壓縮機用高速永磁同步電機新型弱磁控制研究
2023-12-28 08:51:36李燕
微特電機 2023年11期
李 燕
(1.珠海格力電器股份有限公司,珠海 519070; 2.廣東省高速節能電機系統企業重點實驗室,珠海 519070)
0 引 言
高速永磁同步電機(以下簡稱HS-PMSM)具有轉速高、功率密度大、效率高等優勢,被廣泛應用于工業壓縮機、新能源車等領域[1-3]。弱磁是HS-PMSM提升調速能力的有效措施,國內外研究學者對弱磁控制策略展開了大量研究。
目前常用的弱磁控制方法主要有直接計算法、查表法、電壓反饋法。直接計算法[4]根據模型公式及約束條件求極值得出弱磁時的d,q軸電流指令值,該方法嚴重依賴電機參數,參數誤差極易影響控制性能;查表法[5]需要先通過大量試驗標定出不同扭矩及轉速下的d,q電流指令值,然后制定相應的控制表格,該方法控制性能較好,不依賴電機參數,但試驗標定繁瑣;電壓反饋法[6-7]主要通過實際交流輸出電壓與逆變器能輸出的最大電壓的差值進行PI調節,得出弱磁調節相角或d軸負補償電流,該方法不依賴電機參數且通用性強,實際工程中應用較多。以上弱磁方法都同時需要d軸及q軸電流調節器,但隨著轉速的上升,d,q軸耦合影響加劇,導致高速驅動控制性能變差,嚴重時甚至引發系統失穩。
為解決高速弱磁控制時交直軸耦合加劇帶來的影響,文獻[8]提出單電流調節的全新弱磁拓撲,跳出了從電流分配角度規劃弱磁軌跡的思維定式,摒棄了對矢量控制系統中d,q軸電流進行解耦控制的常規做法,而是利用d,q軸間的耦合關系,弱磁時僅對d軸進行電流調節得出d軸電壓,q軸電壓直接給定。該方法具有弱磁能力強、動態響應快、魯棒性強的優點,但是如何給定q軸電壓是關鍵。