溫室用純電動牽引底盤結構設計及性能仿真研究
2024-01-09 09:46:52寧廣秀叢日強
農機化研究 2024年4期
寧廣秀,張 永,王 健,張 藝,叢日強
(內蒙古農業大學 機電工程學院,呼和浩特 010018)
0 引言
近幾年,我國的農機裝備率呈逐年上升趨勢。目前,我國的農業機械動力約95%是柴油機[1-2],農業機械柴油消耗每年約6000萬t,接近全國柴油消耗總量30%。傳統燃油農業裝備存在能耗高、高污染、生產效率低、智能化程度低的問題[2]。傳統燃油拖拉機工作環境惡劣,經常處于滿負荷工作,發動機每燃燒1L燃料向大氣中釋放的二氧化碳為2.5kg,在溫室使用時會對密閉環境產生較大的空氣污染,嚴重危害使用者的身體健康[3]。我國溫室機械裝備技術起步較晚,但發展迅速,在小型農機領域中,純電動微型機械裝備對傳統燃油拖拉機具有很強的替代性[4]。
隨著人工智能技術的發展,越來越多的智能化技術被期望應用于農業機械,以減輕勞動者工作強度[5-9]。同時,多功能化的小型農用機械底盤結構也是未來我國溫室用純電動機械的主要研究方向。
目前,針對溫室用小型純電動機械的底盤結構,許多科研人員提出了幾種新穎的設計方案。張強[10]等人提出了一款由雙鋰電池組為行走、旋耕電機供電的微耕機,該微耕機底盤為履帶式行走機構,耕幅為60cm,最大耕深15cm;王元杰[11]等人設計了一款履帶式溫室用微型遙控電動拖拉機,并進行了整機性能實驗,該拖拉機可實現418mm的轉彎半徑,適用于溫室狹窄的作業環境;袁永偉[13]等人提出了一種前中后均可懸掛農機具、離地間隙可調、履帶式行走系的多功能農用底盤,該底盤由全液壓驅動,可實現四驅履帶獨立驅動,底盤升降,通過大量的計算和理論驗證了其設計的合理性;2017年,西北農林科技大學李翎寧[16]等人提出了將傳統底盤驅動系和轉向系合二為一的柔性底盤概念,該柔性底盤由4個2kW輪轂電機驅動,鉛酸蓄電池為能量單元,并在此基礎上設計了柔性底盤理論樣機,并對該柔性底盤進行了運動學與動力學特性分析。
