色塊苗軟薄容器基質機械化裝填關鍵技術探討
2024-01-03 03:32:30樓婷婷張加清
農業開發與裝備 2023年11期
關鍵詞:作業
王 濤,費 焱,樓婷婷,張加清
(金華市農業科學研究院,浙江金華 321017)
0 引言
色塊苗,觀賞苗木,用于布置綠化景觀的彩葉植物。色塊苗種植是園林綠化、公路綠化應用中最常見的作物配置方式,抗性強、適應性強、群體效果好,色塊苗的興起拉開了綠化苗木“色葉時代”的序幕,具有十分重要的經濟價值和研究價值[1]。目前,色塊苗常用的顏色主要有紅黃綠三種,品種有紅葉石楠、金森女貞、金葉六道木、金邊黃楊等。近年來,國家省市各級政府相繼提出了“美麗中國”“城市彩化”“彩色浙江”等建設內容,這些建設內容的提出大大增加了色塊苗的市場需求空間,色塊苗產業迎來新的發展機遇。
目前,色塊苗的快繁以扦插繁殖最為廣泛,既可以經濟地利用繁殖材料進行大量育苗和多季育苗,又可以較好地保持母體的優良性狀,迅速成苗[2-3]。色塊苗的快繁需扦插于裝有基質的軟薄容器中,因此色塊苗快繁的頭道工序即為軟薄容器基質裝填,作業量大、強度高,且普遍存在“趕時裝填、趕時扦插”的情況,而與之矛盾的是軟薄容器基質裝填裝備供給不足,嚴重制約了色塊苗產業的發展。因此,基于國內外基質裝填機的研發現狀,在分析色塊苗軟薄容器機械化裝填存在問題的基礎上,提出提升改進色塊苗軟薄容器基質裝填裝備的關鍵技術研究方向和建議,對加快色塊苗機械化生產發展具有重要意義。
1 國內外基質裝填機研發現狀
國外發達國家容器育苗技術從20世紀50年代中期就已經開始,到了70年代初期,容器育苗相關的技術和設備已獲得了積極推廣和較為廣泛的應用。目前,荷蘭、德國、比利時等國家均已有成熟的基質裝填機,具有工作效率高、性能穩定可靠、自動化程度高、適應范圍較廣的優點,其中典型的機型主要有Javo-Standar、Demtec-Smart、Maver-Tm2700XL等(圖1,圖2,圖3),部分機型已完成了與定植移栽裝備的無縫對接[4-6]。從國外進口的部分基質裝填機的生產應用情況來看,存在價格昂貴、體積龐大、動力要求大、維修困難、與色塊苗軟薄容器裝填環節不匹配等缺點,在色塊苗基質裝填作業環節尚未有應用的案例。

圖1 Javo-Standar型基質裝填機

圖2 Demtec-smart型基質裝填機
圖3 Maver-Tm2700XL型基質裝填機
針對基質裝填作業量大,裝填機空白的情況,國內一些科研單位和企業對基質裝填機開展了初步的探索和實踐[7-10],如沈陽農業大學開發了一種多組疊摞容器同時自動分離裝置(圖4),農業農村部南京農業機械化研究所開發了一種容器基質裝填機(圖5),順意科技開發了一種半自動容器基質裝填機(圖6),臺灣亦祥公司開發了一種可裝填軟質容器的基質裝填機(圖7)。