基于船舶操縱模擬器的大型滾裝船泊穩(wěn)條件試驗(yàn)方法
2023-12-29 13:22:36陳立家王冰魏天明許毅
上海海事大學(xué)學(xué)報(bào) 2023年4期
陳立家, 王冰, 魏天明, 許毅
(1.武漢理工大學(xué)航運(yùn)學(xué)院,湖北 武漢 430063;2.武漢理工大學(xué)內(nèi)河航運(yùn)技術(shù)湖北省重點(diǎn)實(shí)驗(yàn)室,湖北 武漢 430063;3.武漢理工大學(xué)計(jì)算機(jī)與人工智能學(xué)院,湖北 武漢 430063)
0 引 言
系泊船舶的穩(wěn)定是保證船舶安全系泊作業(yè)、提高裝卸效率的基本前提。隨著工業(yè)生產(chǎn)的迅速發(fā)展,能源和化工等行業(yè)大型工程不斷地新建與擴(kuò)建,其對(duì)大型化設(shè)備與物資的需求也越來越大。大件設(shè)備和大件模塊往往需要通過水路運(yùn)輸,因此大型滾裝船應(yīng)運(yùn)而生。由于碼頭前沿水域高程條件和水深條件的限制,以及大型滾裝船自身質(zhì)量大、重心高、慣性大,受風(fēng)、流的影響大,運(yùn)動(dòng)狀態(tài)難以控制等特點(diǎn),大型滾裝船停靠通常采用丁靠系泊方式。丁靠系泊,即船舶與滾裝碼頭的前沿線垂直,呈“丁”字形,并由若干系泊纜繩將其與岸上系船墩連接在一起。該系泊方式可借鑒的經(jīng)驗(yàn)較少,對(duì)環(huán)境要求較嚴(yán)格。因此,需要對(duì)大型滾裝船的系泊安全進(jìn)行分析,確定安全作業(yè)的極限環(huán)境條件。
從研究方法上來看,國(guó)內(nèi)外學(xué)者對(duì)船舶系泊問題和環(huán)境載荷的分析主要采用理論計(jì)算、船舶物理模型試驗(yàn)、實(shí)船試驗(yàn)和OPTIMOOR軟件分析等方法。劉明維等[1]建立了船閘浮式系船柱受荷響應(yīng)力學(xué)模型,反映船舶纜繩系纜力與浮式系船柱柱身應(yīng)變的關(guān)系。QI等[2]對(duì)碼頭系泊的液化天然氣(liquefied natural gas,LNG)船的水動(dòng)力性能進(jìn)行了系泊模型試驗(yàn)研究,在試驗(yàn)過程中考慮了風(fēng)、浪、流等環(huán)境因素對(duì)碼頭系泊系統(tǒng)的影響,并分別測(cè)定了不同海況下系泊系統(tǒng)的六個(gè)自由度運(yùn)動(dòng)響應(yīng)和纜繩張力。董勝等[3]通過物理模型試驗(yàn)對(duì)青島萬達(dá)游艇碼頭項(xiàng)目進(jìn)行了研究,測(cè)定了擬建碼頭附近水域的船舶泊穩(wěn)條件。NGUYEN等[4]采用物理模型試驗(yàn)的方法,研究靠近港口的過往船舶所產(chǎn)生的波浪對(duì)系泊船舶運(yùn)動(dòng)和系泊纜繩張力的影響,測(cè)定了系泊船舶在不同海況下不規(guī)則波浪中的運(yùn)動(dòng)量和受力。周斌等[5]以中小型LNG船為目標(biāo)船型,利用OPTIMOOR軟件計(jì)算船舶運(yùn)動(dòng)和系泊纜繩受力。LEE等[6]使用OPTIMOOR軟件,對(duì)船舶的敏感性進(jìn)行分析,識(shí)別船對(duì)船過駁系泊中的影響因素,并基于試驗(yàn)結(jié)果建立了船對(duì)船系泊的安全標(biāo)準(zhǔn)。
雖然對(duì)船舶系泊分析的研究已有較多研究成果,但對(duì)大型滾裝船丁靠系泊模擬的研究較少,且在研究過程中對(duì)環(huán)境因素有的進(jìn)行了大量簡(jiǎn)化,有的采用定常設(shè)定的方式,未能反映出真實(shí)的動(dòng)態(tài)環(huán)境場(chǎng)。為此,本研究提出一種基于船舶操縱模擬器的大型滾裝船泊穩(wěn)條件試驗(yàn)方法。