基于物聯(lián)網(wǎng)技術(shù)的大跨度鋼桁架施工監(jiān)測
2024-01-03 01:05:26李上雄LIShangxiong
價值工程 2023年35期
關(guān)鍵詞:施工
李上雄LI Shang-xiong
(廣東建科創(chuàng)新技術(shù)研究院有限公司,中山 528451)
0 引言
大跨度鋼桁架的施工過程包括結(jié)構(gòu)拼裝階段、預(yù)應(yīng)力施加階段、卸載階段以及鋼桁架滑移階段。其中預(yù)應(yīng)力施加階段以及卸載階段的結(jié)構(gòu)主體應(yīng)力、變形變化幅度較大,往往是整個施工過程中安全風(fēng)險較大的環(huán)節(jié),也是結(jié)構(gòu)成型后能否達到設(shè)計要求的關(guān)鍵[1]。對于工程人員來說,理解和預(yù)測鋼桁架力學(xué)參數(shù)的數(shù)據(jù)突變現(xiàn)象對于確保結(jié)構(gòu)的安全性和可靠性具有重要意義。
針對目前大跨度鋼桁架施工監(jiān)測的需求,本文利用物聯(lián)網(wǎng)技術(shù)構(gòu)建了物聯(lián)結(jié)構(gòu)變形自動化監(jiān)測系統(tǒng),該系統(tǒng)可實時將傳感器的監(jiān)測數(shù)據(jù)通過物聯(lián)網(wǎng)設(shè)備匯聚至云服務(wù)器,并且數(shù)據(jù)清洗、數(shù)據(jù)計算以及數(shù)據(jù)的轉(zhuǎn)發(fā)服務(wù)均在云端實現(xiàn),減少了現(xiàn)場布設(shè)設(shè)備的數(shù)量。物聯(lián)網(wǎng)設(shè)備的使用有效地克服了傳統(tǒng)結(jié)構(gòu)變形自動化監(jiān)測系統(tǒng)的缺點,避免了大量電力線纜及信號線纜的敷設(shè),具有維護成本低、施工靈活度高的優(yōu)勢。
1 基于物聯(lián)網(wǎng)技術(shù)的結(jié)構(gòu)變形自動化監(jiān)測系統(tǒng)
物聯(lián)結(jié)構(gòu)變形自動化監(jiān)測系統(tǒng)基于物聯(lián)網(wǎng)架構(gòu)設(shè)計,主要由傳感器數(shù)據(jù)采集與轉(zhuǎn)發(fā)節(jié)點、數(shù)據(jù)中轉(zhuǎn)物聯(lián)基站、數(shù)據(jù)轉(zhuǎn)發(fā)中臺、結(jié)構(gòu)變形自動化監(jiān)測前端軟件組成。其中,物聯(lián)網(wǎng)設(shè)備在數(shù)據(jù)的采集及傳輸上扮演著重要的角色,也是本系統(tǒng)克服傳統(tǒng)自動化監(jiān)測方式缺點的關(guān)鍵。
1.1 傳感器數(shù)據(jù)采集與轉(zhuǎn)發(fā)節(jié)點
