基于深度視覺的GIS內部金屬微粒運動特性分析
2024-01-04 08:09:32劉寶林熊永平
山東電力技術 2023年12期
劉寶林,熊永平,李 杰,師 偉
(1.北京郵電大學計算機學院,北京 海淀 100876;2.國網山東省電力公司電力科學研究院,山東 濟南 250003)
0 引言
氣體絕緣變電站氣體絕緣金屬封閉開關設備(gas insulated substation,GIS)憑借輕量化、絕緣性能好等優點被廣泛使用,是電力系統運行中的重要設備。雖然GIS 發生故障的概率低于常規設備,但由于GIS 是全封閉組合設備,若出現事故,會造成更加嚴重的后果。一般情況下,GIS 在生產制造過程不良的加工工藝、搬運中的機械摩擦、開關動作等都可能產生自由金屬微粒。金屬微粒會對GIS 絕緣性能產生較大威脅,如當GIS 正在運行時,金屬微粒會在高壓的環境下產生感應電荷,由于電場力等作用力的影響,金屬微粒容易受力不均而產生不規則的運動,干擾GIS 設備的正常運行。因此,對金屬微粒進行檢測并研究其運動特性是非常重要的。
國內外開展大量有關GIS 內部異物的檢測識別研究,提出了許多檢測方案,尤其側重對GIS 內部的運動微粒運動行為進行研究。
Ahmed 等人[1]發現利用超聲傳感器對存在缺陷的GIS 進行檢測,判斷GIS 內部是否存在異物微粒,但該方法在執行過程中需要充分排除外界干擾和周密控制檢測點與間隔距離等。文獻[2]基于超聲波局部放電檢測脈沖模式下檢測能夠獲取具有飛行特征圖譜的思路,提出一種依據GIS 內自由導電微粒的飛行軌跡快速獲取微粒狀態信息的方法,該方法可提高導電微粒狀態信息的識別效率,但不同材質、不同尺寸的微粒飛行時間-高度圖譜不同,在實際應用中構建飛行時間-高度圖譜庫較為繁瑣。文獻[3]提出X 射線成像法是一種檢測GIS 設備內部缺陷的有效方法,并在缺乏成熟的參數選擇方法的前提下,為220 kV GIS 設備內異物缺陷檢測選擇合適的參數,對部分微粒能夠實現良好的檢測,對部分金屬微粒檢測效果較差,如鋁金屬微粒,需要借助其他手段進行輔助檢測。此外,該方法難以獲取金屬微粒的運動狀態信息。文獻[4]提出GIS 現場交接實驗中,現場耐壓實驗能夠有效地發現GIS 設備內部的絕緣污穢、損害和遺留異物等缺陷,并進行實驗,驗證超聲波法可行性及準確性,但超聲波法在不同的放電類型下,靈敏度存在較大差異,導致放電量范圍不易控制問題。
現有研究已經提出了多種可行的GIS 內部異物、微粒等檢測方案,且多數方案集中在如何使用超聲波、X 射線等方法,但這些檢測方式在實驗過程中容易被外界條件干擾。圖像處理本身具有便捷等優勢。近幾年,隨著計算機領域深度學習的迅速發展,基于深度學習的目標檢測取得較大進展,眾多具有代表性的物體檢測算法被提出并且被廣泛應用于工業、農業、醫學等領域,例如農業生產生活中的害蟲檢測,醫學領域中對病變區域的檢測,常見的視頻監控等[5]。這些目標檢測方法具有結構靈活、特征自動提取、檢測精度高、檢測速度快等優點[6]。此外,目標檢測方法通用性很強,可做各類目標的識別檢測[7],如在小目標檢測領域,已經取得顯著的成果[8]。因此考慮將基于深度學習的目標檢測方法引入GIS腔體內部的金屬微粒檢測。