文獻[8]采用固定交軸電壓,交軸電壓為固定常數,是最早的電壓給定方式,該方法無法充分利用直流母線電壓,電機效率和負載能力在不同工作狀態下不能得到最優。文獻[9]先離線通過實驗得出轉矩、轉速及q軸電壓的關系,再制定三維表格,應用時通過查表獲得弱磁時的q軸電壓。該方法雖然能得到較好的控制效果,但需要提前開展大量實驗,可移植性差。文獻[10]以最小定子電流為目標,提出基于梯度下降法的單電流調節控制系統,統一實現MTPA(最大轉矩電流比)控制及弱磁控制。基于梯度下降修正q軸電壓給定,電壓修正方向取決于向量積(與電機參數相關),因此該方法對電機參數有較強的依賴性,魯棒性不高。文獻[11]以電機輸出扭矩最大為目標,提出將弱磁工作點定在電流極限圓及電壓極限橢圓的交點處,通過交點處的模型公式給定q軸電壓,該方法同樣依賴電機參數,魯棒性不高。文獻[12-14]基于弱磁時將工作點限制在電壓極限橢圓可以最大利用直流母線電壓的原理,提出通過最大輸出電壓與d、q軸電壓的關系,實時自動調節q軸電壓。該方法需要對全速域內的MTPA與弱磁控制模式的切換策略進行研究。文獻[15-16]提出一種間接自動調節q軸電壓的方法,弱磁工作點同樣限制在電壓極限橢圓上,弱磁時通過d軸電流調節器輸出電壓相位角,然后根據該角度及最大輸出電壓計算出d,q軸電壓給定,該方法與文獻[12-14]中所提出的方法原理類似,同樣涉及MTPA與弱磁控制的模式切換。
綜上所述,本文結合壓縮機電機的負載特性,提出一種基于電壓限幅的新型單電流弱磁控制策略,巧妙地通過對q軸電壓進行動態限幅,在一個控制拓撲下實現中低速弱磁時雙電流調節模式及高速弱磁時單電流調節模式的自然過渡,解決了常用的電壓反饋弱磁控制方法受高速電流耦合影響的問題,提高了弱磁的動態響應,同時相比現有的單電流弱磁方法,無需單獨研究模式切換策略,簡化了控制拓撲,通過仿真及實驗驗證了本文提出方法的有效性。