綜上所述,目前設計的溫室用純電動作業機械多采用鉛酸蓄電池為能量輸出單元,且存在使用率低的問題。基于此,筆者設計了一款搭載了鋰離子電池的輪轂電機四輪獨立驅動的多功能純電動牽引底盤樣機,該底盤不僅可以搭載傳統農業作業裝置,還設計有農業智能管理套件機械接口,使其不僅能滿足忙時的農耕作業,還可實現閑時用于溫室作物生長管理工作,大大提高了設備的使用率。
1 牽引底盤基本結構及工作原理
作為一款溫室用牽引底盤,考慮到在未來應用時不僅會搭載傳統作業機械,還會搭載部分農作物管理設備。該底盤采用四個輪轂電機獨立驅動,取消了傳統的傳動系統,以增大結構空間;能量提供單元采用體積能量密度較高的三元鋰離子電池;底盤車架設計成雙層結構,牽引底盤結構設計緊湊,空間利用率高可實現在溫室等狹小空間的作業要求。
1.1 牽引底盤基本結構
該牽引底盤結構主要由底盤車架、驅動系統、轉向系統、電池系統、電力分配單元(PDU)、中央控制器、農具掛接接口、智能套件掛接機械接口組成,如圖1所示。其中,驅動系統由輪轂電機、升降系統組成。輪轂電機通過上下擺臂連接于底盤車架,下擺臂和底盤托架之間連接舉升氣缸,以實現底盤升降,從而增加地形通過性。底盤車架設計成中空型,托架前部中空的部分用來安裝轉向系統、PDU、中央控制器。考慮到整個牽引底盤的配重和牽引作業時的重心偏移,將鋰離子電池安裝在底盤車架前部。
1.2 驅動系統基本結構
該底盤的單輪驅動系統由上下擺臂、舉升氣缸、輪轂電機集成。其中,輪轂電機與上下擺臂通過魚眼軸承與電機支架連接,避免了底盤升降、轉向時的干涉問題。考慮到該底盤的電機控制器具有剎車功能,故取消了機械制動裝置。轉向系統通過魚眼軸承與電機支架連接,能夠實現對該底盤的轉向控制。
