基于振動信號的鉆機工況判斷研究
2024-01-11 10:43:18李軍
山東煤炭科技 2023年12期
李 軍
(中煤新集能源股份有限公司,安徽 淮南 232001)
近年,煤炭行業正在逐漸向智能化方向發展,煤炭精準化開采向“少人化、無人化”轉型[1-4]。國家能源局、原國家煤礦安全監察局在《關于開展首批智能化示范煤礦建設的通知》中確定71 處煤礦作為國家首批智能化示范建設煤礦。鉆機是進行煤礦開采的重要設備,鉆機的鉆進、回退、鉆桿結合等各項操作均需要專業人員現場手動操作,因此遠程判斷鉆機的各種動作并遠程操縱鉆機工作成為實現煤炭開采智能化、少人化發展首要解決的問題。
由于液壓泵是鉆機的主要動力源,因此一些學者通過對液壓泵的狀態進行檢查判斷鉆機的工況[5-7]。由于液壓泵故障狀態與故障特征之間的非線性關系,引入改進多尺度熵故障特征提取方法,采用支持向量機算法建立液壓泵的故障模式識別模型,實現對液壓泵的故障識別[8]。聯合應用經驗小波變換和模糊C 均值聚類算法的礦用千米定向鉆機動作識別方法通過提取電動機、液壓泵和聯軸器振動信號的經驗小波函數的不同的特征,根據提取的特征量識別鉆機的不同動作[9]。對ZDY6500LQ 型全液壓動力頭式鉆機進行了整機振動測試與分析,對比分析了不同工作狀態下鉆機不同測點位置的振動總量,得到鉆進設備的主要振動激勵源[10]。
以上研究對鉆機工作狀態分析的算法都較為復雜,且需要的傳感器數量較多。本文提出一種根據安裝在鉆桿導向套部件上的加速度傳感器采集到的振動加速度信號,遠程判斷鉆機進行鉆進、回退以及鉆桿結合等不同動作的方法。
1 測試方案設計
1.1 實驗器材的選擇
本文以ZYW-3200 煤礦用全液壓鉆機為研究對象。該鉆機主要用于煤礦井下鉆進瓦斯抽(排)放孔、注漿防滅火孔、煤層注水孔、防突卸壓孔、地質勘探孔及其他工程孔,適用于巖石堅固性系數f≤12的各種煤層、巖層。該鉆機采用GBD20 礦用本安型振動傳感器采集振動加速度信號,該傳感器高度集成化,其有效部件為精心選擇的壓電陶瓷材料-鋯鈦酸鉛壓電陶瓷(PZT)和慣性質量塊,可廣泛應用于各種振動和沖擊測量,具備靈敏度高、抗干擾能力強等優點。
1.2 信號測點的選擇
鉆機的振動測點如圖1 所示。為防止鉆機部件運動造成傳感器線纜纏繞或傳感器脫落,將傳感器測點設置在鉆桿導向套部件上。測點1 設置在導向套側面,測點2 設置在導向套正面左下角,測點1、2 位置均低于鉆桿,傳感器線纜從鉆機下方穿過,從而避免線纜接觸鉆桿造成纏繞。測點1 用于分析鉆機橫向振動,測點2 可分析鉆機軸向振動。
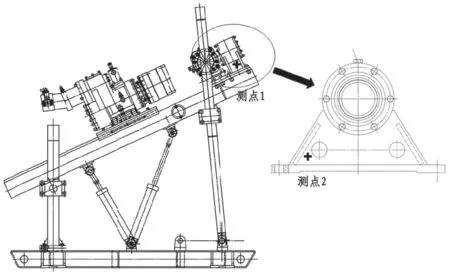
圖1 鉆機及測點示意圖