1 壓縮機電機的穩態工作點分析
本文研究的HS-PMSM主要應用于離心壓縮機或工業空壓機中,以下簡稱壓縮機電機,壓縮機葉輪負載的負載轉矩與轉軸轉速的平方成正比,電機負載轉矩與轉速的關系曲線如圖1所示。

圖1 壓縮機電機負載轉矩曲線
HS-PMSM在d,q同步旋轉坐標系下的穩態電壓方程:
(1)
式中:R為定子相電阻;Ld,Lq分別為電機的直軸電感及交軸電感;ψf為轉子磁鏈;id,iq分別為直軸電流及交軸電流;ud,uq分別為直軸電壓及交軸電壓;ω為轉子旋轉電角速度。
轉矩方程:
Te=1.5p[ψfiq+(Ld-Lq)idiq]
(2)
式中:Te為電機轉矩;P為電機極對數。
電機的輸出端電壓受限于變頻器的直流母線電壓,電流也受限于變頻器的最大允許電流,高速旋轉時電壓穩態方程中的定子電阻壓降可忽略,因此電機工作時的電壓電流約束方程可簡化:
(3)
壓縮機升速過程中電機負載轉矩增加,與常規永磁同步電機基速以下恒轉矩運行、基速以上恒功率運行的工作特性不同,因此其弱磁穩態工作點軌跡也不一樣,壓縮機電機在d,q坐標軸下的矢量控制軌跡如圖2所示,圖2中的電流極限橢圓及電壓極限橢圓由式(3)決定,MTPA為最大轉矩電流比曲線,MTPV為最大轉矩電壓比曲線。
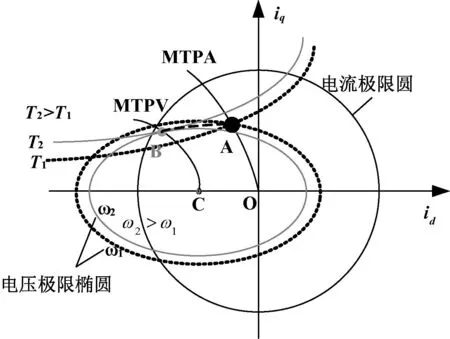
圖2 壓縮機電機控制軌跡示意圖
壓縮機電機先沿圖2中的OA曲線升速加載,采用MTPA控制,轉速及轉矩逐漸增加。當工作在A點時,為MTPA曲線、轉矩曲線及電壓極限橢圓的交點,運行角速度為ω1,電機轉矩為T1,此時電機的輸出端電壓達到變頻器的輸出最大電壓;當電機轉速需要進一步增加至ω2時,由于輸出電壓已達極限,無法再按MTPA軌跡升頻,且隨著轉速上升電壓橢圓范圍將縮減,轉矩也會同步增加至T2,電機將按圖2中AB曲線弱磁運行,B點為可運行的最高轉速點,此工作點為轉矩曲線與電壓極限橢圓的相切點。