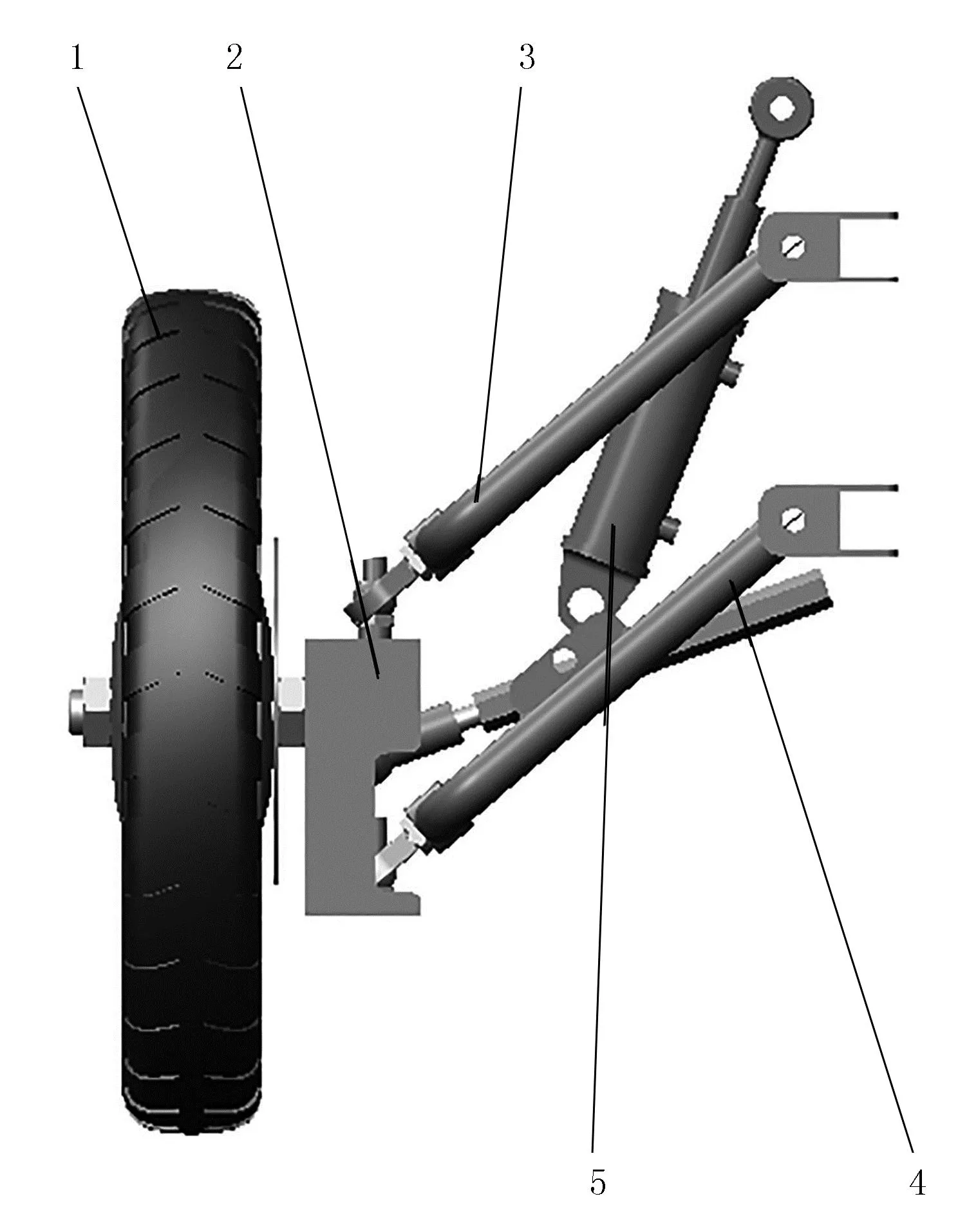
1.輪轂電機 2.電機支架 3.上擺臂 4.下擺臂 5.舉升氣缸圖2 輪轂電機驅動系統基本結構Fig.2 Basic structure of hub motor drive system
1.3 牽引底盤主要技術參數
根據底盤在溫室環境內的作業情況及其要實現的功能,確定了主要技術性能參數,如表1所示。
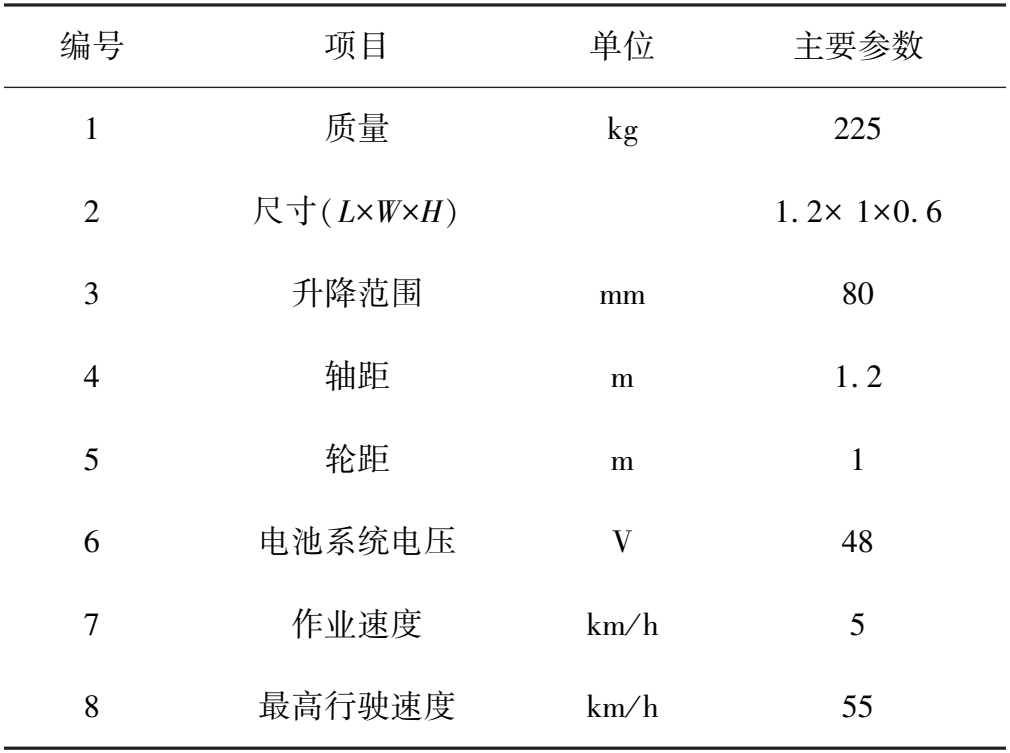
表1 純電動牽引底盤的主要技術參數
2 驅動系統性能設計及零部件選型
2.1 牽引底盤性能參數
根據傳統溫室用機械的設計要求,該純電動牽引底盤應滿足犁耕、旋耕等最基本的作業要求。同時,犁耕作業為底盤功率消耗最大的作業工況。考慮到牽引底盤主要應用于溫室內部狹小的作業空間,選用手扶通用型單鏵犁作為配套農具。單鏵犁的具體性能參數為:耕深20cm,結構質量30kg,幅寬20cm。
牽引底盤在進行犁耕作業時,行駛過程受到的阻力主要有工作阻力、滾動阻力、空氣阻力、爬坡阻力和加速阻力[15]。由于牽引底盤在進行犁耕作業時主要行駛在水平路面,行駛速度≤6km/h,故不考慮空氣阻力和爬坡阻力。在進行犁耕作業時,牽引底盤在水平路面作業時的受力分析如圖3。

注:G為牽引底盤整體質量(kg);v為牽引底盤行駛速度(m/s);Ff1、Ff2為前后輪所受滾動阻力(N);Fq1、Fq2為前后輪提供的牽引力(N);FT為 農具的牽引阻力(N)。
根據力的平衡關系,在進行犁耕牽引作業時牽引底盤平衡行駛的受力方程式為
Fq=∑F
(1)
其中,Fq為該底盤能提供的額定牽引力(N);∑F為該底盤所受的行駛阻力(N)。