搭建金屬微粒在GIS 腔體內部運動的模擬仿真實驗環境,但不再基于超聲波和X 射線等途徑進行金屬微粒檢測,而是采取視覺分析的方法,利用高速攝像機記錄金屬微粒運動全過程,使用基于卷積神經網絡的目標檢測和跟蹤算法,實現快且準的運動金屬微粒識別與跟蹤,有效掌握運動金屬微粒的運動軌跡、運動狀態等信息。基于獲取的數據,對金屬微粒運動特性進行研究分析。
1 圖像目標檢測與跟蹤模型
圖像目標檢測的基本任務是需要判別圖片中被檢測的目標類別,同時需要使用矩形邊界框來確立目標所在位置及大小,并給出相應的置信度。常用的目標檢測類型主要分為兩類,一類是基于區域的雙階段目標檢測算法,主要步驟是先產生目標候選框,然后做候選框的分類與回歸,以下為屬于該類的3 種方法:
1)用于精確物體定位和語義分割的豐富特征層次結構(rich feature hierarchies for accurate object detection and semantic segmentation,RFH),它首先通過選擇搜索提取一組候選區域,隨后使用預訓練的卷積神經網絡模型實現特征提取,最后通過支持向量機(support vector machine,SVM)完成目標預測[9];
2)用于視覺識別的深度卷積網絡空間金字塔池(spatial pyramid pooling in deep convolutional networks for visual recognition,SPP-Net),解決了RFH只能接受固定大小輸入的問題,SPP-Net 中使用空間金字塔池化層,用于生成統一尺寸的特征向量的輸出,只計算一次全圖特征,從而避免重復計算[10];
3)特征金字塔(feature pyramid network,FPN),把卷積運算后的多個尺度特征進行融合,使不同層次、尺度的特征都能充分發揮其所具有的信息,促進小目標的檢測[11]。
另一類是基于回歸分析的單階段目標檢測算法,與雙階段檢測算法不同的是,單階段算法從圖片輸入層到結果輸出層之間的隱藏層為只運行一次特征提取的深度神經網絡結構[12],憑借一個卷積神經網絡(convolutional neural networks,CNN)直接預測不同目標的類別與位置[13],以下為屬于該類的3 種性能較優的方法:
1)你只看一次(you only look once version 5,YOLOv5)模型,該方法首先調整輸入圖片大小,送入CNN 提取特征,然后處理網絡預測結果,實現端到端的目標檢測[14];
2)全卷積單階段目標檢測(fully convolutional one-stage object detection,FCOS)模型,基于逐像素預測的方式預測特征圖上每個空間位置的類別,并直接輸出目標的類別,具有檢測速度快,消除對錨框的依賴,避免調整錨框相關的超參數,減小訓練時的內存占用等優點[15];
3)飛槳-你只看一次的優化版(an evolved version of YOLO,PPYOLOE)模型采用無錨框機制、動態標簽分配算法等方法,性能上超越眾多檢測算法。
這3 種單階段檢測方法能夠有效提高檢測速度,在實時小目標檢測領域取得了不錯的檢測結果,尤其GIS 腔體內部環境較為簡單,理論上,用于金屬微粒檢測,可表現出優異的性能。
