一種基于主動聲吶圖像多重累積的航跡起始方法
2024-01-13 12:17:28焦君圣
水下無人系統學報 2023年6期
關鍵詞:檢測
王 凱,焦君圣
(中國計量大學 計量測試工程學院,浙江 杭州,310000)
0 引言
水下運動目標自主檢測[1-2]是水聲領域研究的熱點和難點問題。航跡起始在自主檢測中占據重要位置,其目的是在較短掃描時間范圍內快速確認航跡,準確的起始航跡能避免多目標跟蹤中航跡關聯的組合爆炸情況。目前,航跡起始方法[3-5]主要有2 類: 一類是如直觀法、邏輯法和修正邏輯法的順序處理方法;另一類是如Hough 法和Hough變換的批處理方法。主動聲吶采樣率高,采樣周期長,導致聲吶圖像序列像素點多,基于Hough 變換的一系列算法無法直接應用于主動聲吶的目標檢測。
檢測前跟蹤(track before detect,TBD)技術有3 大優點: 對單幀數據無閾值處理,保留所有的目標信息;基于跟蹤思想的軌跡搜索,避免了復雜的數據關聯;利用多幀數據積累能量進行決策,提高目標的正確檢測概率[6]。近年來,一些學者在采用TBD 方法和Hough 變換進行目標檢測方面做了大量研究[7-9]。Hadjira 等[10]提出了一種實時霍夫變換(real time Hough transform,RTHT),用于實時自啟動處在雷達雜波信號中的軌跡,僅對滿足速度和加速度測試的測量值進行變換,大大縮短了處理時間,但無法適用于非均勻雜波情況。滕婷婷[11]使用擇大的聲圖像序列累積方式,利用雙門限檢測機制結合Hough 變換解決了多輸入多輸出(multiple input multiple output,MIMO)動目標檢測問題,但圖像中的目標像素點過多,難以形成航跡,檢測結果粗糙。Wang 等[12]通過波束域數據歸一化抑制混響,累積多幀數據后進行Hough 變換,實現弱目標檢測,但其并未討論累積后過門限檢測問題。李子高等[13]基于水下無人平臺通過檢測聲吶方位歷程圖,利用修正的Hough 變換-檢測前跟蹤(Hough transform-track before detect,HT-TBD)方法自主檢測水下可探測目標,但其檢測輸出為一條直線,不能給出航跡頭和航跡尾,無法進行后續目標跟蹤。
針對上述問題,文中在主動聲吶強混響背景下,提出一種基于聲吶圖像多重累積的水下多目標航跡起始方法。針對主動聲吶航跡起始過程中水下目標運動特性,構建強混響背景下多目標運動模型,利用常規空時處理和二維恒定虛警率(constant false alarm rate,CFAR)檢測方法生成距離-方位-幀時間三維聲吶序列圖像,研究擇大累積的多幀累積方法和質心聚類的量測點跡提取方法,獲取了目標的方位信息和能量信息。為實現多目標航跡起始任務,研究局部峰值檢測的Hough 變換方法,得到了多目標初始航跡。通過速度約束條件以及航跡合并,剔除了混響并合并重復航跡。該方法不僅可實現水下運動目標自主檢測,更給出了目標在累積的幀時間范圍內的出現時刻,因此可以作為主動聲吶水下多目標跟蹤的航跡起始算法。
1 水下多目標航跡起始模型
主動聲吶通過發射某種形式的聲信號,并利用水下目標的信號反射回波進行探測。由于回波中包含了目標信息,所以可根據目標回波信號來判斷目標的存在,并測量或估計目標的距離、方位等參量。因而,主動聲吶逐漸成為水下目標探測的重要手段之一。圖1 給出了主動聲吶水下多目標運動示意圖。
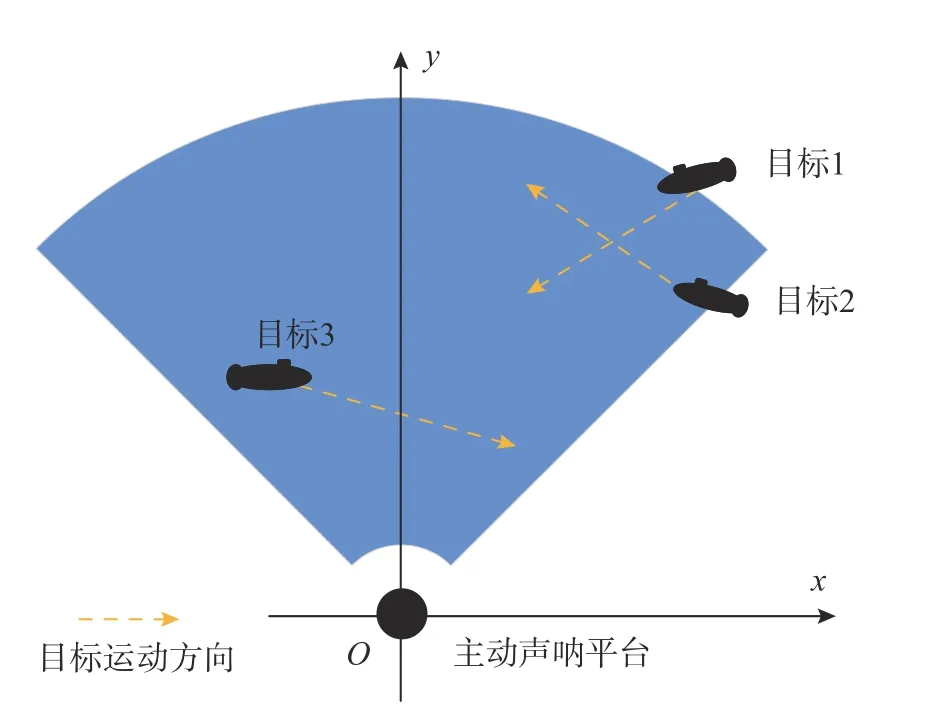
圖1 水下多目標航跡起始模型Fig.1 Underwater multi-target track initiation model
在直角坐標系xOy中,假設主動聲吶平臺位于坐標系原點處,由N個均勻線列陣組成。對聲吶回波數據按照距離分段處理,考慮第d個距離分段第k幀目標回波數據為
2 聲吶圖像多重累積航跡起始算法
基于聲吶圖像多重累積的水下多目標航跡起始算法流程如圖2 所示。算法對陣列采樣數據進行預處理,獲取各幀聲吶圖像;累計各幀聲吶圖像并輸出量測點跡;然后通過Hough 變換進行能量累積,并通過速度約束剔除混響。

