復雜環境的無人機自主感知與避障技術綜述
2024-01-07 14:05:55李瑜強吳鎮平宋平
無人機 2023年7期
李瑜強 吳鎮平 宋平
與有人機相比,無人機在成本低、隱蔽性好以及無人員傷亡等特點,在軍事、工業、農業等領域取得廣泛應用。隨著無人機技術的快速發展,無人機應用環境日趨復雜,國內外研究者也開展了廣泛研究從而提高無人機智能化水平。傳感器技術、微電子技術、人工智能技術的快速發展也為無人機智能化奠定了基礎。
根據美國空軍研究實驗室(AFRL)對無人機自動控制水平(Autonomous Control Level,ACL)的劃分,無人機自動控制水平可劃分為ACL1~ACL10十個等級,“全球鷹”“捕食者”等自動控制等級較低的無人機需依靠操縱人員進行操縱或通過預編程控制無人機執行規定任務,其存在以下缺點:對操縱人員水平有較高要求,需要花費大量時間、經費進行操縱人員培訓;為實現操縱控制,需保證信號的實時回傳,因此可能由于敵方干擾導致無人機失控墜毀;基于預編程的無人機無法處理未知障礙物等突發情況,無法應用于陌生環境的飛行任務。
因此,進一步提高無人機自動控制水平,使其具備具有未知障礙物的陌生復雜環境自主飛行能力具有重要意義。為實現無人機在復雜環境的自主飛行,需要實現感知和規劃兩個任務。感知任務是指無人機基于機載傳感器定位自身位置并且建立環境障礙物地圖,規劃是指基于建立的地圖規劃從起始到目標點的規避障礙物的安全路徑。無人機實現環境感知并規劃安全路徑后,無人機便可利用控制算法控制無人機沿著規劃路徑規避障礙物安全飛行至目標點從而完成飛行任務。
無人機感知和規劃算法已經成為無人機技術的熱點研究方向并且在同時定位與建圖、稠密建圖、運動規劃等領域取得重要進展。本文對無人機自主感知和避障技術進行綜述,介紹了無人機自主感知與避障常用傳感器以及關鍵技術,并對未來發展方向進行展望。
無人機感知傳感器
無人機為實現環境感知,需要利用機載傳感器探測障礙物,并融合多幀探測結果建立環境地圖。常用的無人機感知傳感器包括激光雷達、視覺傳感器以及毫米波雷達等。
激光雷達
激光雷達發射激光束然后接收目標回波,通過將目標回波與發射激光束進行對比獲得障礙物的相對位置、速度等數據。激光雷達具有以下優點:發射激光波長較短因此探測精度較高,距離分辨率可達0.1m;探測距離較遠,商用激光雷達探測距離可達100-400m;相較于可見光相機受光照條件影響較小,可全天候工作;相較于毫米波雷達,抗電磁干擾能力較強。由于上述優點,激光雷達被廣泛應用于無人機、自動駕駛汽車、工業機器人的環境感知任務。但其存在易受灰塵、雨霧等氣候影響、質量相對較大并且價格昂貴等缺點。
雙目相機
雙目相機同步采集左右相機的圖像,并通過計算圖像間的視差并利用公式估計每個像素的深度,式中b為左右攝像頭的距離,d為左右圖像的視差。雙目相機體積小、質量輕、價格便宜,因此被廣泛應用于小型無人機以及其他小型移動機器人。雙目相機測量精度較低,并且由于其基線長度較短,測量距離較短通常為5-10m,同時其受光照條件影響較大,無法全天候工作。