跟蹤可被定義為估計物體圍繞一個場景運動時在圖像平面中的軌跡,即一個跟蹤系統給同一個視頻中不同幀的跟蹤目標分配相一致的標簽[16]。目標跟蹤模型的任務是在給定視頻或圖像中的第一幀目標的位置和狀態之后,在同一視頻或圖像的后續幀中能夠識別,跟蹤目標的位置和狀態[17]。現有的跟蹤模型有GOTURN、FCNT、SiamRPN++等。
將利用深度學習進行圖像目標檢測與跟蹤的方法,應用于電網GIS 內部金屬微粒的檢測,具有不錯的實際效果。
2 金屬微粒運動模擬實驗和視頻采集
為更加細致地觀測GIS 內部運動金屬微粒的運動過程并分析其運動特性,根據GIS 實際運行工況,同時考慮實驗的可操作性和觀測性,建立真實且比例合理的模擬仿真模型,通過調節外施電壓,進而對金屬微粒施加電場力,使金屬微粒在腔體內部做跳躍運動,并用高速攝像機記錄運動過程,為后續對GIS 腔體內部的金屬微粒進行檢測和金屬微粒運動特性分析提供數據需求。
2.1 實驗環境
實驗中使用的金屬的長度為10 mm,半徑為0.15 mm;透明腔體內徑為60 mm,厚度為10 mm,長度為450 mm,裝置實物如圖1 所示。
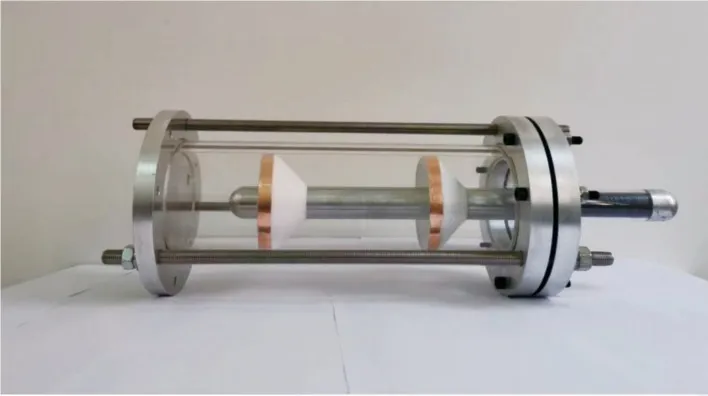
圖1 透明腔體裝置實物Fig.1 Transparent cavity device physical
搭建環境過程主要按照以下步驟進行:
1)對金屬微粒噴灑酒精,然后用清潔布擦拭干凈并靜置;
2)等晾干后,將金屬微粒放入透明腔體底部,位置處于兩個絕緣子中間;
3)將帶有絕緣子的導桿插到腔體中,安裝金屬蓋板,使腔體氣密性良好;
4)用真空泵將腔體抽至真空后,向腔體中充入實驗壓強的SF6,利用泄漏檢測儀進行檢測,驗證腔體密封性好,確保漏氣率滿足要求,以確保壓強穩定;
5)連接實驗電路,接通高速攝像機,預覽攝像機視野,使兩個盆式絕緣子之間的位置占滿高速攝像機的視野;
6)靜置裝置,使SF6在裝置中分布均勻。
2.2 視頻采集
視頻采集過程主要按照以下步驟進行:
1)在搭建好的平臺環境中,接通電源,緩慢旋動高壓電源調壓旋鈕,升高電壓,旋轉到30 kV 左右,以確保該電壓條件可模擬GIS 設備正常運行狀態下的金屬微粒運動,然后開始錄制視頻,同時計時器記錄運動時間,觀察金屬微粒的狀態;
2)金屬微粒跳動起來后停止加壓;
3)觀察金屬微粒的運動狀態,記錄金屬微粒的起跳電壓,起跳時間,錄制時長,運動結果;
4)實驗結束后,旋轉按鈕降低電源電壓直到為零,關閉電源,對裝置進行放電。
模擬實驗結束后,使用高速攝像機采集的視頻幀率為200 Hz,視頻時長為69.5 min,分辨率為640×480。視頻中,前20 min 跳躍金屬微粒的數目較少,金屬微粒出現時間主要集中在后40 min 內,并且視頻中金屬微粒的運動狀態自然合理,每一幀中出現的金屬微粒數目一般為1~2 個,模擬實驗的視頻記錄效果如圖2(圖片經過二次處理,紅色矩形框內為金屬微粒)所示。
3 基于深度學習的運動金屬微粒檢測和跟蹤
選用基于深度學習的目標檢測與跟蹤的方法實現該場景的金屬微粒檢測,以達到更加高效且便捷檢測GIS 內部運動金屬微粒的效果,主要流程如圖3所示。
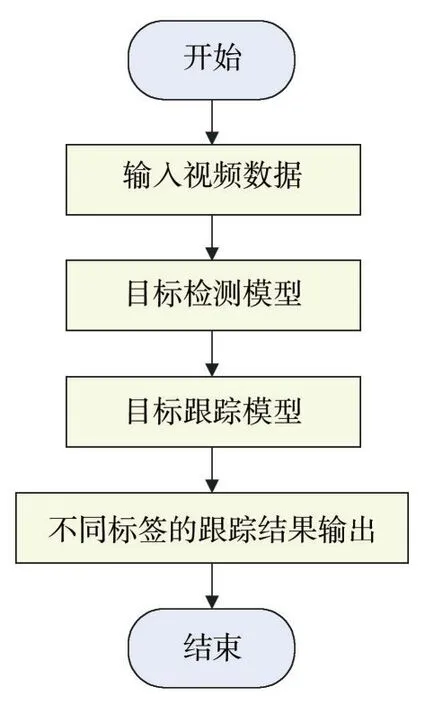