圖2 水下多目標航跡起始算法示意圖Fig.2 Underwater multi-target track initiation algorithm
2.1 聲吶圖像擇大累積
聲吶圖像序列累積不同于雷達中的相干累積。由于聲吶設備的刷新率較低,難以在同一位置對目標進行多次成像,因此無法進行相干累積。為降低主動聲吶非相干累積帶來的信噪比損失,同時獲取各目標出現的掃描批次,首先對各掃描批次的聲吶陣列數據進行波束成形,然后通過匹配濾波得到目標的空時信息,通過二維CFAR檢測器[14]獲取多幀聲吶圖像,即距離-方位-幀時間三維圖像f(θ,r,k),對圖像中各個像素點進行擇大累積,即
同時獲取累積幀矩陣a(r,θ),以記錄各像素點擇大累積數據所在的掃描批次。
文中所述擇大信噪比累積的方法將距離-方位-幀時間三維圖像序列壓縮成距離-方位二維圖像,同時記錄了各個像素點輸出值的所在維度k,即掃描批次。因此,在判斷某個目標所在方位的同時,也獲取了該目標在累積過程中的掃描批次,這對于航跡起始至關重要。
2.2 基于質心聚類的量測點跡提取
基于TBD 的二維聲吶圖像像素點多,同一目標在聲吶圖像中會產生目標聚類[15],因此直接使用Hough 變換將累積圖像投影到參數空間進行目標檢測是不現實的。文中通過圖像分割算法,選取擇大累積聲吶圖像中過信噪比門限的1 個或多個像素點作為生長點,依據一定的生長準則逐步增長連接區域,直至沒有可以歸并的像素點位置,進而求出連續區域U,并使用U的質心代替該連續區域。
對聲吶圖像按照距離域均勻分段,每一段設置不同信噪比門限 δSNR,分別對各段聲吶圖像進行門限檢測,將過門限的像素點作為生長點。通過圖像分割算法求出連續區域,將滿足門限條件的連續區域U作為1 個目標整體,再采用質心法求取該連續區域的質心,用質心代替該區域。
質心計算公式為
利用上述方法可以計算目標方位 (rG,θG),目標能量為e(rG,θG),目標出現的掃描批次為a(rG,θG)。至此,獲得了目標的量測信息通過極坐標轉換,將目標量測中的方位信息轉換到直角坐標系中,得
2.3 距離分段的Hough 變換算法
首先,構建量測數據矩陣,整合第d個距離分段第k幀量測數據,則第d個距離分段數據矩陣為
對第d個分段,選取分辨率nd,構建映射矩陣
其次,將量測數據經過Hough 變換映射到參數空間的曲線。根據Hough 映射公式ρ=xcos(θ)+ysin(θ),d分段數據矩陣B(d)映射后的參數空間矩陣為
再次,構建參數空間并進行參數空間離散化。對d分段對應的參數空間矩陣H(d),將參數空間離散分割成個小格,構成離散單元,每個離散單元的中心點為
對分段的各量測數據重復上述過程即可完成對能量累積矩陣和數據記錄矩陣的累積。基于主動聲吶多目標航跡起始的難點在于難以確定初始航跡量測點集合中各量測目標的掃描批次,文中在對參數空間進行能量累積的同時,建立相同維度的數據記錄矩陣,當離散單元對量測點進行能量累積的同時,數據記錄基陣同時記錄該量測點的方位、所在距離分段及掃描批次等信息,便于在Hough 逆變換后進行混響剔除。
2.4 Hough 參數空間局部峰值檢測
當聲吶圖像序列中目標呈直線分布時,在Hough 參數空間中會出現峰值,且圍繞峰值的離散單元分布類似于蝴蝶狀,稱之為蝶形分布[16],如圖3所示。Hough 變換的能量累積矩陣是一個三維曲面,首先在其中確定極大值點作為局部峰值備選點,然后向備選點的四聯通區域的方向拓展,直到達到能量累積值的波谷點,記錄能量衰減值,定義該備選點的峰突強度為四聯通方向上能量衰減的最小值。

