PLC 技術在農業機械電氣控制裝置中的應用*
2024-01-13 08:09:14顧曉宇
南方農機 2024年2期
顧曉宇
(齊齊哈爾工程學院,黑龍江 齊齊哈爾 161000)
毋庸置疑,農業機械電氣控制裝置在現代農業生產中起著不可或缺的作用。然而,傳統電氣控制裝置存在著諸多挑戰與問題,如可靠性低、靈活性差、控制復雜度高等。PLC 技術作為先進的控制技術,因具有靈活性高、可靠性高及可編程性等優勢而被廣泛應用于各個領域。將PLC 技術引入農業機械的電氣控制裝置中具有重要現實意義,不僅能夠有效降低人工操作的錯誤率與煩瑣性,減少故障與停機時間,提高系統的可靠性,還有助于提高農業生產的穩定性與連續性,增強系統的可擴展性與靈活性,使系統可以適應變化的農業生產需求,從而進一步推動農業現代化進程。
1 PLC技術
1.1 PLC定義與優勢
PLC(可編程邏輯控制器)專門用于工業自動化控制,主要通過編寫代碼來實現各種控制功能,如輸入輸出控制、數據處理及邏輯運算等。其可以按照預先編寫的程序來自動執行各種操作,從而實現準確控制機械設備[1]。PLC 技術在農業機械相關領域的應用具有多重優勢:1)提高控制系統的可靠性。PLC包含高度可靠的軟件與硬件系統,可以有效避免傳統電氣控制裝置中的停機問題與故障。2)增強系統的可擴展性與靈活性。PLC 能夠按照不同的農業生產需求來靈活擴展與配置,更好地適應變化的農業機械控制要求。3)實現智能化管理與自動化控制。通過編寫相應的程序,PLC 能夠實現農業機械的智能化管理與自動化控制,降低人工操作的錯誤率與煩瑣性,從而提高工作質量與效率。
1.2 PLC的應用原理
PLC 主要組成部分有電源、CPU(中央處理器)、存儲器及多種接口等。電源的主要作用是為PLC 提供可靠的電力供應,保證其正常運行;CPU 作為PLC的核心部件,主要用于執行預先編寫的程序,同時完成數據處理、邏輯運算及控制指令的執行;存儲器主要負責存儲程序、數據與其他臨時信息,以便于CPU進行后續的處理和操作;接口有很多種,如輸入接口、輸出接口、通信接口、擴展接口等,主要功能是連接輸入設備、輸出設備、擴展單元及通信設備,從而實現與外部設備的數據傳輸與交互[2]。其中,輸入接口涉及輸入端子與各種輸入設備,如觸點、按鈕、行程開關等,其主要將外部輸入信號轉換成數字信號,以便于CPU 完成處理和判斷;輸出接口涉及輸出端子與各種輸出設備,如電磁閥、電磁線圈及指示燈等,其主要用于將處理后的數字信號轉換成控制信號,并驅動對應的輸出設備完成操作;PLC 利用通信接口與計算機、人機界面、寫入器、編程器及其他PLC 等設備相連,進行遠程控制與數據傳輸;擴展接口用于連接各種擴展單元,如專用功能模塊、通信模塊及模擬輸入輸出模塊等擴展單元,以更好地滿足多樣化的應用需求[3]。
PLC 的應用原理基于邏輯控制,通過編寫特定的程序,PLC 能夠按照不同輸入信號的邏輯條件來完成相應的操作與控制。例如,當某個按鈕被按下時,PLC 能夠按照程序中已設定的邏輯條件來觸發對應的輸出信號,如電磁閥打開、控制指示燈亮起等[4]。PLC 技術的優勢在于它具有較好的靈活性與可編程性,能夠按照實際需求來靈活調整與配置控制邏輯。通過合理設計與編寫程序,PLC 能夠實現復雜的控制功能,更好地滿足農業機械電氣控制裝置中的多樣化需求,并實現精確控制和管理農業機械。PLC 應用原理示意圖如圖1所示。
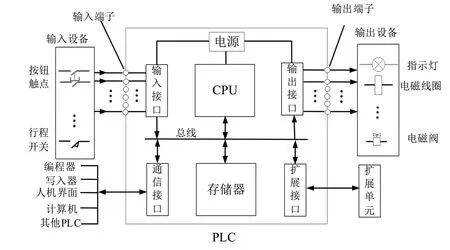
圖1 PLC應用原理示意圖
2 PLC技術在農業機械中的應用
