拖拉機多重模糊PID變論域耕深調節研究
2024-01-09 09:46:54李瑞川丁馨鎧孫祺友劉繼魯
農機化研究 2024年4期
李瑞川,丁馨鎧,孫祺友,程 懿,劉 琦,劉繼魯
(齊魯工業大學(山東省科學院) 機械工程學部,濟南 250353)
0 引言
耕深均勻性是拖拉機田間工作質量的重要評價指標,直接影響到農田作物的生長發育[1-5];但在實際耕作過程中,由于拖拉機所處環境條件變化較大,使得耕深均勻性變差。目前,耕深均勻性調節方式主要有單參數調節和混合調節。其中,單參數調節分為力調節、位置調節以及滑轉率調節3種[6-9]。將其中兩種或者多種調節方式結合在一起就形成了混合調節[10-11],混合調節同時考慮了影響耕深均勻性的多重因素,效果較好,在農用機械領域應用較廣[12-13]。混合調節方案主要有疊加式和切換式兩種。以力-位置混合調節為例,疊加式調節是將力調節與位置調節按一定比例疊加,比例劃分主要通過加權系數決定,調整加權系數即可調整力與位置調節所占比例。切換式調節則是通過優化算法確定最優單參數調節,即力調節與位置調節可柔性切換,使得耕深控制始終處于最優工作模式下。
為此,筆者基于現有的模糊PID控制,將力、位置及滑轉率通過多個模糊控制器結合在一起,形成一個多重模糊PID變論域耕深控制系統,并根據三者對耕深的影響程度和對各參數的控制目標進行優化選擇,可實現模糊控制器論域的實時調整、PID控制參數的一次及二次調整,從而實現耕深的粗調和細調,保證耕深的相對均勻。
1 拖拉機耕深調節基本原理
拖拉機耕深調節系統原理如圖1所示。開始作業前,駕駛員通過操控面板確定理想耕深量,控制器基于車速傳感器、轉速傳感器和力傳感器采集得到的數據計算得到當前耕深、滑轉率及牽引力,并根據這些參數完成對農具高度的控制,從而實現耕深的調整。