Fq=Fq1+Fq2
(2)
∑F=Ff1+Ff1+FT
(3)
在犁耕作業工況下,牽引底盤由農具帶來的牽引阻力FT的計算公式為
FT=(1.1~1.2)k·Z·Bn·h
(4)
作業時所受到的滾動阻力計算公式為
Ff=mgf
(5)
其中,k為土壤比阻(kPa),溫室內土壤選取k=50kPa;Bn為犁的耕作寬幅,設計值為Bn=20cm;h為犁耕深度,取h=20cm;f為溫室土壤環境下的滾動阻力系數,取f=0.12;g為重力加速度,取g=9.8m/s2;m為牽引底盤,取m=225kg。
聯立以上公式,計算得FT=2200~2400N, 取FT=2300N,Fq=262.5N,故該牽引底盤在犁耕作業時需要克服的阻力為F=Ff+FT=2300+262.5=2562.5N,取整為FT=2600N,即額定牽引力為2600N。
2.2 驅動電機參數匹配與計算
2.2.1 輪轂電機額定功率
牽引底盤由4個獨立的輪轂電機驅動,設計額定功率時要充分考慮到其能滿足犁耕作業的工況。由以上的分析計算可知,該作業工況下牽引底盤的額定牽引力為2600N。該牽引底盤的額定牽引總功率計算公式為[16]
(6)
其中,Pt為額定牽引總功率(kW);v為底盤進行犁耕作業時的行駛速度(km/h),取v=5.5km/h;η為牽引效率,參考傳統燃油拖拉機的值,取η=0.6。將以上數值帶入公式(6)中,計算得該牽引底盤的額定功率為6kW。單個驅動系統的輪轂電機功率P=Pt/4=1.5kW。
2.2.2 輪轂電機額定轉矩與峰值轉矩
從牽引底盤的使用場景來看,電機輸出扭矩比較大,同時要求轉速不能太高,選定為350~1200r/min。本文設計的純電動牽引底盤取消了傳統的變速箱,選擇的輪轂電機內部集成了變速系統。單個輪轂電機的額定轉矩為
