一種SAR成像區(qū)域規(guī)劃方法及軟件可視化界面實現(xiàn)
2024-01-12 02:27:50邢智勇莫亞軍
艦船電子對抗 2023年6期
邢智勇,陳 曄,莫亞軍
(中國航天科工集團有限公司第三研究院三十五研究所,北京 100010)
0 引 言
合成孔徑雷達成像技術(shù)是一種被廣泛應(yīng)用的二維雷達成像技術(shù),利用雷達平臺的運動來等效獲得一個虛擬的大孔徑天線,從而獲得具有方位和距離兩維高分辨率的雷達圖像。與光學、紅外等傳感器相比,合成孔徑雷達具有全天候、全天時工作能力的獨特優(yōu)點,在戰(zhàn)場偵察、目標打擊、氣象遙感、速度測量等軍事、民用領(lǐng)域被廣泛應(yīng)用[1]。針對SAR成像的特點,對地面上某區(qū)域能否成像需要考慮雷達功率、增益和目標后向散射能量大小,可以根據(jù)成像雷達方程來評估,在滿足圖像最小信噪比(SNR)的情況下,實現(xiàn)對某區(qū)域的一定分辨率成像。由此可知,在不考慮只針對某特定地面場景的前提下,雷達的成像范圍主要取決于雷達的作用距離、掃描范圍等系統(tǒng)參數(shù)信息。但雷達方程只能得到某個點回波的信噪比,而且波束掃描范圍在地面投影的計算也比較復(fù)雜,故實際應(yīng)用中能在給定最小成像信噪比的情況下進行快捷成像區(qū)域規(guī)劃,將所有滿足條件的點進行輸出并直觀表示,這在實際工程應(yīng)用中具有較為重要的意義。