圖3 基于深度學習的檢測方法流程Fig.3 Flow chart of detection methods based on deep learning
1)輸入視頻數據。獲取運動金屬微粒的視頻數據,即在模擬金屬微粒運動的實驗中,使用高速攝像機記錄GIS 腔體內部的金屬微粒運動的全過程。
2)目標檢測模型。目標檢測模型進行特征提取等一系列操作,然后目標檢測模型將會輸出多個目標檢測框,這些檢測框在圖像中的區域即存在目標檢測對象。
3)目標跟蹤模型。跟蹤模型會把視頻的每一幀中同一個目標打上相同的標簽,如此操作即可完成目標跟蹤。
在該具體場景中,圖4 是記錄模擬實驗的視頻中帶有運動金屬微粒的畫面截圖,按照上述提出的使用深度學習方法,準備使用基于卷積神經網絡的目標檢測模型,先進行檢測運動金屬微粒,然后利用目標跟蹤模型跟蹤運動金屬微粒,獲得金屬微粒的運動狀態信息并進行后續的數據分析。

圖4 帶有運動金屬微粒的畫面截圖Fig.4 Screen grab with moving metal particles
3.1 金屬微粒目標檢測
由于金屬微粒較小,需要進行小目標檢測,準備使用3種目標檢測模型,YOLOv5、PPYOLOE 和FCOS 模型。
YOLOv5 是一種單階段目標檢測模型,該模型整個網絡結構分為4 個主要部分:輸入端、主干網絡、特征融合網絡、預測。
YOLOv5 輸入端采用數據增強,通過隨機縮放、隨機裁剪、隨機排布等多種方式將圖片進行隨機拼接,對于小目標的檢測有不錯的效果。此外,YOLOv5 模型會根據自定義數據自動調整錨框的邊界框大小,即自適應錨框,同時運用自適應圖片縮放,這些操作可以提高精度。
YOLOv5 的主干網絡由3 個結構組成,分別是Focus 結構、跨級部分網絡(cross stage paritial,CSP)結構和空間金字塔池化(spatial pyramid pooling,SPP)結構。Focus 是YOLOv5 中新提出的一種結構,主要對不同的圖片進行不同的切片操作。YOLOv5 中設計的兩種CSP 結構,如在YOLOv5s 網絡中,具有殘差結構的CSP1_X 結構應用于主干網絡以解決梯度問題,另一種CSP2_X 結構則應用于特征融合網絡中。SPP 結構即所謂的空間向量金字塔池化,可實現多尺度特征的融合,減少特征丟失問題。
YOLOv5 的特征融合網絡采用特征金字塔(feature pyramid network,FPN)+路徑聚合網絡(path aggregation network,PAN)的結構以提高網絡特征融合能力[18]。FPN 采用自頂向下的方式,將高層的特征以上采樣的方式向低層進行傳遞融合,增強多尺度表達能力,而PAN 則以自底向上方式把低層定位信息傳到高層,增強多尺度定位能力。
YOLOv5 的輸出端包含3 部分,分別是損失函數、非極大值抑制與檢測框。GIOU_Loss 函數作為邊界框的損失函數,可以使模型更快收斂、性能更好;同時利用非極大值抑制來處理多個預測框的情況,只保留所需要的最佳預測框。這兩者的集合可以更好地識別圖像中有重疊的目標。
PPYOLOE 模型的網絡架構與YOLOv5 類似,同樣由輸入端、主干網絡、特征融合網絡和頭部網絡4個部分組成。