采用理論推導(dǎo)與數(shù)值仿真相結(jié)合的方法,對(duì)系泊船舶的受力狀態(tài)進(jìn)行分析,以分離式船舶運(yùn)動(dòng)數(shù)學(xué)模型MMG(mathematical model group)為基礎(chǔ),構(gòu)建系泊大型滾裝船運(yùn)動(dòng)數(shù)學(xué)模型,并將其運(yùn)用于船舶操縱模擬器中,基于實(shí)時(shí)模擬的動(dòng)態(tài)環(huán)境場(chǎng)計(jì)算系泊船體運(yùn)動(dòng)量、系泊纜力和護(hù)舷反作用力;采用時(shí)域耦合方法,分析在不同環(huán)境載荷作用下的泊穩(wěn)狀況。以湛江港某4萬t滾裝船系泊為例,驗(yàn)證模型的正確性以及該模型用于開展船舶泊穩(wěn)條件試驗(yàn)的可行性,并最終確定該船安全系泊的極限環(huán)境條件。
1 船舶系泊運(yùn)動(dòng)建模
為更好地描述大型滾裝船系泊運(yùn)動(dòng),以船體本身為參照,建立以船舶重心為坐標(biāo)原點(diǎn)的附體坐標(biāo)系,如圖1所示:xoy與水平面重合;x軸與船舶首尾線重合,正方向指向船首;y軸與正橫方向平行,正方向指向右舷;z軸垂直于xoy平面,正方向向上。

(a)俯視圖
1.1 風(fēng)載荷計(jì)算
大型滾裝船在以丁靠方式系泊時(shí),船舶處于無速、無舵效狀態(tài),且其受風(fēng)面積比同噸位的一般貨船的大,故風(fēng)力對(duì)船舶運(yùn)動(dòng)的影響尤為顯著。風(fēng)速通常由平均風(fēng)速vm和時(shí)變風(fēng)速vt組成,其表達(dá)式為
vwind=vm+vt
(1)
時(shí)變風(fēng)載荷的動(dòng)力效應(yīng)通過風(fēng)譜體現(xiàn)。基于Davenport風(fēng)譜,利用諧波疊加的方法,通過確定風(fēng)速的時(shí)域歷程來模擬時(shí)變風(fēng),然后加入平均風(fēng)來模擬隨機(jī)風(fēng)。作用在船舶上的風(fēng)載荷可以用Hughes公式進(jìn)行計(jì)算,以縱蕩方向的風(fēng)載荷為例:
(2)
式中:ρ為空氣密度;Cx,wind,α為縱蕩方向的風(fēng)力系數(shù),下標(biāo)α為風(fēng)舷角;Af為水線上船體正面投影面積。
當(dāng)船舶處于系泊運(yùn)動(dòng)狀態(tài)時(shí),風(fēng)載荷力矩(以艏搖力矩為例)可表示為
(3)
式中:Cwind,α為艏搖方向的風(fēng)力系數(shù);As為水線上船體側(cè)面投影面積;L為船舶總長(zhǎng)。
1.2 水流載荷計(jì)算
水流的流速隨時(shí)間的變化是相對(duì)緩慢的,在對(duì)大型滾裝船水下部分所承受的水流載荷進(jìn)行計(jì)算時(shí),考慮恒定、均勻水流的干擾,縱蕩方向的水流載荷的計(jì)算如下:
(4)
式中:ρsea為海水密度;Cx,current為縱蕩方向的水流壓力系數(shù);vcurrent為水流流速;d為船舶吃水。
水流作用在船體水下部分幾何中心處的艏搖力矩:
(5)
式中:g為重力加速度;Ccurrent為艏搖力矩系數(shù);Lw為船舶水線長(zhǎng)。
1.3 波浪載荷計(jì)算
在對(duì)系泊船舶進(jìn)行波浪載荷計(jì)算時(shí),考慮船體受到的波浪力隨時(shí)間的正弦變化,而波浪力大小與船舶與波浪間的相對(duì)位置有關(guān),因此將波浪力計(jì)算式寫為
(6)
式中:Fm,wave為波浪力幅值,其引起船舶各自由度運(yùn)動(dòng)的具體計(jì)算方法參照文獻(xiàn)[7];ξ′為波浪力坐標(biāo)系中船舶的位置;λ為波長(zhǎng)。
1.4 系泊纜力計(jì)算
系泊纜力的計(jì)算目前多使用文獻(xiàn)[8]的計(jì)算模型。該模型給出了船舶在風(fēng)、流作用下的計(jì)算式,但未給出船舶受到的波浪載荷的計(jì)算式。因此,在上述風(fēng)、流模型的基礎(chǔ)上,將波浪載荷加入計(jì)算模型中,得到船舶系泊纜力FL的計(jì)算式:
(7)
