基于掘進參數的煤礦巷道圍巖特征識別方法研究
2023-12-29 08:25:06張西斌汪義龍楚德海李永元余俊科王冰山郭孝琛
煤礦安全 2023年12期
張西斌 ,汪義龍 ,楚德海 ,李永元 ,余俊科 ,王冰山 ,郭孝琛
(1.華能云南滇東能源有限責任公司礦業分公司 雨汪煤礦一井,云南 曲靖 655507;2.華能煤炭技術研究有限公司,北京 100070)
全斷面硬巖掘進機(TBM)是目前隧道掘進最為先進的設備,近年來逐漸應用于煤礦巷道施工[1]。在TBM 掘進過程中,圍巖狀態是否穩定對掘進施工過程有重要的影響[2],當掘進過程中遭遇斷層破碎帶等不良地質時,如未能及時采取應對措施,可能導致支護結構破裂失穩[3]、巷道圍巖的非對稱破壞[4],甚至巷道坍塌等危害極大的施工風險。因此,探尋1 種能夠及時判斷巷道圍巖狀態不穩定的方法,識別巷道圍巖的破碎特征并進行預警,使施工人員及時采取合理的支護方式,對確保掘進過程的安全高效十分重要。
現有的研究主要是利用煤礦巷道的巖體、地質等特征進行分析,從而確定巷道圍巖的穩定性。劉洪濤等[5]建立了巷道頂板巖層穩定跨距計算力學模型,依據大量鉆孔數據,將穩定巖層的位置變化作為垮頂風險的衡量指標,對巖層進行了穩定性分類;魏云杰等[6]建立了巖體回彈值和巖體抗壓強度之間以及RQD 值和完整性系數之間的量化模型,通過測量巖體RQD 值和回彈值計算圍巖的穩定性;XIE C 等[7]使用各種物理優化算法,基于圍巖的抗剪強度、單軸抗壓強度等特征,建立了巷道頂板位移預測模型,從而確保巷道穩定性;方詩圣等[8]考慮地質和水文因素,使用熵權法得到模型中各指標的權重,建立了1 個五維度云模型,實現了圍巖穩定性的評價分類。隨著數學方法和計算機技術的發展,TBM 掘進過程中的智能化程度的逐漸提高,夏毅敏等[9]研究了不同巖層下掘進參數之間的相關性,從而針對不同巖性地層進行掘進參數的調整,提高掘進效率;張慶龍等[10]提出了1 種注意力加強的Bi-LSTM 模型,實現TBM 掘進參數的精準預測,有效的輔助TBM掘進參數的調整;ZHAO J 等[11]提出了1 種基于TBM 運行數據來預測地質類型的框架,能夠精準預測出地層的地質類型。
上述判斷煤礦巷道圍巖穩定性的方法需要大量的巖體、地質數據,而依據地勘報告難以準確得到巷道沿線準確的地質變化情況,需要停機操作并使用超前鉆探取心方法測量巖體地質參數,這會降低掘進效率,同時智能化程度較低。因此,以某煤礦瓦斯治理巷道工程為研究對象,將掘進參數應用于圍巖狀態穩定性判斷中,提出1 種巷道掘進過程中實時高效的圍巖特征識別方法。