從圖2可看出,壓縮機電機弱磁時只工作在弱磁I區,穩態工作點為電壓極限橢圓與轉矩曲線的交點,不會運行至BC曲線的弱磁II區,d軸電流在弱磁時始終朝著負向增大的方向。
為實現最大利用直流母線電壓,電機在弱磁I區工作時,端電壓始終滿足式(4)的電壓極限方程,這也是本文所研究的新型弱磁控制策略的關鍵。
(4)
2 基于電壓限幅的新型單電流弱磁控制策略
現有研究的單電流控制方法中,基于電壓極限橢圓的自適應變交軸電壓法直流母線電壓利用率高,且不依賴電機參數,易于工程實現,采用該方法的電機矢量控制框圖如圖3所示。圖3中的轉速及轉子位置反饋可以通過傳感器獲得或者通過高精度的無傳感控制方法得到。
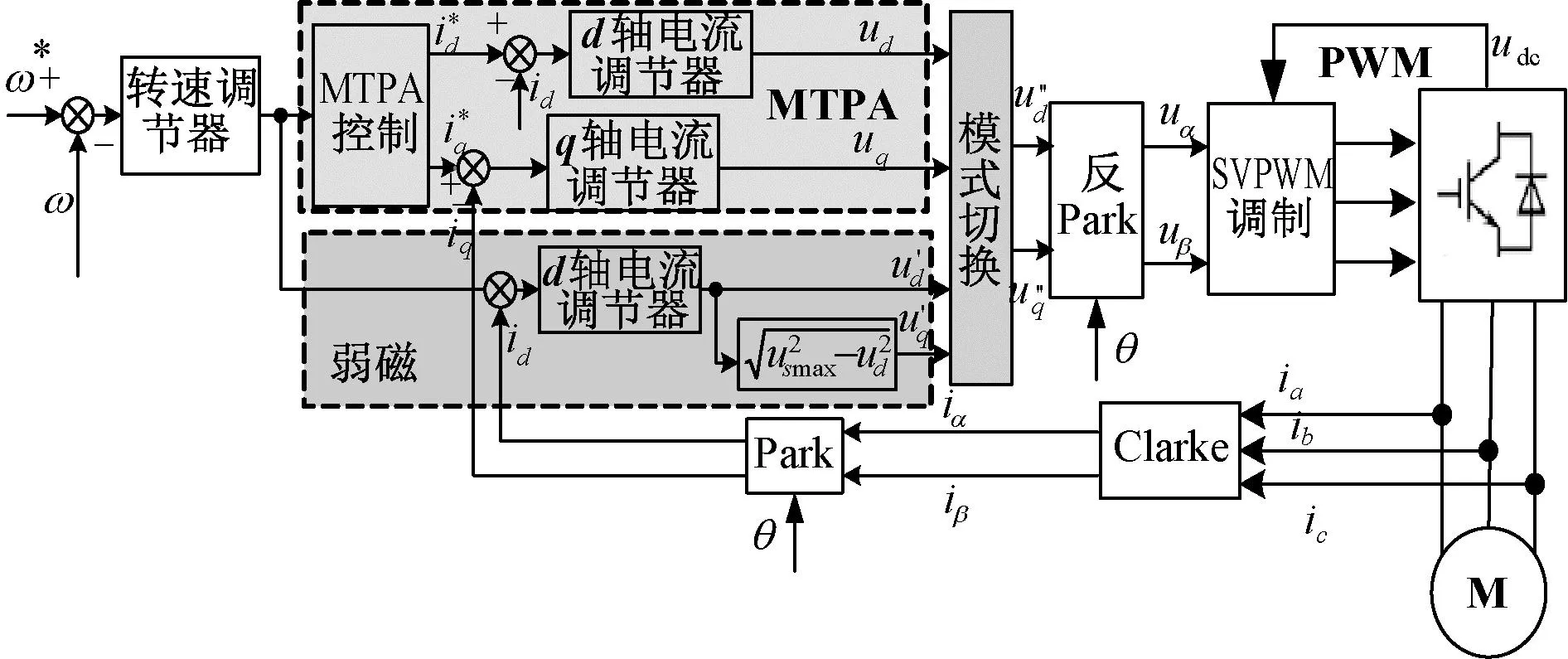
圖3 變交軸電壓單電流弱磁控制框圖
圖3中的內環電流控制包括兩種工作模式:MTPA雙電流調節模式及弱磁單電流調節模式。MTPA控制模式下,d,q軸分別采用兩個獨立的電流調節器,d,q軸的電流指令通過對外環轉速環的輸出按MTPA角分配所得。弱磁模式下僅有d軸電流調節器,轉速外環的輸出為d軸電流的指令值,d軸電壓為電流調節器的輸出,q軸電壓通過式(4)實時計算。在電機升頻加載及減速卸載時存在兩種工作模式的切換,需要對進入弱磁及退出弱磁的工作切換點進行識別判斷,控制較復雜,且模式切換時可能會引發電流沖擊,存在控制不穩定的風險。
本文提出一種基于電壓限幅的新型單電流弱磁控制策略,系統控制框圖如圖4所示。圖4中的轉速及轉子位置反饋可以通過傳感器獲得或者通過高精度的無傳感控制方法得到。轉速外環的輸出經過MTPA角分配后分別為d,q軸的電流指令;d軸電流調節器的輸出為d軸電壓;q軸電壓為q軸電流調節器的輸出與q軸電壓動態限幅值二者取最小值。為防止q軸電流調節器積分飽和,在PI調節基礎上引入q軸電壓退飽和控制,d軸電流調節一般采用普通的PI調節。下面對具體的控制原理及電機控制過程進行分析。