系泊系統(tǒng)一般都有多根系泊纜繩。由于各纜繩的受力情況類似,故纜繩對(duì)船舶的總系泊纜力可以用各纜繩系泊纜力之和表示。將系泊纜力在船舶坐標(biāo)系中進(jìn)行矢量分解(如圖2中纜繩拉力示意圖所示,A點(diǎn)為船上導(dǎo)纜孔,B點(diǎn)為岸上系纜墩),得到系泊纜力各方向分力的計(jì)算模型,船舶縱蕩方向上的系泊纜力計(jì)算式為
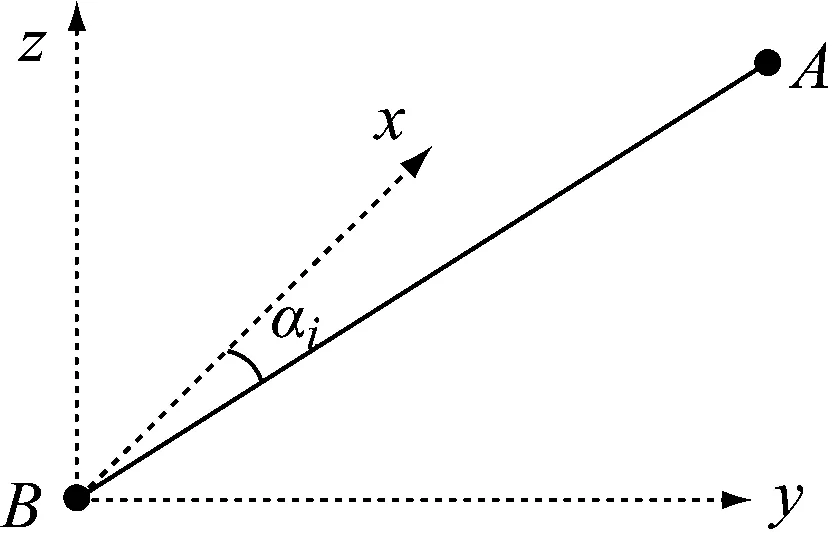
圖2 纜繩拉力示意圖
(8)
式中:n為纜繩數(shù)量;i為纜繩序號(hào);αi為導(dǎo)纜孔與系纜墩連線的水平夾角;θ為船首向。
纜繩作用在船舶上的力矩(以艏搖力矩為例)可表示為
ML=
(9)
式中:xi、yi為纜繩i的導(dǎo)纜孔的x、y軸坐標(biāo)值。
1.5 護(hù)舷反作用力計(jì)算
當(dāng)船舶與護(hù)舷發(fā)生接觸時(shí),采用赫茲接觸定律[9]計(jì)算接觸力:
(10)
式中:Rs為船舶接觸點(diǎn)處的曲率半徑;Rb為護(hù)舷接觸點(diǎn)處的曲率半徑;νs為船體材料的泊松比;νb為護(hù)舷材料的泊松比;Es為船體材料的楊氏模量;Eb為護(hù)舷材料的楊氏模量;δ為接觸時(shí)的形變量。
以縱蕩方向?yàn)槔?護(hù)舷對(duì)船舶產(chǎn)生的力可表示為
Fx,F=fsin(φ-φ)
(11)
以艏搖力矩為例,作用在船舶上的力矩可表示為
MF=fxccos(φ-φ)-fycsin(φ-φ)
(12)
式中:φ為船首與正北方向夾角;φ為碼頭方向;xc、yc為碰撞點(diǎn)的x、y軸坐標(biāo)值,其可以采用點(diǎn)面碰撞來求解。
1.6 船舶系泊系統(tǒng)數(shù)學(xué)模型
基于MMG分離建模的思想[10],針對(duì)裸船體、螺旋槳、舵的結(jié)構(gòu)構(gòu)建船舶運(yùn)動(dòng)的基本數(shù)學(xué)模型。為實(shí)現(xiàn)系泊船舶運(yùn)動(dòng)數(shù)值預(yù)報(bào),根據(jù)系泊作業(yè)要求,將系泊纜力、護(hù)舷反作用力和力矩施加到船舶六自由度運(yùn)動(dòng)模型中,得到系泊纜繩-船舶-護(hù)舷耦合模型:
式中:m為船舶質(zhì)量;vx、vy、vz分別為船舶在x、y、z軸方向上的速度分量,即船舶的縱蕩速度、橫蕩速度、垂蕩速度;ωx、ωy、ωz分別為船舶繞x、y、z軸的角速度大小,即船舶的橫搖角速度、縱搖角速度、艏搖角速度;Fx、Fy、Fy分別為船舶在x、y、z軸方向上所受合外力大小;下標(biāo)H、P、R、L、F、wind、wave、current分別表示水、槳、舵、纜繩、護(hù)舷、風(fēng)、浪和流;Ixx、Iyy、Izz分別為繞x、y、z軸的船舶慣性張量大小;Mx、My、Mz分別為船舶在x、y、z軸方向上所受合外力矩大小。
因?yàn)橄挡醋鳂I(yè)時(shí)槳和舵往往處于停止?fàn)顟B(tài),所以將模型中的槳力和舵力置零。船體水動(dòng)力采用基本的橫流模型來確定。
計(jì)算系泊系統(tǒng)運(yùn)動(dòng)的步驟如下:第一步,根據(jù)MMG模型計(jì)算船舶在自由狀態(tài)時(shí)的運(yùn)動(dòng)模型,確定船位和導(dǎo)纜孔位置;第二步,將船位和速度傳給護(hù)舷作用力模型,以便確定護(hù)舷反作用力,同時(shí)計(jì)算風(fēng)、浪、流等環(huán)境載荷,并將其傳給系泊纜力模型,根據(jù)模型計(jì)算纜繩系泊纜力;第三步,將計(jì)算得到的纜繩受力、護(hù)舷反作用力傳遞給系泊系統(tǒng),用于求解船舶位置和速度等參數(shù);第四步,重復(fù)第二步和第三步,直到船舶運(yùn)動(dòng)量不在許可范圍內(nèi),結(jié)束計(jì)算。在各次循環(huán)中,須檢驗(yàn)纜繩的張力是否超過其破斷載荷。
2 仿真試驗(yàn)平臺(tái)和流程設(shè)計(jì)
2.1 仿真試驗(yàn)平臺(tái)
