中國空間站首組“全身像”是如何誕生的
2023-12-29 00:00:00
科學(xué)大觀園 2023年24期
11月28日,中國載人航天工程辦公室發(fā)布了中國空間站組合體全貌的高清圖片,這是我國首次在軌獲取以地球為背景的空間站組合體全貌圖像,也是中國空間站的首組全構(gòu)型工作照。大家也許會好奇,這組照片是怎么拍攝的呢?
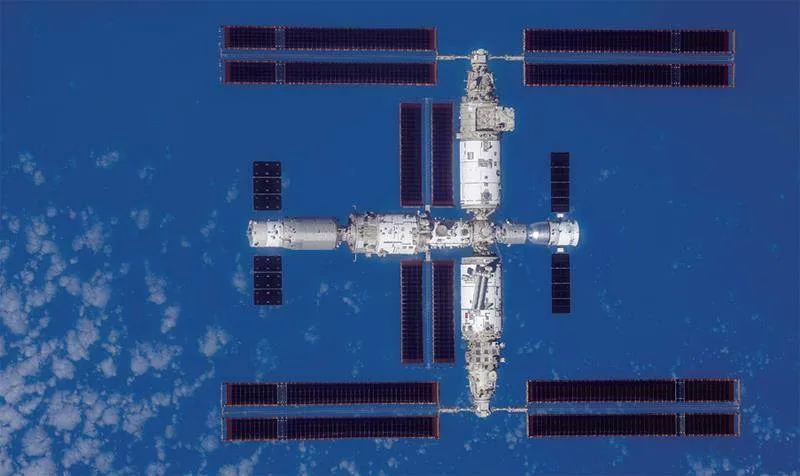
北京時間2023年10月30日20時37分,神舟十六號載人飛船與空間站組合體成功分離。分離后,神舟十六號航天員手持高清相機,通過飛船繞飛完成了以地球為背景的空間站組合體全景圖像拍攝。而要從飛船拍攝空間站,必須滿足哪些條件呢?
要拍攝空間站,最好的視角是在空間站上方,這個視角有別于此前飛船相機拍攝的同一平面的全景,能夠更好地展示空間站的全貌。如何去到合適的位置呢?神舟十六號載人飛船首先從空間站徑向?qū)涌诜蛛x撤離至200米停泊點,然后利用繞飛的“絕活”,飛至空間站前方停泊點,再從前方停泊點繞飛至后方停泊點,而拍攝的時機就選擇在從空間站前方向后方繞飛過程當中。
繞飛,是指飛船環(huán)繞空間站的飛行,繞飛充分利用了相對運動的動力學(xué)特性,通過施加特定的脈沖控制,從空間站看去飛船將沿著橢圓軌跡繞空間站運動。繞飛功能非常重要,可以實現(xiàn)不同停泊點和對接口之間的轉(zhuǎn)移,從而改變飛船的對接方向。
繞飛拍攝過程使用了飛船返回艙的舷窗,在飛船正常姿態(tài)飛行下,舷窗是分布在返回艙的左右兩側(cè),以此姿態(tài)飛越空間站時,航天員是不能從舷窗中拍攝空間站的,因此要想找到合適的拍攝角度,飛船必須進行一個滾動姿態(tài)調(diào)整,讓舷窗變成一上一下,通過下方舷窗進行拍攝,這就需要“太空全能舵手”——神舟飛船的制導(dǎo)導(dǎo)航與控制(GNC)系統(tǒng)大顯身手了。
相對于此前神舟十號載人飛船“平移”式繞飛和神舟十二號載人飛船繞飛過程中水平轉(zhuǎn)體180度,神舟十六號載人飛船的繞飛動作要復(fù)雜得多。為了能讓舷窗對著地球,飛船需要在繞飛過程中完成大幅度的滾動和轉(zhuǎn)動動作。
也就是說,在分離撤離過程中,飛船姿態(tài)在垂直下方至前方繞飛時轉(zhuǎn)為倒飛,前方至后方繞飛時飛船轉(zhuǎn)為正飛,同時滾動90度調(diào)姿,以這個姿態(tài)掠過空間站進行拍攝,到達空間站后方時,姿態(tài)恢復(fù)正常,并施加一個反向的撤離脈沖,最終遠離空間站。
整個繞飛過程中,為了精確控制飛船和空間站的相對運動軌跡,必須盡可能地讓飛船的頭部朝著空間站,GNC系統(tǒng)要兼顧特殊姿態(tài)下中繼天線與中繼衛(wèi)星的鏈路鏈接,確保地面能夠監(jiān)視和干預(yù)的同時,控得準控得穩(wěn)。
此外,還需要滿足幾個約束條件確保拍攝順利地進行:一是測控約束,繞飛的關(guān)鍵弧段要位于中繼衛(wèi)星測控區(qū)內(nèi),便于地面對飛船進行狀態(tài)監(jiān)視和控制;二是光照約束,拍攝過程要在光照區(qū)內(nèi)進行,光照角度也需要精心設(shè)計,確保拍出的照片具有完美的光照條件;三是安全距離約束,為了確保航天員安全,繞飛全程飛船不能進入空間站禁飛區(qū),必須時刻遵循“安全第一”的原則。
◎ 來源| 中國載人航天工程網(wǎng)