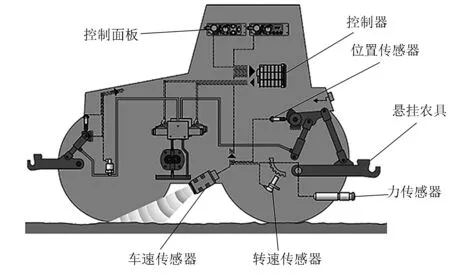
圖1 拖拉機耕深調節系統原理圖Fig.1 Schematic diagram of tractor tillage depth adjustment system
2 多重模糊PID變論域耕深控制系統原理
在此,提出一種多重模糊PID變論域耕深控制系統,工作原理如圖2所示。控制系統由3個模糊控制器與1個PID控制器組成。第1級模糊控制器與PID控制器組成常規的模糊PID控制,第2級模糊控制器完成對第1級模糊控制器論域的調整,第3級模糊控制器實現PID控制參數的二次調整(即實現耕深的微調)。位置是影響耕深最顯著的參數,將位置設定為耕深調整的主要控制參數。當土壤阻力發生較大變化時,耕深變化也較大,通常使得模糊PID系統的論域不再適合當前狀態,需要對論域做出適時調整。因此,將力設定為模糊PID系統變論域的參數。滑轉率相對力和位置對耕深均勻性影響相對較小,可作為耕深的細調量參數。簡單而言,位置調節用以耕深的粗調,滑轉率調節用以耕深的細調,力調節作為變論域的依據。多重模糊PID變論域耕深控制系統的控制流程如圖3所示。
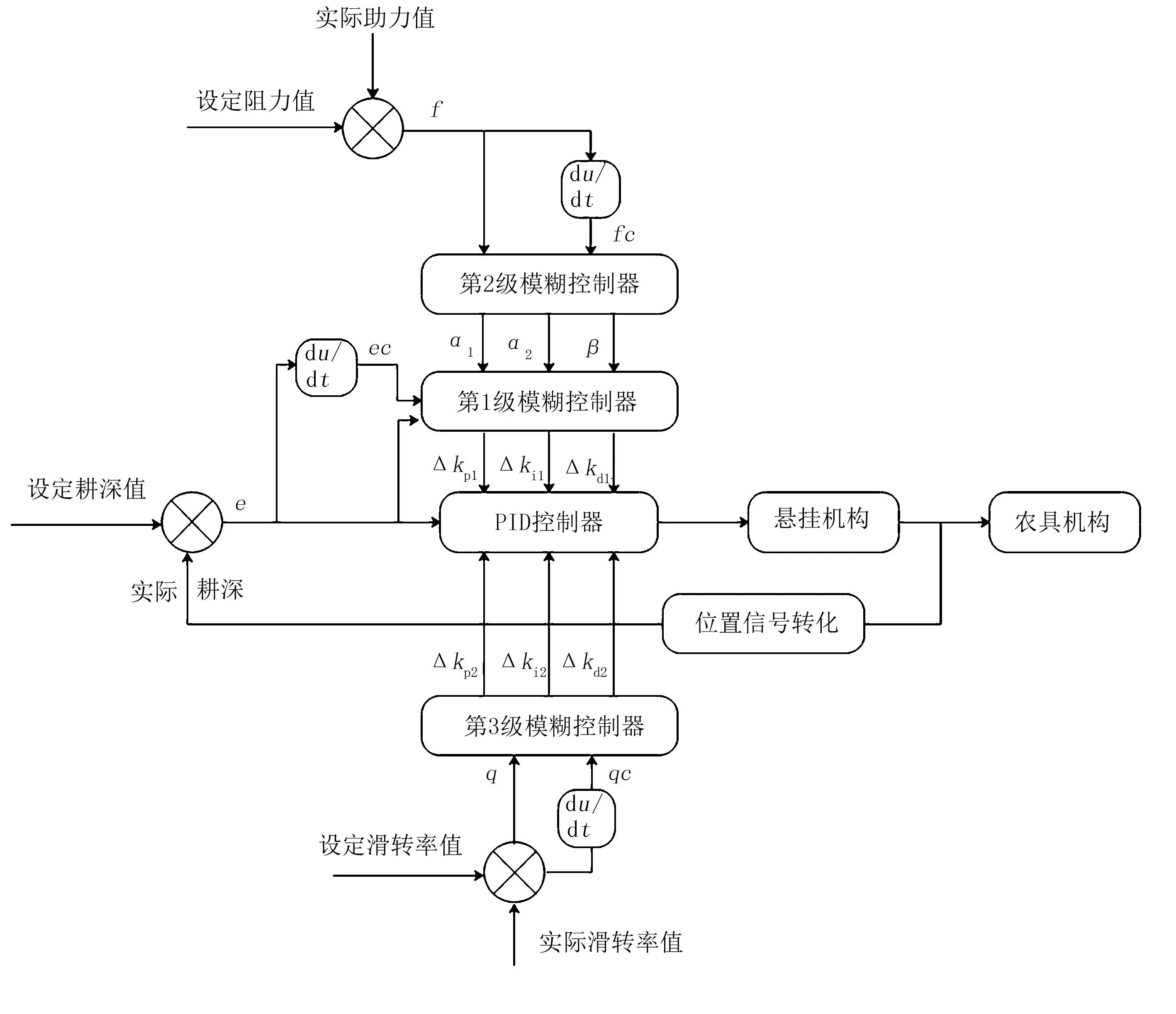
圖2 控制系統原理圖Fig.2 Schematic diagram of control system
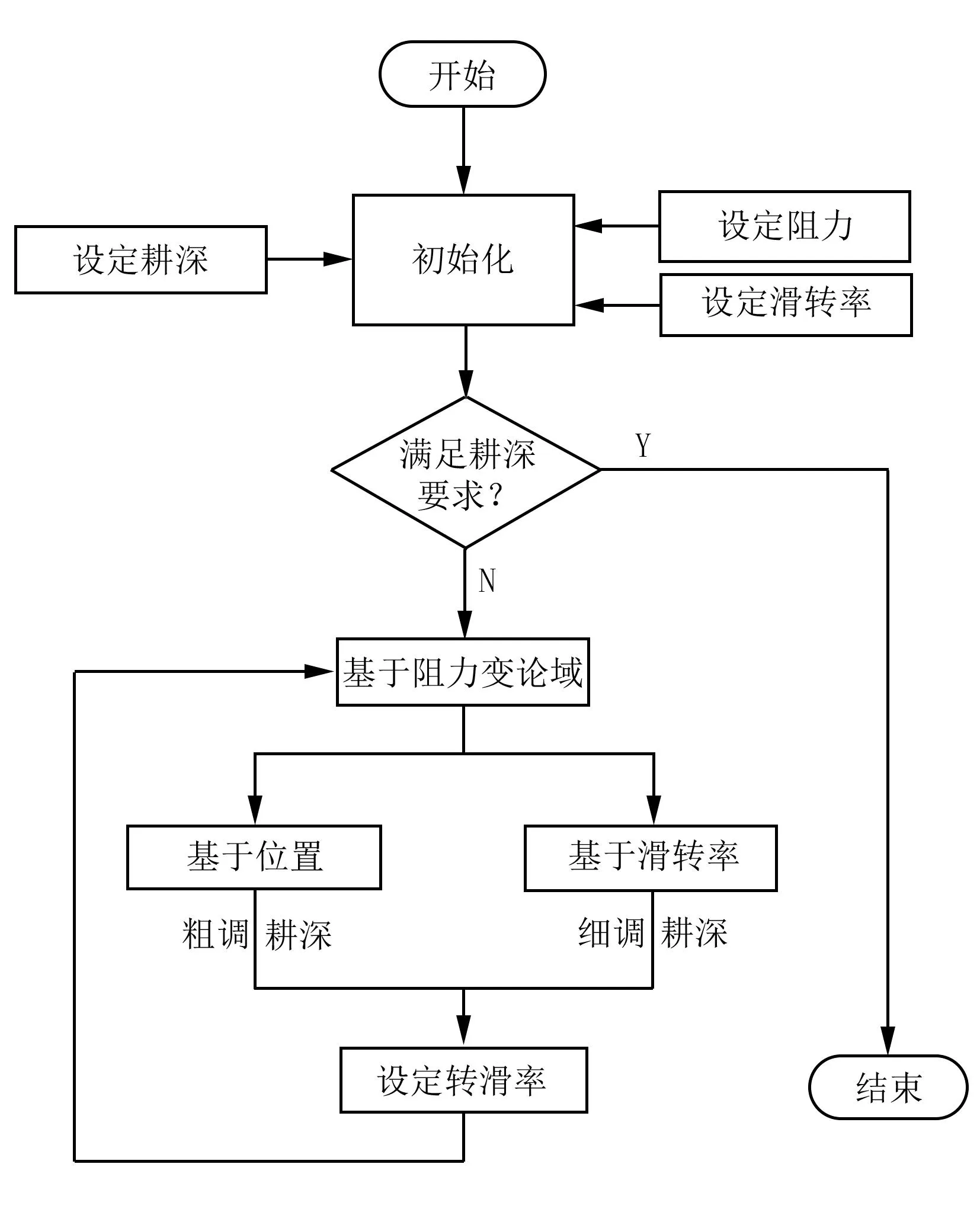
圖3 控制流程圖Fig.3 Control flow chart