PPYOLOE 的主干網絡包括RepVGG 模塊、非線性激活函數、有效的擠壓和激勵網絡(effective squeeze-and-excitation networks,Effective SE Atten tion)模塊、CSP 結構和SPP 結構等。其中RepVGG模塊是對VGG 模塊的改進;SE Attention 模塊是CNN 架構中采用的一種代表性的通道注意方法,用于對特征圖通道之間的相互依賴性進行建模,以增強表示能力,而Effective SE Attention 模塊是對SE Attention 模塊的改進,提高了性能[19]。
PPYOLOE 的特征融合網絡是FPN+PAN 結構,與YOLOv5 的特征融合網絡結構一致,功能一致。
PPYOLOE 的頭部網絡部分,是任務對齊頭部,經過該頭部網絡得到分類的概率與定位預測結果。
FCOS 模型對多尺度、多形態目標檢測具有很好的魯棒性,是一種基于無錨框的單階段算法,它的網絡架構由3 部分組成,分別是主干網絡、FPN 和輸出部分頭部網絡。
主干網絡部分的作用為從輸入的圖像數據中輸出不同層次的特征圖,然后將輸出的特征圖輸入特征金字塔網絡中。
在特征金字塔網絡中,進行上采樣,實現圖像特征融合,產生不同大小的特征圖,該過程可以保證微小目標在高層特征中有較強的語義信息。最后將不同大小的特征圖中每個像素都送入檢測頭[20]。
在頭部檢測網絡中,采用分層預測檢測目標的類別和位置坐標。
在上述介紹的3 個目標檢測模型中,為選擇一個綜合性能好檢測模型,特別進行了對比實驗,這些檢測模型分別對同一個視頻數據集進行目標檢測。在檢測速度與檢測精度的衡量下,實驗相關設置如下:
YOLOv5 模型,使用YOLOv5 中的YOLOv5x 模型的權重文件yolov5x.pt 和配置文件yolov5x.yaml 進行實驗;PPYOLOE 模型,使用基于PP-YOLOE 的小目標檢測場景模型的配置和權重文件進行實驗;FCOS 模型,使用FCOS_imprv_dcnv2_R_50_FPN_1x模型的配置與權重文件進行實驗。
上述模型及實驗文件可在github 上獲取。
可以看到這3 個檢測模型的檢測性能對比情況如表1 所示。在本實驗中,采用均值平均精度(mean average precision,mAP)對模型進行性能評估,表1 中mAP@0.5 為交并比(intersection over union,IOU)閾值設為0.5 時的mAP 值,mAP@.5:.95 為IOU 閾值從0.5 到0.95,步長0.05 的平均mAP 值,IOU 值越大,表明預測框與真實框的重合度越高,檢測效果越精準。相關計算如式(1)—式(3)所示。
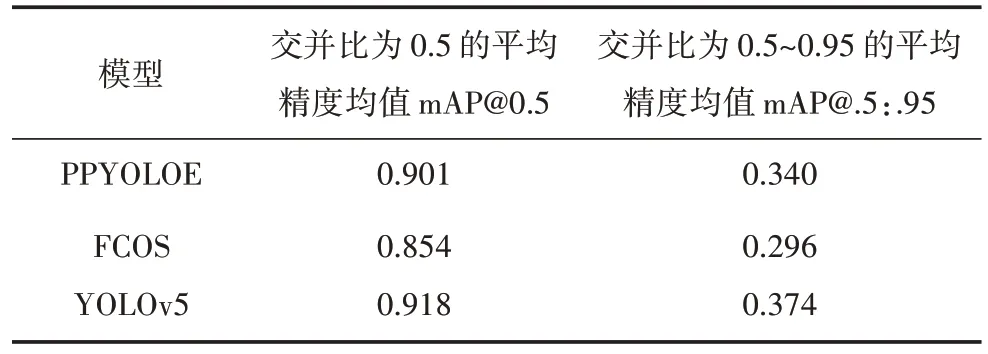
表1 3個模型檢測性能對比情況Table 1 Comparison of the performance of the three models
精確率為計算在預測的樣本中,預測為正樣本的正確率。計算方法為
式中:PT表示實例為正類,預測為正類;PF表示實例為負類,預測為正類。
召回率用來判斷所有要檢測的對象是否都能檢測到。計算方法為
式中:FN表示實例是正類,預測為負類。