1 煤礦巷道的圍巖特征識別方法
1.1 基于撐靴油缸行程的數據集獲取
相較于非煤礦領域的圍巖,煤礦瓦斯治理巷的圍巖強度更低,具有斷面尺寸小、巖石強度不高、地層較均一等特點。在煤礦瓦斯治理巷道掘進過程中,一環巷道掘進完成后,撐靴油缸伸出,使撐靴頂緊巷道洞壁產生摩擦力,從而承受主機和連接橋的部分重力,撐靴組件用來調整、保持盾構掘進方向和姿態[12]。當巷道掘進遇到破碎圍巖時,撐靴不能獲得足夠的支撐力就會一直向前伸出,當撐靴油缸行程超過一定值時(一般取200 mm)判斷為異常。
在TBM 結構設計上,撐靴中心和工作面有一定長度的距離,某煤礦瓦斯治理巷道TBM 部分結構示意圖如圖1,圖中撐靴中心和工作面之間距離為L,則當測量到撐靴油缸行程時,撐靴部分的巷道已經完成掘進,因此依靠撐靴油缸行程判斷TBM 刀盤開挖圍巖狀態的穩定性具有滯后性。
本研究根據全斷面硬掘進機(TBM)撐靴油缸行程獲取圍巖特征識別方法的數據集,在記錄撐靴油缸行程t1~t4時間內,撐靴油缸行程出現異常的時刻為t2, 撐靴油缸行程恢復正常的時刻為t3,且t1<t2<t3<t4,則異常撐靴油缸行程的時間段為t2~t3, 正常撐靴油缸行程的時間段為t1~t2、t3~t4。考慮撐靴中心與工作面之間的距離,根據異常撐靴油缸行程時間段推算出圍巖狀態發生改變的時間段,v為TBM 的推進速度平均值,mm/min,則圍巖狀態轉變段時間段為 (t2-L/v)~ (t3-L/v),圍巖狀態穩定段時間段為 (t1-L/v) ~ (t2-L/v)、(t2-L/v)~ (t4-L/v)。
對于某煤礦瓦斯治理巷道,基于撐靴油缸右上行程、右下行程、左上行程、左下行程的數據,繪制隨時間變化的圖像,撐靴油缸行程隨掘進時間的變化曲線如圖2。
觀察圖2 中的撐靴油缸行程變化,可以看出總共有3 段行程變化較大的部分,選取其中2 部分時間段進行推算,則圍巖狀態轉變段為4 500~9 500 min 時間段,圍巖狀態穩定段為45 000~54 000 min 時間段,將這2 段時間段的掘進參數數據作為圍巖破碎特征識別方法的數據集。
1.2 基于掘進參數的圍巖特征識別方法
基于撐靴油缸行程獲取的數據集,即得到圍巖狀態轉變段數據集和圍巖狀態穩定段數據集,本研究選取巷道圍巖穩定段掘進參數數據作為數據集,訓練得到掘進參數的LSTM 預測模型,使用訓練的LSTM 模型參數對出現圍巖狀態改變的掘進段進行預測。在一定長度的煤礦巷道圍巖中,巷道圍巖地質均一、掘進參數處于穩定變化,對于不穩定的圍巖狀態,預測的掘進參數和實際數據的偏差程度會增大,即可以將LSTM 模型預測數據和測量數據之間的偏差程度作為識別指標,識別出圍巖狀態的改變。煤礦瓦斯治理巷道的圍巖特征識別方法流程圖如圖3。
