采摘機器人機械手避障方法研究
——基于遺傳優化和模糊PID控制器
2024-01-09 09:46:44孟慶輝魏宏飛
農機化研究 2024年4期
關鍵詞:優化
王 娜,孟慶輝,魏宏飛
(河南工業職業技術學院,河南 南陽 473000)
0 引言
在自動控制領域,機械手被廣泛應用到農業和工業生產領域;在農業方面,機械手主要被應用到采摘機器執行末端的設計上。機械手性能對采摘效率和采摘質量的影響較大,如果機械手的自動化程度較高,則可以快速地鎖定待采摘的果實目標,并自動避開障礙物,移動到定位位置上,實現果實的高效率采摘。機械手移動的平穩性對果實采摘的質量影響較大,如果機械手移動和采摘過程不平穩可能造成果實的損傷,進而影響采摘的質量。因此,需要在機械手的設計中引入更多的智能控制算法,以得到更好的自動化采摘效果。
1 采摘機器人機械手避障控制系統
采摘機器人在執行作業任務時,機械手末端執行果實采摘任務是最重要的環節之一。在機械手進行果實采摘時,定位到果實的具體位置后,控制器鎖定目標位置,再控制機械手末端移動到達目標果實位置;但是在移動過程中,由于受果實枝葉和目標以外的果實的影響,會給機械手的移動造成一定的障礙。為了平穩、快速地到達目標果實位置,機械手應避開障礙物,這就需要避障系統的控制,其控制流程如圖1所示。

圖1 機械手避障控制流程Fig.1 The control process of robot obstacle avoidance
在采摘過程中,采摘機械手為了避開障礙物需要引入智能化控制系統;在鎖定采摘目標后,利用智能化控制系統使機械手避開障礙物,到達預先定位到的待采摘果實的位置;在避障過程中,為了實現自動化控制可以采用PID控制器,PID控制器采用反饋調節的方式使控制系統的誤差較小,而反饋過程可以利用模糊和遺傳算法進行優化,提高算法的效率和精度。
2 機械手模糊PID控制器設計