多個類別物體檢測中,每一個類別可根據精確度和召回率制作一條曲線,AP表示該曲線下的面積,即每類微粒的識別精度,PmA表示多個類別AP的平均值,其值越高,表明模型檢測效果越好。平均精度均值計算方法為
式中:N為金屬微粒種類數量,此實驗中N取值為1。
綜合3 個模型在各指標上的表現,訓練后的YOLOv5 檢測平均精度均值最高,并且實驗中金屬微粒檢測的精確率最高可以達到0.95,因此使用YOLOv5 模型作為最終的目標檢測模型。
3.2 運動目標跟蹤
多目標追蹤算法DeepSort 已經被廣泛應用于目標追蹤任務中,能夠有效改善短時間的遮擋問題,提升跟蹤精度。因此使用該算法模型進行目標跟蹤,算法的主要流程如下。
1)對每一幀,根據卡爾曼濾波進行軌跡預測。
2)將預測的軌跡與實時檢測框進行級聯匹配,從而得到3 類結果:未匹配的跟蹤框(預測框)、未匹配的檢測框、級聯匹配成功的跟蹤框(預測框)與檢測框。
3)對于步驟2)中未匹配成功的跟蹤框與檢測框再次進行IOU 匹配。對于IOU 匹配中,將匹配不成功的檢測框作為新的跟蹤目標,進入卡爾曼濾波下一步的跟蹤預測。將匹配不成功的跟蹤框(預測框)按照確認狀態與未確認的狀態進行不同處理,對未確認狀態的跟蹤框(預測框)進行刪除操作,對確認狀態的跟蹤框(預測框),判斷連續未匹配的次數是否大于設定的最大跟丟數,若連續未匹配的次數大于最大跟丟數,則刪除該跟蹤框(預測框);若連續未匹配的次數小于最大跟丟數,則將其保留在跟蹤鏈中。
4)將步驟2)與步驟3)中匹配成功的預測框與檢測框,用來更新卡爾曼濾波中的相關參數,使跟蹤效果不斷進行改善,并輸出每一幀修正后的檢測框。
基于YOLOv5 的檢測效果,如圖5 所示。經過實驗驗證,DeepSort 跟蹤模型在該模擬場景中有較好的跟蹤效果,效果如圖6 所示。

圖5 YOLOv5檢測效果Fig.5 YOLOv5 test effect drawing
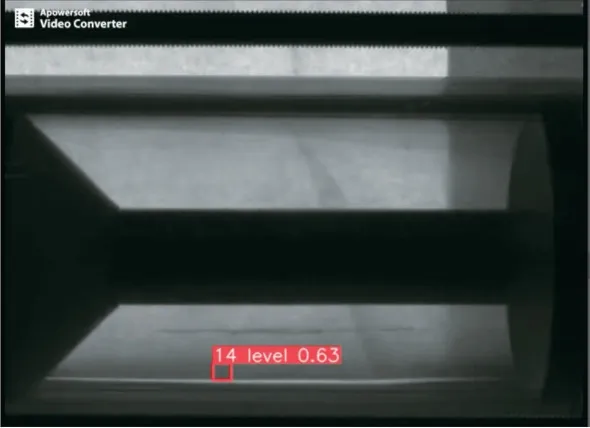
圖6 DeepSort跟蹤效果Fig.6 DeepSort tracks the renderings
4 運動特性分析
4.1 運動位置分析
通過修改跟蹤模型,保存每一幀中不同標識(identity document,ID)檢測框的坐標等數據,記錄為(幀序號,目標ID,x坐標,y坐標)。在跟蹤結束后,導出跟蹤的數據結果并進行分析。
通過記錄的運動數據,繪制出每個金屬微粒的運動軌跡圖,不同的顏色代表不同的金屬微粒,如圖7 所示。
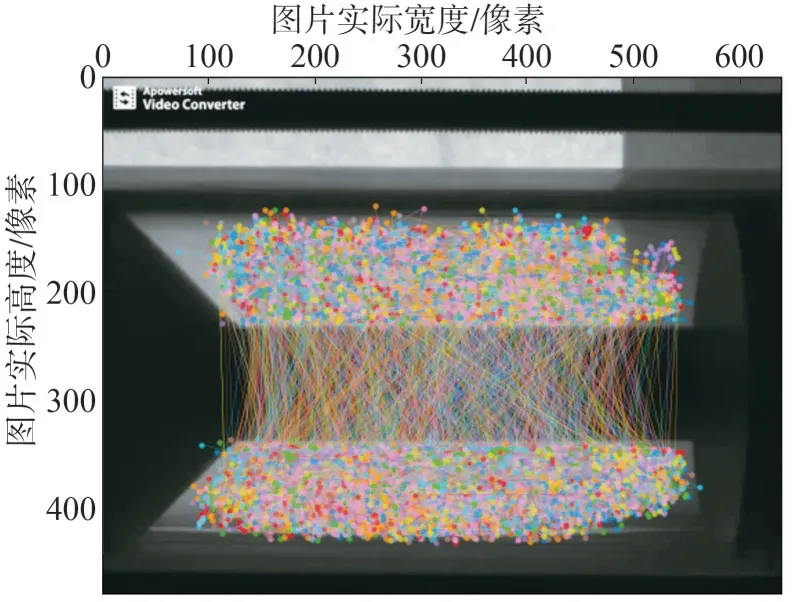
圖7 金屬微粒運動軌跡Fig.7 Trajectories of metal particles
部分金屬微粒在跟蹤時,出現了ID 切換,導致部分軌跡出現了類似跳躍的現象,但所占比例較小,整體上影響小。從圖7 中可以看出,金屬微粒的軌跡遍布腔體內部的絕大部分區域,運動軌跡幾乎沒有規律可言。
在獲得運動軌跡的基礎上,可以得到GIS 腔體內部的運動金屬微粒所經過的運動區域的具體分布情況,根據出現的頻次做出熱力圖,其中像素點紅色越深,代表該位置出現的頻次越高,紅色越淺,代表該位置出現的頻次越低,如圖8 所示。
