基于RBFNN的跨座式單軌車輛自動駕駛滑模控制研究
2023-12-27 08:01:14劉浩鳴杜子學(xué)鄔浩鑫侯忠偉
重慶交通大學(xué)學(xué)報(自然科學(xué)版) 2023年12期
關(guān)鍵詞:指令
,劉浩鳴,杜子學(xué),鄔浩鑫 ,侯忠偉
(1.重慶交通大學(xué) 機電與車輛工程學(xué)院,重慶 400074;2.重慶交通大學(xué) 交通運輸學(xué)院,重慶 400074)
0 引 言
隨著人工智能、互聯(lián)網(wǎng)等新技術(shù)發(fā)展,城市軌道交通駕駛的自動化成為了國內(nèi)外發(fā)展趨勢。在日本、韓國、法國以及新加坡等地及我國上海地區(qū)均有全自動駕駛的城市軌道交通線路。城市軌道交通列車的自動駕駛可有效提升運行效率,降低運營成本,減少工作人員失誤,提升列車運行品質(zhì)[1]。
跨座式單軌交通是城市軌道交通的一種典型制式,相較地鐵交通具有成本低、噪音低、轉(zhuǎn)彎半徑小等優(yōu)點,是城市軌道交通建設(shè)的重要選擇。重慶軌道交通2、3號線是我國目前成功運營的中大運量跨座式單軌交通線路。現(xiàn)行重慶跨座式單軌是以ATO模式即半自動駕駛的方式運行,為提升跨座式單軌交通的運行效率,進行跨座式單軌交通全自動駕駛關(guān)鍵技術(shù)研究很有必要。
控制算法是保障跨座式單軌全自動駕駛的核心技術(shù)之一,已有的城市軌道交通全自動駕駛相關(guān)控制技術(shù)及控制算法,是開展跨座式單軌全自動駕駛研究的重要借鑒與基礎(chǔ)。目前主流的城市軌道交通自動控制算法有經(jīng)典PID算法以及基于PID的改進算法[2-3]、基于有限時間控制理論的算法[4-5]、滑模算法[6]、神經(jīng)網(wǎng)絡(luò)優(yōu)化算法[7-8]等。PID算法依賴精確的模型,魯棒性上有所欠缺;有限時間算法中收斂時間的上界一定程度上取決于系統(tǒng)的初始狀態(tài),限制了工程實際應(yīng)用;滑模算法具有強魯棒性、實時性好的優(yōu)點,同時神經(jīng)網(wǎng)絡(luò)也可以優(yōu)化模型和系統(tǒng)。V.ANDRIEU等[9]最早提出了固定時間穩(wěn)定的概念;A.POLYAKOV[10]提出了固定時間Lyapunov穩(wěn)定性理論。