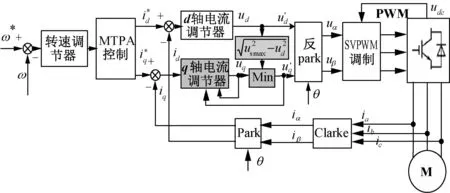
圖4 基于電壓限幅的新型單電流弱磁控制框圖
壓縮機電機從低速開始時,電機端電壓小于變頻器的最大輸出電壓,即滿足:
(5)
由式(5)可知,此時q軸電壓滿足:
(6)
因此,q軸電壓為q軸電流調節器的輸出,即u′q=uq,d,q軸電流被控制跟蹤在指令電流,由于電流指令值是轉速外環的輸出值按MTPA角分配的,所以,此時電機工作在MTPA控制模式,內環為雙電流調節。
當壓縮機電機進一步升頻加載至端電壓達到變頻器的輸出最大電壓時(圖2中的A點),且在此基礎上進一步升頻,由于壓縮機電機負載轉矩也隨轉速增加而增加,由圖2可知,MTPA控制下,工作點將沿MTPA曲線向上運動,超出電壓極限橢圓,此時q軸調節器的輸出電壓:
(7)
q軸電壓將不再等于q軸調節器的輸出,而是等于由d軸電壓及變頻器最大輸出電壓計算出來的動態限幅值,即:
(8)

(9)
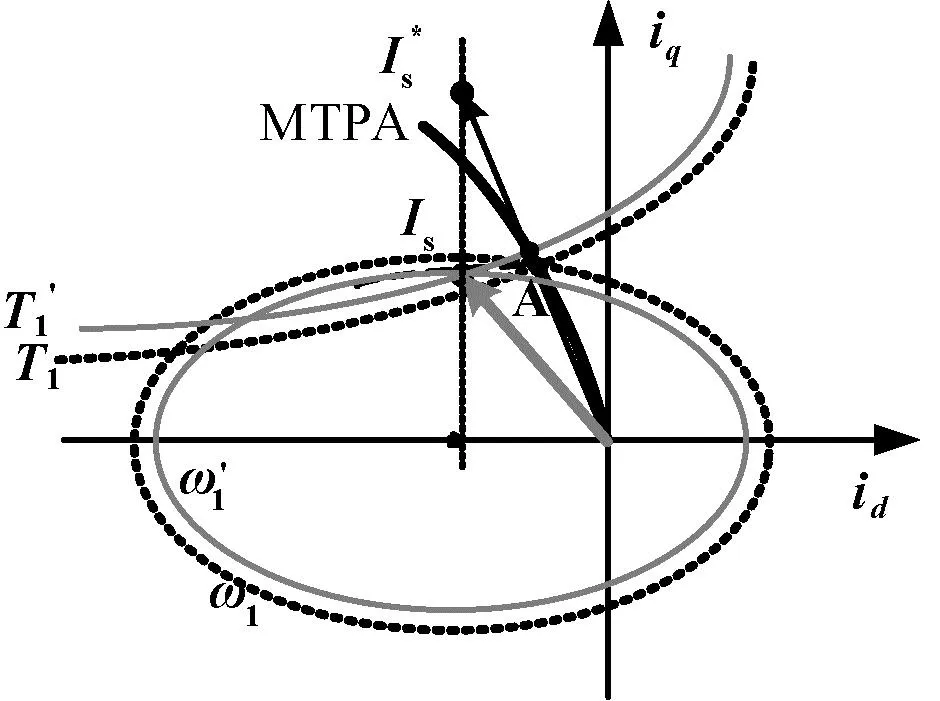
圖5 電流控制過程分析示意圖
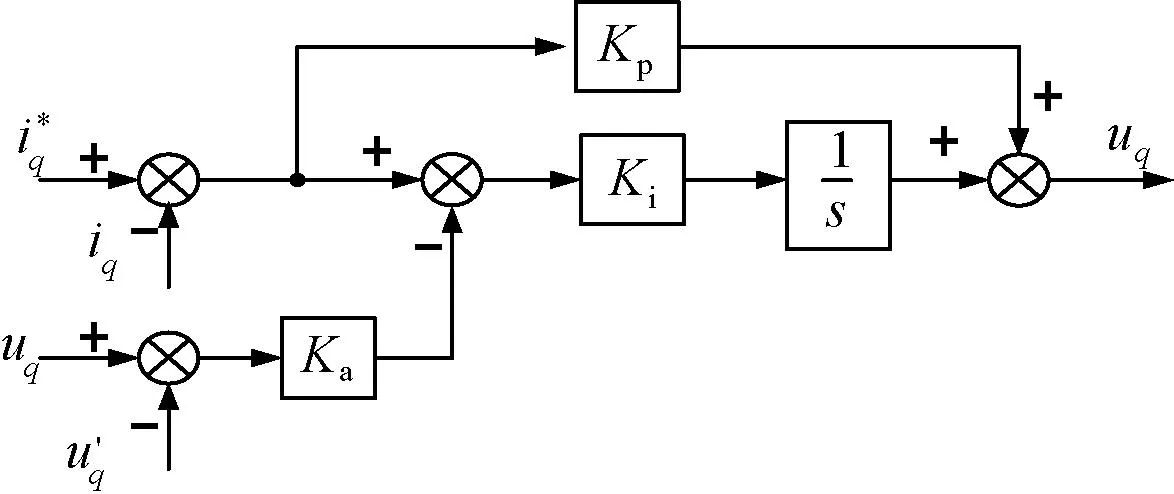
圖6 q軸電流調節器控制原理圖

以上是升頻過程的分析,能實現從MTPA控制模式進入弱磁控制模式的自然過渡。降頻時的控制原理類似,降頻時轉速指令值減小,轉速外環調節器的輸出值減小,d軸指令電流也將負向減小,q軸電流指令值也會變小,相應的q軸電流調節器的輸出會逐漸接近于動態限幅值,當二者相等時實現了弱磁控制模式到MTPA控制模式的自然過渡,q軸電流調節器開始正常工作,q軸電流實際值將跟蹤指令值,之后再降頻時系統將一直工作在MTPA控制模式。