2.1 應用于農業收獲機電氣自動化控制裝置中
以番茄收獲機自動化轉速控制裝置為例,在硬件系統設計方面,硬件系統涉及模擬量輸出模塊、觸摸屏、旋轉編碼器、PLC等,使用高速輸入端口將PLC與旋轉編碼器相連,實現實時監測馬達旋轉速度。在軟件系統設計方面,利用觸摸屏來設置轉速等臨界值,如果馬達轉速低于或超出設定的臨界值,PLC 能自動發送對應的轉速調節指令給線性控制器,通過PID 控制器來閉環調節馬達轉速[5]。具體設計涉及PLC程序設計、觸摸屏人機界面設計及PID控制算法設計。
結合轉速控制要求來編寫PLC 程序,程序涉及采集和處理旋轉編碼器輸入信號,實時監測轉速是否達到臨界值及使用PID 控制算法計算出合適的調節量,并將其發送給驅動器完成轉速控制。通過觸摸屏界面,用戶能夠設定轉速臨界值,實現實時監測馬達轉速,與此同時,觸摸屏界面還能夠實時顯示馬達當前轉速、轉速控制的狀態及設定好的臨界值。PID 控制算法充分利用內部的PID 控制功能塊,結合當前轉速的偏差與設定好的轉速臨界值,能夠計算出一定的調節量,再將調節量發送給驅動器,完成閉環調節馬達轉速,從而確保轉速始終維持在設定的范圍內[6]。通過引入PLC 技術,農業收獲機能夠實現實時監測和自動調節轉速,從而提高收獲機的穩定性與運行效率,運用PLC 技術使轉速控制更可靠精準,為現代農業生產提供有力的數據支持與技術支撐。
2.2 應用于農業拖拉機自適應平衡控制裝置中
農業拖拉機在實際作業過程中往往存在傾斜、顛簸及高低不平等問題,這很影響其作業路線與效果。為有效解決這些問題,設計一種可靠合理的拖拉機自適應平衡控制裝置至關重要。而合理應用PLC 技術有助于實現自適應平衡控制。自適應平衡控制的流程與思路為:進入自適應平衡控制程序,首先利用傳感器獲得拖拉機的機身傾斜角度,并檢測機身傾斜角度是否超出設定好的閾值,如果機身傾斜角度小于已設定閾值,則重新檢測機身傾斜角度,反之,如果機身傾斜角度不小于已設定閾值,此時需要調節車身平衡,程序將自動執行調節車身平衡的操作[7]。基于PLC 的拖拉機自適應平衡控制程序的主要流程如圖2所示。
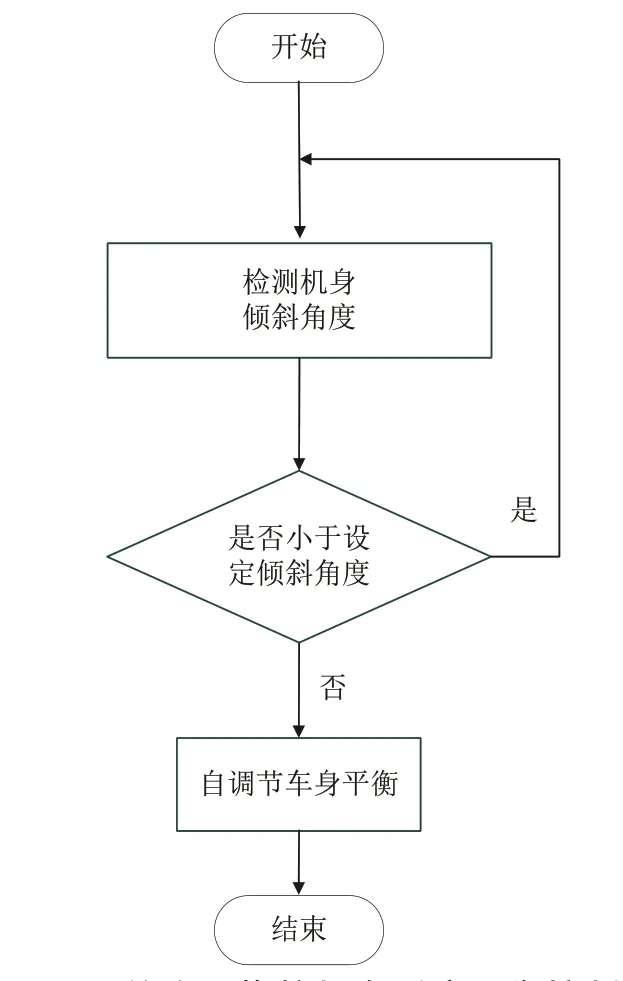
圖2 基于PLC 的農業拖拉機自適應平衡控制程序流程圖
實際設計中,在硬件設計方面,利用PLC 進行控制,使用傳感器來檢測,同時支持液壓缸響應,用電液比例控制閥完成驅動。傾角傳感器與位移傳感器的主要作用是檢測位移、傾角等關鍵參數,輸出模擬量信號。一個電液比例換向閥與四個液壓缸是主要執行元件,電液比例換向閥用于接收關鍵信號,當發生故障時,系統會立即停止工作,同時發出響聲報警。如果液壓缸滿足極限位置而沒有達到目標伸縮量,此時示警器也會發出相應的響聲報警,以提示系統需要停止工作。PLC 是電氣控制裝置的重要組成部分,需要結合實際設計與應用需求來選擇恰當的PLC 型號及其配置。軟件設計方面,該自適應平衡控制裝置的程序涉及主控制模塊與信號采集模塊。
主控制模塊用于控制拖拉機車身的平衡,而信號采集模塊用于收集與整合傾斜傳感器與位移傳感器采集到的關鍵信號。主程序通過利用傾角傳感器來檢測機身的傾斜角度,再將得到的傾斜角度傳遞至信號采集模塊,最后傳遞到PLC 中。PLC 使用比較單元來比對檢測到的傾斜角度信號值和已設定的傾斜角度極限值。如果小于極限值,不需要調節車身,反之,PLC 需要發送對應的控制指令給支撐缸,通過精準控制支撐缸的伸縮來完成拖拉機機身的自適應調節[8]。通過合理運用PLC 技術,拖拉機自適應平衡控制裝置可以實現較好的應用效果,有效避免因機身傾斜、顛簸而對作業造成的不良影響。