(7)
其中,Te為電機的額定轉矩(N·m);P為輪轂電機的額定功率,取P=1.5kW;nt為電機基速,取nt=530 r/min。根據以上計算結果,輪轂電機的選型參數如表2所示。
3 動力電池選型設計及測試
3.1 電池容量選擇
動力電池的容量對純電動機械的動力性能和經濟性能至關重要,純電動機械還存在結構尺寸空間的限制,所以選用體積能量密度高的電池為首要目標。目前,電動汽車用的三元鋰離子電池包的能量密度比鉛酸電池高出2~3倍,隨著電池技術的發展其成本也越來越低[19],所以本文選用三元鋰離子電池作為牽引底盤的車載能源電池。
使用該牽引底盤犁耕作業時的循環工況計算電池容量[20]。當進行旋耕作業時,蓄電池消耗的總能量計算公式為
(8)
其中,Eb為電池包總能量(kWh);Sa為犁耕作業速度下的續航里程,取Sa=5.5km;η為牽引效率,取η=0.6;SOC為電池包荷電狀態(%);SOCH為初始荷電狀態,取SOCH=100;SOCL為終止荷電狀態,取SOCL=10;F為犁耕作業時牽引底盤所受的牽引阻力,由以上計算可知F=2600N。帶入相關公式,可得電池包的總能量Eb=7kW·h。
電池包容量的計算公式為
(9)
其中,Ce為電池包容量(Ah);Ue為額定電壓,取Ue=48V。代入式(9),則電池包的額定容量為145Ah。
3.2 電池組設計
單體電芯選用三元鋰離子圓柱18650電芯,單體電芯額定電壓為3.7V,容量為2.5Ah。成組采用13個模組串聯,每個模組由58顆單體電芯并聯。成組后的電池系統如圖4所示。

圖4 鋰離子電池系統Fig.4 Lithium ion battery system
3.3 電池組放電能力測試
3.3.1 電池組放電實驗設計