3 仿真分析
基于以上分析,為了驗證本文提出的新型弱磁控制策略的效果,分別采用基于電壓限幅的新型單電流弱磁控制策略及常規的電壓反饋雙電流弱磁控制策略,搭建了HS-PMSM矢量控制系統仿真模型,并進行了仿真對比,電機主要參數如表1所示。

表1 電機主要參數
該電機的額定轉速為16 500 r/min,電頻率為550 Hz。仿真時為了看出電機進入弱磁及退出弱磁的全過程,電機轉速逐步升高至最高轉速然后再降速,電機的負載轉矩按照前面分析的壓縮機電機的負載特性設置成與轉速的平方成正比。
常規的電壓反饋雙電流弱磁控制的仿真結果如圖7所示。電機升頻過程中,在10.9 s左右,電機運行頻率升頻至約540 Hz時,控制系統失穩,d,q軸電流調節失敗。可見,雙電流調節弱磁易受d,q軸之間的交叉影響,嚴重時系統失穩。
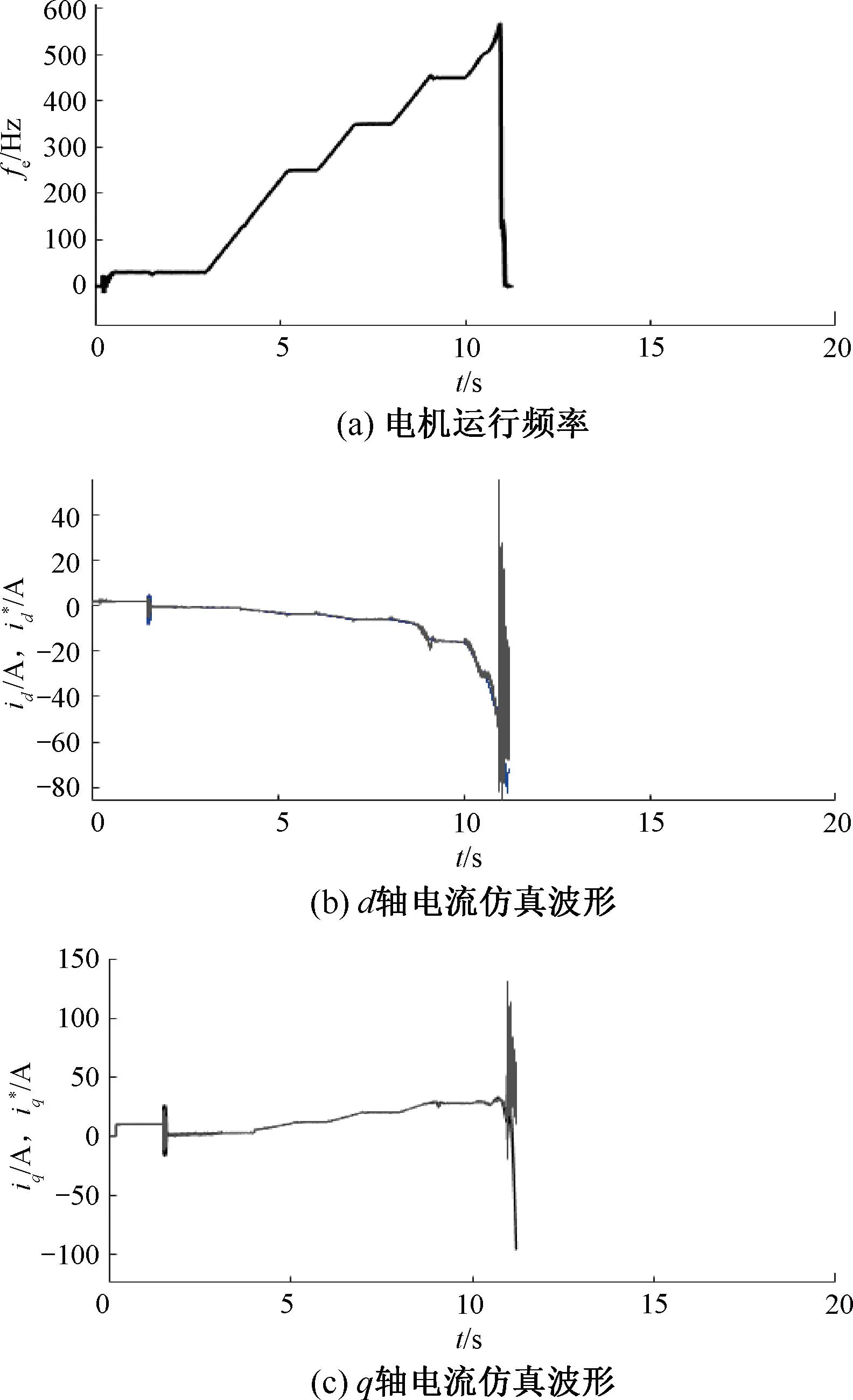
圖7 電壓反饋雙電流弱磁控制仿真結果
新型單電流弱磁控制的仿真結果如圖8所示。電機在升降頻過程均較穩定,圖8(a)、圖8(b)分別為電機運行頻率及輸出轉矩波形,電機能按設定轉速運行帶載運行。圖8(c)、圖8(d)分別為電機的d軸電流指令值和實際值以及q軸電流指令值及實際值變化波形,顯示的電流值均為按除以10定標的數值。
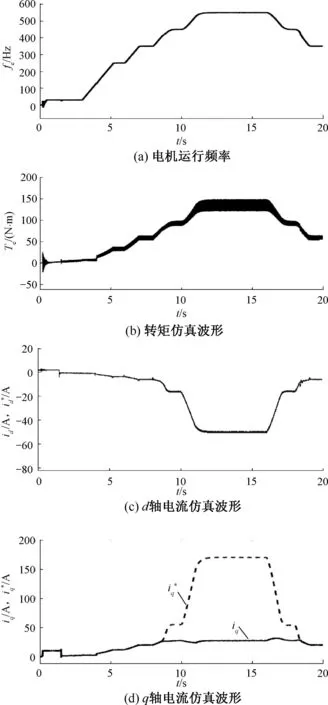
圖8 新型單電流弱磁控制仿真結果