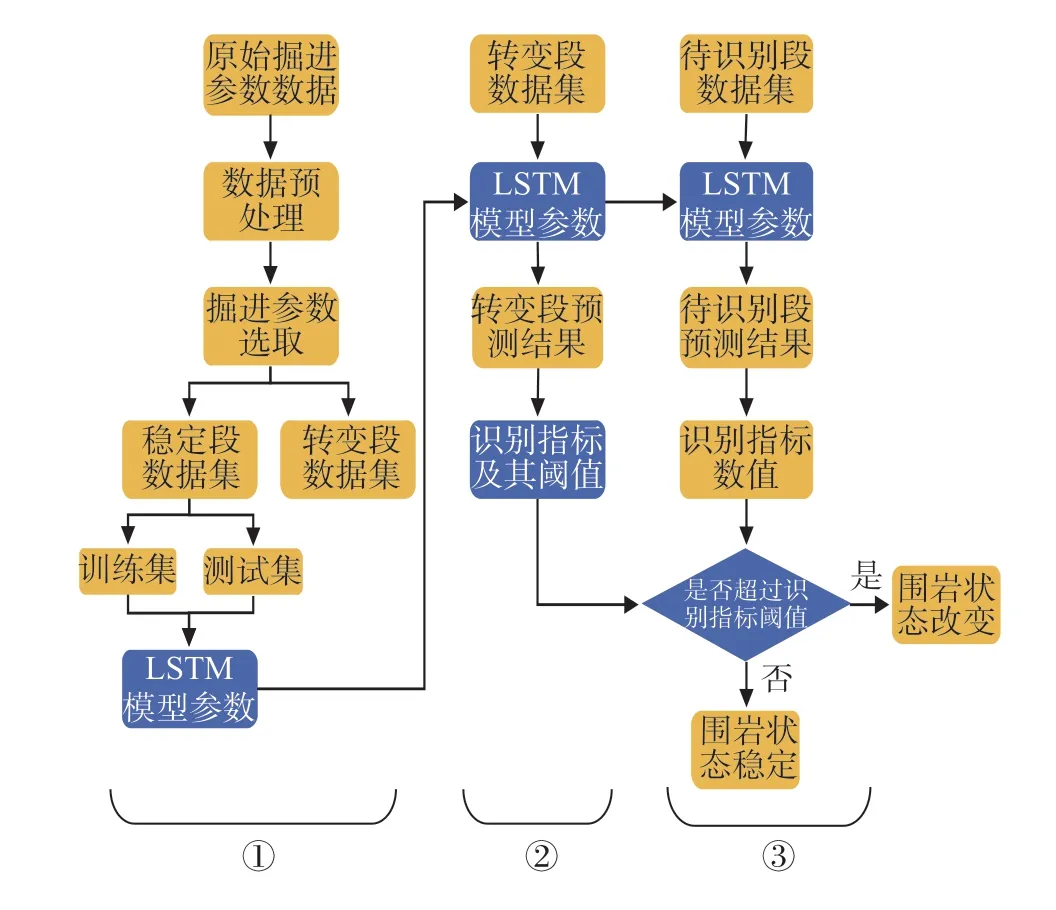
圖3 煤礦瓦斯治理巷道的圍巖特征識別方法流程圖Fig.3 Flow chart of surrounding rock feature identification method for coal mine gas control roadway
煤礦瓦斯治理巷道的圍巖特征識別方法可以分為3 步,具體如下:
1)掘進參數的預處理及預測。對傳感器記錄的掘進參數進行數據預處理和相關性分析,選取相關性較大的掘進參數,然后將圍巖狀態穩定段的掘進參數數據輸入到LSTM 模型中,訓練LSTM模型,得到的LSTM 模型的模型參數。具體流程如圖3 中①部分。
2)識別指標及其閾值的確定。將圍巖狀態轉變段的掘進參數數據輸入到已經訓練好的模型中,使用LSTM 模型參數進行預測,分析掘進參數的預測值和真實值,得到圍巖狀態識別指標和識別指標的閾值。具體流程如圖3 中②部分。
3)待識別段的圍巖破碎特征識別。將一段連續的掘進參數數據輸入到模型中,計算得到識別段數據的識別指標,若該段識別指標穩定在正常波動范圍,不持續超過閾值,則說明該段掘進狀態符合圍巖狀態穩定段的變化,表明該段掘進狀態也是穩定的;反之,若識別指標連續超過閾值,則預測的結果和實際數據偏差較大,表明該段圍巖狀態發生了轉變,出現了破碎圍巖狀態。具體流程如圖3 中③部分。
2 數據的預處理
在TBM 實際掘進過程中記錄的數據中,包含許多停機、設備維護等非掘進狀態的數據以及啟動、換刀等非穩定掘進的數據,這些數據對異常掘進狀態的識別影響很小,甚至會產生干擾。因此在進行掘進參數的異常掘進狀態識別前,需要對掘進參數數據進行處理。
2.1 非掘進狀態數據剔除
基于某煤礦治理巷道的數據進行非掘進狀態數據剔除。對于非掘進狀態下,記錄的大量停機、設備維護等掘進數據,采用二值判別函數[13]D(x)進行剔除,具體公式如下:
式中:F為TBM 總推進力,kN;v為推進速度平均值,mm/min;T為刀盤轉矩,kN·m;n為刀盤轉速,r/min。
從式(1)、式(2)、式(3)可以得到,僅當總推進力、推進速度平均值、刀盤轉矩和刀盤轉速均大于0 時,推進機狀態,最終剔除非掘進狀態后的刀盤轉速數據。
2.2 啟動和停止段數據剔除