傳感器數(shù)據(jù)采集與轉(zhuǎn)發(fā)節(jié)點主要由傳感器與低功耗物聯(lián)模塊構(gòu)成,兩者可通過極短的線纜進行連接,如圖1所示。低功耗物聯(lián)模塊又分為低功耗物聯(lián)串口模塊[2]與低功耗物聯(lián)振弦模塊[3],可適配于市面上大多數(shù)使用RS485信號和振弦信號通訊的傳感器,并且模塊內(nèi)置的電池可通過穩(wěn)壓模塊和升壓模塊實現(xiàn)對傳感器的供電(電池壽命可達兩年以上)。針對監(jiān)測點位較為分散、現(xiàn)場環(huán)境雜亂的情況,可將低功耗物聯(lián)模塊當成單通道的數(shù)據(jù)采集與轉(zhuǎn)發(fā)設(shè)備使用,一臺傳感器搭配一臺低功耗物聯(lián)模塊進行工作,從而實現(xiàn)便捷的分布式數(shù)據(jù)獨立采集與轉(zhuǎn)發(fā)功能,數(shù)據(jù)轉(zhuǎn)發(fā)可通過模塊內(nèi)置的LoRa 裝置實現(xiàn)無線通訊,避免了線路集成等繁瑣工作步驟。

圖1 傳感器數(shù)據(jù)采集與轉(zhuǎn)發(fā)節(jié)點示例
1.2 數(shù)據(jù)中轉(zhuǎn)物聯(lián)基站
物聯(lián)基站通過LoRa 技術(shù)與低功耗物聯(lián)模塊進行無線通訊,包括接收來自物聯(lián)模塊的原始監(jiān)測數(shù)據(jù)與下發(fā)模塊工作指令。LoRa 通訊技術(shù)的優(yōu)勢[4]包括:①長距離傳輸,可在數(shù)公里范圍傳輸數(shù)據(jù),適用于大規(guī)模、分散的物聯(lián)網(wǎng)應(yīng)用;②低功耗,能夠以較低的能耗進行長距離通信,設(shè)備的電池壽命可達數(shù)年;③大容量,能夠同時連接成千上萬個節(jié)點,提供大容量數(shù)據(jù)傳輸服務(wù)。該通訊技術(shù)的優(yōu)勢使得一臺物聯(lián)基站即可覆蓋現(xiàn)場大量的、分散的傳感器數(shù)據(jù)采集與轉(zhuǎn)發(fā)節(jié)點。同時,物聯(lián)基站可通過4G 或5G 信號將原始監(jiān)測數(shù)據(jù)發(fā)送至云服務(wù)器,從而完成數(shù)據(jù)的中轉(zhuǎn)功能。
1.3 數(shù)據(jù)轉(zhuǎn)發(fā)中臺與前端軟件
數(shù)據(jù)轉(zhuǎn)發(fā)中臺是一種提供數(shù)據(jù)處理、傳輸和管理服務(wù)的平臺[4],其主要功能之一就是數(shù)據(jù)輸出,它可以將來自物聯(lián)基站的原始監(jiān)測數(shù)據(jù)進行處理,而后將處理完畢的數(shù)據(jù)以不同的格式發(fā)送給不同的前端軟件,如web 應(yīng)用程序、移動應(yīng)用程序或其他系統(tǒng)。通過這樣的方式,數(shù)據(jù)轉(zhuǎn)發(fā)中臺可以為不同的業(yè)務(wù)場景提供數(shù)據(jù)支持,能夠更好地利用和管理數(shù)據(jù)。
2 工程概況及測點布設(shè)方案
2.1 工程概況
某展館上部結(jié)構(gòu)為大跨度鋼桁架結(jié)構(gòu),其施工工序包括結(jié)構(gòu)拼裝、預(yù)應(yīng)力施加、卸載以及滑移四個階段。為保證結(jié)構(gòu)的穩(wěn)定性和安全性,鋼桁架上弦桿與下弦桿在拼裝與預(yù)應(yīng)力施加兩個施工階段設(shè)置了支撐胎架。在卸載階段,逐步拆除鋼桁架支撐構(gòu)件,而后將桁架滑移至預(yù)定位置。