從圖8(c)、圖8(d)的仿真波形可看出,電機升頻過程中,在8.5 s左右,電機運行頻率升頻至約400 Hz時開始自動進入弱磁,q軸電流調節器失效,q軸電流的實際值與指令值不相等,僅d軸電流調節器正常工作,實際值能跟蹤上指令值,由前文分析可知,此時q軸電流的指令值是按MTPA角分配的,會比實際值大很多。電機降頻過程中,在18.5 s左右,電機降頻至約400 Hz時開始系統自動退出弱磁開始MTPA控制,q軸電流實際值又能重新跟蹤上指令值,d,q軸電流調節器均能正常工作。上述仿真結果顯示的電流軌跡與本文理論分析的結果基本一致。可見,基于電壓限幅的新型單電流弱磁控制策略,在一個控制拓撲下能實現中低速弱磁時雙電流調節模式及高速弱磁時單電流調節模式的自然過渡,實現了全速域的穩定帶載運行,解決了高速下d,q軸之間交叉耦合的影響問題。
同時,還對兩種弱磁策略下的動態調節能力進行了仿真,在8 s時突然降低電網電壓至原來的80%,仿真結果如圖9所示。從仿真結果可看出,電壓反饋雙電流弱磁方法下,電網電壓突降后,系統無法調節穩定,運行頻率達到450 Hz時系統失穩。而在本文的弱磁控制策略下,電網電壓突降后,系統依然能穩定運行,可見本文的新型單電流弱磁控制的動態響應能力較好。
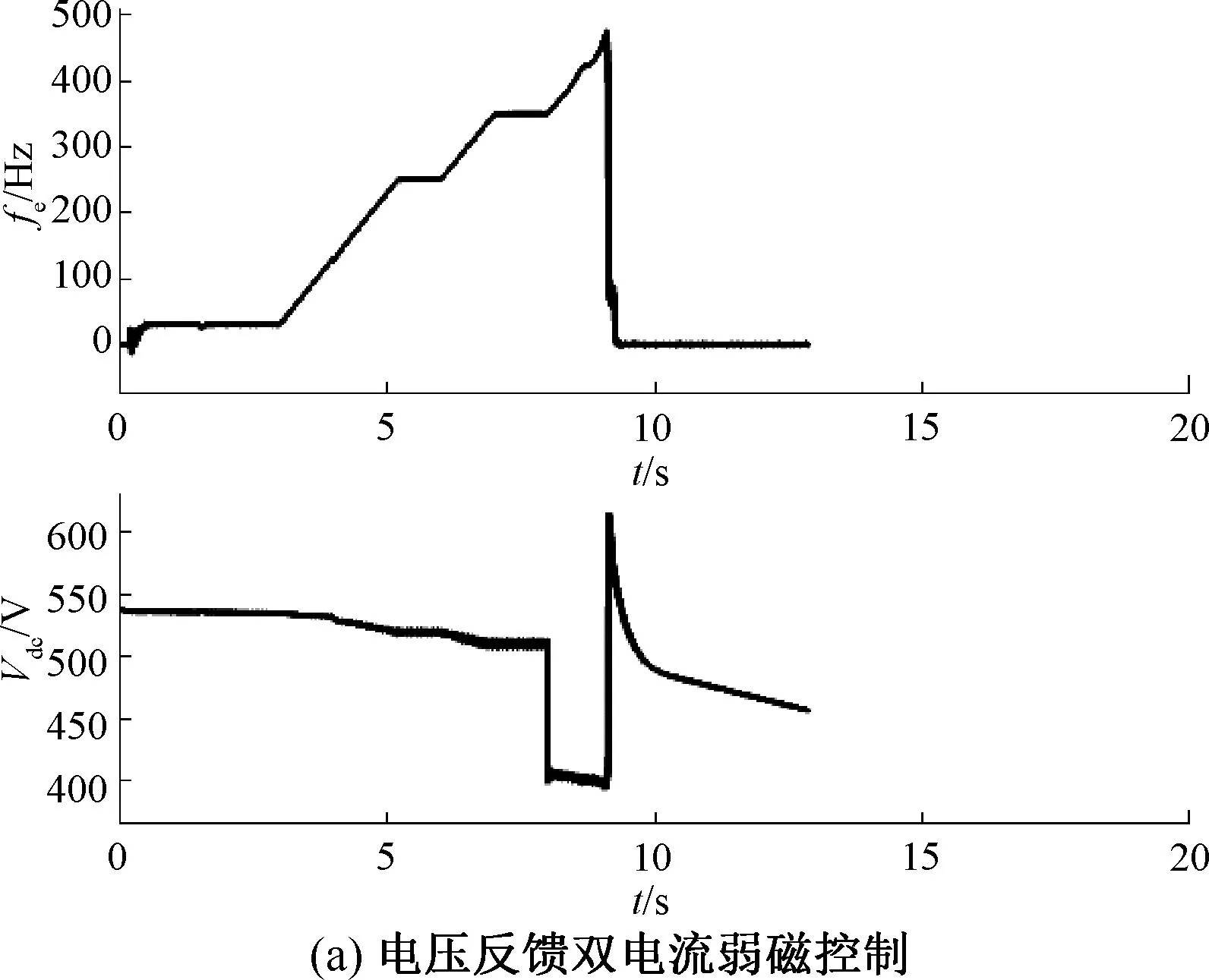
圖9 電網電壓跌落時兩種弱磁控制對比
4 實驗結果
采用本文圖4的新型弱磁控制方法,在如圖10所示的電機對拖加載平臺上對200 kW永磁同步電機進行了對拖加載驅動實驗。電機采用的內嵌式2對極永磁同步電機,額定功率200 kW,額定轉速12 000 r/min,變頻器的主控選用了TI的28335控制芯片,載波頻率為5 kHz,電流環控制周期為5 kHz。
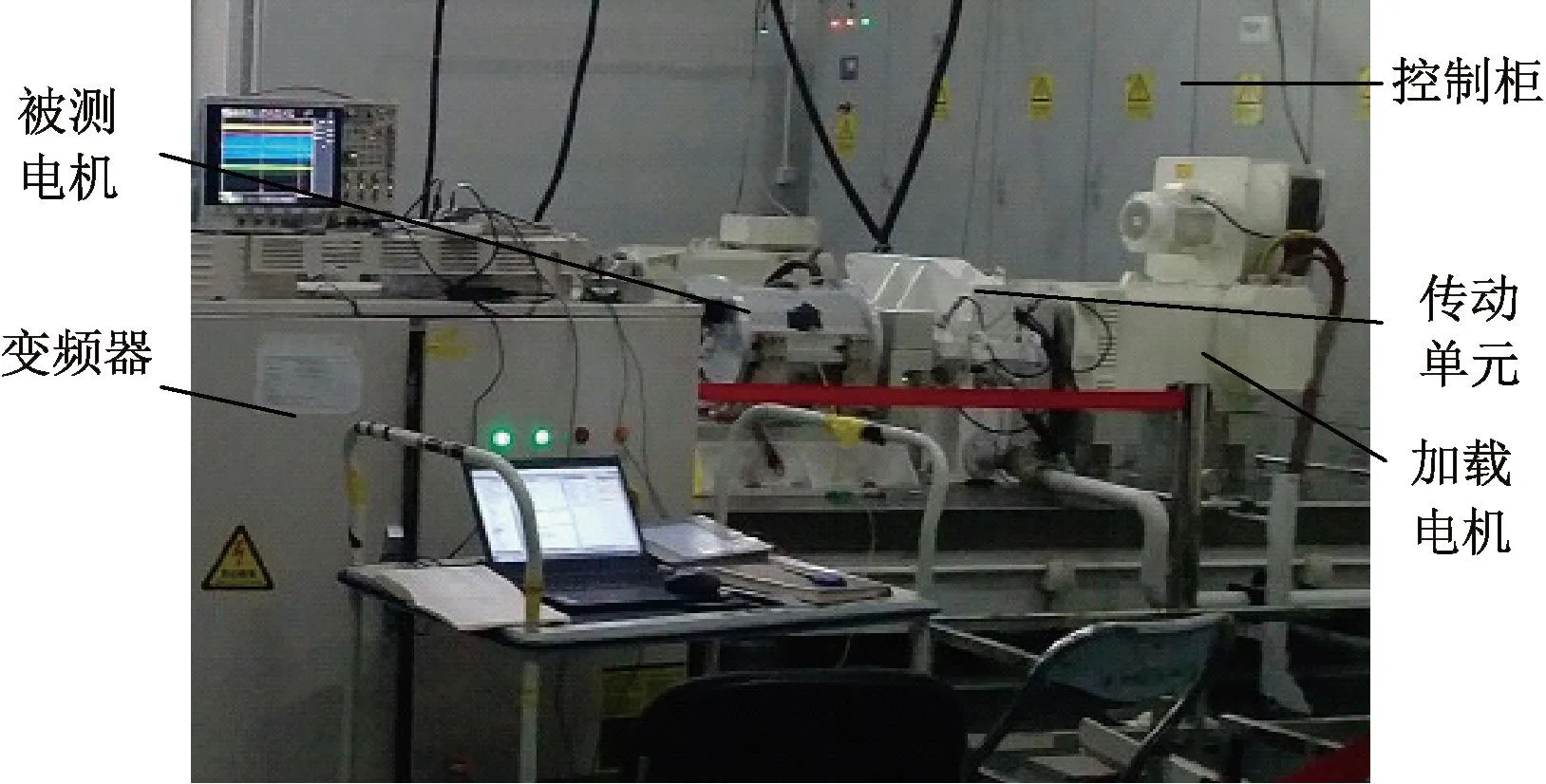
圖10 電機對拖加載實驗平臺
在本文的新型弱磁控制方法下,電機能實現全頻滿載運行,電機在額定轉速下滿載運行的相電流波形如圖11所示。可見,在新型弱磁控制下,電機能穩定弱磁運行。