毫米波雷達
毫米波雷達通過天線發送并接受高頻電路產生的電磁波信號,然后計算收發時間差計算目標位置、速度等參數。與激光雷達以及雙目相機相比,毫米波雷達探測距離遠,能夠達到1-2km。毫米波雷達發送的電磁波波長較長,對霧氣、煙塵等穿透性較好,因此環境適應性較好。但其探測精度較低,并且易受到其他無線電信號影響因而易被干擾。
關鍵技術
為實現無人機自主運動,需要實現以下關鍵技術:同時定位與建圖技術,基于機載傳感器實現無人機的準確定位;實時稠密建圖技術,建立可以表征環境障礙物信息的高精度稠密地圖;高實時性的路徑規劃技術,基于構建的稠密地圖快速規劃從起始點到目標點的安全可行的路徑,并且平穩有效執行。
同時定位與建圖技術
無人機的定位是實現稠密建圖以及避障飛行的基礎。全球定位系統被廣泛應用于無人機定位任務,但對于室內以及其他存在GPS信號遮擋的GPS拒止環境,需要借助同時建圖與定位(SLAM)技術,利用環境信息進行自主定位。
SLAM技術最早在1980年左右提出,初期的SLAM系統利用單線激光雷達作為前端傳感器,基于特征點匹配實現機器人定位,由于采用單線激光雷達,因此系統僅能夠提供二維的機器人位置以及姿態信息。隨著激光雷達技術的快速發展,3D激光雷達日趨成熟并被廣泛應用,性能優異的3D激光雷達能夠實現誤差在厘米級別的準確障礙物距離估計,研究者們基于其提出了成熟的3D激光SLAM系統,實現了三位環境中的準確、高魯棒性的定位。但由于激光雷達的固有特性,激光雷達SLAM框架仍存在以下缺陷:3D激光雷達數據量大,需要大量的計算資源;對隧道、走廊等特征點較少場景,會出現數據幀無法匹配導致定位失效;高速移動會導致點云畸變,降低定位精度。
視覺SLAM技術利用視覺傳感器實現位置和姿態估計。視覺SLAM系統提取不同幀畫面的特征點,然后通過特征點匹配并且最小化重投影誤差估計兩幀間的位置和姿態變化,最后利用多幀信息構建并求解優化問題獲得無人機位姿。與激光雷達SLAM系統相比,視覺SLAM系統具有質量小、成本低等優勢,但其依賴于圖像中的特征點,因此對于白墻等特征點稀疏場景容易導致視覺SLAM系統的狀態估計失效,并且特征點的提取與匹配對計算資源要求較高,最后基于單目相機構建的視覺SLAM系統還存在尺度不確定性問題。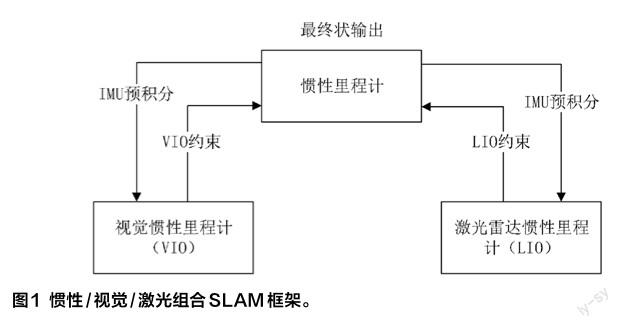
為解決激光雷達以及視覺SLAM算法存在的問題,并且進一步提高算法的準確性和魯棒性,研究者們提出了多傳感器融合算法,激光雷達、視覺傳感器和慣性測量單元(Inertial Measurement Unit,IMU)是三種經典的傳感器,可通過傳感器融合實現優缺點互補實現高于單個傳感器的SLAM系統。IMU能夠測量三軸加速度和三軸角速度信息,其不受環境影響并且能夠適應于快速運動場景,但其測量噪聲較大,僅基于IMU數據進行積分解算位姿會由于累計差而快速發散,因此研究者們將IMU與激光雷達以及視覺傳感器進行融合,解決激光雷達點云畸變以及單目相機的尺度不確定問題。常用的融合框架如圖1所示,激光雷達與IMU進行融合的SLAM系統被稱為激光-慣性里程計(Lidar-Inertial Odometry,LIO)系統,視覺傳感器與IMU進行融合的SLAM系統被成為視覺-慣性里程計(VisualInertial Odometry,VIO)系統,部分算法將激光雷達、視覺傳感器、IMU進行融合,實現了更高精度的定位效果但也提高了計算復雜度。