利用船舶操縱模擬器對(duì)大型滾裝船的系泊作業(yè)進(jìn)行數(shù)值模擬,其優(yōu)勢(shì)在于能夠?qū)崿F(xiàn)模型解算和人機(jī)交互。將構(gòu)建的船舶系泊運(yùn)動(dòng)數(shù)學(xué)模型以動(dòng)態(tài)庫(kù)方式鏈接到船舶操縱模擬器仿真平臺(tái),通過輸入船型參數(shù)和系泊參數(shù)等數(shù)據(jù),即可計(jì)算在設(shè)定條件下的船體運(yùn)動(dòng)量、纜繩張力、護(hù)舷反作用力。這些信息在解算完成后被輸入場(chǎng)景仿真模塊中,駕駛控制臺(tái)和視景顯示系統(tǒng)顯示出整體視景畫面,操作員在三維虛擬環(huán)境中操作相關(guān)設(shè)備,體驗(yàn)接近實(shí)際的系泊操作。同時(shí),信息輸入到信息存儲(chǔ)單元[11],通過提取實(shí)時(shí)的仿真數(shù)據(jù),可以對(duì)船舶系泊安全進(jìn)行全面分析。圖3為使用船舶操縱模擬器進(jìn)行系泊試驗(yàn)的場(chǎng)景。

圖3 船舶操縱模擬器系泊試驗(yàn)場(chǎng)景
2.2 試驗(yàn)流程設(shè)計(jì)
基于船舶操縱模擬器的大型滾裝船泊穩(wěn)條件試驗(yàn)一般包括以下幾個(gè)步驟,具體流程見圖4。

圖4 大型滾裝船泊穩(wěn)試驗(yàn)流程
運(yùn)用面向?qū)ο蟮腣isual C#編程語言為大型滾裝船系泊運(yùn)動(dòng)數(shù)學(xué)模型編程,并將程序?qū)氪安倏v模擬器中,對(duì)船舶操縱模擬器進(jìn)行功能拓展,用于泊穩(wěn)仿真試驗(yàn):首先,對(duì)仿真環(huán)境進(jìn)行建模,建立電子海圖、三維視景模型、船舶模型,并逐一驗(yàn)證,確保在仿真環(huán)境下的模擬環(huán)境與實(shí)際水域環(huán)境一致,以及模擬船模與真實(shí)系泊船舶的尺度和操縱特性的相似性[12];其次,根據(jù)試驗(yàn)要求確定模擬試驗(yàn)方案,將船舶以丁靠方式置于碼頭前,根據(jù)確定的纜繩布置方案系帶纜繩,并調(diào)整各纜繩初始系泊纜力;最后,采用人機(jī)交互試驗(yàn)的方法,運(yùn)用船舶操縱模擬器進(jìn)行實(shí)時(shí)船舶系泊操縱模擬試驗(yàn)。使用模擬器實(shí)時(shí)監(jiān)控并記錄風(fēng)浪流環(huán)境、船舶運(yùn)動(dòng)信息和系泊纜力數(shù)據(jù),選取相應(yīng)的泊穩(wěn)指標(biāo),結(jié)合相關(guān)規(guī)范,調(diào)整不同環(huán)境參數(shù),直至獲得大型滾裝船的泊穩(wěn)條件。
3 大型滾裝船系泊仿真模型
3.1 試驗(yàn)船型參數(shù)
以湛江港某重大件滾裝船碼頭項(xiàng)目為依托進(jìn)行仿真試驗(yàn),選用滿載的4萬t滾裝船為研究對(duì)象。試驗(yàn)船型參數(shù)見表1,其尺度和操縱性能等與真實(shí)船的一致。
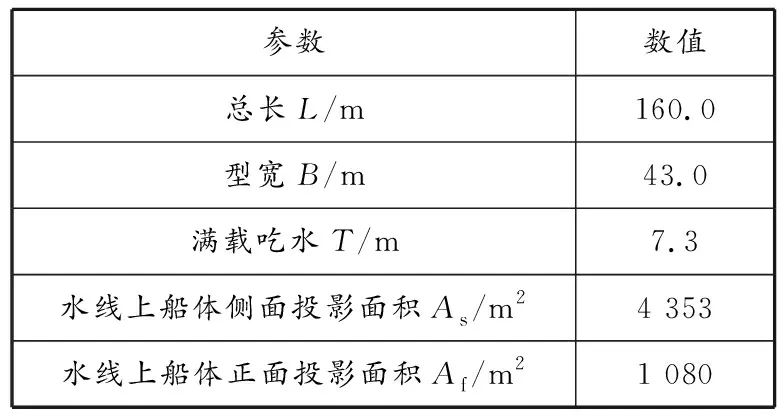
表1 試驗(yàn)船型主要參數(shù)
3.2 系泊系統(tǒng)布置
不同噸級(jí)的船舶使用的系泊纜繩數(shù)量不同,根據(jù)布置原則確定該4萬t滾裝船的系泊纜繩數(shù)量共8根。8根纜繩采用全倒纜的系纜方案,關(guān)于船舯呈對(duì)稱分布,分別為2根艉纜、2根艉倒纜、2根艏纜和2根艏倒纜。系泊纜繩布置方式見圖5。系泊纜繩均為截面尺寸為36 mm×20 mm的超高分子量的聚乙烯繩,8根繩的彈性、長(zhǎng)度和質(zhì)量相似;每根繩的最小破斷力為790 kN,安全系數(shù)為2,即其允許的最大工作載荷取395 kN。碼頭上布置4組DA-A600H標(biāo)準(zhǔn)反力型橡膠護(hù)舷,每組最大壓縮變形為55%,反力標(biāo)準(zhǔn)值為412 kN,4組護(hù)舷反力合計(jì)1 648 kN。