鋼桁架跨徑為117m,在高空中進行拼裝,每3 榀鋼桁架組成1 個滑移體單元,共計8 個滑移單元。鋼桁架在施加預(yù)應(yīng)力以及卸載階段的受力狀態(tài)變化較大,是需要重點進行監(jiān)測的時段。其中,鋼桁架下弦桿為預(yù)應(yīng)力施加對象,而上弦桿和下弦桿同為卸載對象(拆除支撐構(gòu)件)。采用了物聯(lián)結(jié)構(gòu)變形自動化監(jiān)測系統(tǒng)對大跨度鋼桁架的應(yīng)變、撓度以及所處環(huán)境溫度進行了施工監(jiān)測。
2.2 測點布設(shè)方案
由于篇幅有限,僅選取1 個滑移體單元作為施工監(jiān)測案例進行分析,該單元由3 榀鋼桁架構(gòu)成。每榀鋼桁架各選取1 根上弦桿和1 根下弦桿作為應(yīng)變監(jiān)測對象,僅選取滑移單元中間榀鋼桁架的下弦桿作為撓度監(jiān)測對象,選取鋼桁架中央位置作為環(huán)境溫度監(jiān)測對象。本次監(jiān)測參數(shù)的采集頻率設(shè)置為10 分鐘/次,所有傳感器的安裝工作在鋼桁架高空拼裝完成后進行。(表1)

表1 某展館大跨度鋼桁架的滑移單元施工監(jiān)測測點匯總
2.2.1 應(yīng)變監(jiān)測
本文首先引入電機輸入電能與機器人機械能兩個能耗指標,將這兩個指標作為目標函數(shù)進行不同拾放軌跡的參數(shù)優(yōu)化仿真,并在樣機上進行了實驗驗證;然后通過不同的最優(yōu)參數(shù)軌跡的數(shù)據(jù)求出能耗值,得出具有Bang-bang速度分配方式的分段多項式曲線為最優(yōu)拾放軌跡;最后通過不同拾放點與不同軌跡周期試驗,展現(xiàn)出最優(yōu)軌跡具有空間與時間上的可重復(fù)性,對不同工業(yè)現(xiàn)場的高速拾放操作具有現(xiàn)實的指導(dǎo)意義。本文為機器人軌跡的能耗比較提供了可參考的方法。
為保證應(yīng)變長期監(jiān)測的準確性和穩(wěn)定性,鋼桁架應(yīng)變采用振弦式應(yīng)變計進行監(jiān)測。振弦式應(yīng)變計可安裝在鋼結(jié)構(gòu)及其他建筑物表面,用于測量結(jié)構(gòu)的應(yīng)變。
2.2.2 撓度監(jiān)測
鋼桁架撓度采用壓差式靜力水準傳感器系統(tǒng)進行測量。壓差式靜力水準儀利用連通管原理,經(jīng)過測量監(jiān)測點與基準點的液面高度,即可由公式計算監(jiān)測點相對于基準點的沉降數(shù)據(jù)。
2.2.3 環(huán)境溫度監(jiān)測
鋼桁架所處環(huán)境溫度采用環(huán)境溫濕度計進行測量。在設(shè)計階段,通常需要考慮鋼桁架在不同環(huán)境溫度下的變形以及受力情況,進而采取合理的構(gòu)造方式來控制結(jié)構(gòu)的應(yīng)變和撓度變化。在鋼桁架的施工階段,同樣需要考慮環(huán)境溫度的變化對結(jié)構(gòu)產(chǎn)生的影響,從而采取相應(yīng)的措施來保證結(jié)構(gòu)的安全性和可靠性。
3 結(jié)果與分析
鋼桁架高空拼裝完成后,進行了應(yīng)變計、靜力水準儀以及環(huán)境溫濕度計的安裝。根據(jù)2022 年2 月23 日至2022 年2 月27 日的監(jiān)測數(shù)據(jù),分別對鋼桁架預(yù)應(yīng)力施加前、預(yù)應(yīng)力施加完成后至卸載前、卸載完成后的三個監(jiān)測時段進行了數(shù)據(jù)的對比分析。