本文中設(shè)計的主要使用方向為無人機攜帶雷達SAR成像時可成像區(qū)域選擇或者實時雷達波束解耦。在無人機攜帶雷達SAR的匹配區(qū)選擇中,本文中的可視化界面可以方便地得到雷達掃描范圍中所有滿足分辨率的成像點,大大簡化了選取成像區(qū)后還要核算成像參數(shù)的步驟,提高了工程效率。在機載SAR的使用中,本軟件可以根據(jù)規(guī)劃航跡進行波束解耦,顯示機載軌跡上雷達的可成像區(qū)域。
1 成像區(qū)規(guī)劃約束
雷達掃描區(qū)域的規(guī)劃從不同角度推導(dǎo)雷達可成像邊界條件,根據(jù)不同的成像約束確定不同的邊界條件,滿足所有邊界條件的區(qū)域即是滿足成像需求的區(qū)域。雷達的成像約束主要包括掃描范圍的地面投影位置、成像分辨率和功率約束等。
雷達掃描范圍的地面投影位置是根據(jù)雷達的作用距離和雷達姿態(tài)、波束掃描角等輸入?yún)?shù),對雷達姿態(tài)進行坐標系轉(zhuǎn)換,在完成坐標系轉(zhuǎn)換后,即可得到雷達波束的掃描范圍在地理坐標系中的投影。
雷達成像分辨率主要影響對雷達的功率需求、積累時間等參數(shù)設(shè)計。在給定雷達北天東三維速度的情況下,根據(jù)雷達方程即可得滿足給定分辨率時,不同波束指向角度下雷達的作用距離。