實時稠密建圖技術
環境描述是機器人自主巡檢的一個重要問題,其內容是在已知自身定位的情況下,借助傳感器采集環境深度信息,構建表征機器人所在環境的地圖。創建地圖作為路徑規劃的基礎。一般來說,有拓撲圖和度量圖兩種環境描述方法。
環境描述是實現無人機自主飛行的一個重要問題,它需要解決的問題是在已知自身位置和姿態的情況下,利用傳感器估計環境障礙物深度,構建表征環境障礙物的稠密地圖。無人機常用的稠密地圖形式包括稠密點云地圖、占用柵格地圖以及歐幾里得距離場地圖(ESDF)地圖,如圖2所示。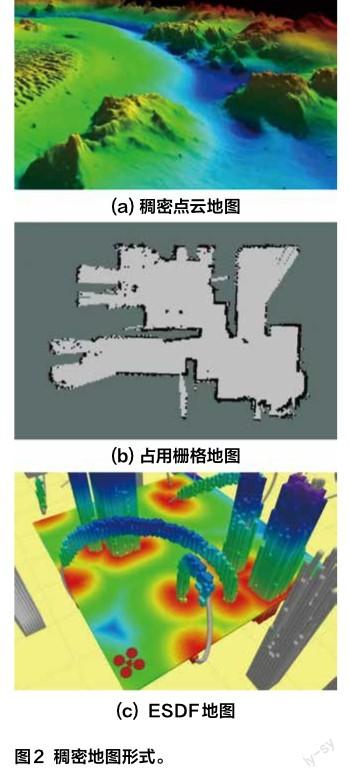
基于激光雷達以及視覺傳感器能夠測量障礙物距離傳感器距離,從而獲得障礙物點云。稠密點云地圖建圖算法通過融合多幀數據,利用稠密點云實現環境中的障礙物的重建。與占用柵格地圖以及ESDF地圖相比,稠密點云地圖對障礙物的表示更為直觀并且數據量相對較小,但其僅能表征障礙物表面信息而無法表征空閑區域以為未探索區域,因此無法直接用于避障任務。
占用柵格地圖是一種經典的環境表示方式,其將空間劃分為均勻網格單元,并且為單元賦值為不同數值來表示占用、空閑或未知等狀態,實現環境的障礙物表示。占用柵格地圖能夠有效表示環境不同狀態信息,因此可以方便得利用各種經典的路徑搜索算法搜索從當前點到目標點的安全路徑。但占用柵格地圖存在兩個問題,首先是其需要消耗較大的內存空間,當環境范圍較大時,將消耗大量的內存資源。另外,部分基于優化的路徑規劃算法需要獲得軌跡點距離最近障礙物距離的梯度信息,基于占用柵格地圖計算該梯度信息將會十分耗時。
為解決軌跡點距離最近障礙物距離的梯度信息查詢問題,研究者們提出ESDF地圖建圖算法。ESDF地圖同樣將空間劃分為均勻單元格,但單元格記錄的不是占據信息而是其距離最近點的距離,基于ESDF地圖能夠快速搜索得到軌跡點最近障礙物并且計算距離障礙物距離的梯度信息,從而利用優化算法對路徑進行優化獲得與障礙物保持安全距離的最優路徑。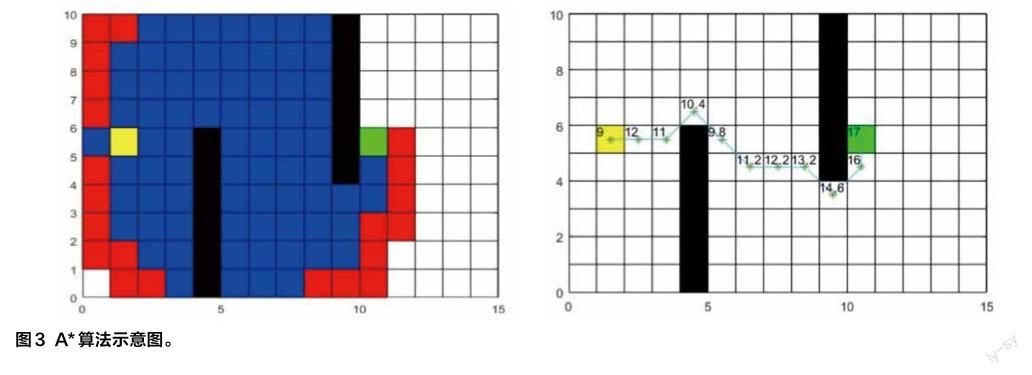
高效路徑規劃技術
在獲取無人機定位信息并且建立環境稠密地圖后,給出目標點即可通過規劃算法獲得到達目標的最優路徑,并且通過控制算法執行該路徑。無人機路徑規劃算法可分為全局路徑規劃算法和局部路徑規劃算法,全局路徑規劃算法能夠快速得到從起始點到目標點的安全路徑,局部路徑規劃算法能夠生成執行全局路徑的安全軌跡。
全局路徑規劃方法可以分為基于搜索的路徑規劃方法與基于采樣的路徑規劃方法。