借鑒以上研究,筆者提出了一種基于徑向基神經(jīng)網(wǎng)絡(luò)(RBFNN)的跨座式單軌固定時間滑模控制方法,以提高魯棒性和工程實用性。首先建立基于RBFNN的跨座式單軌動力學(xué)模型,提出了基于RBFNN的跨座式單軌固定時間滑模控制算法,設(shè)計基于RBFNN的跨座式單軌固定時間滑模控制器(后稱RBFFTSMC),并通過數(shù)值仿真驗證所提出的控制算法的有效性。
1 跨座式單軌動力學(xué)模型
跨座式單軌動力學(xué)模型是控制方法研究的基礎(chǔ)。基于質(zhì)點模型的指導(dǎo)思想和列車牽引動力學(xué)理論,進行跨座式單軌運行受力分析,詳細的動力學(xué)模型見文獻[11]。
文獻[11]中f2(p,v,t)作為附加運行阻力,包括曲線阻力、坡道阻力、隧道阻力以及其他因素導(dǎo)致的阻力,受時間、區(qū)段影響很大,難以建立統(tǒng)一精確的模型,可將其看作是關(guān)于位置、速度的時變函數(shù)。利用RBFNN可以逼近任意非線性函數(shù)的特性來逼近f2(p,v,t)以達到提高控制精度的目的。RBFNN是一種前饋神經(jīng)網(wǎng)絡(luò), 它由輸入層、隱含層、輸出層共三層網(wǎng)絡(luò)構(gòu)成, 其網(wǎng)絡(luò)結(jié)構(gòu)如圖 2。
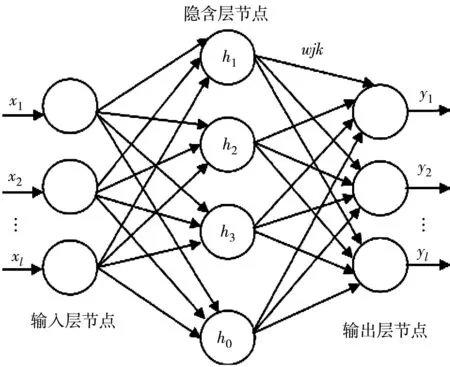
圖1 RBFNN結(jié)構(gòu)
輸入層如式(1):
X=[x1,x2,…,xl]T
(1)
式中:l為輸入的維數(shù)。
隱含層如式(2):
h=[h1,h2,…,ho]T
(2)
式中:o為隱含層節(jié)點個數(shù)。
用高斯函數(shù)作為基函數(shù)則有:
(3)
式中:Cj為隱含層高斯基函數(shù)的中心向量;σ為隱含層高斯基函數(shù)的寬度。
神經(jīng)網(wǎng)絡(luò)權(quán)值如式(4):
W=[w11,…,wjk]T
(4)
輸出層如式(5):
Y=[y1,y2…,yl]=WThj(x)
(5)
用RBFNN來逼近f2(p,v,t),神經(jīng)網(wǎng)絡(luò)的理想輸出如式(6):
f2=W*Th(x)-ε
(6)
式中:W*T為RBFNN理想權(quán)值;h(x)為隱含層高斯函數(shù)輸出向量;ε為逼近誤差。