在掘進過程中,TBM 的掘進狀態下還包括啟動階段、穩定階段和停止階段的3 種掘進狀態,只有穩定掘進的數據能夠表示掘進過程的變化。通過分析采集的掘進數據的變化規律,選擇按照以下規則對啟動和停止段數據進行篩選:若當前時間點t1的推進速度小于0,則判斷該時間點間隔180 s 后的時間點t2數據,若t2數據不小于掘進參數的0.2 分位數,則保存這180 s 的數據。
2.3 掘進數據的去噪
小波變換[14]用于分解時間序列,對數據進行多頻率分解,提取不同頻率成分的分量,將低頻率和高頻率信息分解,能更好地提取數據趨勢和特征,提高數據的抗干擾性。對于信號f(t),用小波函數集{ φα,τ(t)}進行分解,小波變換計算式為:
式中: α為尺度參數; τ為平移參數; φ?(t)為共軛函數;WT 為小波變換。
在巷道掘進過程中,由于機器的運行和環境干擾等因素,掘進數據中存在一些干擾波動,因此使用小波變換對掘進數據進行去噪,選擇db4小波基函數對采集的數據進行4 層小波分解,變換后數據中的高頻成分減少、變化特征更加明顯。小波變換前和小波變換后的刀盤轉速如圖4。
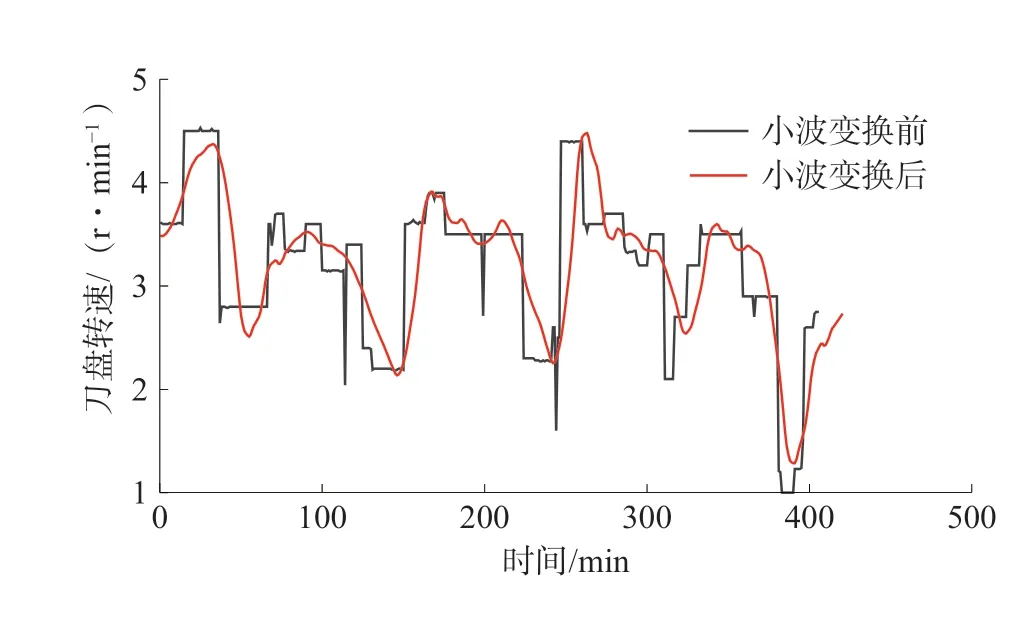
圖4 小波變換前后的刀盤轉速Fig.4 Cutter head rotation speed before and after wavelet transform
3 基于LSTM 模型的掘進參數預測
3.1 掘進參數的選取
在TBM 運行過程中,記錄的參數種類復雜和繁多,因此先對記錄的掘進參數進行相關性分析,探討不同參數和圍巖特征之間的相關程度,篩選出相關性較大的掘進參數作為識別的輸入特征參數。根據圍巖狀態穩定數據段和圍巖狀態轉變數據段的各個參數值數據,與圍巖狀態進行相關性分析。
對于不同的研究對象,有多種相關性的計算方式,本研究選擇常用的Pearson 相關系數,計算變量m和n的 相關度rmn的計算公式如下:
式中:mi為變量m的第i個 數 據值;ni為 變量n的第i個數據值;a為數據點的個數。
通過Pearson 相關系數對記錄的參數與圍巖掘進狀態是否發生改變進行詳細的關聯分析,記錄的多種掘進參數的相關性都不明顯,從最能反映圍巖狀態的掘進參數的角度,最終選取5 個參數分別為:“刀盤轉速”、“推進速度平均值”、“刀盤轉矩”、“撐靴撐緊力”、“總推進力”,這5 種參數和圍巖狀態的轉變的相關性見表1。
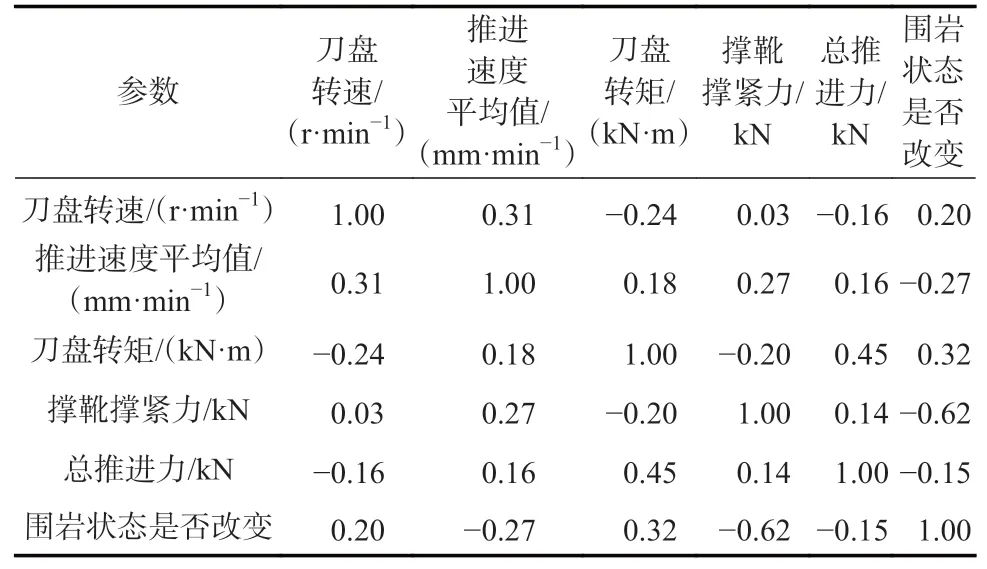
表1 掘進參數相關性表格Table 1 Correlation table of tunneling parameters