在采摘機器人自主化作業時,機械手的自動化程度是影響果實采摘質量和效率的關鍵因素。如果機械手在采摘果實時不能對障礙物進行有效避讓,不僅會影響其作業進度,還會碰到其他待采摘果實,造成果實的損傷;如果碰撞次數過多,還會造成機械手的損傷,故機械手自主避障功能的設計非常必要。在自動化控制器中,PID控制器是常用的自動調節控制器,在采摘機械手傳感器發現障礙物后,PID控制器可以通過反饋系統將位置信息和誤差信息反饋給控制中心,通過發出控制指令來移動機械手,實現成功避障。為了提高控制器的精度,可以采用模糊算法對其進行優化。假設初始的輸出誤差為e,反饋調節過程為
(1)
其中,Kp、Ki、Kd分別表示控制器的控制參數。在設計控制器時,需要得到一組最佳的Kp、Ki、Kd,使系統產生的誤差最小,而模糊控制算法可以實現控制器參數的優化,其流程如圖2所示。
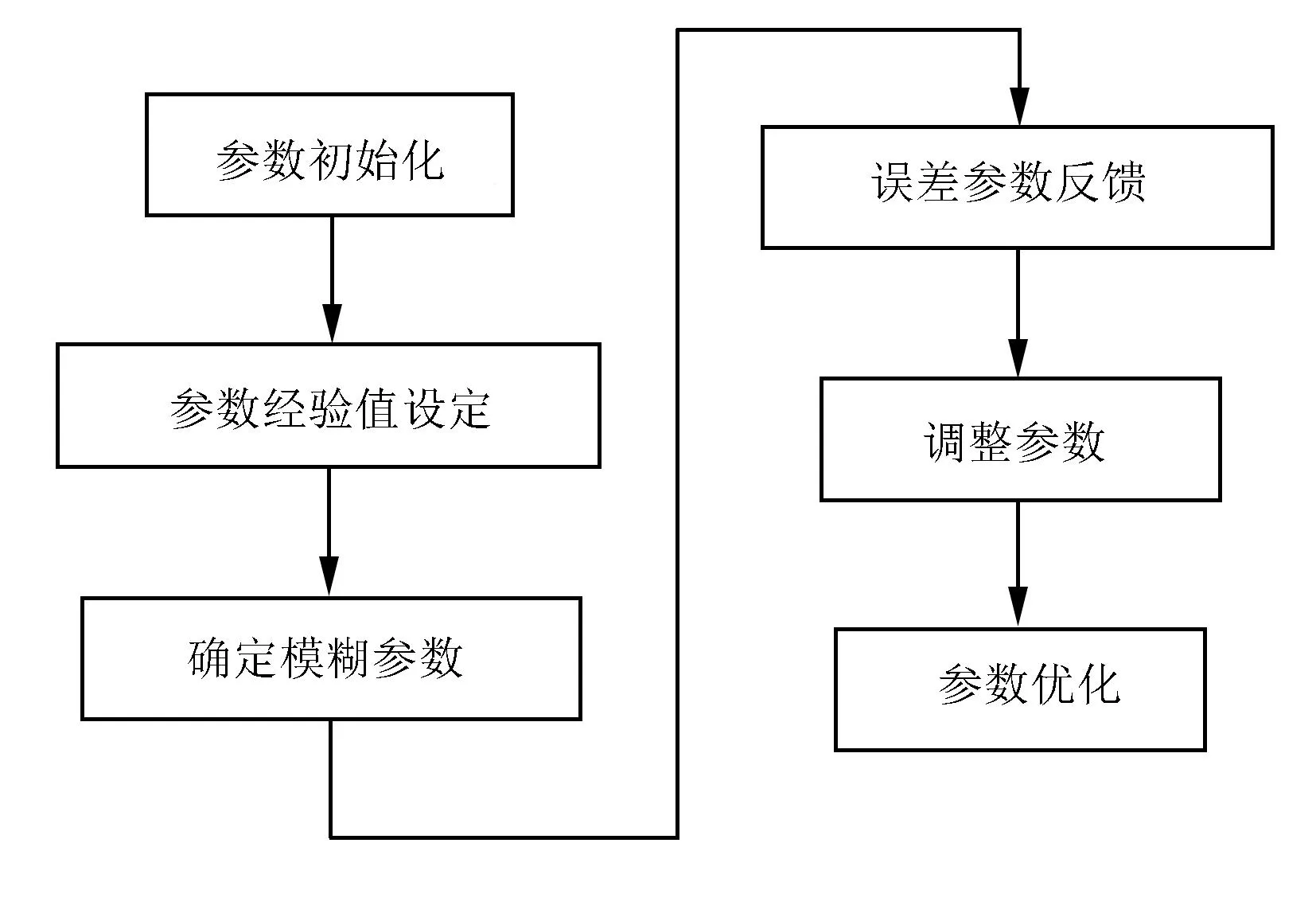
圖2 PID控制器參數優化過程Fig.2 The parameter optimization process of PID controller
在PID控制時,參數的選擇一般更具經驗值,而模糊算法可以選擇最佳經驗值,使控制誤差最小。模糊控制采用經驗值的方法,可以在模糊控制器中輸入量可以由兩部分組成,包括避障礙誤差的期望和實際值偏差以及偏差率。假設偏差為E,偏差率為EC,則輸入量為
U=α×E+(1-α)EC
(2)
其中,α為修正因子。
當E較大時,則
u=a2E+(1-a2)EC
(3)
當E較小時,則
u=a1E+(1-a1)EC
(4)
其中,修正因子α1、α2∈(0,1)且α1<α2。當輸出的控制誤差優化到最小以后,可以通過自適應調節,來控制機械手的移動速度,使機械手的移動和避障過程達到最優化。自適應過程可以利用遺傳算法的優化來實現。假設v表示1組移動速度的向量,t表示交叉次數,a表示初始移動速度,依據免疫遺傳算法首先產生一個遺傳序列,即
(5)
eval(ψm)=β(1-β)i-1(i=1,2,…,z,0<β<1)