實驗對象為牽引底盤用48V145Ah電池系統,實驗使用的設備為新威牌60V150A充放電柜。實驗環境溫度為室溫25℃,實驗前對電池包進行2個1C充放電循環的預處理,實驗開始前電池包荷電狀態為100%。為了盡可能模擬實際放電效果,放電工步設置如表3所示。鋰離子電池系統放電過程如圖5所示。
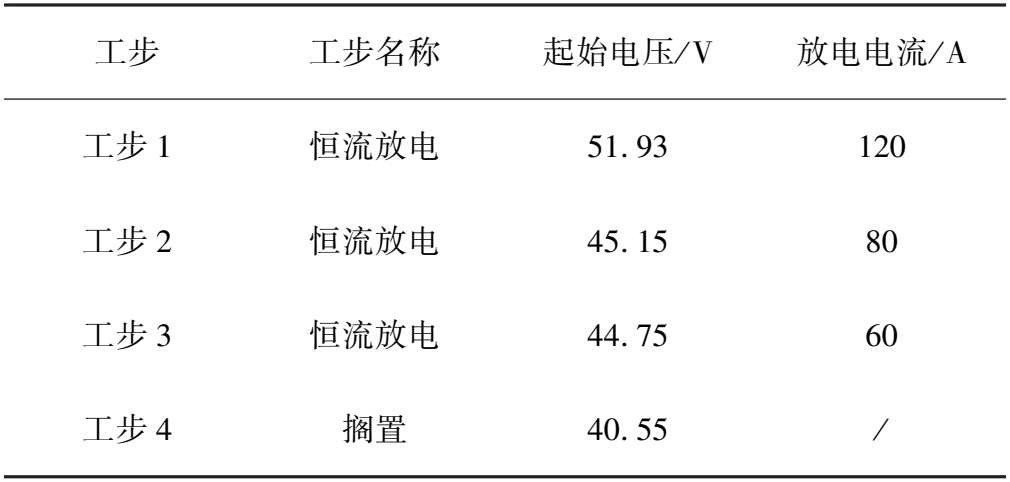
表3 電池系統放電工步設置

圖5 鋰離子電池系統放電過程Fig.5 Discharge process of lithium ion battery system
3.3.2 電池組放電實驗結果
電池組放電實驗結果如圖6所示。由圖6可知:在120A、80A、60A電流持續放電條件下,分別持續1h、0.2h、0.2h,放電總能量為6750W·h,該電池系統設計滿足實際使用要求。
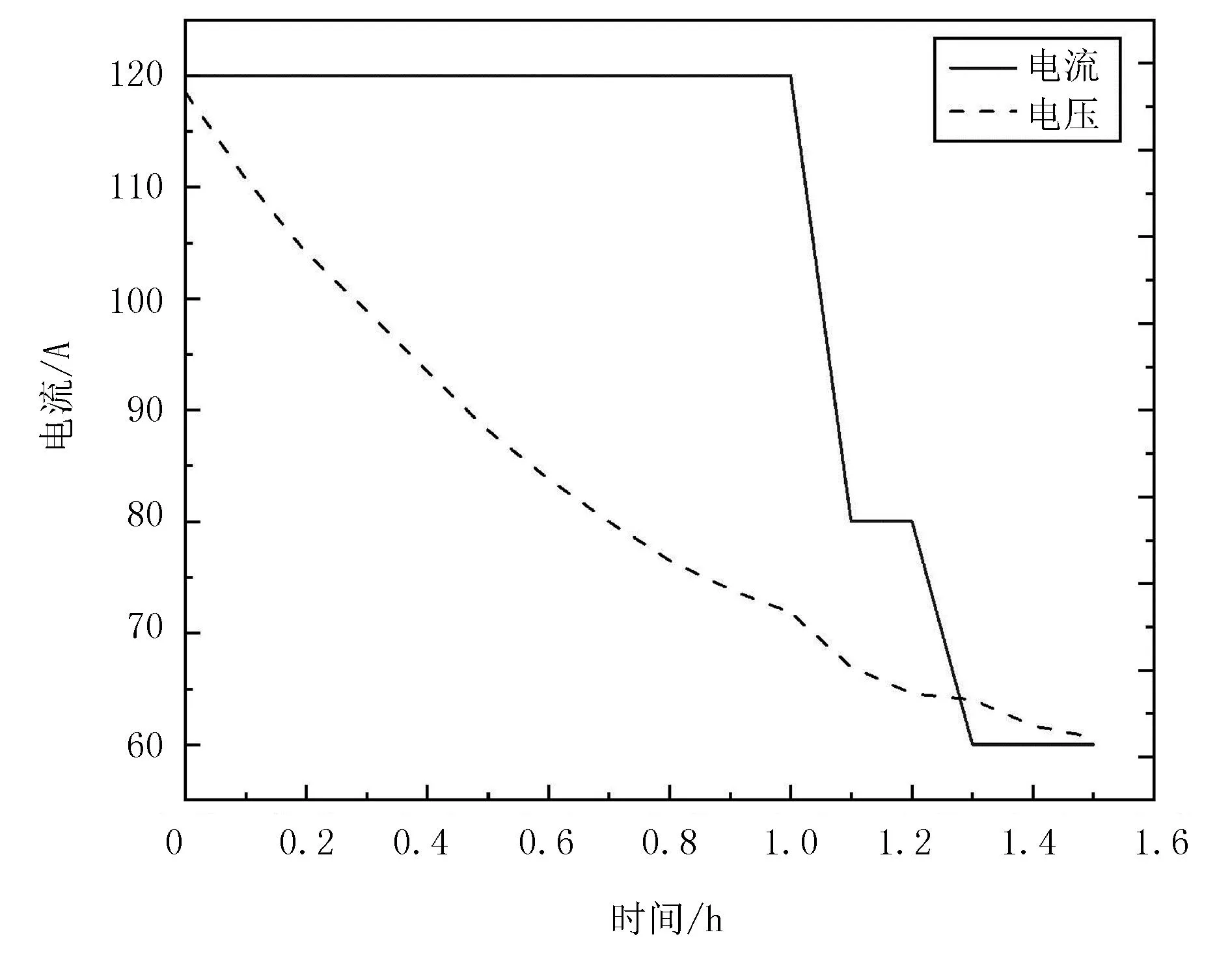
圖6 電池系統放電電壓-電流曲線Fig.6 Discharge process of lithium ion battery system
4 牽引底盤性能仿真
MatLab/Simulink是一種可視化仿真工具,能夠對汽車的總體性能、行駛消耗、結構零部件進行質量評估[21]。本文通過Simulink對牽引底盤進行系統建模,輸入該底盤的技術參數可直接觀測出牽引底盤的性能情況。
4.1 建立底盤仿真模型
4.1.1 建立犁耕作業下的整車能耗模型
使用Simulink建立該牽引底盤前向仿真模型,該模型包含駕駛員模型、傳動系統模型、電機模型、電池模型及底盤模型。其中,運行速度設置為犁耕作業下的5.5km/h;犁耕阻力設置為變阻力,通過在Simulink模塊內引入一個正態分布的隨機數模塊,將犁耕阻力限定在2300~2900N內隨機波動,運行時間設定為3600s。點擊運行后,可進行犁耕作業狀態下該牽引底盤能量消耗仿真。