3.1 拼裝完成至預(yù)應(yīng)力施加前
3.1.1 應(yīng)變分析
在鋼桁架高空拼裝完成后至預(yù)應(yīng)力施加前的監(jiān)測時段,鋼桁架上弦桿應(yīng)變測點U1、U3(U2 已損壞)以及下弦桿應(yīng)變測點D1、D2、D3 的監(jiān)測數(shù)據(jù)保持以天為周期的規(guī)律性波動特征,基本與同一監(jiān)測時段的環(huán)境溫度監(jiān)測數(shù)據(jù)變化規(guī)律保持一致,如圖2 至圖4 所示。當環(huán)境溫度升高時,桁架桿件受熱膨脹,桿件的伸長導(dǎo)致應(yīng)變計受拉,其拉應(yīng)變同步增大。隨著溫度的下降,桿件發(fā)生回縮,拉應(yīng)變逐漸減小。如表2 所示,在本監(jiān)測時段,上弦桿測點U1、U3的應(yīng)變平均值分別為-47.44uε 與-52.23uε,下弦桿測點D1、D2、D3 的 應(yīng) 變 平 均 值 分 別 為5.00uε、-0.52uε 與17.72uε。

表2 不同監(jiān)測時段的桿件應(yīng)變及撓度平均值比較

圖2 鋼桁架下弦桿應(yīng)變時程曲線
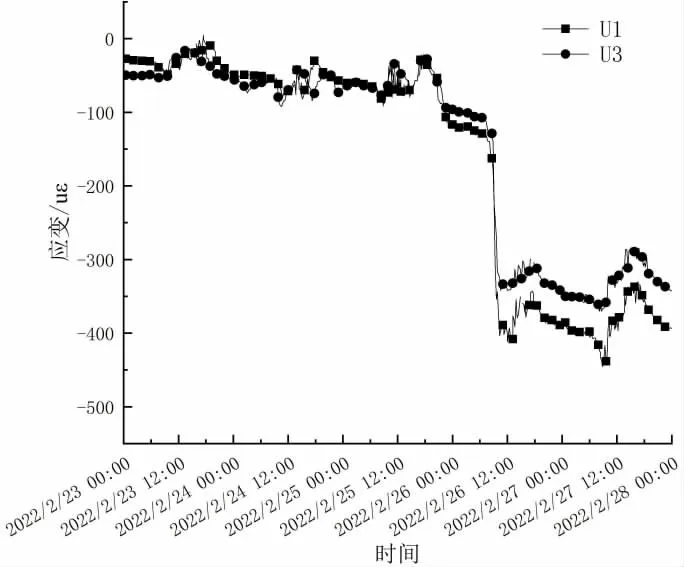
圖3 鋼桁架上弦桿應(yīng)變時程曲線
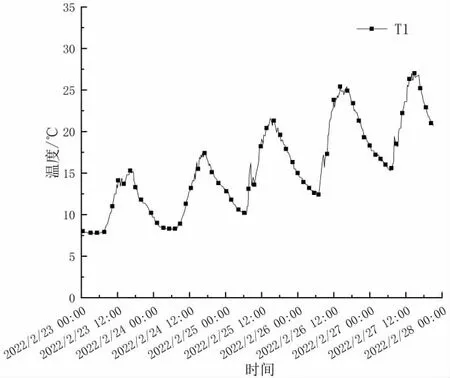
圖4 環(huán)境溫度時程曲線
3.1.2 撓度分析
在本監(jiān)測時段,鋼桁架下弦桿撓度監(jiān)測數(shù)據(jù)基本保持平穩(wěn),無明顯變化,如圖5 所示。如表2 所示,在本監(jiān)測時段,下弦桿撓度測點N1 的撓度平均值為0.04mm。
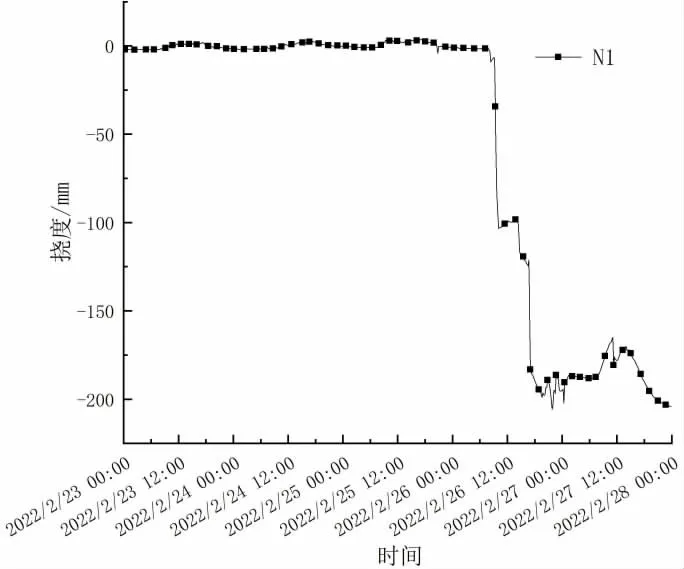
圖5 鋼桁架下弦桿撓度時程曲線
3.2 預(yù)應(yīng)力施加完成后至卸載前
3.2.1 應(yīng)變分析
預(yù)應(yīng)力施加的對象為鋼桁架下弦桿,預(yù)應(yīng)力施加的方式采用后張法。在鋼索逐級張拉的過程中,鋼桁架下弦桿應(yīng)變測點D1、D2、D3 的壓應(yīng)變顯著增大,表明此時鋼桁架下弦桿所承受的壓力增大。與預(yù)應(yīng)力施加前的應(yīng)變平均值相比,預(yù)應(yīng)力施加完成后下弦桿應(yīng)變測點D1、D2、D3 的壓應(yīng)變平均值分別為-219.51uε、-278.09uε、-242.91uε,分別增大了224.51uε、278.61uε、260.63uε。
3.2.2 撓度分析
與預(yù)應(yīng)力施加前相比,在本監(jiān)測時段,桁架下弦桿撓度監(jiān)測數(shù)據(jù)平均值為-1.17mm,并未發(fā)生明顯變化。
3.3 卸載完成后
3.3.1 應(yīng)變分析
在支撐構(gòu)件拆除的過程中(即卸載階段),鋼桁架所有應(yīng)變測點的監(jiān)測數(shù)據(jù)均發(fā)生明顯變化。卸載過程中,受桿件自身重力的影響,下弦桿拉應(yīng)變逐漸增大,最后抵消了在預(yù)應(yīng)力施加階段桿件產(chǎn)生的預(yù)壓應(yīng)變。上弦桿壓應(yīng)變在卸載過程中受自身重力影響顯著增大。如表2 所示,卸載完成后,下弦桿應(yīng)變測點D1、D2、D3 的拉應(yīng)變平均值分別為63.13、60.58、126.66,上弦桿應(yīng)變測點U1、U3 壓應(yīng)變平均值分別為-382.45、-330.23。