1.1 雷達掃描范圍
在根據(jù)雷達姿態(tài)和波束掃描范圍確定雷達在地面的投影時,還需要根據(jù)雷達的姿態(tài)進行坐標系轉(zhuǎn)換。實際過程中主要應(yīng)用的坐標系有:
(1) 地理坐標系St(簡稱t坐標系)。當?shù)乇?天-東地理坐標系中,原點ot取在雷達質(zhì)心上,xt軸指向北,yt軸垂直于當?shù)厮矫嬷赶蛱?zt軸指向東。
(2) 導(dǎo)航坐標系Sg(簡稱g坐標系)。原點og取在雷達質(zhì)心,由地理坐標系繞otyt軸逆時針旋轉(zhuǎn)A角度得到。xg軸平行于由上一導(dǎo)航點指向下一導(dǎo)航點(或目標)的方向,yg軸垂直于當?shù)厮矫嬷赶蛱?og-xgygzg構(gòu)成右手坐標系。
(3) 雷達坐標系Sb(簡稱b坐標系)。原點ob取在雷達質(zhì)心上;xb軸與雷達縱軸一致,指向雷達陣面;yb軸位于雷達縱向平面內(nèi),垂直于xb軸指向雷達背面;ob-xbybzb構(gòu)成右手坐標系[2-3]。

圖1 雷達坐標系示意圖
設(shè)俯仰角為?s,偏航角為ψs,滾動角為γs,通過坐標系轉(zhuǎn)換的方式計算雷達波束指向角。將雷達與目標連線在雷達坐標系下各分量的相對角度分為2個階段,先是得到雷達與目標連線P1P在導(dǎo)航坐標系下的分量[Δx,Δy,Δz]T,其中P1P與導(dǎo)航坐標系間的夾角分別為視線俯仰角qf、視線方位角qh。其關(guān)系如下:
(1)
此時的視線方位和視線俯仰角在雷達坐標系中,往往通過設(shè)置雷達的俯仰方位視線角掃描范圍來約束雷達的成像能力;然后進行坐標轉(zhuǎn)換,將其轉(zhuǎn)換到地理坐標系中,即可通過投影的方式得到雷達的成像區(qū)域。
雷達將波束指向從雷達坐標系轉(zhuǎn)換到地理坐標系需要考慮2個方面,即雷達的姿態(tài)和速度。雷達的姿態(tài)決定了雷達坐標系Sb與導(dǎo)航坐標系Sg的坐標關(guān)系。根據(jù)前述中坐標系定義可知,雷達坐標系Sb相當于導(dǎo)航坐標系Sg在x-o-y平面內(nèi)以o點為中心旋轉(zhuǎn)?s,再在x-o-z平面內(nèi)以o點為中心旋轉(zhuǎn)ψs,最后在y-o-z平面內(nèi)以o點為中心旋轉(zhuǎn)γs得到。而雷達速度的水平分量決定了A角,由于導(dǎo)航坐標系的定義就是從本時刻導(dǎo)航點指向下一時刻導(dǎo)航點,故A角即是雷達速度方向與北向的夾角,通過將導(dǎo)航坐標系Sg旋轉(zhuǎn)A度即可得到地理坐標系St。雷達的坐標系轉(zhuǎn)換框圖如圖2所示。

圖2 雷達波束掃描范圍地理系投影幾何關(guān)系轉(zhuǎn)換