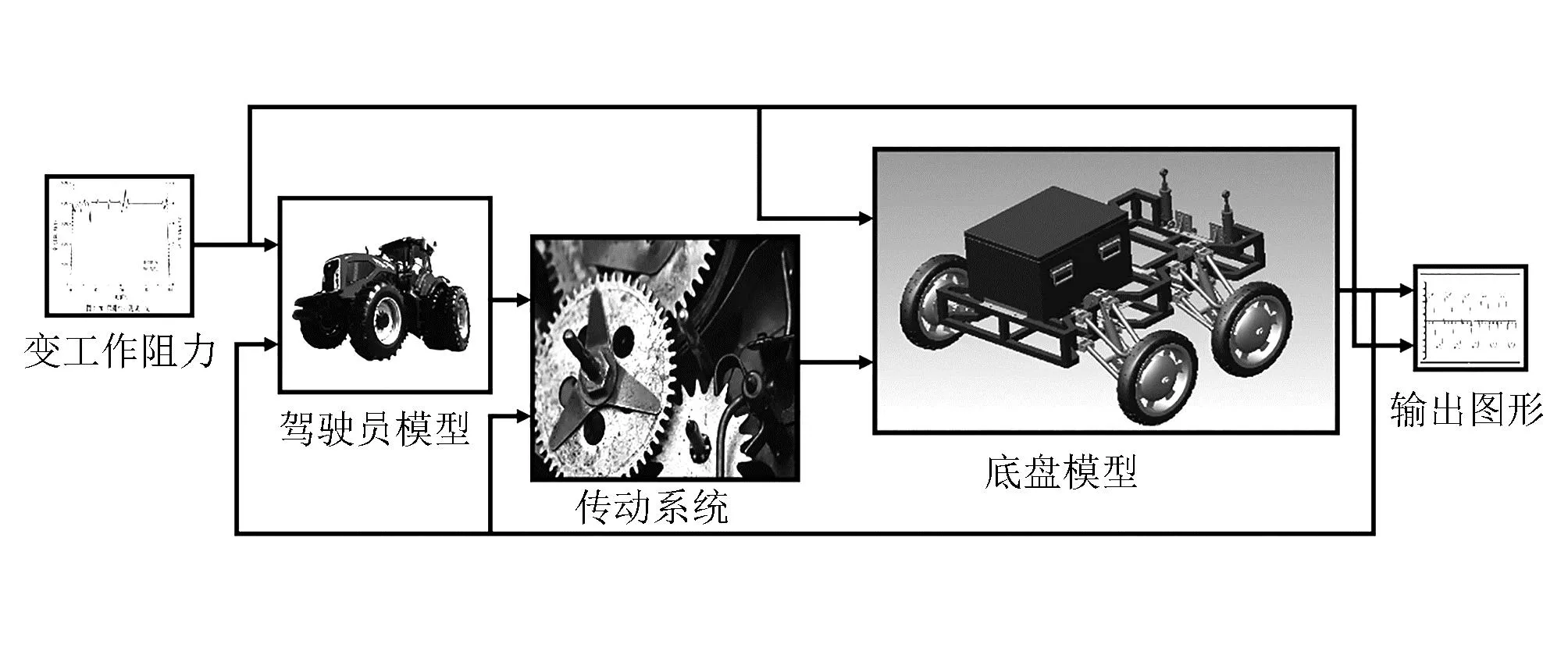
圖7 犁耕作業下的整車能耗模型Fig.7 Energy consumption model of whole vehicle under plough operation
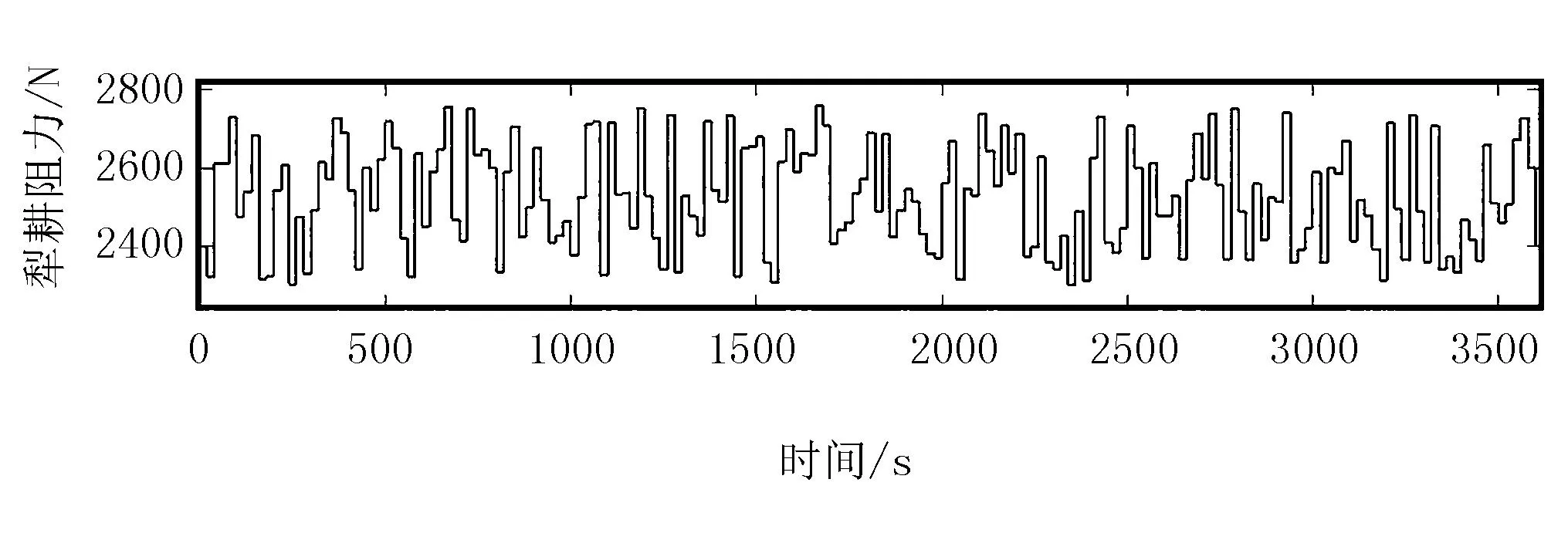
圖8 犁耕作業下的變阻力曲線Fig.8 Variable resistance curve under ploughing operation
4.1.2 建立犁耕作業下的整車能耗模型
根據上文介紹的牽引底盤驅動力計算方程建立Simulink仿真模型,通過輸入該牽引底盤的結構、電機等相關參數,可仿真分析出該牽引底盤的最大輸出驅動力、空載下的最高行駛速度和加速度、最大爬坡度能力。
4.2 仿真結果
通過Matlab/Simulink對該牽引底盤在犁耕作業工況下進行整機能耗的仿真以及基本牽引性能的仿真,結果如圖9~11所示。
由圖9可知:該牽引底盤模型在1h的犁耕作業工況下,電池系統荷電狀態(SOC)減少了80%,與電池系統實際放電結果相比放電能耗誤差為3.3%,存在此誤差的主要原因為在進行電池系統放電實驗時無法在放電柜上設計電流突變以模擬模型中變阻力下的電流變化;在設定的5.5km/h的作業速度下,作業距離為5.4km,與實際設定的作業距離誤差為1.8%。兩者的仿真結果與實際結果誤差均在5%以內,符合實際使用情況。
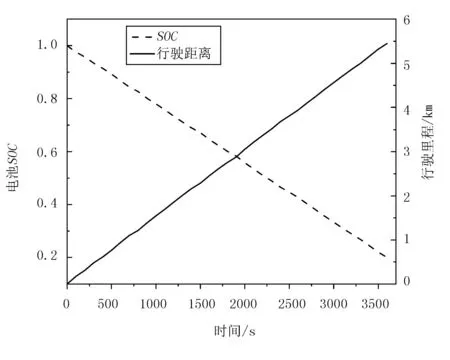
圖9 犁耕作業工況下能耗&里程曲線Fig.9 Energy consumption&mileage curve under ploughing condition