具體而言,第1級模糊控制器的輸入變量為實際耕深與設定耕深的差值e及差值的變化率ec,輸出變量為PID控制器控制參數的一次調整量Δkp1、Δki1及Δkd1,以實現對耕深的粗調。輸入變量及輸出變量的模糊集為{NB,NM,NS,ZO,PS,PM,PB},采用三角形隸屬函數和重心法解模糊規則。第1級模糊控制器控制規則如表1所示。
第2級模糊控制器是基于土壤阻力實現對第1級模糊控制器論域的調整,其輸入變量為實際土壤阻力與設定土壤阻力的差值f及差值的變化率fc,輸出變量為第一級模糊控制器輸入論域的伸縮因子α1、α2及輸出論域的伸縮因子β。輸入變量及輸出變量的模糊集為{NB,NM,NS,ZO,PS,PM,PB},采用三角形隸屬函數和重心法解模糊規則。第2級模糊控制器的控制規則如表2所示。
第3級模糊控制器基于滑轉率實現對PID控制參數的二次調整,從而達到耕深的細調。其輸入變量為實際滑轉率與設定滑轉率的差值q及差值的變化率qc,輸出變量為PID控制參數的二次調整量Δkp2、Δki2及Δkd2。輸入變量及輸出變量的模糊集為{NB,NM,NS,ZO,PS,PM,PB},采用三角形隸屬函數和重心法解模糊規則。第3級模糊控制器的控制規則如表3所示。
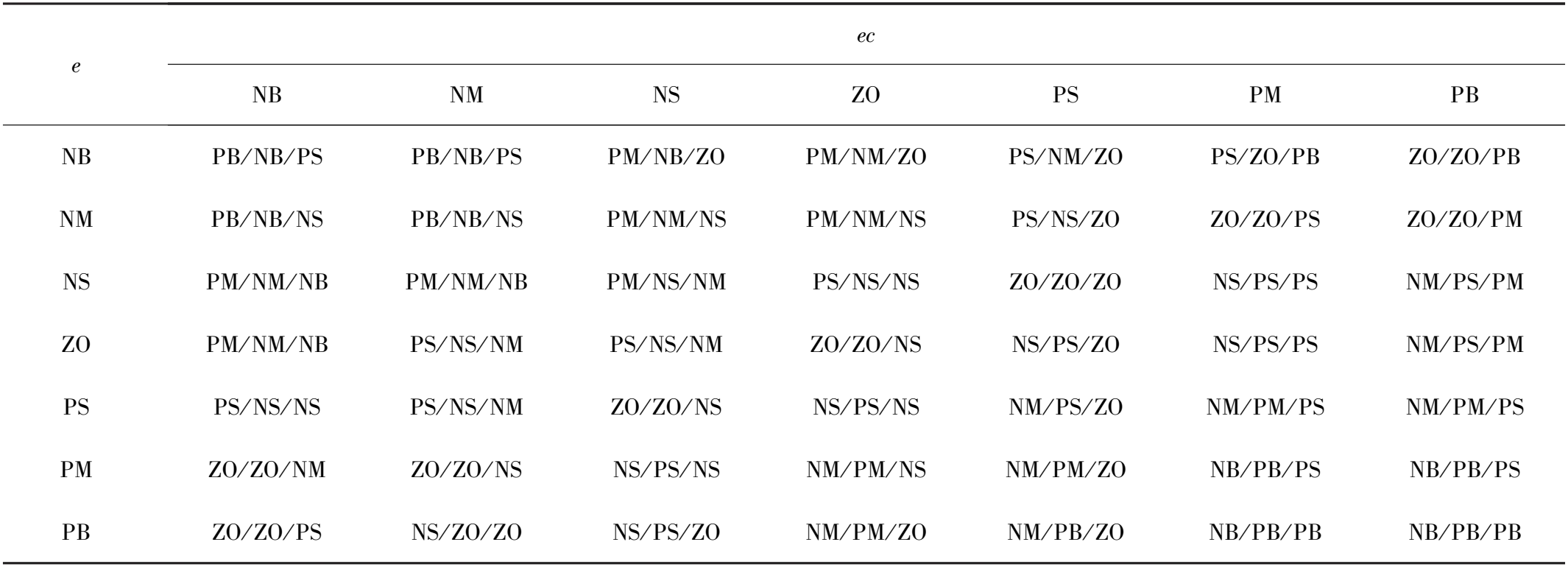
表1 第1級模糊控制器控制規則
表2 第2級模糊控制器控制規則
表3 第3級模糊控制器控制規則
經多重模糊PID變論域耕深控制器綜合調整后的耕深E可表示為
(1)
(2)
3 田間試驗