定義神經(jīng)網(wǎng)絡(luò)的實際輸出如式(7):
(7)

定義RBFNN誤差如式(8):
(8)
定義RBFNN權(quán)值誤差如式(9):
(9)
取如式(10)的狀態(tài)變量:
(10)
綜合式(1)~式(10),可以得到基于RBFNN的跨座式單軌的動力學(xué)模型為:
(11)
2 跨座式單軌固定時間滑模控制
跨座式單軌在行駛中目標是準確跟蹤控制中心發(fā)出的或預(yù)先設(shè)定的速度-距離曲線指令。
2.1 控制器設(shè)計
為方便RBFFTSMC設(shè)計,給出如下引理:
引理1[10]對于非線性系統(tǒng)式(11),如果存在一個連續(xù)徑向無界函數(shù)V:Rn→R+∪{0}滿足:
V(x)≤-k3Vz(x)-k4Vg(x)
(12)
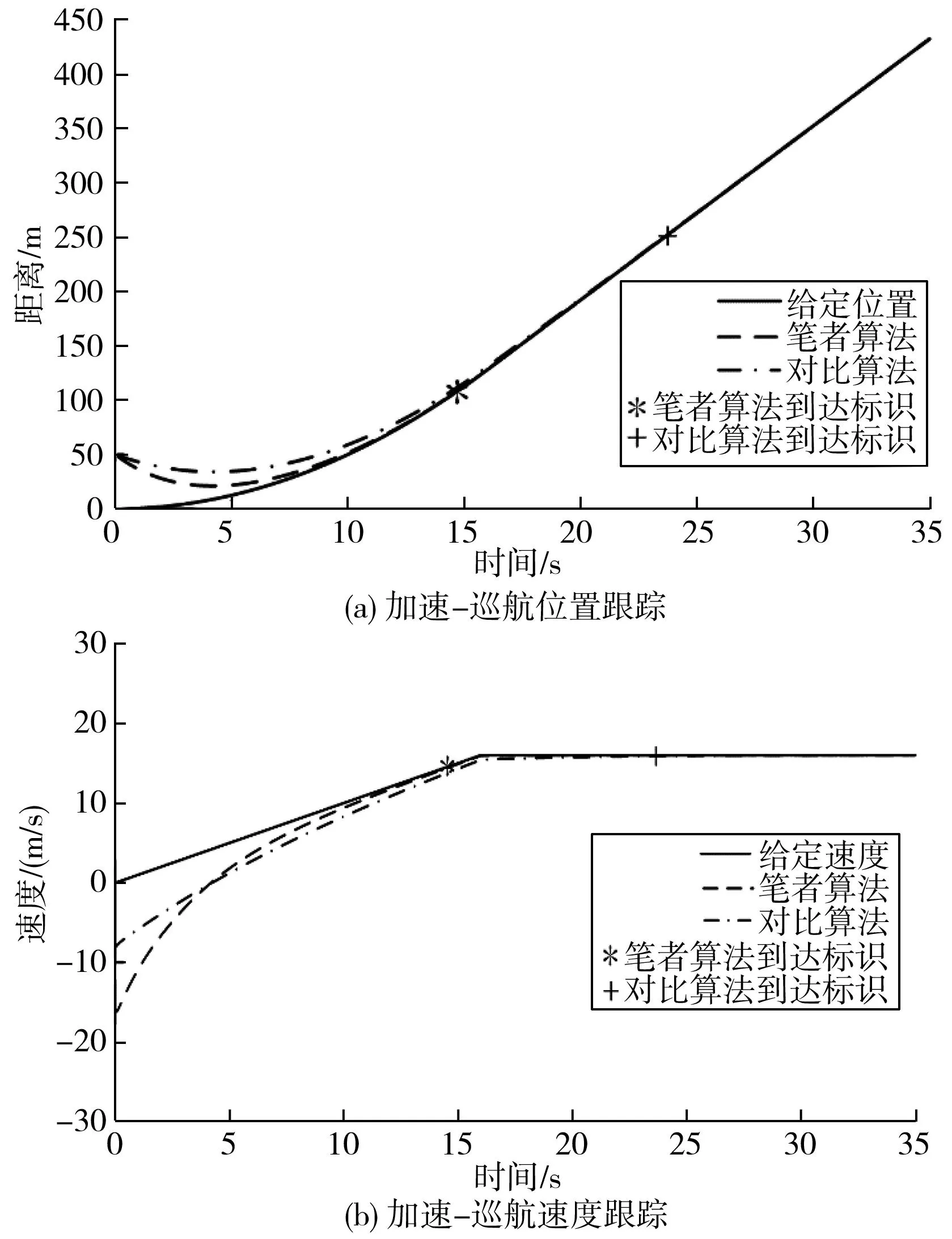
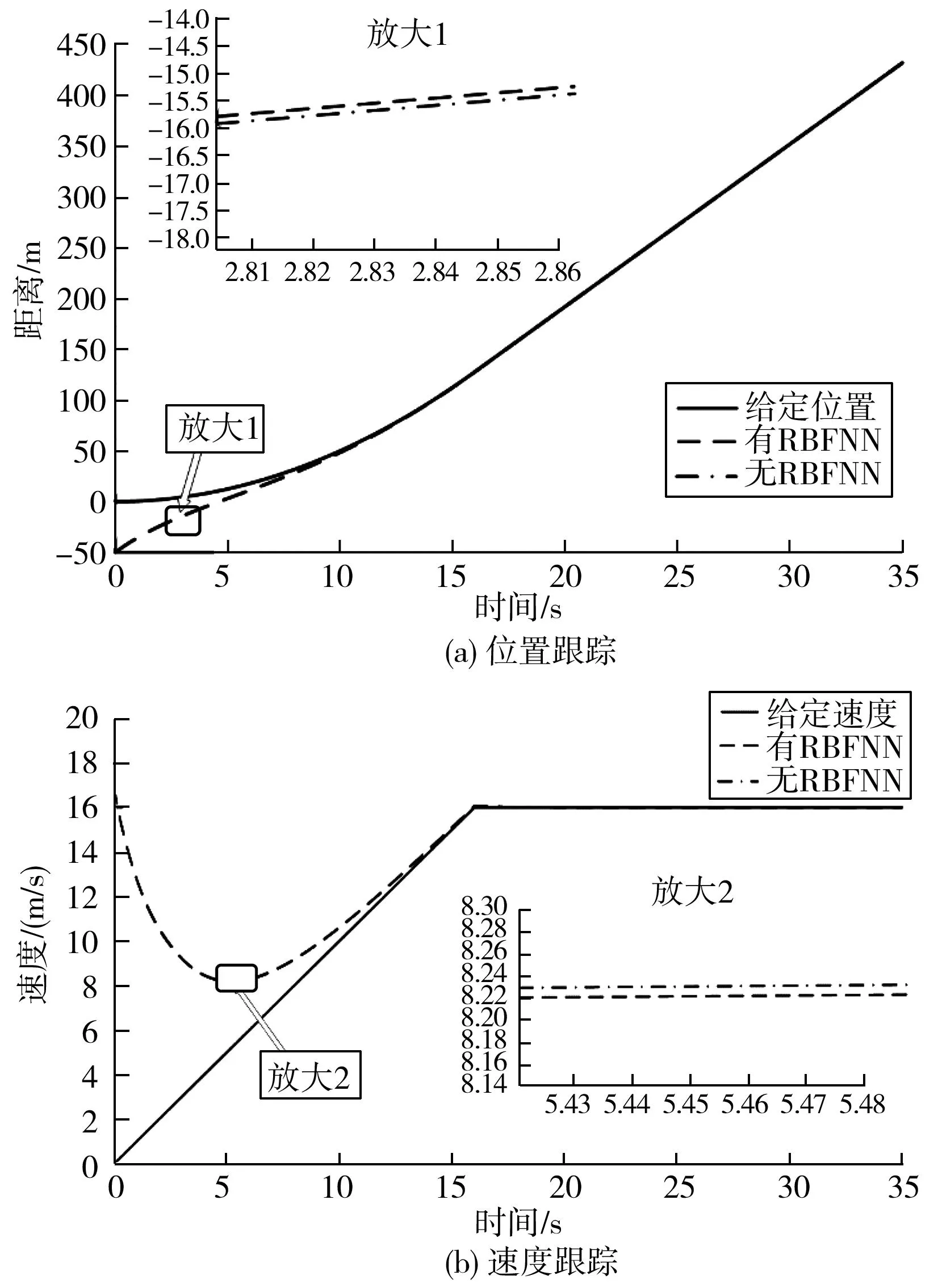
式中:k3,k4>0,z>1,0 此時系統(tǒng)式(11) 為全局固定時間穩(wěn)定, 其收斂時間T1滿足: (13) 引理2對于非線性系統(tǒng)式(11),如果存在一個連續(xù)徑向無界函數(shù)V:Rn→R+∪{0}滿足: V(x)≤-k3Vz(x)-k4Vg(x)+η1 (14) 式中:k3,k4>0,z>1,0 此時系統(tǒng)式(11) 為實際固定時間穩(wěn)定[12-13], 其收斂時間T2滿足: (15) 式中:ζ為正的常數(shù), 并滿足0<ζ<1。 式(11)解的殘差集為: (16) 對于跨座式單軌車輛,給出如下定義: (17) 式中:ep為跨座式單軌車輛位置誤差;pr為車輛位置指令;p為車輛位置;ev為車輛速度誤差;vr為車輛速度指令;v為車輛速度。 為同時兼顧收斂速度和平滑性,選取滑模面s如式(18): (18) (19) 式中:γ2,β2為正數(shù);z2,n2,g2,q2為正奇數(shù),且滿足z2>n2,g2 對式(18)求導(dǎo)得到: (20) 式(20)結(jié)合式(11)、式(17)可以得到: (21) 式(21)結(jié)合式(19)可以得到: (22) (23) 定理1對于非線性系統(tǒng)式(11)的跨座式單軌車輛,當選用滑模面式(18)及控制器式(22)時,系統(tǒng)為全局穩(wěn)定且滿足跨座式單軌車輛位置誤差ep和速度誤差ev于固定時間Tp內(nèi)收斂至零, 其中Tp滿足式(24): Tp≤T1+T2 (24) 即跨座式單軌車輛在固定時間Tp內(nèi)跟蹤到位置指令和速度指令。 