(6)
其中,β是隨機實數,且β∈[0,1]。
利用免疫遺傳算法對比例系數進行自適應概率選擇,則
(7)


(8)
其中,y是隨機實數,且y∈[0,1]。
對比例系數進行變異操作,即
(9)
其中,N為變異種群的數目;s為變異系數。
采用遺傳算法后對移動量進行篩選,選擇最好是的機械手移動速度,以保證采摘過程的平穩性,提高采摘質量。控制器的控制流程如圖3所示。

圖3 采摘機械手控制器流程Fig.3 The process of picking manipulator controller
采摘機器人在進行采摘時,實現機械手一次移動的控制流程是:先通過傳感器鎖定待采摘果實的具體位置,再對果實周圍的障礙物進行掃描,控制器發出機械手移動的控制指令;在移動過程中,PID反饋調節控制實時的反饋位置和速度的控制誤差,并通過模糊和遺傳算法優化,來提高機械手移動時位置和速度的控制精度,最終達到高精度平穩的移動。
3 采摘機器人機械手控制器測試
隨著農業現代化和智能化技術的不斷發展,采摘機器人被應用到農業生產過程中,具有較高的作業效率,且可以持續作業。在果實成熟季節,可以幫助果園管理人員及時的收取果實,將多機器人應用到果實采摘過程中,還可以實現規模化作業。在采摘機器人自動化作業過程中(見圖4),采摘機機械手的作業環境較為復雜,因為除了作物的枝葉,其他未采摘的果實都可能成為采摘機械手的障礙物,為了實現果實的順利采摘,機械手必須具有自主避障功能。

圖4 機械手采摘果實過程Fig.4 The process of picking fruit by manipulator
采摘機械手為了躲避障礙物,首先需要對障礙物的信息進行采集,再將其傳送到控制器中心確定障礙物的位置,并發出指令使機械手有效地避開障礙物,到達鎖定的目標位置進行采摘。在機械手避障過程中,為了提高機械手移動的精度和平穩性,采用遺傳和模糊算法對其PID控制器進行了優化。遺傳模糊優化規則表如表1所示。