為探究多重模糊PID變論域耕深控制器在實際耕深作業中表現的優越性能,以PH1404型拖拉機為載體,掛接1LF-435型四鏵翻轉犁進行田間試驗,如圖4所示。選用傳統的模糊PID控制和多重模糊PID變論域耕深控制兩種控制方式,基于實際耕種需要,設定耕深為26cm、車速為8km/h,試驗所得數據如圖5、圖6所示。為保證試驗數據的準確性,數據從耕作后15s開始提取。圖5中,耕深為負值表示耕深為向下方向。
圖4 試驗圖Fig.4 Experimental diagram

圖5 耕深對比Fig.5 Comparison of tillage depth
圖6 滑轉率對比Fig.6 Comparison of slip rate
由圖5可知:多重模糊PID變論域控制的耕深均勻性較好,實際耕深在-26cm上下波動,且波動幅度小于模糊PID控制。由圖6可知:多重模糊PID變論域控制的實際滑轉率在0.19上下波動,相對模糊PID控制波動范圍較小,不存在滑轉率大幅波動的情況。田間試驗表明:多重模糊PID變論域控制具有較好的控制精度,耕深均勻性得到較大提高,且滑轉率也得到了一定改善。
4 結論
基于現有的3種耕深控制方式,提出了一種多重模糊PID變論域耕深控制方法。該方法將3種耕深控制方式結合在一起,并根據每部分對耕深影響程度的不同對所控制的目標進行選擇。在傳統模糊PID控制器的基礎上增加了兩個模糊控制器,第1級模糊控制器根據位置信號對PID控制器參數進行一次調整,實現對耕深的粗調;第2級模糊控制器根據土壤阻力信號實時調整第1級模糊控制器的論域,實現變論域的目的;第3級模糊控制器根據滑轉率信號對PID控制器參數進行二次調整,實現對耕深的微調。田間試驗表明:多重模糊PID變論域控制相對傳統的模糊PID控制可達到更好的耕深均勻性,且滑轉率在一定程度上也得到了改善。