經(jīng)過以上設(shè)計,可以根據(jù)雷達姿態(tài)條件和雷達波束掃描能力,計算出雷達實際可覆蓋區(qū)域。
1.2 雷達方程與分辨率
雷達的波束解算確定了雷達波束覆蓋范圍。根據(jù)雷達方程,除了雷達增益、功率、噪聲系數(shù)等自身能力,雷達作用距離與成像分辨率、斜視角、速度等成像條件相關(guān),因此需要根據(jù)不同分辨率需求和成像條件,核算出雷達作用距離。結(jié)合雷達波束覆蓋能力,得到雷達可成像區(qū)域在地理坐標系的投影。典型的成像場景如圖3所示,雷達在經(jīng)過回波積累的過程中從P1到P2點,根據(jù)此時的速度v,斜視角α,雷達與目標間距R1等參數(shù)即可判斷雷達的成像分辨率是否滿足需求。SAR成像的雷達方程如下[2]:
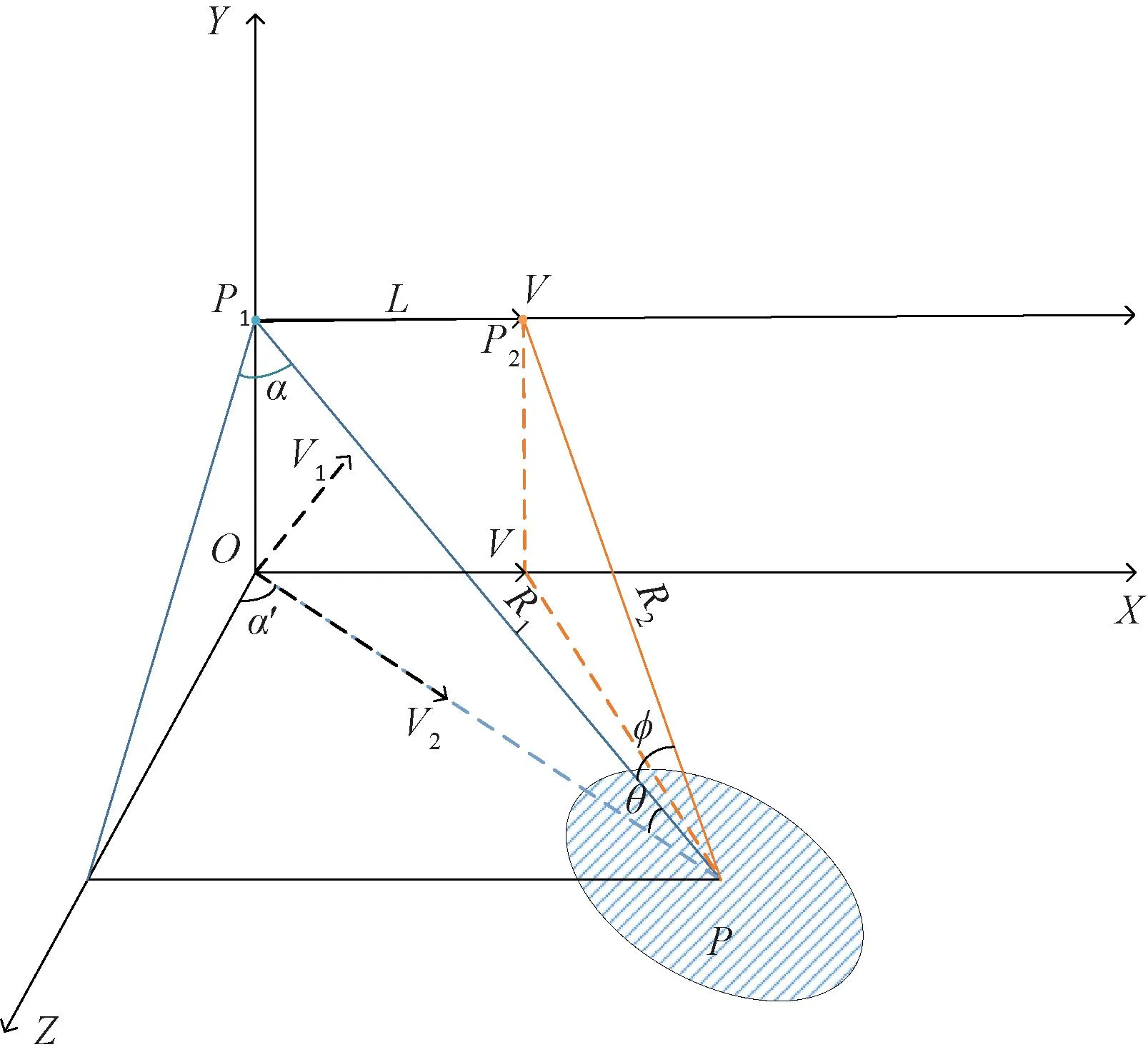
圖3 雷達坐標系下成像場景
(2)
式中:Pav為平均發(fā)射功率;G為天線功率增益;λ為雷達工作波長;σ0為目標后向散射面積;Fn為接收機噪聲系數(shù);K為玻爾茲曼常數(shù);T0為接收機溫度;Ls為系統(tǒng)損耗;V為雷達速度;θi為波束入射角;α′為斜視角(波束中心與速度夾角的余角)的地面投影,即地面斜視角[4]。
(3)
也就是說,在不同的地面斜視角情況下,相同的雷達分辨率帶來的最大雷達作用距離是不同的[5]。