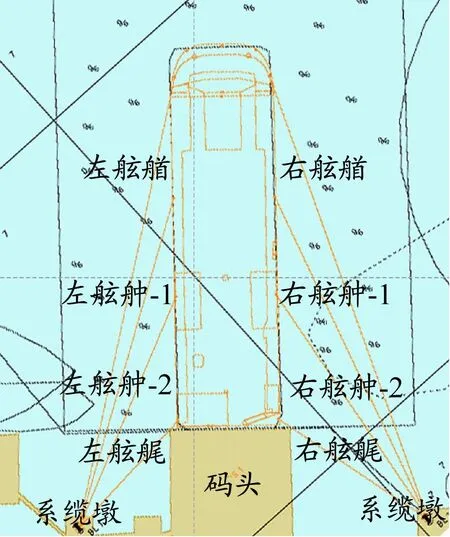
圖5 系纜方案布置方式
3.3 動(dòng)態(tài)環(huán)境參數(shù)
基于該滾裝碼頭區(qū)域的水文、氣象觀測(cè)數(shù)據(jù),假定在1 s內(nèi)風(fēng)的特征要素不發(fā)生變化,根據(jù)第1.1節(jié)的理論,循環(huán)計(jì)算出每秒的風(fēng)場(chǎng)數(shù)據(jù),完成3 h隨機(jī)風(fēng)的實(shí)時(shí)模擬。采用碼頭水域年測(cè)的平均波浪高度0.4 m和0.5 m,波浪和風(fēng)的方向設(shè)置為同一個(gè)方向,實(shí)現(xiàn)對(duì)規(guī)則波的實(shí)時(shí)模擬。流場(chǎng)為均勻同向的定常流場(chǎng),流向分別為310°(漲潮流)和130°(落潮流),流速均為0.3 m/s。
船舶停靠時(shí)所受到的風(fēng)、浪、流的方向的定義見圖6。定義環(huán)境載荷的入射方向與x軸正向的夾角為環(huán)境載荷的入射角,其中:當(dāng)風(fēng)、浪入射角為310°時(shí),船舶為迎風(fēng)、浪狀態(tài);當(dāng)流向?yàn)?30°時(shí)船首迎流,當(dāng)流向?yàn)?10°時(shí)船尾迎流。

圖6 環(huán)境載荷方向
為分析大型滾裝船在風(fēng)、浪、流共同影響下的泊穩(wěn)特性,在考慮船舶左、右舷橫向受力的基礎(chǔ)上,根據(jù)風(fēng)、流、波浪參數(shù)出現(xiàn)頻率的大小,對(duì)泊穩(wěn)的環(huán)境條件進(jìn)行有效的預(yù)設(shè),確定2組不同的環(huán)境參數(shù),具體見表2。

表2 邊界條件預(yù)設(shè)
4 大型滾裝船泊穩(wěn)分析
4.1 泊穩(wěn)衡準(zhǔn)指標(biāo)
目前國(guó)內(nèi)外對(duì)船舶泊穩(wěn)標(biāo)準(zhǔn)尚無統(tǒng)一規(guī)定。考慮到大型滾裝船系泊的特點(diǎn),選取船體運(yùn)動(dòng)量、系泊纜力、護(hù)舷反作用力這3個(gè)主要控制指標(biāo)進(jìn)行系泊安全評(píng)判。
系泊滾裝船在風(fēng)、浪、流等環(huán)境條件滿足安全作業(yè)要求的情況下,通過船上跳板與碼頭相連,進(jìn)行水平裝卸作業(yè)。大型滾裝船載貨體積和載貨質(zhì)量比普通貨船的大,在不同裝載狀態(tài)下船舶穩(wěn)性變化大。為使船舶保持一定的平衡狀態(tài),確保跳板、活動(dòng)車輛等特殊設(shè)備的正常使用,便于貨物裝卸,船舶不能產(chǎn)生大幅度的垂蕩運(yùn)動(dòng)。文獻(xiàn)[13-15]均對(duì)船舶運(yùn)動(dòng)量作出限制要求。對(duì)于滾裝船采用船尾靠泊作業(yè)時(shí)的運(yùn)動(dòng)量,文獻(xiàn)[15]給出了更嚴(yán)格的限制標(biāo)準(zhǔn),規(guī)定了作業(yè)期間船舶六自由度運(yùn)動(dòng)量的允許值。若六個(gè)自由度的運(yùn)動(dòng)量未超出允許值,則認(rèn)為系泊是安全穩(wěn)定的,在運(yùn)動(dòng)量足夠小的情況下船舶的穩(wěn)性可以得到很好的保證。
系泊纜繩是線彈性的,在系泊作業(yè)過程中長(zhǎng)期處于拉伸狀態(tài),伴隨有逐漸明顯的彈性變形效應(yīng),其張力急劇增大。當(dāng)纜繩最大張力大于其破斷載荷時(shí),系泊作業(yè)的安全穩(wěn)定性遭到破壞。因此,本研究在大型滾裝船運(yùn)動(dòng)的基礎(chǔ)上疊加系泊纜繩的彈性變形,考慮發(fā)生彈性變形時(shí)系泊纜繩的張力變化。國(guó)內(nèi)規(guī)范對(duì)纜繩載荷的限制標(biāo)準(zhǔn)沒有給出準(zhǔn)確規(guī)定,參考文獻(xiàn)[16]對(duì)船用系纜允許負(fù)荷的規(guī)定:鋼絲繩不超過其破斷強(qiáng)度的55%,尼龍繩以外的化纖繩不超過其破斷強(qiáng)度的50%,尼龍繩不超過其破斷強(qiáng)度的45%。