2.3 應用于農業播種機電氣自動化控制裝置中
將PLC 合理運用到農業播種機的電氣自動化控制裝置中,能夠實現出水量可控,保證設備速度與出水量成正比。基于PLC 的播種機電氣自動化控制裝置的設計包括控制方案設計、PLC 自動化控制設計、顯示模塊設計。在控制方案方面,PLC 作為核心控制模塊,是實現施水執行模塊、測速模塊、報警模塊、水位監測模塊等模塊功能的基礎。通過測速模塊,PLC 可以檢測播種機的運轉速度,而后將數據傳遞至主機,實現合理靈活調整,從而確保出水量的可控性與靈活性,達到設備速度與出水量成正比的目的。
在PLC 自動化控制方面,PLC 的主要組成部分有中央處理單元、儲存器、電源、輸入單元及輸出單元等,具體工作過程涉及輸入采樣、程序執行與輸出刷新三個重要環節。使用掃描功能將輸入狀態的數據儲存到I/O 映像區域,程序執行時PLC 將根據順序來掃描控制程序,結合邏輯運算結果來控制儲存位置的邏輯線圈位置狀態,同時刷新I/O 映像區域的線圈輸出狀態[9]。合理運用PLC 來實現自動化控制,從而達到播種機的施水信息化與自動化控制。
顯示模塊包括故障預警模塊、施水控制模塊、數碼管模塊、測速模塊等,其中,測速模塊負責將采集到的數據上傳到PLC,數據經PLC 處理后展現在LED 單元上;數碼管模塊有7 段與8 段兩種形式,按照輸入的低電平來組合點亮對應的LED;施水控制模塊綜合使用大扭矩舵機與出水管路來實現精準控制;監測模塊負責利用液位傳感器來監測水位,如果水位低于規定參數,就發出相應報警;故障預警模塊用于采集主要部件的關鍵參數,如果發生故障,需要立即發出預警。這些模塊相互配合,共同完成農業播種機的信息化與自動化控制。將PLC 技術與播種機的自動化控制裝置緊密結合,可以實現出水量可控,使設備速度與出水量成正比,從而顯著提高作業效率與質量。
3 在農業機械中應用PLC技術的注意事項
需要合理選擇PLC 型號與配置,保證系統的穩定性與可靠性,注意電氣安全與防護措施。實際選擇PLC 型號與配置時,要結合農業機械具體型號進行合理的評估與選擇,選擇具有足夠控制能力、輸入輸出接口的PLC 型號,同時,該PLC 還應該支持擴展[10]。在可靠性和穩定性方面,綜合考慮電源穩定性、環境適應性、溫度控制、抗干擾能力等,通過采取必要的防范措施來提高系統的穩定性與可靠性。此外,要定期檢查PLC 設備的線路、接口等,采取過載保護、接地保護及電氣隔離等系列防護措施,保障電氣控制裝置安全運行。
4 結語
綜上所述,將PLC 技術應用于農業機械電氣控制裝置中,可以提高農業機械的智能化水平與自動化程度,顯著增強系統的可靠性與穩定性,減少故障與停機時間,使農業機械更好地適應多樣化的農業生產需求,使農業生產更精確、可控、高效,為現代農業生產提供靈活的管理與控制方案。
猜你喜歡
今日農業(2022年1期)2022-11-16 21:20:05
今日農業(2022年3期)2022-11-16 13:13:50
今日農業(2022年2期)2022-11-16 12:29:47
今日農業(2021年14期)2021-11-25 23:57:29
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
通信電源技術(2018年5期)2018-08-23 01:16:18
電子制作(2018年11期)2018-08-04 03:25:42
電子制作(2017年19期)2017-02-02 07:08:54
山東工業技術(2016年15期)2016-12-01 05:31:49