證明:首先,當系統(tǒng)到達滑模面時,根據(jù)選取的滑模面式(18)可以有式(25): (25) 根據(jù)引理1可得滑模運動階段的時間滿足: (26) 再選取Lyapunov函數(shù)如式(27): (27) 對 Lyapunov 函數(shù)V2求導(dǎo), 綜合式(1)~式(11)、式(17)、式 (20),可得: (28) 式中:ε1為跨座式單軌車輛理想神經(jīng)網(wǎng)絡(luò)輸出的逼近誤差。 設(shè)計自適應(yīng)律為: (29) 則有: (30) (31) 根據(jù)引理2,可得非線性系統(tǒng)式(11) 是實際固定時間穩(wěn)定的, 收斂時間T2滿足: (32) 式中:z=z2/n2,g=g2/q2 系統(tǒng)狀態(tài)在固定時間T2內(nèi)收斂到緊集Ω: (33) 證畢。 可以發(fā)現(xiàn),筆者設(shè)計的控制器可以使跨座式單軌車輛在固定時間Tp內(nèi)跟蹤上預(yù)設(shè)的速度-距離曲線指令。 對筆者設(shè)計的控制算法進行仿真驗證,構(gòu)建跨座式單軌一般行駛場景。為了節(jié)約仿真時間,將仿真對象按比例縮小,對結(jié)果有效性沒有影響。 仿真中將文獻[15]中的有限時間滑模控制算法作為對比分析的對象,跨座式單軌車輛的質(zhì)量為4 000 kg,初始位置為50 m,初始速度為-10 m/s,控制器參數(shù)設(shè)置可見文獻[11]。 跨座式單軌在加速-巡航行駛時,筆者控制算法控制單軌車輛以及對比算法的位置和速度的追蹤圖如圖2。 圖2 加速-巡航行駛控制器跟蹤對比 由圖2可知:筆者算法控制車輛在15 s以內(nèi)位置和速度均準確地跟蹤到指令曲線,對比算法在24 s才跟蹤到指令曲線。 筆者所設(shè)計控制器式(22)中,即使對附加運行阻力f2(p,v,t)做粗略的估計而不用RBFNN去逼近,跨座式單軌仍可在固定時間內(nèi)跟蹤到指令曲線,但是用RBFNN逼近運行附加阻力f2(p,v,t),可以使系統(tǒng)的響應(yīng)更快,跟蹤過程中的誤差更小,下面進行仿真對比,仿真中兩種算法的區(qū)別是有無RBFNN逼近附加運行阻力f2(p,v,t)。 