由表1 可以看出:5 種掘進參數與圍巖狀態是否改變呈弱相關,相關性都在0.2 附近,其中撐靴撐緊力與圍巖狀態是否改變的相關性最強且呈負相關性,這是因為在遇到破碎圍巖時,撐靴油缸行程會增加,同時撐靴撐緊力會出現減小。
3.2 LSTM 模型原理和預測過程
LSTM 即為長短期記憶網絡模型,是1 種特殊的循環神經網絡,在循環神經網絡的基礎上增加記憶細胞(cell)單元,LSTM 主要通過記憶單元結構讓網絡節點的權重隨時間改變、控制信息的遺忘和記憶,解決RNN 的梯度消失和梯度爆炸問題,從而更適用于處理時間序列數據[15]。
LSTM 中存在3 種結構控制信息的保留和遺忘,分別是遺忘門、輸入門和輸出門。遺忘門控制前一時刻輸出有多少信息保留在當前記憶單元Ct;輸入門決定當前時刻的輸入有保留多少信息保存在當前記憶單元Ct, 輸出門決定當前記憶細胞Ct有多少輸出到當前t時刻隱藏層輸出值ht。
LSTM 模型訓練過程如圖5。
基于預處理后的掘進參數數據集:①首先對數據集進行劃分,按照7:3 的比例劃分為訓練集和測試集,將訓練集輸入到LSTM 模型中訓練,前向傳播計算模型的代價函數;②判斷代價函數是否滿足要求,若不滿足則進行反向傳播更新模型的參數;③當代價函數滿足要求時,輸出此時的模型網絡參數;④將測試集輸入到已經訓練完成的LSTM 模型參數的預測模型中,對模型的預測效果進行評估。
4 圍巖特征識別方法應用
4.1 LSTM 模型的訓練結果
將圍巖特征識別方法應用在某煤礦瓦斯治理巷道上,根據LSTM 模型訓練流程,以圍巖狀態穩定段數據為數據集完成“刀盤轉速”、“推進速度平均值”、“刀盤轉矩”、“撐靴撐緊力”、“總推進力”5 種掘進參數的LSTM 模型訓練;然后分別將圍巖狀態穩定段和轉變段的5 種掘進參數數據輸入到訓練好的LSTM 模型中,得到圍巖穩定段和圍巖轉變段預測結果。
根據訓練的結果發現“刀盤轉速”和“總推進力”隨著掘進過程中圍巖的狀態而改變,對圍巖狀態改變的敏感度高。將“刀盤轉速”和“總推進力”的圍巖狀態穩定段和轉變段的預測結果和真實值進行比較,得到的刀盤轉速和總推進力真實值及預測值變化曲線如圖6。
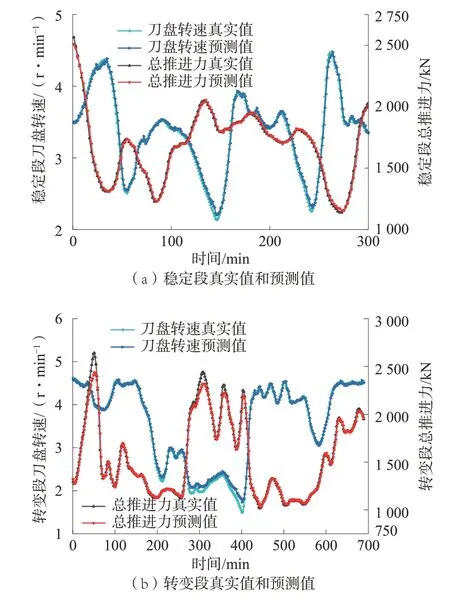
圖6 刀盤轉速和總推進力真實值及預測值變化曲線Fig.6 Curves of real values and predicted values of cutter rotational speed and total thrust
從圖6 中可以看出:整體上圍巖狀態穩定段、轉變段的預測值和真實值均比較接近;在圍巖狀態穩定段,刀盤轉速和總推進力的預測值和真實值偏差很小(圖6(a));在圍巖狀態轉變段,刀盤轉速和總推進力的預測值和真實值局部有明顯的誤差出現(圖6(b))。