然而,就總體情況而言,目前國內的基質裝填機械化程度還處在一個較低的水平,僅僅是在示范育苗基地實現了無病毒容器育苗的裝填機械化,與容器育苗相關的機械設備至今依舊沒有形成規模化的生產體系和商業化推廣。現階段基質裝填機技術研究主要集中在PE硬質容器上,多為固定式基質裝填機,自走式的基質裝填機幾乎沒有報道,且未能充分考慮作業環境復雜性,缺乏理論分析,對關鍵作業部件缺少系統性研究,自動化、智能化水平較低,通用性相對較差。
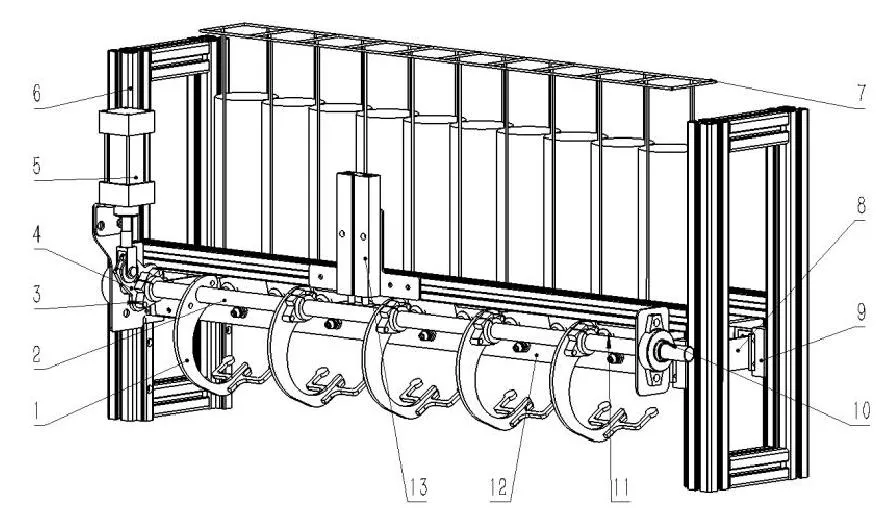
圖4 多組疊摞容器同時自動分離裝置結構圖
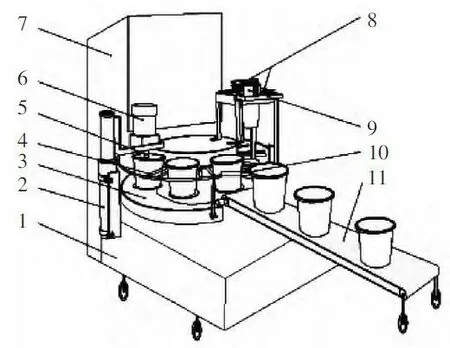
圖5 容器基質裝填機結構圖

圖6 順意科技半自動容器基質裝填機

圖7 臺灣亦祥可裝填軟質容器的基質裝填機
2 機械化裝填機存在問題
2.1 農機農藝匹配性差
目前,色塊苗扦插快繁技術一般采用小規格的黑色塑料軟薄容器,擺放后的容器相互緊挨,畝均擺放數量多達15 000~20 000個,因此要求色塊苗容器基質裝填機須為自走式,在基質裝填的同時完成容器就地擺放在地面上。然而,目前的基質裝填機多為固定式的,放在固定場地進行裝填作業,之后需要人工將裝填好的容器搬運擺放在相應田塊地面上,此環節需要大量的勞動力,且作業過程繁瑣,因此現有的基質裝填機機型無法滿足色塊苗容器扦插快繁的生產模式。
2.2 復雜環境適應性差
色塊苗軟薄容器的基質裝填作業環境使得在裝填作業中存在地塊小、地壟彎曲、平整性差等一系列問題,導致首先現有的基質裝填機機型基本沒辦法適應。首先,色塊苗地塊尺寸普遍較小,在機械化裝填作業時要頻繁掉頭,從而要求裝填機動力底盤尺寸要盡可能小,再加上栽培模式的限制,使得裝填機只能選擇較小的動力底盤,從而存在現有動力底盤不適應的難題。其次,色塊苗栽培地塊不規則、土地平整性差,一般采用微耕機進行開溝起壟,作業時容易走彎,地壟直線度較低,由此導致作業時基質集攏提升和容器擺放與地壟相對位置存在偏差,導致基質集攏和容器擺放困難,影響裝填作業效果。
2.3 軟薄容器分離性差
色塊苗扦插快繁使用的容器為小規格多層疊摞黑色軟薄容器,單個無法依靠自身定型,現有撥叉式機構無法實現容器自動分離下落,需從原理上重新對容器自動抓取碼放機構進行創新,綜合分析機械分離和真空吸附分離現有兩種技術方案的優缺點,選出可行性最高的方案;且黑色軟薄容器無法單個直立,在裝填和壟上擺放過程中難以保持姿態穩定,因此與硬質容器裝填存在較大差異,需配套設計軟薄容器網格定位扶持裝置進行直立定位和基質裝填,保證基質裝填和容器擺放質量。
2.4 經濟效益提高不明顯