根據(jù)這個關(guān)系得到,對于給定的分辨率ρr,在波束掃描范圍不同時,滿足最小雷達信噪比的成像距離。這是本文設(shè)計雷達成像區(qū)域規(guī)劃軟件時的第2個約束,在給定分辨率和最小可成像信噪比的情況下,可成像最大斜距隨地面斜視角變化而變化的約束條件。在掃描范圍內(nèi)雷達目標斜距小于邊界條件的區(qū)域內(nèi),雷達可以成出滿足分辨率的圖像。
2 軟件實現(xiàn)
本設(shè)計通過MATLAB中的GUI函數(shù)界面實現(xiàn),實現(xiàn)界面如圖4所示。界面左側(cè)為雷達輸入信息和成像需求約束,分別為雷達位置、姿態(tài)、速度輸入以及雷達的波束掃描角度、作用距離和雷達左右視設(shè)定,通過第1節(jié)中波束解算,根據(jù)這些參數(shù)可得到雷達的波束能滿足的掃描區(qū)域,在右側(cè)成像區(qū)域規(guī)劃結(jié)果中表現(xiàn)為主要約束成像區(qū)域的第1個約束。雷達分辨率決定了雷達在不同斜視角情況下雷達的成像距離,這是雷達成像區(qū)域規(guī)劃的第2個主要約束。綜合2個約束條件,可得到雷達實際可成像區(qū)域在地理坐標系的投影。左側(cè)涂色區(qū)域代表了規(guī)劃出的雷達可成像區(qū)域,根據(jù)地面點間距對區(qū)域網(wǎng)格化,并按照間隔將成像點的具體參數(shù)輸出。