3.3.2 撓度分析
在卸載過程中,受自身重力影響,鋼桁架下弦桿的下?lián)铣潭戎饾u增大。卸載完成后,撓度監(jiān)測數(shù)據(jù)基本保持穩(wěn)定。如表2 所示,卸載完成后下弦桿撓度為-188.07mm。
由圖2、圖3 與圖5 可知,在2022 年2 月26 日12 時左右(卸載階段),下弦桿應(yīng)變值、上弦桿應(yīng)變值以及下弦桿撓度值均發(fā)生大幅度的突變,這種同步性突變現(xiàn)象表明在鋼桁架卸載過程中需充分考慮結(jié)構(gòu)的響應(yīng),以確保施工過程中結(jié)構(gòu)的安全性和可靠性。
4 結(jié)論
針對傳統(tǒng)監(jiān)測方式布線復(fù)雜、能耗較高以及施工過程中有線傳輸鏈路易損壞等缺陷,采用物聯(lián)網(wǎng)技術(shù)構(gòu)建了物聯(lián)結(jié)構(gòu)變形自動化監(jiān)測系統(tǒng),該系統(tǒng)可實時將傳感器的監(jiān)測數(shù)據(jù)通過物聯(lián)網(wǎng)設(shè)備無線匯聚至云服務(wù)器,數(shù)據(jù)清洗、數(shù)據(jù)計算以及數(shù)據(jù)的轉(zhuǎn)發(fā)服務(wù)均在云端實現(xiàn),有效地克服了傳統(tǒng)結(jié)構(gòu)變形自動化監(jiān)測系統(tǒng)的缺點,避免了大量電力線纜及信號線纜的敷設(shè),具有維護成本低、施工靈活度高、適用業(yè)務(wù)場景廣的優(yōu)勢。
采用物聯(lián)結(jié)構(gòu)變形自動化監(jiān)測系統(tǒng)對某展館大跨度鋼桁架的桿件應(yīng)變、撓度以及所處環(huán)境溫度進行了施工監(jiān)測,利用該監(jiān)測系統(tǒng)獲取的監(jiān)測數(shù)據(jù)能準確反映出不同施工階段鋼桁架的受力特征,為施工安全提供了保障。
猜你喜歡
建材發(fā)展導(dǎo)向(2022年18期)2022-09-22 07:13:20
建材發(fā)展導(dǎo)向(2022年12期)2022-08-19 02:33:10
建材發(fā)展導(dǎo)向(2022年10期)2022-07-28 03:04:36
建材發(fā)展導(dǎo)向(2021年22期)2022-01-18 06:12:46
建材發(fā)展導(dǎo)向(2021年19期)2021-12-06 03:20:50
建材發(fā)展導(dǎo)向(2021年18期)2021-11-05 09:19:50
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:58
建材發(fā)展導(dǎo)向(2021年9期)2021-07-16 07:11:36
上海建材(2017年4期)2017-10-16 01:33:34
中國房地產(chǎn)業(yè)(2016年2期)2016-03-01 01:25:48