容器基質機械化裝填除了要解決勞動力短缺的問題,更需要實現質量和效率的提升,最終達到提高種植戶經濟效益的目的。然而,現有的基質裝填機機型對大多數種植戶來說,經濟效益提高并不明顯。首先,色塊苗地塊尺寸普遍較小,在裝填作業時基質裝填機需要頻繁掉頭,大大影響裝填作業效率。其次,色塊苗軟薄容器機械化裝填作業工況復雜,容易造成在裝填過程中發生容器側翻、容器裝填密度不一致、作業堵塞和扭矩過載等問題,而作業過程中缺少作業參數采集監測,需要工作人員停機檢測,大大降低工作效率。此外,在環境較差的條件下裝填質量未能達到人工裝填質量,影響色塊苗扦插快繁質量,進而造成種植戶經濟損失。
3 裝填裝備提升改進的關鍵技術
3.1 裝填機專用動力底盤開發
動力底盤是自走式農機裝備的重要組成部分,其性能直接影響整機的作業質量和效率。近年來,國內外學者基于“高效、智能、環保”等角度,在行走驅動、動力換擋、線控轉向等方面取得了創新性成果,可為裝填機專用動力底盤開發提供技術借鑒。針對色塊苗軟薄容器基質裝填復雜作業工況和底盤動力不足問題,建立田間土壤與專用動力底盤物理力學耦合模型,優化專用動力底盤驅動參數,解決其驅動性弱、附著性差的問題;采用模塊化、小型化設計思路,研制與動力底盤相匹配的動力傳動系統、動力分配控制系統,優化配置動力源、轉向系統,充分發揮動力性能,采用三維軟件進行專用動力底盤整體建模,集成開發專用動力底盤,保證裝填機在各種復雜環境下穩定行走。
3.2 自動對壟技術
目前,自動壟技術主要通過主動調整動力底盤和作業部件相對位置解決壟形直線度差的問題,提高對地壟彎曲變化的適應能力,有效解決由于作業部件位置偏差導致作業質量下降的問題。因此,自動對壟技術是提高基質裝填裝備的自動化水平和作業性能的關鍵所在,有必要進行自動對壟技術的研究。現有自動對壟技術主要通過作業過程中地壟彎曲數據的檢測、分析和計算獲得作業部件應調整到達的位置并驅動相應的執行機構完成對壟調整。開發能夠在作業狀態時獲取清晰的地壟和壟溝的動態圖像采集模塊,研發圖像處理識別模塊,能夠有效提取地壟圖像,實現快速識別地壟縱向中心位置;研制依據地壟縱向中心位置實時精準控制動力底盤轉向對壟控制模塊,集成開發裝填作業自動對壟系統,實現裝填作業過程中自動對壟,能夠較好地壟彎曲現象對機械化裝填造成的難題,保證裝填質量,提高基質裝填機的使用效果和穩定性。
3.3 軟薄容器自動抓取碼放機構開發
軟薄容器自動抓取碼放機構是裝填機的核心作業部件,其主要功能是將疊放在一起的容器抓取并分離,要求每次只能抓取一個容器,碼放容器定位網格定位扶持裝置內姿態穩定,不能有傾倒現象,不影響其他工位的順利工作。針對小規格多層疊摞軟薄容器難以抓取的難題,建立吸盤吸持力學模型,通過數值仿真、田間試驗探究吸盤結構參數、振動參數、真空度對抓取分離效果的影響規律,研制由壓縮機、振動器、吸盤等組成的振動吸盤式新型末端執行器;分析多末端聯合連續作業軌跡,優化直角坐標碼放機構參數,優化配置驅動元件,搭建機構樣機平臺,以其關鍵的結構參數和工作參數為影響因素,對作業性能進行優化試驗研究,實現小規格多層疊摞軟薄容器自動高效抓取碼放于容器定位網格定位扶持裝置內,保證整機作業效率和質量。