圖4 成像區(qū)規(guī)劃軟件
設(shè)計出的典型結(jié)果如圖5所示。
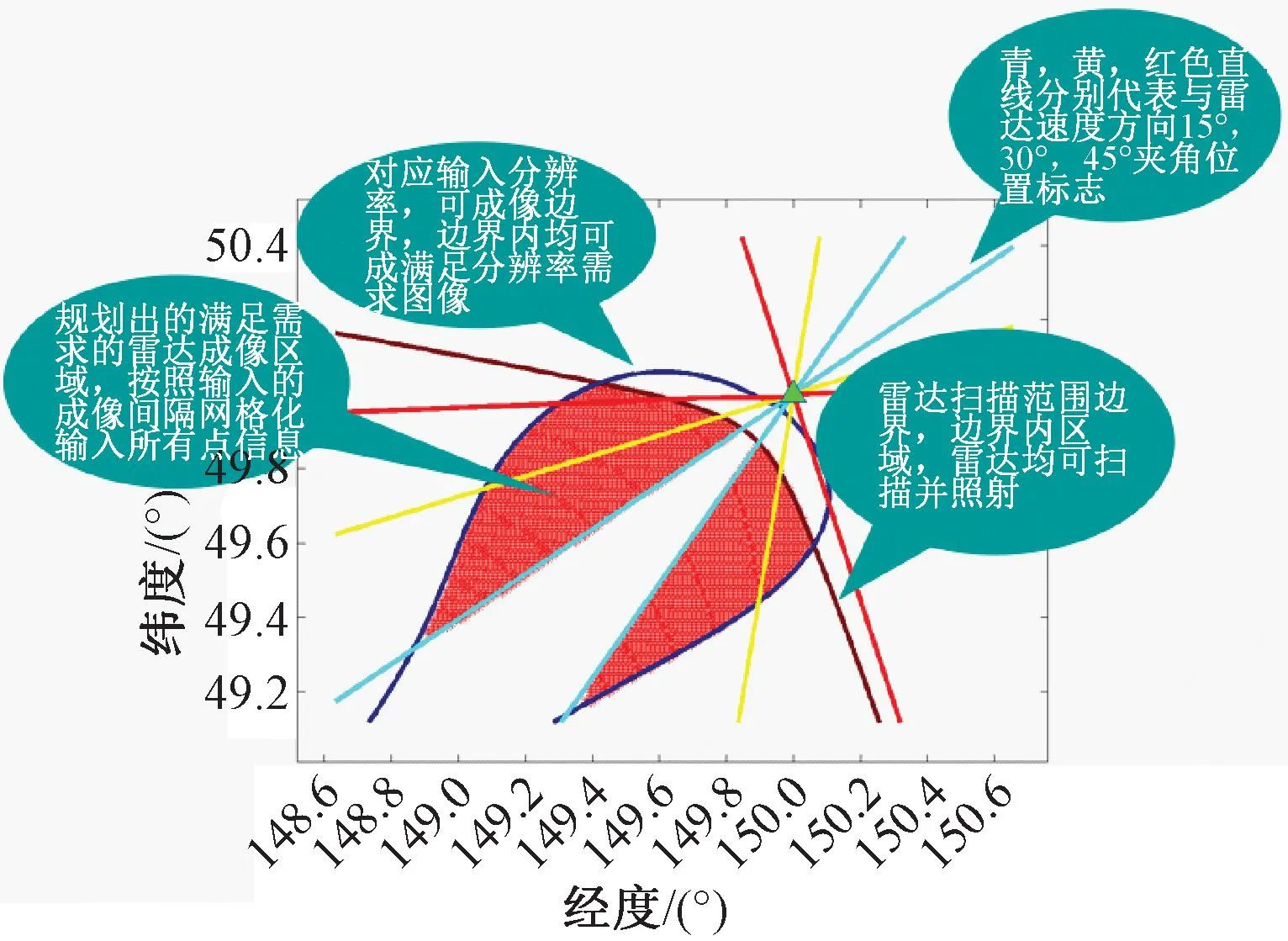
圖5 雷達成像區(qū)規(guī)劃GUI函數(shù)規(guī)劃結(jié)果及注釋
3 仿真驗證
仿真設(shè)計主要針對同一姿態(tài)不同分辨率約束和同一分辨率不同姿態(tài)條件2種方式進行,具體雷達參數(shù)如表1所示。

表1 仿真時的雷達參數(shù)
根據(jù)表1的參數(shù)可得出如下仿真結(jié)果。圖6分別為航向角為135°、90°、45°、0°時規(guī)劃成像區(qū)域的結(jié)果,此時設(shè)計分辨率為15 m×15 m,飛機水平速度方向為北偏東127°。
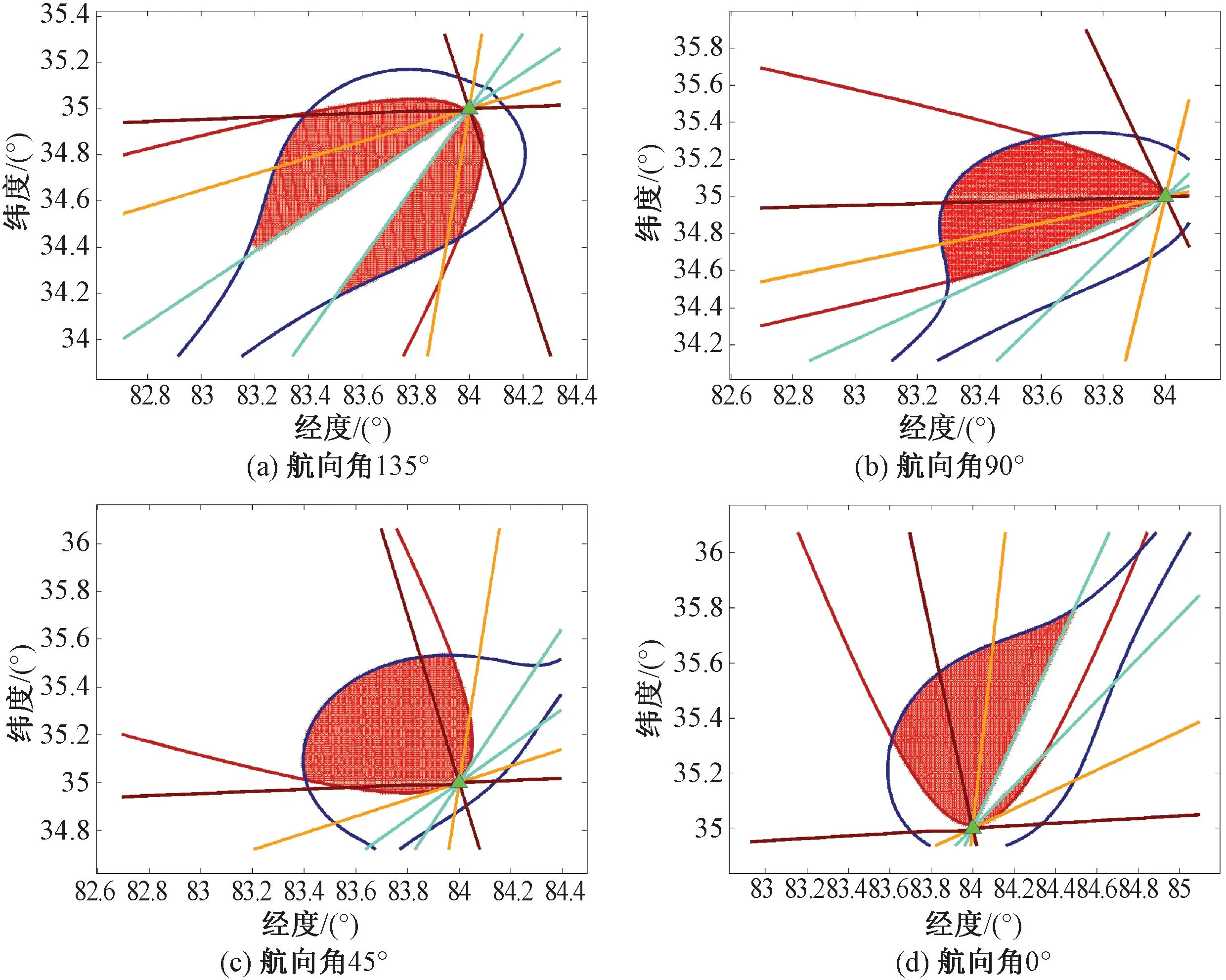
圖6 在不同掃描方位情況下成像區(qū)規(guī)劃函數(shù)運行結(jié)果
圖7分別為雷達不同成像分辨率時成像區(qū)域規(guī)劃結(jié)果,此時航向角為135°,雷達水平速度方向為北偏東127°。
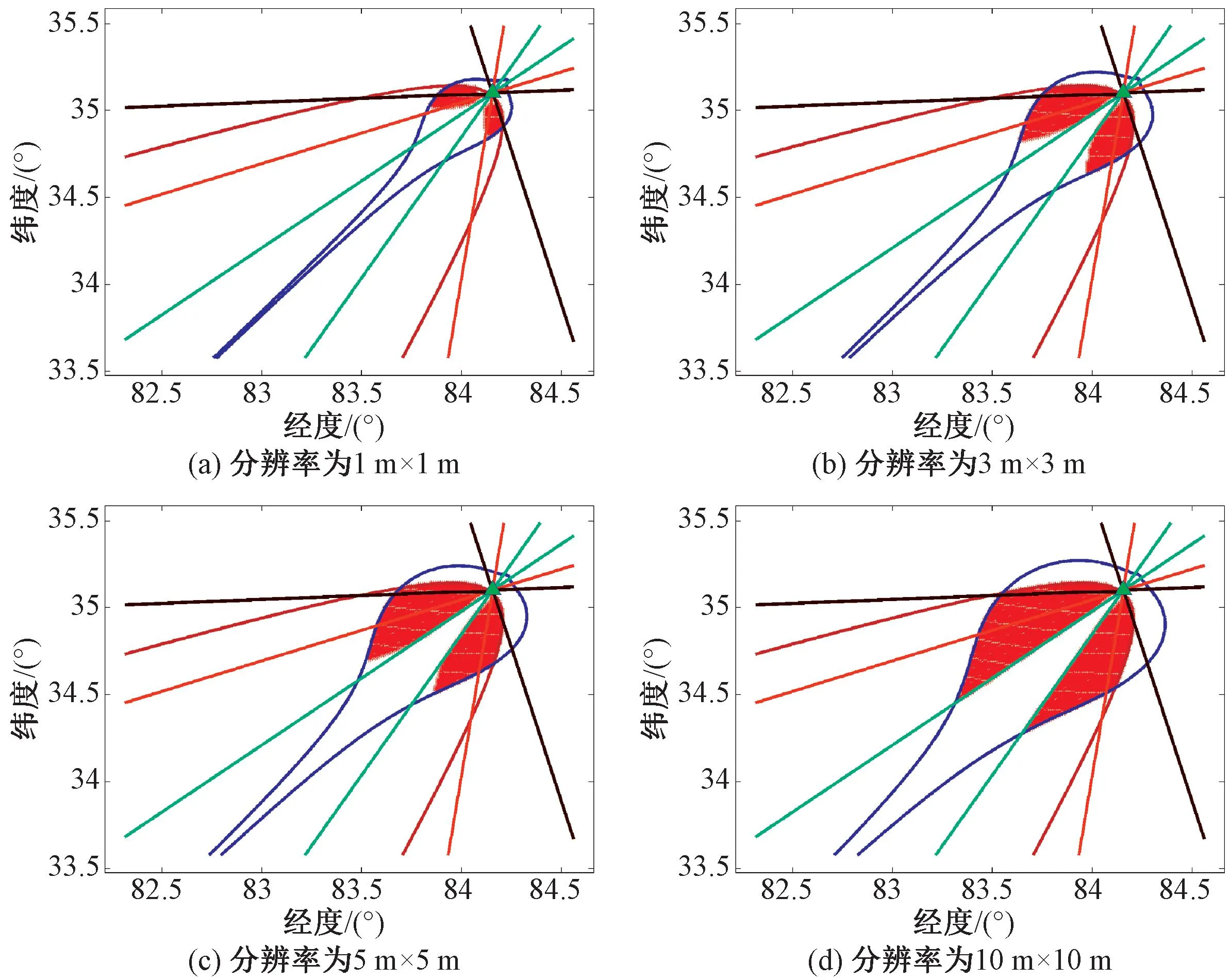