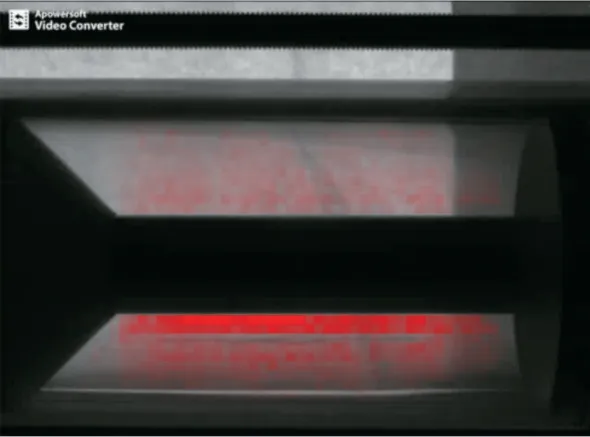
圖8 金屬微粒出現頻次分布熱力圖Fig.8 Occurrence frequency distribution heat map of metal particles
根據圖8 可知,所給視頻中的金屬微粒的運動軌跡分布較為分散,但相比于GIS 腔體的上部分區域的金屬微粒出現頻次,多數金屬微粒出現的地方集中在視頻中GIS 腔體內部的下方區域,并且金屬微粒在下方區域靠近GIS 腔體中間導桿的位置出現頻次,相較于其他區域最高。
總體上,就金屬微粒的出現位置而言,GIS 腔體內部的金屬微粒在電壓的作用下,運動范圍較廣,幾乎遍布兩個絕緣子之間的全部腔體空間,并且GIS腔體下方區域出現的頻次較高,靠近導桿的位置金屬微粒的出現頻次最高。
4.2 運動速度獲取與分析
在獲取數據的基礎上,為進一步分析金屬微粒的運動狀態,從速度方面進行分析。設計的速度計算方式為根據前后幀中同一ID 金屬微粒的中心坐標(x1,y1),(x2,y2),計算出兩個位置的歐氏距離d,然后根據間隔的幀數乘以每幀的時間獲得運動總時間t,最終計算出前后兩個位置的平均速度v,即
式中:c為間隔的幀數;f為幀頻率;t為運動總時間。
為便于計算,考慮金屬微粒運動幅度較小,即相鄰幀之間同一目標的位移較小,將計算得到的速度v視為兩坐標點中后抵達的坐標點所在位置的速度大小。
在處理數據分布時,發現超過每秒100 個像素的速度值占比僅0.001 2。為了顯示一般規律,得到的速度大小直方圖如圖9 所示。
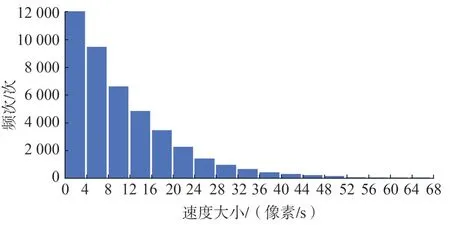
圖9 速度大小分布直方圖Fig.9 Velocity size distribution histogram
根據直方圖的展示結果可知,速度大小主要集中在每秒0~12 個像素距離之間,而超過2/3 的位置,金屬微粒速度大小不超過20 個像素距離。
總體上,運動金屬微粒的速度較小且數值比較集中。
4.3 運動位置與運動速度的相關系數分析
為進一步挖掘金屬微粒所經過的位置與速度大小之間的關系,使用皮爾遜相關系數進行兩者的關系分析。相關公式為
式中:r為兩個變量p和v之間的線性相關程度,r取值為-1~+1;本實驗中p為金屬微粒的位置信息p=p1,p2,...,pn;v為金屬微粒速度大小,v=v1,v2,...,vn;pˉ和vˉ取值分別為;n為樣本數量,即位置(坐標點)數量。
在假設檢驗中,通常使用皮爾遜相關系數來計算檢驗統計量,并根據該統計量的抽樣分布,計算得到P值,用于衡量相關系數的顯著性。P值計算步驟如下:
1)計算檢驗統計量T如式(6)所示。
2)確定顯著性水平α(通常為0.05)和自由度(通常為n-2),其中顯著性水平指在進行假設檢驗時,所選取的判斷標準;自由度表示樣本的自由信息量。
3)利用數學中t分布表,查找臨界值tcrit,使得在確定的自由度和顯著性水平條件下,滿足式(7)。
4)計算得到P值,判斷假設是否成立。如果P值小于顯著性水平α,則可以拒絕原假設,即認為兩個變量之間存在線性關系,并且P值越小,表明所對應相關系數越顯著;如果P值大于顯著性水平α,則不能拒絕原假設,即認為兩個變量之間不存在線性關系。