仿真中假定,RBFNN的參數(shù)設(shè)置如下:神經(jīng)網(wǎng)絡(luò)權(quán)值W的初始值為零矢量,隱含層的中心矢量:Cj=[100,200,380,700,1 000,0,100,200,380,700,0];σ=30;結(jié)果如圖3。 圖3 加速-巡航行駛控制器有無RBF跟蹤對比 由圖3可知:領(lǐng)航車輛的初始位置和速度分別是-50 m,17 m/s,有RBFNN在位置跟蹤上比無RBFNN更加接近位置指令約0.1 m,有RBFNN時在速度跟蹤上比無RBFNN更加接近速度指令約0.01 m/s。 筆者進行了跨座式單軌全自動駕駛算法研究,結(jié)論如下: 1)提出了基于RBFNN的跨座式單軌固定時間滑模控制方法,運用RBFNN的逼近特性來逼近時變附加運行阻力f2(p,v,t),并設(shè)計了基于RBFNN的跨座式單軌固定時間滑模控制器。 2)對控制算法的有效性進行了仿真實驗,結(jié)果表明,筆者設(shè)計的算法具有較強的魯棒性和工程實用性。 3)筆者設(shè)計的有RBFNN控制器控制車輛在15 s以內(nèi)位置和速度均準確的跟蹤到指令曲線,具有較好的控制性能,收斂速度較快。


2.2 控制器穩(wěn)定性證明


3 仿真實驗
3.1 控制器仿真
3.2 有無RBFNN對比
4 結(jié) 論
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10測控技術(shù)(2018年5期)2018-12-09 09:04:26電子測試(2018年18期)2018-11-14 02:30:34電信科學(xué)(2016年10期)2016-11-23 05:11:56時代農(nóng)機(2015年3期)2015-11-14 01:14:29科技傳播(2015年20期)2015-03-25 08:20:30信息安全研究(2015年3期)2015-02-28 20:18:12西安航空學(xué)院學(xué)報(2014年5期)2014-07-13 01:27:52家電科技(2014年5期)2014-04-16 03:11:28汽車零部件(2014年2期)2014-03-11 17:46:27