A*算法是基于搜索的路徑規劃算法的代表,其搜索效率高并且具有完備性和最優性。若路徑搜索問題存在可行路徑,那么A*算法一定能夠搜索得到可行路徑,并且其搜索得到的路徑是最優的。A*算法原理如圖3所示,其對當前環境中的各個節點進行遍歷,并且維護一個開放節點容器以及一個閉合節點容器,將擴展出的新節點放入開放節點容器中,將待擴展的節點放入閉合節點容器,若目標節點被放入開放節點容器中,那么搜索成功。圖3中,黑色方塊為障礙物,黃色和綠色方塊為起點和終點,藍色方塊為擴展過的節點,紅色方塊為待擴展節點。A*算法引入了啟發函數來選擇待擴展節點進行擴展,其定義為,是起點到當前節點的實際距離,為基于曼哈頓距離計算的前節點到目標點的估計距離,在每一輪擴展中,將會選擇啟發函數最小的節點進行擴展,這一策略使得A*算法相較于Dijkstra算法大幅提高了路徑搜索效率。
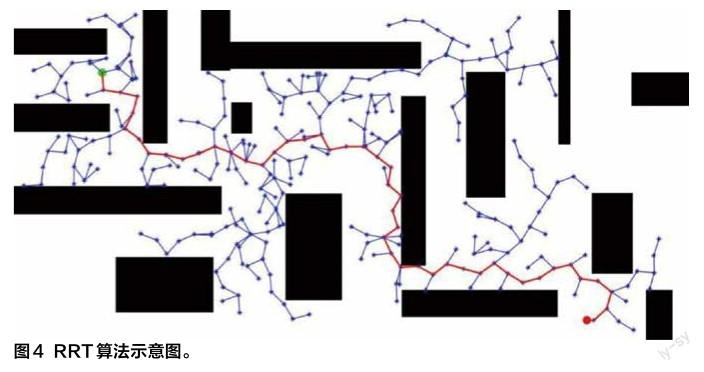
相比基于搜索的路徑規劃算法,基于采樣的路徑搜索算法在大多數環境具備更高的搜索效率。其中,快速探索隨機樹(Rapidly-exploring Random Tree,RRT)算法是基于采樣的路徑規劃算法的代表。RRT算法構建了以起始點為根節點的隨機搜索樹,通過在環境中均勻隨機采樣引導隨機樹進行生長,當隨機樹與目標點的距離小于設定的閾值,搜索結束,其過程如圖4所示。相較于A*算法,RRT算法搜索效率更高,但存在搜索路徑不是最優路徑以及搜索時間方差較大等問題。
搜索得到全局路徑后,無人機在執行全局路徑的過程中可能存在新發生的障礙物,此時需要利用局部運動規劃算法規劃局部路徑進一步提高無人機的避障能力。局部路徑規劃算法中較為經典的算法是人工勢場算法以及動態窗口算法。
人工勢場法是一種經典的局部路徑規劃算法。該方法首先在環境的基礎上建立力場,障礙物和起點對機器人有“斥力”,目標點對機器人有“吸引力”,基于構建出當前狀態下機器人所受的合力,機器人在該合力的推動下行進。人工勢場法結構簡單,能夠實現實時局部路徑規劃,避開障礙物,在單機器人局部路徑規劃中得到廣泛應用。人工勢場法示意如圖5所示。
未來發展趨勢
無人機感知與避障技術仍存在感知精度與魯棒性需要進一步提高、算法計算資源要求較高等問題,基于現有的研究現狀,未來的發展趨勢包括:基于深度學習的無人機感知技術,基于深度學習技術進一步提高感知精度與魯棒性;更高效率無人機感知與運動規劃技術,實現感知與避障算法在低算例平臺的實時運行;無人機集群感知與規劃,通過共享信息提高感知算法魯棒性并實現集群規劃。
總結
本文對復雜環境的無人機感知及運動規劃技術進行綜述,首先介紹了無人機自主感知常用傳感器及其特點,然后介紹了無人機感知與避障關鍵技術,包括同時定位與建圖技術、稠密建圖技術以及高校路徑規劃技術,最后對當前存在的不足以及未來發展方向進行簡單分析。希望本文能夠為無人機感知與運動規劃技術研究者提供啟發。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
中國工程咨詢(2016年4期)2016-02-14 07:28:28