圖7 不同分辨率情況下成像區(qū)規(guī)劃函數(shù)運行結(jié)果
對于滿足成像需求的點,將其成像時的幾何關(guān)系等存儲為mat文件,導(dǎo)出為表格實例如表2所示。
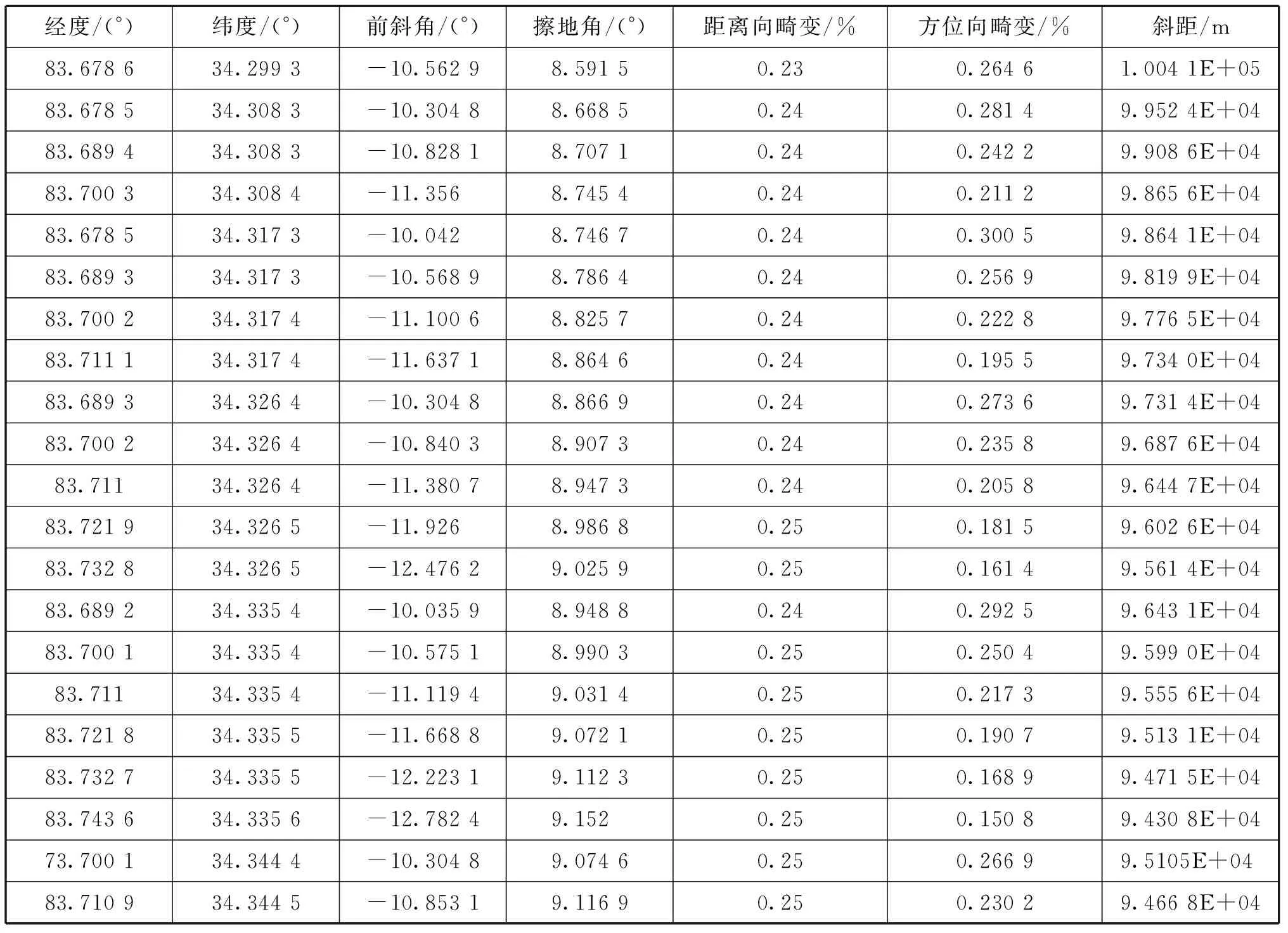
表2 規(guī)劃出成像點位置等部分參數(shù)
4 結(jié)束語
本文通過分析推導(dǎo)完成了對雷達波束指向及掃描范圍的解算,分析了不同運動狀態(tài)和斜視角情況下滿足不同分辨率需求的最大成像距離,綜合2個約束條件得到雷達成像覆蓋范圍,并投影到地理坐標系,通過對設(shè)計出的結(jié)果區(qū)域網(wǎng)格化,完成SAR成像區(qū)域快速規(guī)劃。該方法可應(yīng)用于掛飛試驗和地面仿真試驗,實現(xiàn)對地面可成像區(qū)域的快速分析,提高成像區(qū)規(guī)劃效率。
猜你喜歡
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學生(2021年3期)2021-03-25 11:48:49
公民與法治(2020年11期)2020-07-25 02:02:06
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
中國工程咨詢(2016年4期)2016-02-14 07:28:28