,當躥動范圍較大時會拉斷接近開關的信號線,造成斷鏈保護誤動。張緊輪的左右位置靠定位銷固定,在長時間運行后,張緊輪上的定位銷會出現斷裂,張緊輪無法固定,就會出現左右躥動,造成和接近開關的安裝距離發生變化,離得太近會造成開關損壞,離得過遠會造成開關檢測不到,同樣會造成保護誤動。
2)中間繼電器、時間繼電器有使用壽命。經統計,在撈渣機持續運行期間,接近開關約7 s動作一次,中間繼電器和時間繼電器同步得電、失電,其觸頭24 h機械動作1.23萬次,1個月動作37萬次,按照規程要求一般繼電器的可靠電壽命為105次,故在接收頻繁翻轉的開關量信號時,經時間繼電器處理過后的信號存在一定的誤動率和拒動率,會導致斷鏈保護誤動。由于在運行中無法通過正常的檢測手段發現時間繼電器存在的問題,無法可靠預防,不能制定可靠的防范措施,只能通過每月定期更換時間繼電器和中間繼電器來減少誤動的概率,這就大大增加了現場維護人員的工作量和檢修維護的材料成本。
3)斷鏈保護的接近開關為交流220 V,電源取自撈渣機控制柜內控制回路,因控制回路在撈渣機正常運行時無法斷電,在撈渣機運行過程中更換接近開關就存在人身觸電的風險;在撈渣機運行過程中,張緊裝置會上下躥動,張緊輪一直跟隨鏈條轉動,在安裝過程中檢修人員存在機械擠傷的風險;接近開關的安裝位置在撈渣機尾部上方的張緊輪處,距離地面超過2 m,檢修工作存在著高處墜落的風險[2]。
4)因撈渣機設計為PLC控制方式,斷鏈保護接近開關檢測到的信號為中間量,無過程趨勢,故每次撈渣機跳停后都需要耗費大量的時間和精力分析跳閘原因,當一些環境因素無法復現時,就無法準確分析確認真正的跳閘原因,一般處理方式為更換斷鏈保護所有相關設備,包括接近開關和時間繼電器,在增加了檢修人員工作量的同時也增加了檢修材料費用。
5)撈渣機斷鏈保護靠繼電器回路搭接而成,未攝取撈渣機運行信號,未能在遠方實現保護邏輯的自動投切,每次啟動撈渣機時因撈渣機停運過程中斷鏈保護已動作,如果運行人員不在就地切除斷鏈保護,撈渣機就無法正常啟動,增加了運行人員的工作量。應靠邏輯判斷實現撈渣機正常運行后斷鏈保護方起作用,即在撈渣機運行正常后,斷鏈保護自動投入,當撈渣機停運后,斷鏈保護自動退出。
2 斷鏈保護的改造內容
現場檢修人員通過對撈渣機設計說明書、斷鏈保護設計原理及現場設備運行情況的全方位研究,改進撈渣機尾導輪,對撈渣機斷鏈保護進行優化設計,主要完成了以下工作:
1)對撈渣機尾導輪的軸系進行改造,加長了尾導輪,并安裝一5 cm的鋸齒盤。根據分析,除撈渣機的張緊輪能反映鏈條的運行情況以外,撈渣機的尾導輪及從動輪同樣可以反映撈渣機的運行情況,且撈渣機的尾導輪靠軸承固定,安裝更加可靠,運行期間的軸躥較張緊輪更小,在接近開關的測點安裝在鋸齒盤的徑向位置時(圖3),可以有效減少軸向躥動時造成的接近開關損壞問題,基本杜絕了因軸躥動導致的接近開關損壞缺陷發生,同時降低了檢修人員安裝接近開關工作的危險性[3]。
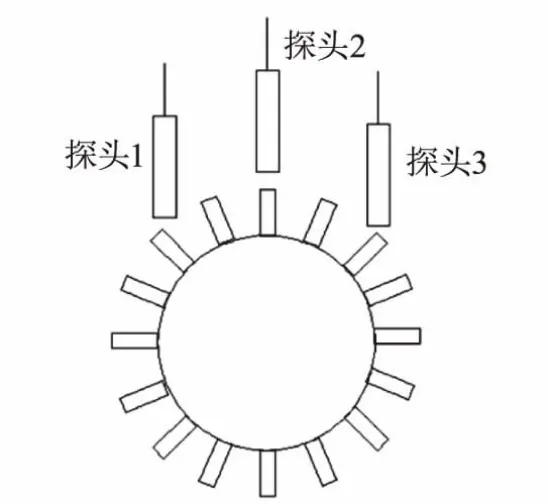
圖3 改造后撈渣機斷鏈保護探頭安裝方式
2)將斷鏈保護的信號由原來的“二取一”改造成三路信號,保護邏輯做成“三取二”(圖4),接近開關的安裝環境得到極大改善,從信號攝取方式上提高了信號的可靠性,降低了保護誤動的可能。
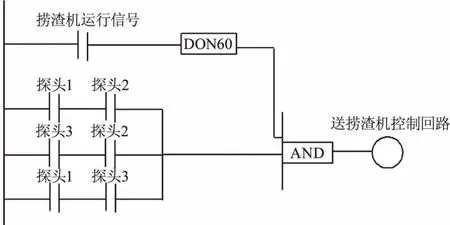
圖4 優化后撈渣機斷鏈保護邏輯
3)將接近開關的信號送至DCS開關量卡件,由DCS控制器替代時間繼電器的作用,由DCS控制器邏輯實現時間繼電器硬接線回路控制功能,將保護動作信號發送至撈渣機就地控制柜中,大大提高了信號的正確率和保護邏輯的可靠性[4]。將撈渣機的運行信號送到DCS系統中,靠DCS邏輯實現斷鏈保護投退的智能判斷,當撈渣機啟動運行正常后,斷鏈保護自動投入,當撈渣機停運后,斷鏈保護自動退出,減少了運行人員啟停撈渣機時手動投退撈渣機斷鏈保護的工作量。
4)將原來的交流220 V接近開關更換成直流48 V接近開關,由DCS開關量卡件直接供電,方便檢修人員更換,杜絕了檢修人員更換探頭過程中人身觸電的可能性,提高了檢修人員維護設備的安全性。
5)將接近開關的信號、撈渣機運行信號及斷鏈保護動作信號增加至DCS歷史庫中,在撈渣機事故跳閘后可以根據DCS歷史趨勢快速判斷是否為斷鏈保護動作導致的撈渣機跳閘,從而快速判斷跳閘原因,及時處理設備問題,縮短了事故分析和事故處理的時間,同時大大減少了因故障原因無法判斷時的大面積、多頻次更換備件產生的維修費用。
3 結束語
電廠熱控人員在對撈渣機斷鏈保護優化改造的過程中,通過將攝取到的熱工保護信號接入DCS并完成保護邏輯設計,克服了PLC和就地控制組合方式下斷鏈保護設計上的先天不足,從根本上杜絕了因信號問題造成的斷鏈保護誤動,降低了檢修人員的作業環境風險,減少了檢修人員在撈渣機斷鏈保護上的維護工作量、運行人員在啟停撈渣機時的操作工作量,節省了撈渣機日常檢修的維護成本,提高了撈渣機設備運行及保護邏輯的可靠性,為機組的安全穩定運行提供了強有力的保障。
猜你喜歡
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00