4.2 圍巖特征識別的指標及其閾值
在煤礦的TBM 掘進過程中,刀盤轉速一般是操作人員主動控制,而不是隨圍巖狀態的改變而改變的參數,總推進力是隨圍巖狀態而改變的參數,能夠反映圍巖狀態的變化,因此選用總推進力作為圍巖狀態是否發生改變的識別參數。
平均絕對百分比誤差(mape),是1 種常見的準確度或誤差測量的評估指標,其計算公式為:
式中:n為計算的數據個數;為LSTM 對掘進參數的預測值;yi為掘進參數的真實值。
計算預測模型的mape,評估模型對掘進參數的預測效果。根據總推進力的LSTM 預測結果,計算得到圍巖穩定段的mape 為0.016,圍巖轉變段的mape 為0.017,整體上LSTM 對總推進力的預測達到了98%以上的準確率,表明對總推進力的預測效果較好。
相對誤差的百分比(αy)表示預測值和真實值相對誤差的百分比,使用相對誤差百分比作為衡量模型預測值和真實值偏差的指標,其計算公式為:
以總推進力預測值和真實值之間的相對誤差百分比作為圍巖狀態的識別指標,根據式(7)計算總推進力的相對誤差百分比,繪制的轉變段總推進力預測誤差變化圖如圖7。
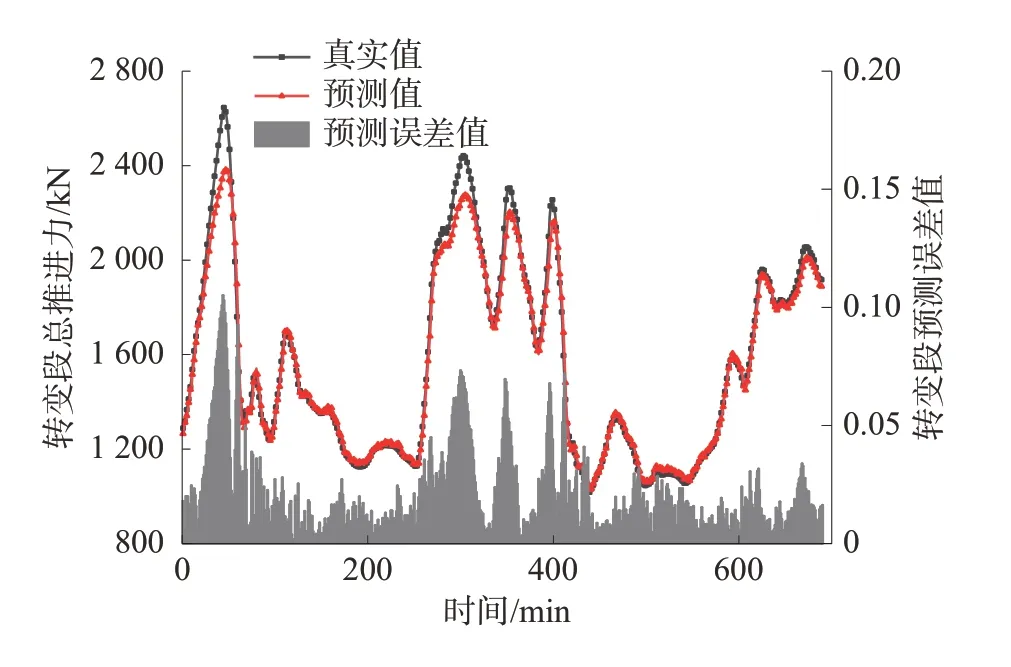
圖7 轉變段總推進力預測誤差變化圖Fig.7 Variation chart of total thrust prediction error
由圖7,從整體看,總推進力預測值與真實值能夠很好地擬合,在局部段出現了預測值與真實值較大地誤差,將該段識別為存在圍巖狀態的改變,因此得到總推進力的相對誤差百分比的閾值為5%,超過閾值則判斷該段掘進存在破碎圍巖。
4.3 圍巖特征識別效果
基 于某煤礦治理巷道工程數據,將圍巖狀態待識別段的總推進力數據輸入到LSTM 預測模型中,根據總推進力的預測值和真實值,依據圍巖特征識別指標的計算公式,計算預測值和真實值相對誤差百分比,總推進力相對誤差百分比變化曲線如圖8。

圖8 總推進力相對誤差百分比變化曲線Fig.8 Variation curve of relative error percentage of total thrust
分析圖8 可以看出:整體上相對誤差百分比穩定在5%以下,局部存在一些出現短暫增大的時間點,是由于掘進過程中會出現噪聲等干擾,不能用來判斷圍巖狀態是否改變。因此根據掘進的具體情況分析,使用以下規則判斷圍巖狀態是否改變:以預測的總推進力和真實的總推進力的相對誤差百分比為5%作為閾值,若在連續的30 個時間序號中存在20 個超出閾值,即總推進力的相對誤差百分比出現了密集且明顯增大,則判斷圍巖狀態發生改變。