高強(qiáng)度纖維繩可參照一般化纖繩,允許負(fù)荷取破斷強(qiáng)度的50%。以纜繩受力是否超出安全負(fù)荷對(duì)纜繩進(jìn)行破斷分析。在碼頭前沿設(shè)置的護(hù)舷設(shè)備對(duì)船舶泊穩(wěn)性有著至關(guān)重要的作用,其主要由護(hù)舷壓縮量決定,多依據(jù)文獻(xiàn)[13]和[17]計(jì)算。與載荷規(guī)范相比,文獻(xiàn)[13]不僅考慮了船舶正常靠泊,而且考慮了船舶異常靠泊行為,考慮的因素更為精細(xì)、全面和合理。因此,參照文獻(xiàn)[13]對(duì)護(hù)舷壓縮量的規(guī)定,最大反作用力引起的形變不得超過52.5%的壓縮形變量。當(dāng)護(hù)舷反作用力超過其設(shè)計(jì)反力時(shí),則認(rèn)為護(hù)舷強(qiáng)度不滿足要求。
4.2 船體運(yùn)動(dòng)量分析
通過求解系泊船舶六自由度運(yùn)動(dòng)模型,得到不同風(fēng)、浪、流條件下系泊滾裝船運(yùn)動(dòng)量的變化數(shù)據(jù),對(duì)其最大值進(jìn)行統(tǒng)計(jì)并與規(guī)范值進(jìn)行比較(見表3)。

表3 船舶六自由度運(yùn)動(dòng)量最大值對(duì)比
圖7和圖8給出了在以上兩組設(shè)定環(huán)境條件下,系泊船舶在6個(gè)自由度(縱蕩、橫蕩、垂蕩、橫搖、縱搖、艏搖)上的運(yùn)動(dòng)變化曲線,其中“+”表示各自由度的正方向,“-”表示各自由度的反方向。
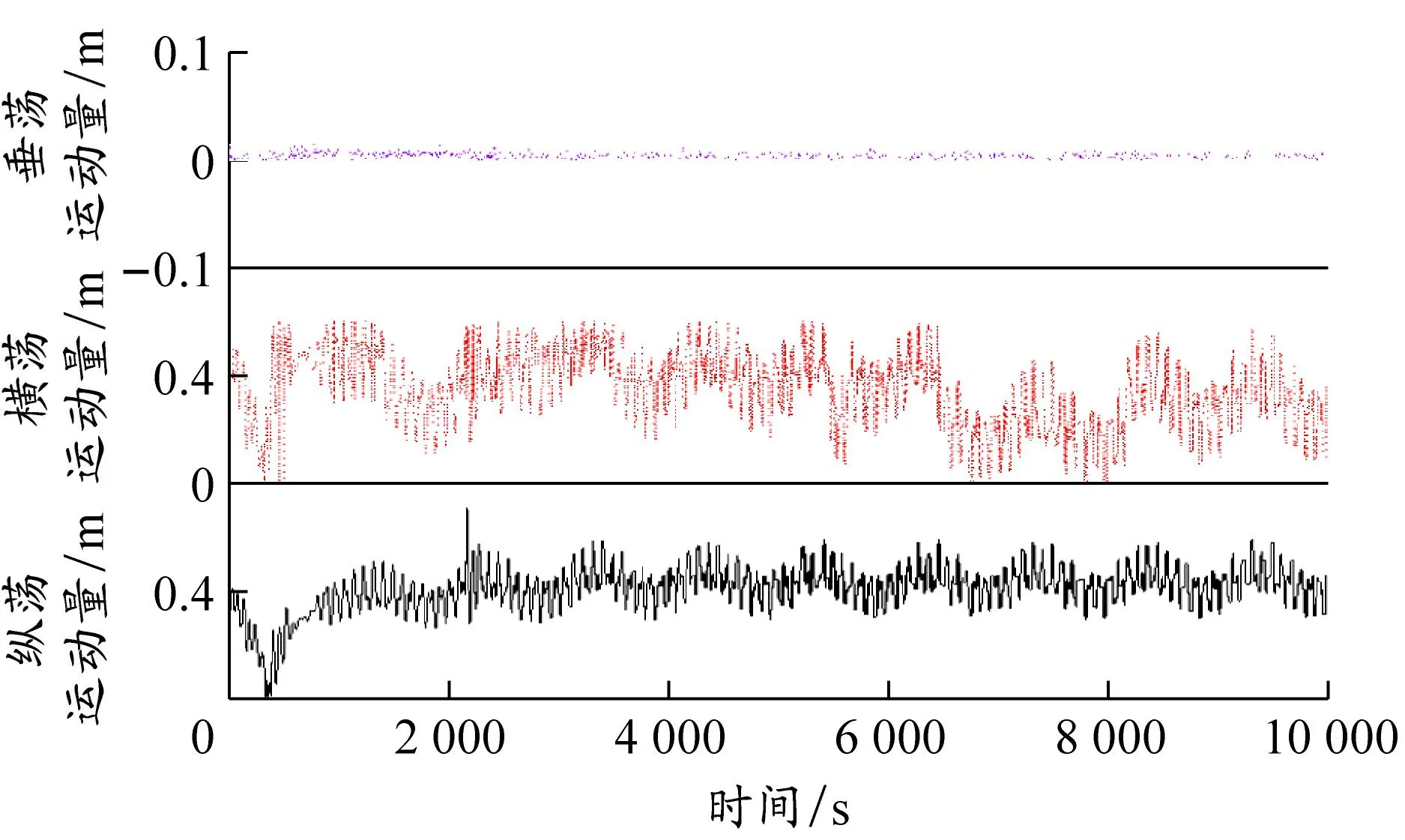
(a)沿x、y、z軸的往復(fù)平動(dòng)

(a)沿x、y、z軸的往復(fù)平動(dòng)
對(duì)比不同工況下船體運(yùn)動(dòng)量的時(shí)間歷程曲線可知,在風(fēng)、浪、流等的沖擊下系泊船舶船體的運(yùn)動(dòng)極其不規(guī)則,由于纜繩的約束,船舶在6個(gè)自由度上的運(yùn)動(dòng)在不同環(huán)境下呈現(xiàn)出不同的特性。由于不同風(fēng)速、風(fēng)向、流速和浪高的隨機(jī)作用,系泊船舶產(chǎn)生劇烈的縱蕩運(yùn)動(dòng),初始時(shí)先產(chǎn)生向后的位移,隨后受纜繩的影響運(yùn)動(dòng)幅值逐漸減小,并進(jìn)行隨機(jī)的往復(fù)縱蕩運(yùn)動(dòng);橫蕩運(yùn)動(dòng)幅度在前1 000 s內(nèi)逐漸減小并開始隨風(fēng)、浪、流隨機(jī)變化。與縱蕩和橫蕩運(yùn)動(dòng)幅值變化較大相比,垂蕩時(shí)歷曲線一直在零水平附近振蕩。系泊船舶除產(chǎn)生平動(dòng)外,還發(fā)生轉(zhuǎn)動(dòng)。在載荷突然作用時(shí),艏搖角在前1 000 s內(nèi)運(yùn)動(dòng)幅值逐漸減小,隨后隨風(fēng)、浪、流隨機(jī)變化。橫搖和縱搖時(shí)歷曲線長(zhǎng)期穩(wěn)定在零水平附近波動(dòng)。
4.3 系泊纜力分析
通過求解系泊模型,可得到系泊纜力在不同風(fēng)、浪、流環(huán)境條件下隨時(shí)間的變化情況,分別繪制船舶各纜繩持續(xù)受力變化曲線,見圖9~12。
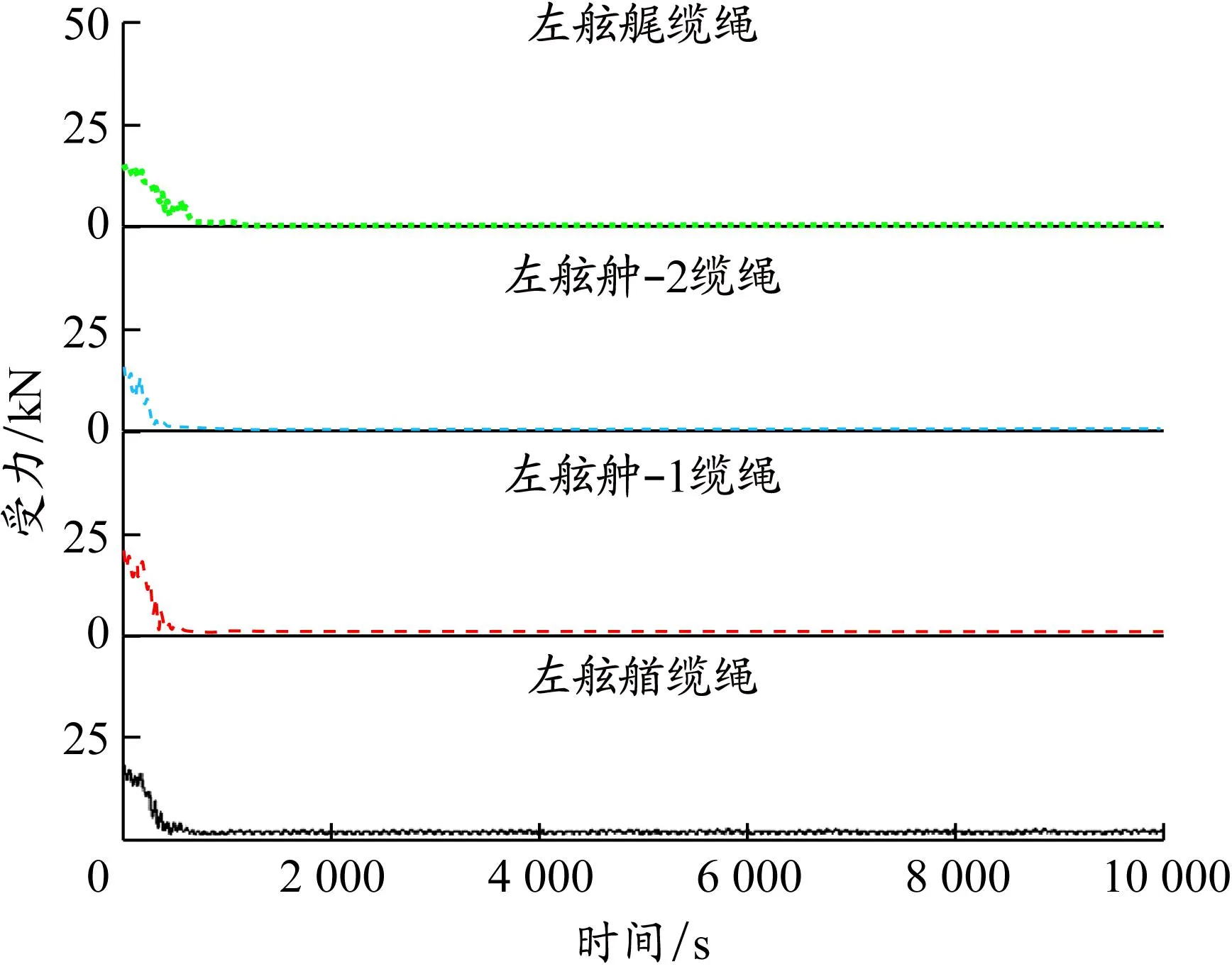
圖9 左舷各纜繩受力變化(條件1)
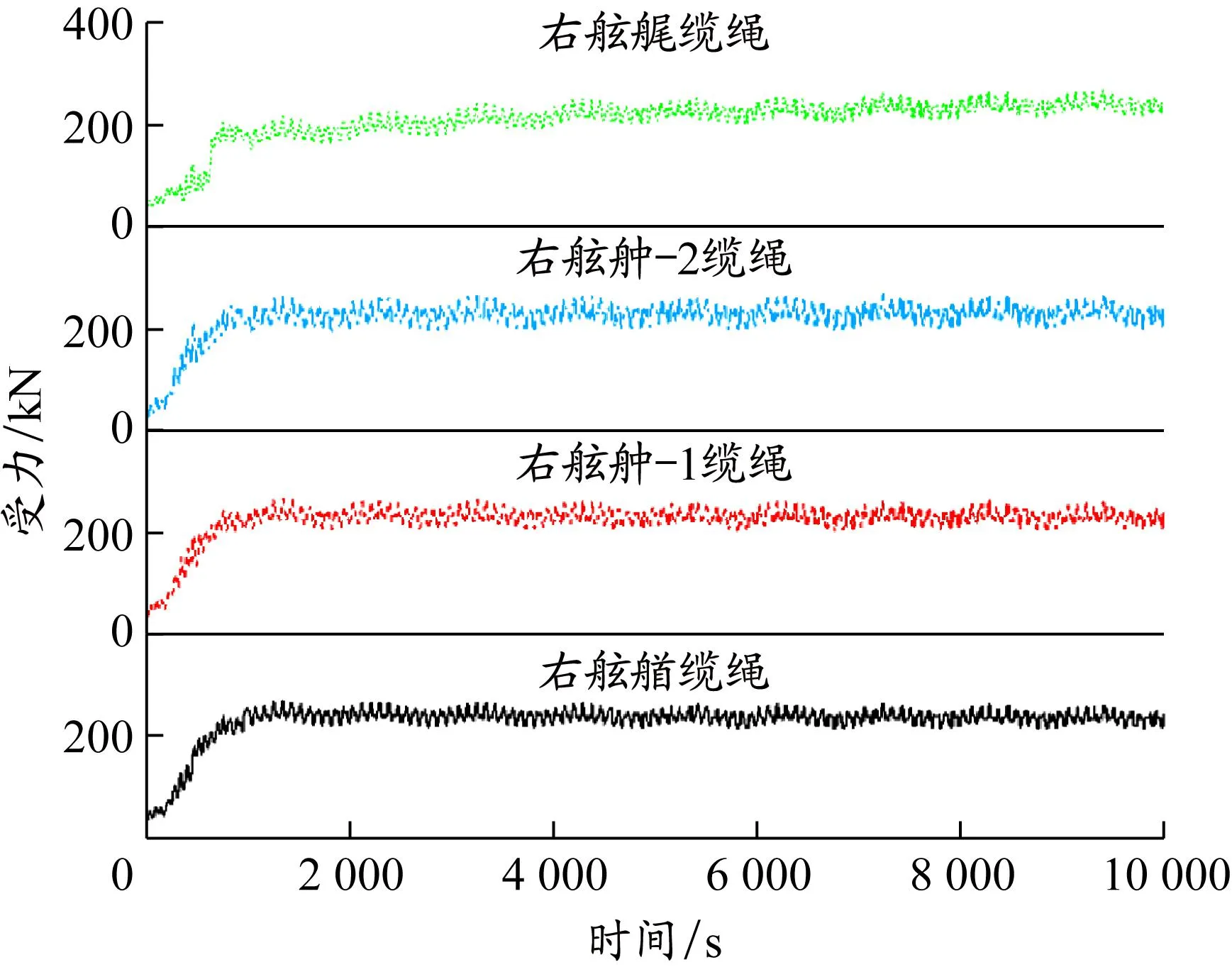
圖10 右舷各纜繩受力變化(條件1)

圖11 左舷各纜繩受力變化(條件2)
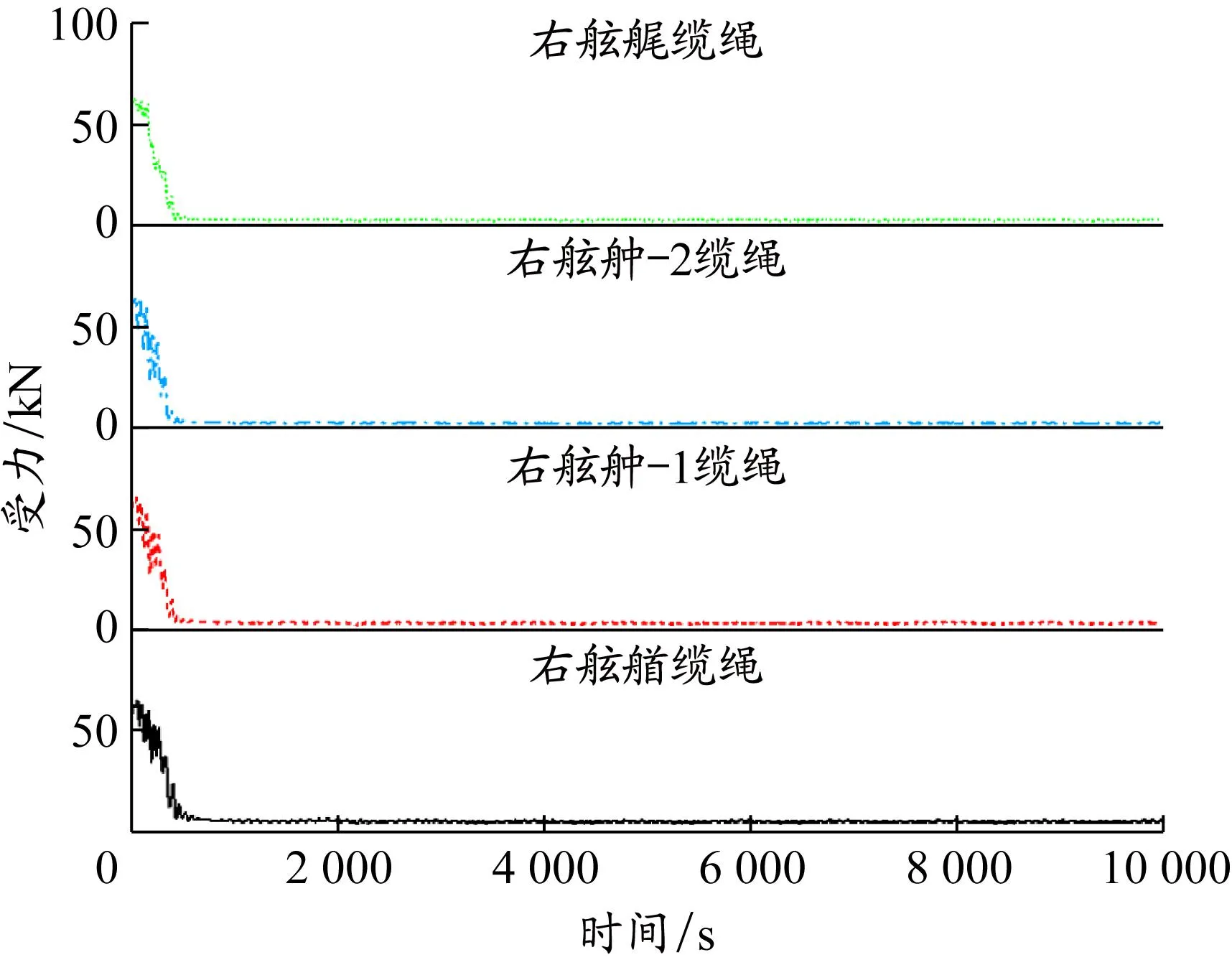
圖12 右舷側(cè)各纜繩受力變化(條件2)