1.3 振動信號的選擇
在瓦斯鉆孔施工過程中,鉆桿、鉆頭等組成的鉆桿系統承受著自重、給進阻力、轉矩、阻尼、鉆桿與孔壁接觸碰撞力及鉆桿與煤巖摩擦阻力等綜合作用,不僅會產生縱向、橫向、扭轉振動,還可能產生耦合振動。為進行鉆桿系統在鉆進施工中的動載受力分析,對相關條件進行簡化和假設:1)鉆進地層為彈塑性體;2)鉆具為絕對剛體;3)鉆具振動時僅考慮粘滯阻力;4)鉆頭為兩翼弧角PDC鉆頭,鉆頭端部始終與巖石接觸;5)鉆桿與孔壁間的碰撞為彈性碰撞,鉆孔軸線與鉆具軸線重合。
研究表明,鉆進過程中鉆具的橫向振動、縱向振動產生機理和振動波傳遞一般規律、鉆桿振動特性變化的物理力學機制,隨著鉆進工況變化作用于鉆機鉆頭的作用力而產生相應變化。據此,結合煤礦井下實際狀況與鉆機自身特點,通過現場工程實踐,系統地對比分析不同鉆進工況下鉆桿鉆進振動信號特性,提出基于鉆桿振動檢測技術的鉆進工況識別的方法,實時監測鉆具的橫向及縱向振動信號,并分析識別特定振動信號幅值判定鉆具的振動工況,在掘進工程中即可實時、高密度地獲取鉆進設備工況,不僅為地質結構探測節約了大量的人力物力,而且對井下智能化鉆進的安全高效作業具有較高的實用價值和指導意義。
2 現場測試數據分析
通過對鉆機鉆進過程中鉆具振動的產生機理與振動波傳遞規律的研究,不同鉆進工況如鉆桿鉆進、鉆桿回退、鉆桿結合等,在實際鉆進過程中會產生不同的振動信號,如果能在鉆機鉆進過程中收集并記錄振動信號,通過后期的數據處理及分析研究,即可識別鉆進過程中的實際工況,實現井下智能識別鉆進工況。本實驗在此需求分析的基礎上設計實驗,用于監測鉆機鉆進過程中鉆具的振動情況,以此判別鉆機鉆進的實際工況。
為了驗證該方法的可行性,開展實地井下鉆孔實驗,實驗場地為劉莊煤礦。劉莊煤礦位于安徽阜陽市潁上縣境內,礦區南距縣城約20 km,西至阜陽市40 km。劉莊煤礦井田面積82 km2,煤炭儲量15.6 億t,可采儲量6.79 億t,每年的生產能力超過800 萬t。本次實驗環境將傳感器安裝在鉆機設定的測點處,采集了四組巖石孔鉆孔的橫向、縱向振動信號,并對四組信號進行幅值分析,傳感器的采樣頻率為50 000 Hz,結果如下所示:
1)井下通道巖石孔1
圖2 和圖3 分別為井下通道巖石孔1 的橫向和縱向的振動加速度信號,井下通道巖石孔1 進行的為全程鉆機鉆進實驗。從圖中可以看出,當鉆機在鉆進過程中加速度傳感器采集到鉆桿受到的振動沖擊信號為高頻高幅值的信號,其中采集到的橫向振動加速度信號的峰值為46.9 m/s2,平均值為4.5 m/s2,軸向振動加速度的峰值為54.1 m/s2,平均值為6.0 m/s2。由此可發現在井下鉆探實際過程中鉆桿軸向受到的沖擊激勵相較于鉆桿橫向受到的沖擊激勵大,且均無主頻,因此在實際處理時可將鉆桿振動信號視為隨機信號。