3.4 軟薄容器基質裝填智能控制系統開發
軟薄容器基質裝填機控制系統設計主要包括控制系統硬件設計和控制系統軟件設計兩個方面,其主要功能是控制動力底盤行走、基質集攏升運、容器自動抓取碼放、容器直立定位、基質精準裝填和容器擺放連續作業各個工位動作按照一定的邏輯關系進行運動,順利有序完成各個動作,要求控制邏輯清晰,控制系統安全可靠,滿足運行要求。因此,針對軟薄容器基質裝填智能控制要求,研究分析氣動、電動元件特性,通過合理化的假設和三維模擬處理,設計動力底盤行走、基質集攏升運、容器自動抓取碼放、容器直立定位、基質精準裝填和容器擺放連續作業各個工位動作控制方案,完成硬件搭建和控制程序編寫,開發色塊苗軟薄容器基質裝填作業智能控制系統,通過樣機運行試驗,驗證軟薄容器基質裝填智能控制系統模型的精確性以及所采用控制策略的可靠性。
3.5 關鍵作業參數實時監測技術
機械化作業質量及效率是種植戶購買農機作業裝備最關心的指標,農機作業工況復雜,導致較多機型可靠性和穩定性不高,故障率相對較高,因此農機作業裝備關鍵作業參數實時監測技術被國內外學者廣泛關注,開發了系列相關系統,目前已廣泛應用于谷物收割機、花生收獲機等作業裝備。基質裝填過程中,核心工作部件作業情況無法實時顯示報警,操作者不能及時發現潛在故障,導致機器性能進一步惡化,直至機器無法使用。因此,針對色塊苗軟薄容器基質裝填需要,研究各關鍵作業部件作業參數在線檢測方法,設計色塊苗軟薄容器基質裝填作業在線監測裝置,實現對轉動軸扭矩、提升輸送量和容器姿態等自動監測;搭建CAN總線網絡,實現車載監測終端與各信號采集控制子單元之間的數據交互,實現參數顯示;采用Lab View軟件編程,實時采集、顯示及保存色塊苗軟薄容器基質裝填作業參數,并在故障工況下進行報警提示。
4 結語
色塊苗是城市綠色園林工程的重要組成元素之一,已成為鄉村振興的支柱產業之一,然而屬于勞動密集型的容器基質裝填環節仍采用人工作業,“用工慌”和勞動力成本高的矛盾日益突出,提高色塊苗生產裝備技術水平迫在眉睫。目前,色塊苗容器機械化裝填處于起步階段,在推廣應用過程中存在農機農藝匹配性差、復雜環境適應性差、軟薄容器分離性差和經濟效益提高不明顯等問題,在整機較小尺寸和成本可控限制范圍內對專用動力底盤、自動對壟技術、軟薄容器自動抓取碼放機構、軟薄容器基質裝填智能控制系統和關鍵作業參數實時監測技術等方面進行系統有針對性的改進提升,并集成應用到色塊苗軟薄容器基質裝填機上,能夠較好地解決色塊苗復雜作業工況機械化裝填難問題,對實現我國色塊苗全程機械化生產和促進色塊苗產業可持續發展具有重大意義。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