由圖9~12可以看出,環(huán)境載荷對(duì)系泊纜繩受力有著重要影響。外界環(huán)境的劇烈變化對(duì)系泊纜繩產(chǎn)生較大的擾動(dòng),所有系泊纜繩張力變化顯著,且隨后纜繩受力出現(xiàn)了很明顯的振蕩。這是因?yàn)槔|繩拉動(dòng)船體運(yùn)動(dòng)時(shí),船體產(chǎn)生六自由度運(yùn)動(dòng),纜繩出現(xiàn)張緊和松弛交替循環(huán)的動(dòng)態(tài)過程,從而造成纜繩受力的不斷振蕩。各纜繩所受力大小各不相同,船舶左右兩舷的纜繩受不對(duì)稱作用力,迎流側(cè)的比背流側(cè)的大。同側(cè)纜繩的受力非常接近,因?yàn)樵谙挡磿r(shí)船舶艏艉的運(yùn)動(dòng)比較相似,其時(shí)歷曲線基本接近,系泊纜力的數(shù)值大小相近。
4.4 護(hù)舷反作用力分析
通過數(shù)值計(jì)算得出在風(fēng)、浪、流環(huán)境載荷作用下碼頭護(hù)舷的反作用力值,并與反力標(biāo)準(zhǔn)值進(jìn)行比較。
隨著船舶與碼頭接觸過程的進(jìn)行,護(hù)舷被完全擠壓,同時(shí)給予船舶反作用力使得船舶反彈離開碼頭。在系泊纜繩控制工況下,條件1和條件2下的護(hù)舷最大反作用力分別為1 324、1 079 kN,均小于護(hù)舷的設(shè)計(jì)反力標(biāo)準(zhǔn)值1 648 kN,此時(shí)該護(hù)舷完全滿足4萬t滾裝船系泊的使用要求。與條件2相比,條件1的護(hù)舷反作用力更明顯,這是因?yàn)殡S著風(fēng)浪流的大小和方向發(fā)生改變,船舶與碼頭接觸的著力點(diǎn)位置及接觸力大小發(fā)生了變化,從而使得護(hù)舷反作用力的大小也發(fā)生改變。
4.5 計(jì)算結(jié)果與OPTIMOOR軟件分析結(jié)果對(duì)比
為驗(yàn)證船舶系泊運(yùn)動(dòng)數(shù)學(xué)模型的精度,同時(shí)避免使用同種軟件進(jìn)行驗(yàn)證時(shí)出現(xiàn)的誤差,采用OPTIMOOR軟件進(jìn)行計(jì)算對(duì)比,按照?qǐng)D7設(shè)計(jì)的系纜布置方案進(jìn)行模擬計(jì)算后,得到不同環(huán)境下的系泊船體運(yùn)動(dòng)量(橫蕩、縱蕩、垂蕩和橫搖4個(gè)運(yùn)動(dòng)量)、系泊纜力和護(hù)舷受力數(shù)據(jù)。由于論文篇幅限制,只取條件1下的試驗(yàn)結(jié)果進(jìn)行驗(yàn)證,見表4~6。

表4 相似工況下船舶4個(gè)自由度上的運(yùn)動(dòng)量計(jì)算結(jié)果對(duì)比

表5 各纜繩受力對(duì)比 單位:kN

表6 護(hù)舷受力對(duì)比 單位:kN
從表4~6可知,本文計(jì)算結(jié)果與OPTIMOOR軟件分析結(jié)果具有較強(qiáng)的一致性,這說明所建模型滿足精度的要求,進(jìn)而證明了使用船舶操縱模擬器能準(zhǔn)確地模擬船舶系泊作業(yè)過程,得到真實(shí)可靠的計(jì)算結(jié)果。通常情況下計(jì)算值還會(huì)略大于OPTIMOOR軟件的分析結(jié)果,這是因?yàn)镺PTIMOOR軟件是將風(fēng)、浪、流對(duì)船舶的作用看作一個(gè)準(zhǔn)靜態(tài)問題考慮的,而船舶操縱模擬器實(shí)現(xiàn)了對(duì)環(huán)境的實(shí)時(shí)仿真。因此,基于船舶操縱模擬器的船舶泊穩(wěn)條件試驗(yàn)方法具有一定的優(yōu)越性。
4.6 大型滾裝船泊穩(wěn)分析
為能夠精確地描述和分析大型滾裝船在碼頭系泊時(shí)受到的風(fēng)、浪、流的影響,以系泊船體運(yùn)動(dòng)量、系泊纜力、護(hù)舷反作用力等3項(xiàng)指標(biāo)對(duì)其泊穩(wěn)性進(jìn)行評(píng)估,當(dāng)系泊船體運(yùn)動(dòng)量小于規(guī)范值,最大系泊纜力小于允許的最大安全工作載荷,護(hù)舷反作用力小于其設(shè)計(jì)反力時(shí),可以認(rèn)為滿足泊穩(wěn)要求。