圖10 牽引底盤牽引力與空載行駛阻力曲線Fig.10 Traction force of traction chassis and no-load driving resistance curve
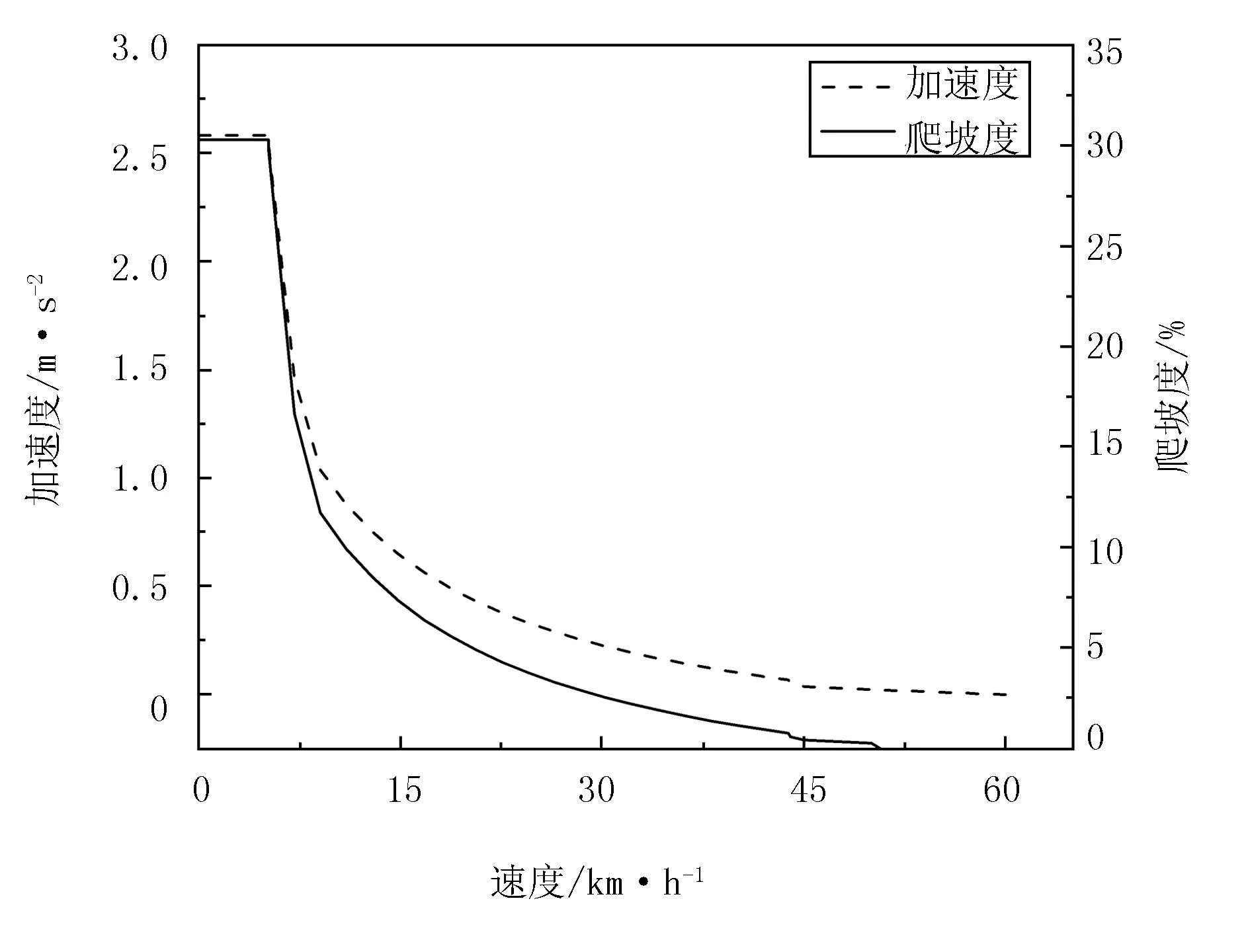
圖11 牽引底盤爬坡度&加速度曲線Fig.11 Grading curve of traction chassis
由圖10可知:牽引底盤的最大牽引力可以達到3700N;當驅動力與行駛阻力相等時,底盤達到最大運行速度,即55km/h。由圖11可知:牽引底盤在0~5km/h速度時的加速度為2.6m/s2、最大爬坡度為30%,達到了預期的設計目標。
5 結論與展望
1)通過分析溫室內純電動機械現狀及未來發展方向,設計了一款基于輪轂電機的純電動牽引底盤。牽引底盤搭載了三元鋰離子電池,經過理論計算,額定功率設計為6kW,額定牽引力為2600N,電池能量設計為7kW·h,可滿足單鏵犁在溫室環境內作業1.2h的要求。
2)通過MATLAN/Simulink仿真分析可知:牽引底盤最高行駛速度為55km/h,最大爬坡度30%,最大牽引力3700N。
3)仿真分析了牽引底盤在溫室內犁耕作業工況下的能耗情況,在1h的持續循環作業情況下牽引底盤共行駛5.4km,電池系統共計輸出能量5.6kW·h,符合實際使用情況。
本課題組在該實驗研究的基礎上,后續將要對純電動牽引底盤進行普通路面及溫室作業能力測試,以驗證牽引底盤的動力性能及仿真模型的準確性,并希望能通過以上實驗來發現該牽引底盤的不足。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(2013年3期)2013-06-24 05:40:30