在分析前,為使分析結果更加貼近真實區域的具體特性,先將金屬微粒經過的全部位置使用kmeans 的方法進行聚類,將整個腔體內部區域聚類成不同的小區域,本次實驗中聚類的數量為12,金屬微粒位置聚類結果如圖10 所示,然后每一個區域內進行相關系數的分析,得到表2 的分析結果。
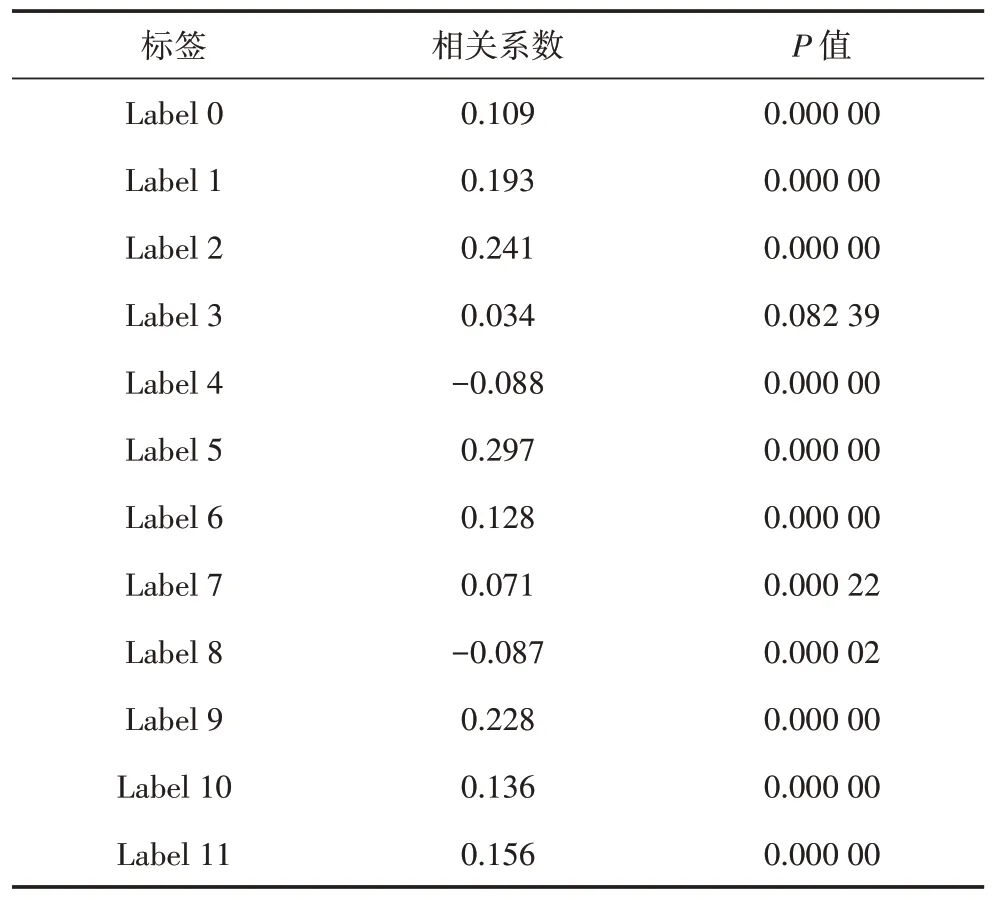
表2 相關系數分析結果Table 2 Correlation coefficient analysis results
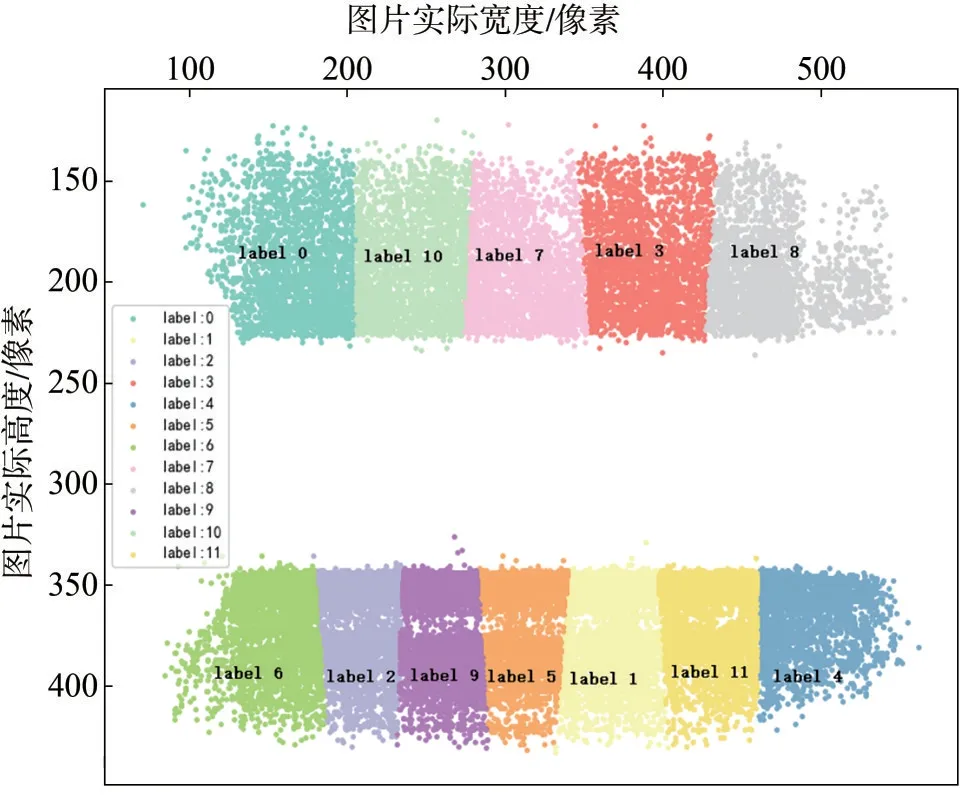
圖10 金屬微粒位置聚類結果Fig.10 Location clustering results of metal particles
從分析結果表中看出,Label 0、Label 1、Label 2、Label 4、Label 5、Label 6、Label 9、Label 10、Label 11腔體區域的金屬所經過的位置與速度大小相關性的顯著性水平P值為0,說明位置與速度這兩個變量不存在相關性的概率很小。從相關性強弱的角度進行分析,相比于腔體內其他區域,Label 2、Label 5 和Label 9 所標注的位置與速度存在較強的相關性。結合已繪制的熱力圖等信息可知,Label 2、Label 5、Label 9 所在的腔體區域也是金屬微粒出現頻次極高的區域,說明在金屬微粒經常出現的這些區域,位置和速度的相關性更強。
總之,從位置與速度大小的關系而言,不同的區域的位置與速度大小之間存在不同程度大小的相關性。對于該視頻數據集,一般情況下,在出現頻次較高的區域中,位置與速度大小的相關性較強;出現頻次較低的區域,位置與速度大小的相關性較弱。
5 結論
基于目前使用計算機視覺進行檢測與分析的方法已經廣泛應用于工業領域,因為其直觀、便捷的優勢,大大提高檢測效率。因此,對GIS 內部金屬微粒的運動特性進行研究分析,通過模擬實驗,借助于視覺分析的方法進行內部運動金屬微粒檢測并跟蹤分析,可以得到以下結論:
1)在電網GIS 內部運動金屬微粒的檢測與跟蹤方面,由于YOLOv5 在目標檢測上有更好的靈活性和更快的速度,DeepSort 在目標跟蹤過程中可以改善有遮擋情況下的目標追蹤效果,YOLOv5 和DeepSort 進行結合的方法較有效果,并且在測試結果中得到了驗證。該方法對GIS 內部運動金屬微粒檢測提供一種更好、更簡便的檢測手段,可以及時發現GIS 內部運動金屬微粒,為減少運動金屬微粒導致的破壞,具有良好的實際應用價值。
2)GIS 內部的運動金屬微粒是導致GIS 設備故障的一個主要原因,有必要使用更好的檢測手段進行檢測。
3)GIS 內部的運動金屬微粒的速度總體上較小,而運動軌跡涉及范圍較廣,幾乎遍及腔體的全部區域。
4)GIS 內部的金屬微粒經過的位置與速度大小在腔體的不同區域存在不同程度的相關性,其中金屬微粒在腔體的下方靠近導桿的中心區域出現的頻次最高,并且該處位置與速度有最大的相關性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產業(2016年3期)2016-05-17 04:32:12