圖3 具有噪聲分布的聲吶圖像參數空間累積圖(局部)Fig.3 Spatial accumulation map of sonar image parameters with noise distribution(local)
設置閾值δ,若峰突強度大于δ,則認為該離散單元符合檢測條件,對該離散單元進行Hough 逆變換,得到初始航跡。
在主動聲吶多目標航跡檢測過程中,如果聲吶圖像中過門限的背景混響和運動目標航跡處在同一直線上,初始航跡會存在混響。一般情況下,背景混響點跡和目標點跡不符合目標運動約束條件,因此,可以通過對初始航跡進行速度約束,剔除不滿足速度約束條件的點跡。
3 仿真驗證
3.1 參數設置
考慮水下目標低航速運動特點,較短時間內航深、航速和航向基本保持不變,可以假設目標在二維平面內作勻速直線運動。主動聲吶探測區域范圍[0.75 km,11.25 km]、[60?,120?],海水聲速平均值為1 500 m/s,目標運動速度均為12 m/s。均勻線列陣聲吶位置為 (0 km,0 km),陣元數目為96,輸出波束數目為384,陣元間距為搜索最高頻率對應波長的1/2。多目標運動狀態及信噪比情況如表1 所示。

表1 目標運動參數Table 1 Motion parameters of targets
對線列陣接收信號進行處理,連續采樣次數10 次,采樣周期15 s。將聲吶序列圖像按照距離平均分成3 段分別進行Hough 變換,參數空間網格數按照分段分別取400、300 和200,局部峰值檢測門限為局部峰值的3/4。
3.2 方法可行性驗證
TBD 算法普遍采用將多幀聲吶圖像求和平均的累積方式對目標航跡展開研究,由于背景噪聲的影響,累積次數過多會造成信噪比大幅降低,過少則不足以體現連續性。在文中提出的擇大累積的基礎上,累積次數較多情況下信號信噪比降低不明顯。擇大累積次數不宜過少,過少不足以體現航跡連續性,但也不宜過多,過多會大大增加計算成本,一般10~30 次為宜。
以仿真線列陣聲吶回波信號為基礎對文中算法的檢測性能進行仿真研究。選用10 次聲吶圖像進行擇大累積以提高檢測效率。10 次擇大累積后的聲吶序列圖像如圖4 所示。累積后量測數據點分布及質心聚類后量測數據點分布分別如圖5 和圖6 所示,可以看出,用質心代替目標量測聚類后,可以大幅降低數據點數目。