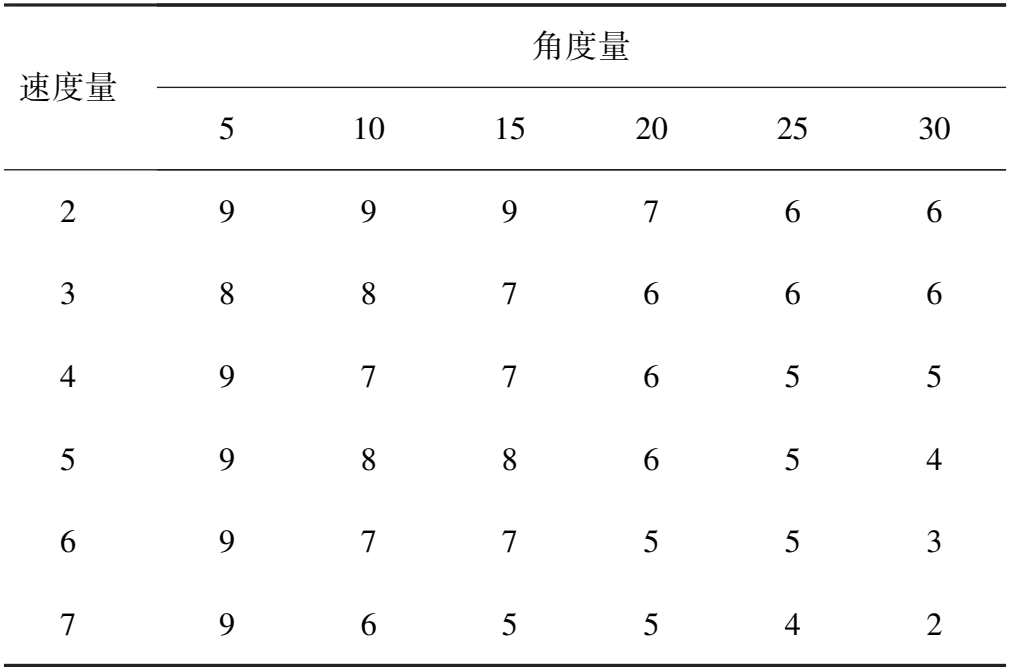
表1 遺傳模糊優化規則表
通過遺傳模糊優化可以得不同角度對應的速度模糊控制規則表,將模糊控制規則表利用編程的方式嵌入到硬件控制系統中,可以在機械手轉向避障的過程中,采用合適的速度移動機械手,從而提高機械手移動的平穩性。模擬機械手自動采摘過程的環境,設置了機械手的障礙物,對機械手的避障過程進行了測試,并根據機械手的移動過程,繪制了機械手移動軌跡結果,如圖5所示。

圖5 避障算法測試Fig.5 The test of obstacle avoidance algorithm
通過對算法的測試,得到了機械手采摘過程的移動軌跡。結果表明:采用遺傳模糊算法的PID控制器可以成功使機械手避開障礙物,達到鎖定目標位置,實現精確采摘。
為了對比遺傳模糊算法PID控制器的優勢,對不同時間機械手的穩定性進行了測試,結果如圖6所示。
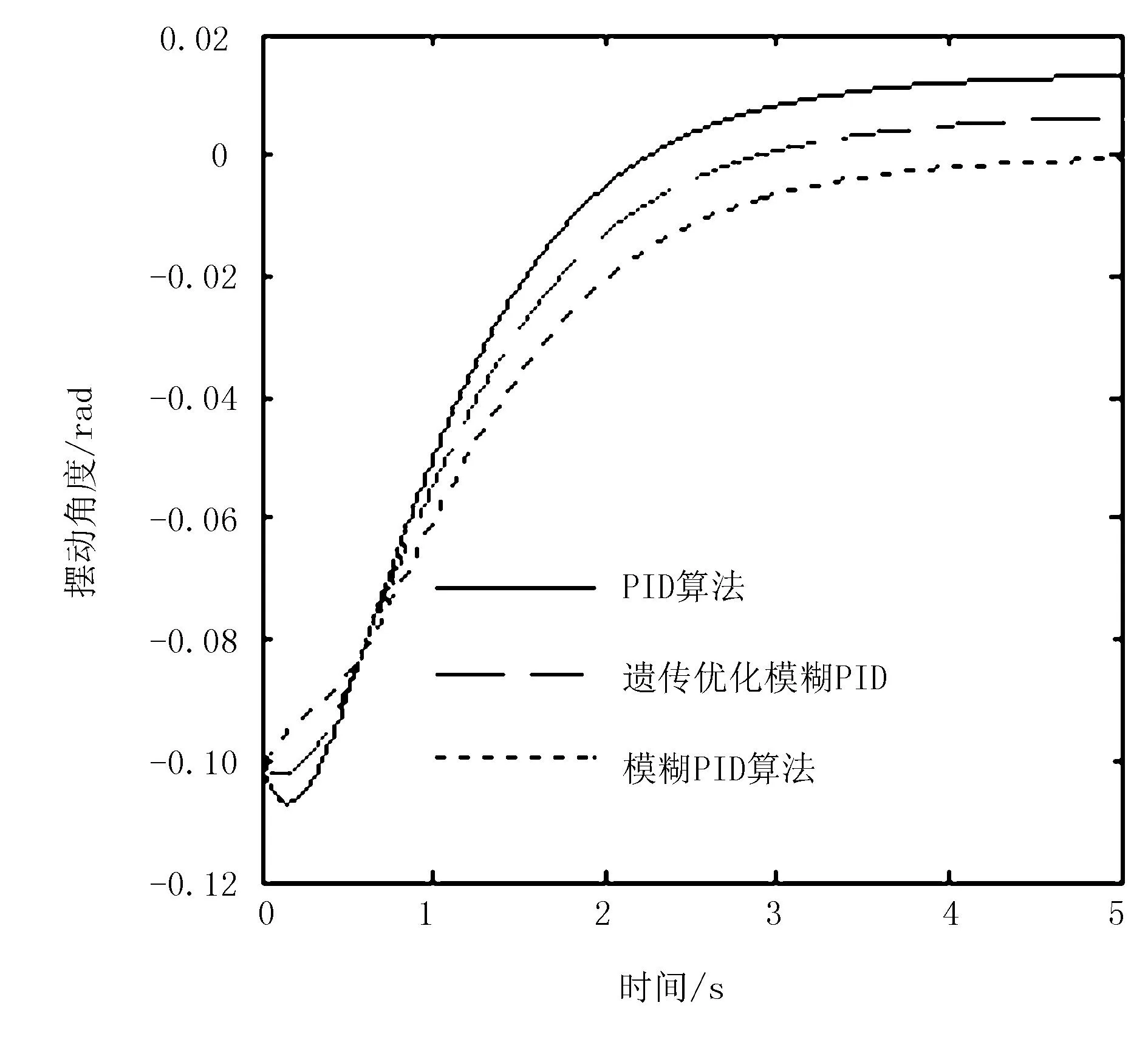
圖6 不同算法對比結果Fig.6 The comparison results of different algorithms
測試結果表明:相比單獨的PID控制器和模糊PID算法控制器,采用遺傳優化模糊PID控制器的擺動角度更小,更加趨近于0,從而可以提高機械手在采摘過程中的平穩性,對于實現果實的精確采摘和降低果實的損傷都具有重要的意義。
4 結論
為了提高采摘機器人果實采摘的準確性和穩定性,在采摘機械手的設計上使用了避障系統,在采摘果實時機械手可以成功避開影響移動的障礙物,順利到達目標果實位置。采用模糊和遺傳算法對機械手PID控制器進行了優化,優化后的控制器可以成功地實現避障功能,并在移動的平穩性上的有所有改善,對于實現果實的高精度采摘具有重要的意義。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