根據圍巖異常判斷的規則,對圖8 對應的圍巖特征進行識別,識別在3 個數據段發生圍巖狀態的改變,存在破碎圍巖特征,對比使用撐靴油缸行程判斷的結果,2 種方法的判斷結果一致,證明該圍巖特征識別方法的準確性和有效性。根據上文的分析,可以判斷在這3 個部分存在圍巖狀態的改變,表明該掘進段可能出現了破碎圍巖,需要進行支護方式的調整,從而保證煤礦巷道掘進的安全性,不影響后續的煤礦瓦斯治理工作。
5 結 語
1)基于某煤礦實際工程數據,對數據進行預處理,剔除非掘進狀態的數據和非穩定掘進的數據,同時采用小波變換進行分解,去除數據中的高頻成分,得到了趨勢特征更加明顯的數據。
2)基于撐靴油缸行程選取圍巖狀態穩定段和轉變段數據,根據相關性分析和LSTM 模型訓練結果,選取總推進力為判斷圍巖狀態是否發生改變的識別參數,使用LSTM 模型對總推進力預測,圍巖穩定段計算的平均絕對百分比誤差mape 為0.016,圍巖轉變段預測的平均絕對百分比誤差mape 為0.017,整體上LSTM 對總推進力的預測達到了98%以上的準確率,預測效果較好。
3)根據LSTM 預測模型的圍巖穩定段和轉變段的總推進力預測結果,以總推進力的預測值和真實值的誤差百分比為指標識別圍巖特征,當記錄的數據段誤差百分比連續超過5%時,判斷該部分圍巖狀態發生改變,存在破碎圍巖,將該識別方法應用到某煤礦瓦斯治理巷道中,識別結果和撐靴油缸行程的判斷一致。
4)對巷道掘進過程中破碎圍巖特征的識別,相較于測量地質巖體參數和通過撐靴油缸行程判斷的方法,使用提出的圍巖狀態識別方法,能夠減少人工參與的程度,智能化程度更高,同時能夠在掘進中及時判斷前方圍巖是否出現破碎段狀態,指導施工人員調整巷道的支護方式,從而保證巷道施工的安全。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華建設(2019年12期)2019-12-31 06:47:58
江西建材(2018年4期)2018-04-10 12:37:22
光學精密工程(2016年6期)2016-11-07 09:07:19
煤炭學報(2015年10期)2015-12-21 01:55:09
山西煤炭(2015年4期)2015-12-20 11:36:18
江西煤炭科技(2015年1期)2015-11-07 03:06:32
核科學與工程(2015年4期)2015-09-26 11:59:03