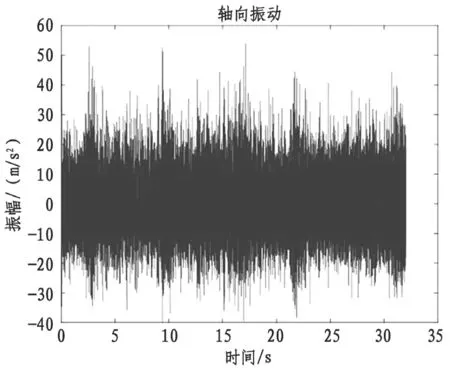
圖2 巖石孔1 橫向振動信號
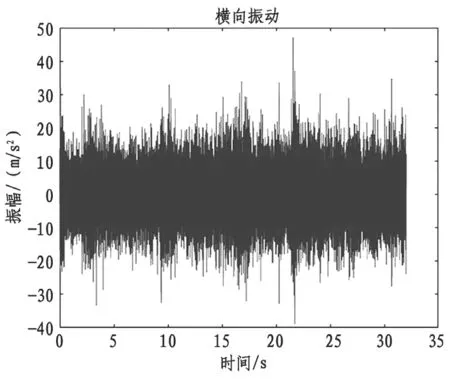
圖3 巖石孔1 縱向振動信號
2)井下通道巖石孔2
井下通道巖石孔2 包含了鉆桿結合、鉆機回退和鉆機鉆進三種工況,具體工況振動信號波形如圖4 所示,其中測點1 為橫向振動,測點2 為軸向振動。

圖4 巖石孔2 不同工況振動信號波形
井下通道巖石孔2 在第9 秒開始鉆機進行鉆桿結合,持續9 s 在第18 秒完成結合。第18 秒到第32 秒鉆機處于退鉆狀態,在第32 秒到第46.5 秒鉆機鉆進,第46.5 秒到第48 秒鉆機回退,第48 秒到第63 秒鉆機鉆進。鉆機進行鉆桿結合從開始到完成各有一次明顯的振動,開始進行鉆桿結合時產生超過100 m/s2、最高接近200 m/s2持續1 s 的高幅值振動加速度信號,并且該振動信號振動幅度相較于正常情況的振動幅度差別極大,具備很強的標志性,因此鉆桿結合時通過識別高振幅信號即可識別該工況。當鉆機進行鉆桿回退時鉆桿振動較小,峰值為3.2 m/s2,平均值為0.1 m/s2。當鉆機鉆進時,振動加速度信號的峰值為87.8 m/s2,平均值為4.0 m/s2。
3)井下通道巖石孔3
井下通道巖石孔3 包含了鉆機鉆進和鉆機回退兩種工況,具體工況振動波形如圖5。
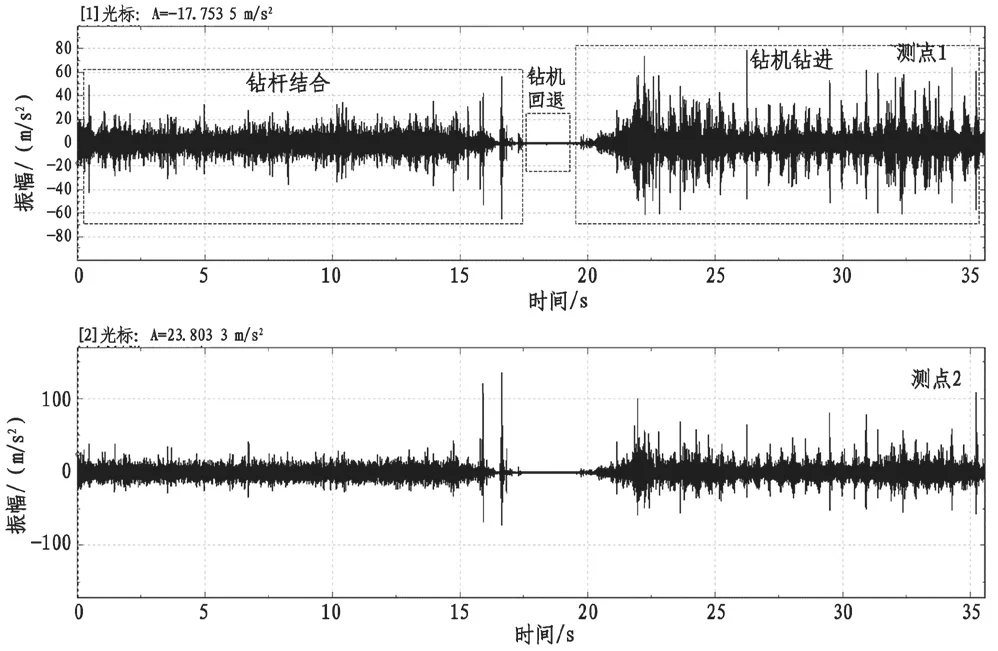
圖5 巖石孔3 不同工況振動信號波形
井下通道巖石孔3 前17.5 s 為鉆機鉆進過程,第17.5 秒到第19 秒為鉆機回退狀態,第19 秒到第36 秒為鉆機鉆進過程。當鉆機處于鉆進狀態時,鉆桿橫向振動信號的最大幅值為79.7 m/s2,平均幅值為4.2 m/s2。當鉆機進行鉆桿回退時,鉆桿橫向振動信號的最大幅值為1.2 m/s2,平均幅值為0.1 m/s2。對比巖石孔2 的鉆桿結合動作,巖石孔3 軸向振動信號的第17 秒出現了超過100 m/s2的振動加速度信號且之后產生了一段振幅較小的振動信號,由于這段信號僅持續4 s,因此判斷此動作為鉆桿回退。
4)井下通道巖石孔4
井下通道巖石孔4 包含了鉆機鉆進和鉆機回退兩種工況,具體工況振動信號波形如圖6。
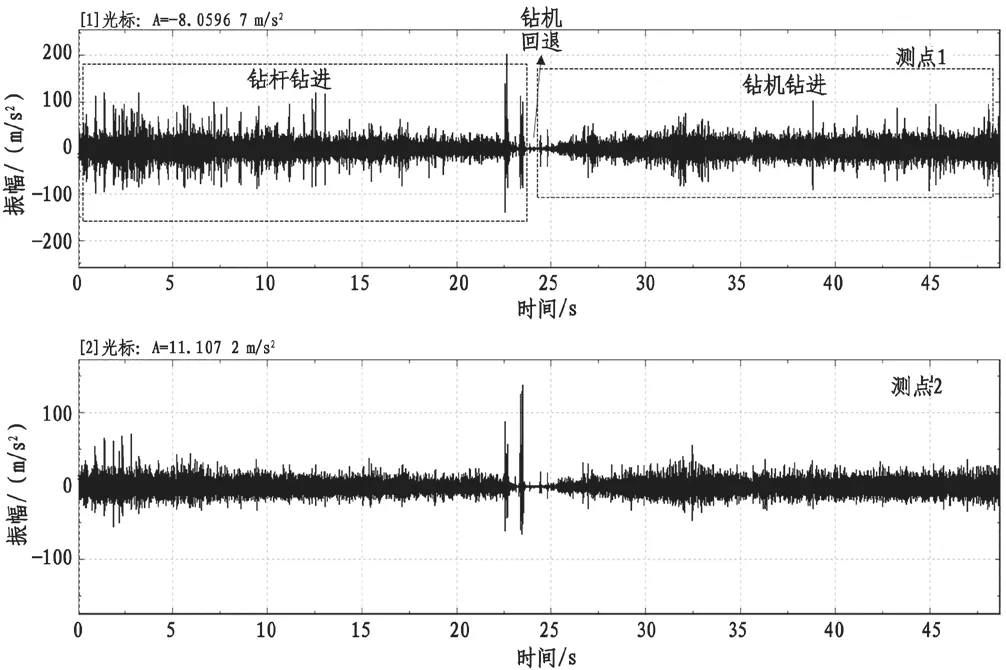
圖6 巖石孔4 不同工況振動信號波形