通過上述計(jì)算結(jié)果可以看出,在兩種不同環(huán)境載荷作用下船舶在6個(gè)自由度上的運(yùn)動(dòng)量極值均未達(dá)到臨界值,其各運(yùn)動(dòng)狀態(tài)相對(duì)穩(wěn)定,對(duì)船舶泊穩(wěn)不會(huì)產(chǎn)生影響。兩種計(jì)算工況下8根纜繩的最大張力均小于纜繩的破斷載荷395 kN,因此在所有計(jì)算工況下該大型滾裝船碼頭系泊方案均能夠滿足泊穩(wěn)的要求。當(dāng)風(fēng)、浪、流等環(huán)境載荷共同作用時(shí),大型滾裝船存在向碼頭靠近的運(yùn)動(dòng)趨勢(shì),擠壓碼頭護(hù)舷,但所有計(jì)算工況下護(hù)舷反作用力均小于護(hù)舷的設(shè)計(jì)反力,該護(hù)舷滿足大型滾裝船泊穩(wěn)需求。由此得到大型滾裝船泊穩(wěn)條件,見表7。
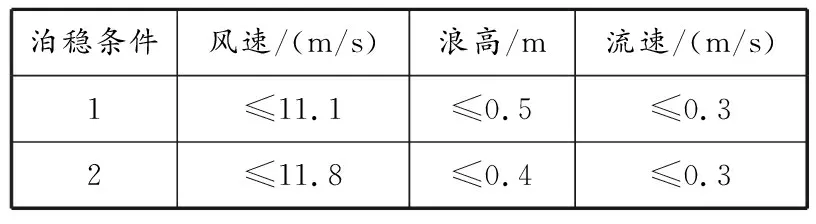
表7 4萬t滾裝船泊穩(wěn)條件
為驗(yàn)證結(jié)果的合理性和準(zhǔn)確性,改變環(huán)境參數(shù)重復(fù)進(jìn)行泊穩(wěn)試驗(yàn)。隨著風(fēng)速、浪高、流速的增加,船舶在各自由度上的運(yùn)動(dòng)量最大值增大,超過了允許的運(yùn)動(dòng)量,不能滿足安全系泊作業(yè)要求;系泊纜力均有顯著增大,超過了安全工作載荷,導(dǎo)致系泊纜繩斷裂;最大護(hù)舷反作用力的變化規(guī)律與系泊纜力的相同,超過了護(hù)舷允許的反力標(biāo)準(zhǔn)值,船舶與碼頭之間發(fā)生劇烈的碰撞。因此,表7的泊穩(wěn)條件可以作為船舶泊穩(wěn)的極限環(huán)境條件,此時(shí)4萬t大型滾裝船的泊穩(wěn)性能良好。如果實(shí)際海況劣于該海況,則整船安全會(huì)受到威脅,應(yīng)停止作業(yè)。
5 結(jié)束語
基于MMG基礎(chǔ)理論,充分考慮風(fēng)、浪、流載荷的作用,考慮系泊纜繩的線性動(dòng)態(tài)特性和船舶與護(hù)舷間的相互影響,建立了大型滾裝船系泊運(yùn)動(dòng)的數(shù)學(xué)模型,為實(shí)現(xiàn)船舶操縱模擬器的功能拓展奠定了理論基礎(chǔ)。所提基于船舶操縱模擬器進(jìn)行泊穩(wěn)條件試驗(yàn)的方法,具有較高的計(jì)算精度,不僅能夠模擬環(huán)境的動(dòng)態(tài)變化,同時(shí)還能準(zhǔn)確地反映系泊船體及其系泊纜繩自身形態(tài)的變化情況,具有優(yōu)良的實(shí)用價(jià)值和工程意義。
雖然對(duì)大型滾裝船泊穩(wěn)研究取得了較為理想的結(jié)果,但是所建立的系泊模型是基于隨機(jī)風(fēng)、規(guī)則浪和均勻流假設(shè)的,如何更詳細(xì)地計(jì)入波浪力的影響,更精確地描述船舶在系泊作業(yè)時(shí)的運(yùn)動(dòng)數(shù)學(xué)模型還有待進(jìn)一步研究。
猜你喜歡
上海交通大學(xué)學(xué)報(bào)(2023年6期)2023-07-05 08:46:18
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
艦船科學(xué)技術(shù)(2021年7期)2021-08-11 15:30:38
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
中國(guó)港灣建設(shè)(2018年5期)2018-05-19 07:35:04
中國(guó)船檢(2017年3期)2017-05-18 11:33:09
中國(guó)水運(yùn)(2014年6期)2014-08-11 09:55:22
中國(guó)水運(yùn)(2014年4期)2014-07-24 06:09:21