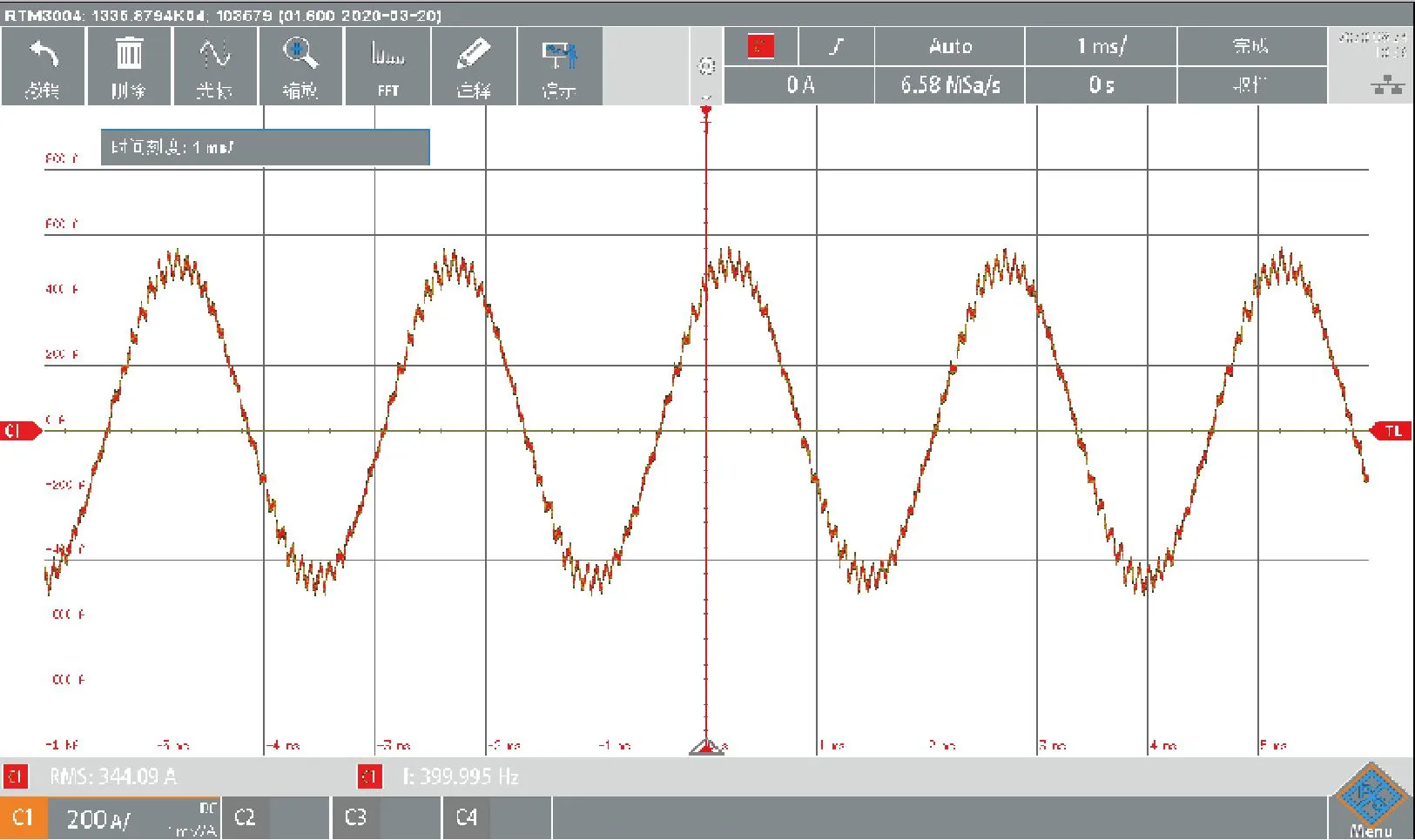
圖11 新型弱磁控制下電機滿載運行相電流波形
此外,為了進一步驗證新型弱磁控制策略的動態響應能力,進行了電壓突降實驗,并與目前行業普遍采用的電壓反饋雙電流弱磁控制進行了對比,實驗結果如圖12所示。
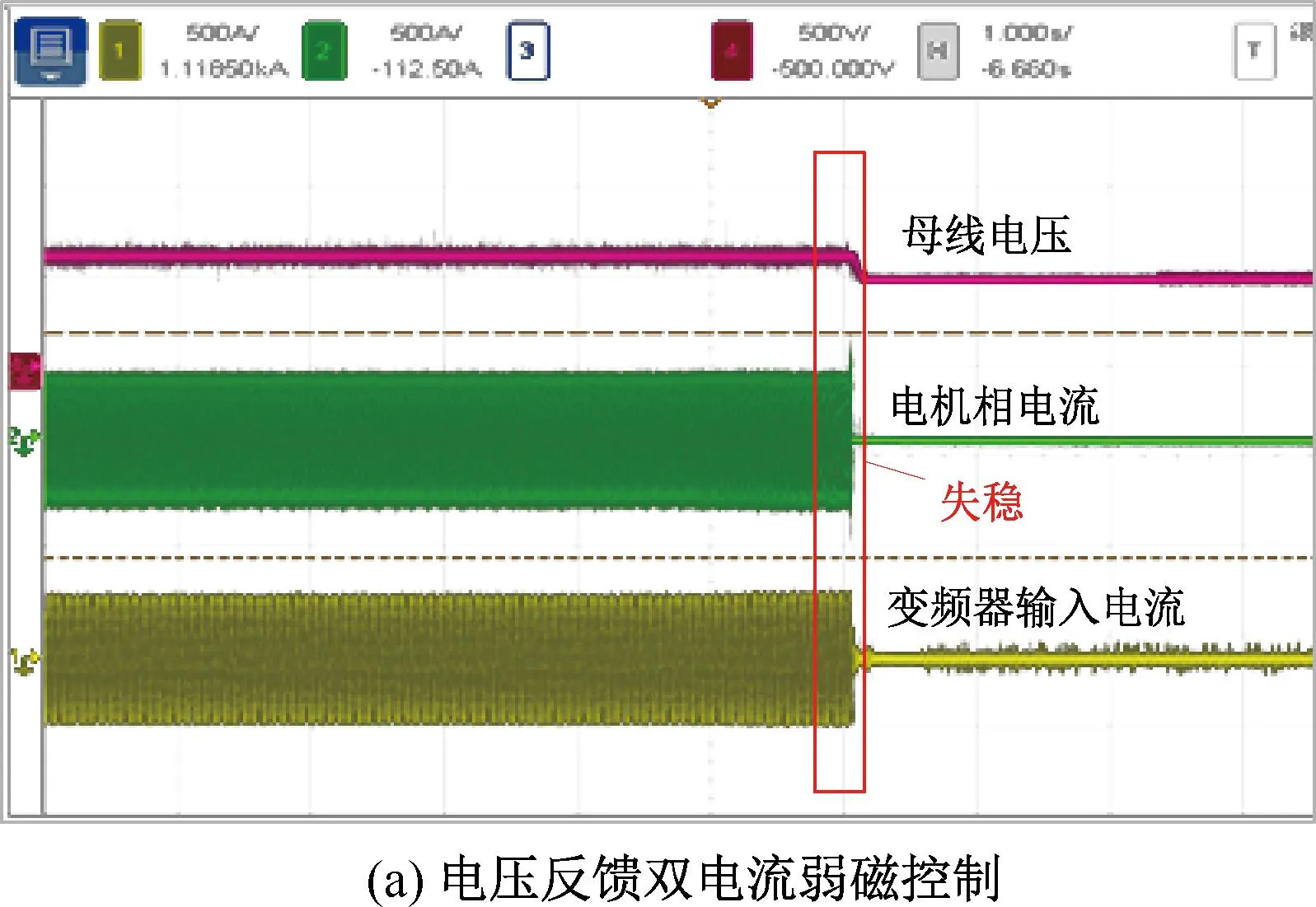
圖12 電壓跌落時的電機運行波形
從實驗結果可看出,電壓突然跌落時,在常規的電壓反饋雙電流弱磁控制下電機失穩,而在新型弱磁控制下,電機能穩定弱磁運行,可見本文的弱磁控制方法動態響應更佳。
5 結 語
本文以壓縮機用HS-PMSM為研究對象,結合壓縮機電機的負載特性,提出了一種基于電壓限幅的新型單電流弱磁控制策略。通過對q軸電壓進行動態限幅,能在一個控制拓撲下實現中低速弱磁時雙電流調節模式及高速弱磁時單電流調節模式的自然過渡。該新型單電流弱磁控制策略,相比現有的單電流弱磁策略,無需單獨研究模式切換策略,控制拓撲更簡化,相比電壓反饋雙電流弱磁控制方法,能較好地解決高速電流耦合問題,且動態響應能力更好。
為驗證本文方法的有效性,分別進行了仿真及實驗驗證,仿真及實驗結果表明:本文的新型弱磁方法在一個控制拓撲下實現了電機的全頻滿載穩定弱磁運行,且在電壓跌落突變過程中,相比常用的電壓反饋雙電流調節弱磁控制方法,動態性能更好。
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
兒童故事畫報(2019年5期)2019-05-26 14:26:14
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