井下通道巖石孔4 前23 s 為鉆機鉆進過程,第23 秒到第24 秒為鉆機回退狀態,第24 秒到第49秒為鉆機鉆進過程。當鉆機處于鉆進狀態時,鉆桿橫向振動信號的最大幅值為102.8 m/s2,平均幅值為4.1 m/s2。當鉆機進行鉆桿回退時,鉆桿橫向振動信號的最大幅值為5.5 m/s2,平均幅值為0.3 m/s2。
3 鉆進工況識別技術展望
1)智能化鉆進工況識別理論
受煤礦井下空間及高瓦斯、高粉塵、潮濕作業環境的限制,井下鉆探技術具備一定的特殊性并明顯區別于地面鉆探,因此實現井下智能化鉆探的技術路徑有異于地面,井下智能化鉆進工況識別[11]是未來精準鉆孔要求的基礎。井下智能化鉆進工況識別主要通過運用高精度傳感器技術、隨鉆測量技術、鉆桿的高效傳輸與通信技術、智能識別技術、井下小型化數據處理設備等,實現煤礦智能化鉆進工況識別以及現場實測并分析,最大限度減少鉆進人員工作量及單臺鉆機配套人員數量,提高井下鉆井工作效率。
2)多參信息監測融合技術
現階段監測技術仍處于起步階段,目前的參數并不能完全滿足實際工況需求,存在關鍵參數缺失的情況,因參數缺失造成智能化技術難以鋪展。因此,參數選取仍需要改進,研發關鍵設備實現補齊參數。基于相關學者對于鉆桿振動特性的研究[12-13],研發高精度傳感器結合隨鉆鉆桿技術,將振動信號傳感器設置在鉆頭后方,能夠最大限度避免因鉆進進尺距離造成振動信號失真;研發鉆桿高效通信技術與設備,實現鉆頭后方數據實時監測、處理、智能辨識鉆機鉆進工況;研發井下防爆小型數據處理設備,對實時工況進行采集與分析,并通過井下環網向地面發送鉆進設備的工作狀態,為地面生產調度人員提供相關數據制定生產工作計劃。
4 結論
由以上實驗可知,對于鉆機的鉆進、回退和鉆桿結合三種動作,加速度傳感器采集到的信號有明顯區別。當鉆機處于鉆進狀態時,在鉆機鉆桿導向套位置采集到的振動加速度信號為持續的高頻高幅值的信號,通常采集到的振動加速度信號的振幅在50 m/s2左右,平均值5 m/s2左右,偶爾會出現超過100 m/s2的振動加速度信號,但持續時間較短。鉆機的鉆桿結合動作持續時間為9 s 左右。當鉆機進行鉆桿結合時,在結合的開始和完成各會產生一次尖峰振動,第一次振動的振動加速度信號為峰值超過100 m/s2、最高接近200 m/s2的高幅值信號,在鉆桿結合完成時產生的振動加速度信號為峰值40 m/s2左右的信號,在兩次振動之間的振動加速度信號幅值較小峰值為8 m/s2,平均值為0.2 m/s2。當鉆機進行回退時鉆桿受到的振動較小,峰值為4 m/s2左右,平均值為0.1 m/s2。由此可得,當鉆機的動作不同時,鉆桿受到的振動也不同,因此通過振動加速度信號判斷鉆機動作具有一定的可行性。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00