圖4 10 次擇大累積后聲吶序列圖像Fig.4 Sonar sequence image after maximum accumulation of 10 times

圖5 10 次擇大累積后量測數據點分布Fig.5 Distribution of measurement data points after maximum accumulation of 10 times

圖6 質心聚類后量測數據點分布Fig.6 Distribution of measurement data points after centroid clustering
根據2.3 和2.4 節距離分段Hough 檢測和局部峰值檢測方法,對質心聚類后的量測數據點進行Hough 變換。在強混響背景下,使用質心方法代替目標聚類容易在角度域產生偏差,距離越近,混響導致的偏差越大。文中通過調整不同距離分段Hough 參數空間的離散網格數目加以平衡,不同距離分段的量測數據進行Hough 變換由近到遠設置參數空間離散網格數目分別為200、300、400,得到參數空間累積圖和數據記錄矩陣。參數空間累計圖和局部峰值檢測結果分別如圖7 和圖8 所示。對單目標的航跡起始,可在參數空間累積圖中直接取累積值的最大值作為初始航跡輸出。當對多目標進行航跡起始時,參數空間會形成多個局部峰值,此時使用局部峰值檢測可以有效獲得初始航跡。

圖7 參數空間累積圖Fig.7 Parameter space accumulation
數據記錄矩陣中存儲了各參數空間離散單元中累積的量測點跡的掃描批次、方位和能量信息,通過數據記錄矩陣對局部峰值檢測結果進行Hough逆變換獲取初始航跡。再利用航跡起始滑窗法的M/N 邏輯原理剔除不合理航跡,將初始航跡完全相同的特征點進行合并。為了有效剔除初始航跡中的混響,可對初始航跡進行速度約束,檢測優化處理后的輸出航跡如圖9 所示。
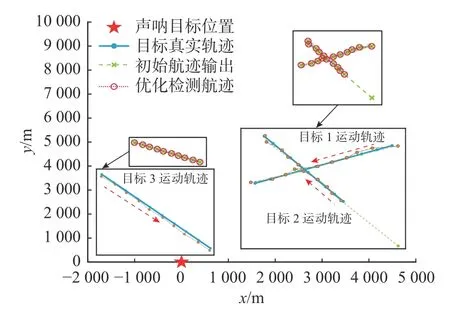
圖9 目標航跡輸出圖像Fig.9 Output image of target track
由圖9 可知,文中算法航跡起始輸出和目標真實航跡具有一定偏差,這是受常規空時處理中的方位角誤差和質心聚類的影響,初始航跡輸出和目標真實航跡無法完全重合,但是對航跡起始結果沒有影響。
3.3 不同條件下的性能分析
為了進一步驗證算法的可行性,仿真時主要考慮到主動聲吶的測距誤差和測角誤差對檢測性能的影響。文中對不同的誤差各進行500 次Monte Carlo 仿真試驗,以平均值作為最終的檢測性能指標,圖10 給出了檢測處理結果。

圖10 不同條件下的檢測性能Fig.10 Detection performance under different conditions
由圖10 可知,主動聲吶的測距誤差和測角誤差等技術指標直接決定了算法的檢測性能。其中,測角誤差是影響算法性能最主要的因素,當其在2°范圍內逐漸增加時,文中算法的檢測概率將顯著下降。這與算法波束數目的設置和采取何種波束成形算法直接相關。
4 結束語
航跡起始在水下運動目標自主檢測過程中起著舉足輕重的作用,針對主動聲吶回波信號空時處理后數據量龐大的問題,提出了一種基于主動聲吶圖像多重累積的航跡起始算法。該方法具有如下優勢: 1) 在對距離-方位-幀時間三維聲吶圖像序列進行降維累積的同時,記錄了目標的掃描批次,盡可能保留了目標的完整信息;2) 使用質心聚類的方法提取目標點跡,降低了目標像素點數目,大幅提高航跡起始速度;3) 局部峰值檢測的方法實現了多目標初始航跡輸出,避免了門限檢測的主觀性。仿真結果表明,該算法有效降低了航跡起始過程中聲吶圖像的數據量,在強混響背景下仍能以高檢測概率實現水下多目標自主檢測。文中方法以常規空時處理后的聲吶圖像為基礎展開研究,因此目標量測信息估計精度存在較大偏差,后續可對目標方向位置精度加以改進。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
